Спосіб автоматичної компенсації відхилення лінії візування прицілу
Номер патенту: 86155
Опубліковано: 25.03.2009
Автори: Гордієнко Валентин Іванович, Хомченко Олексій Якович, Ревякин Леонід Дмитрович

Формула / Реферат
Спосіб автоматичної компенсації відхилення лінії візування прицілу, який полягає в тому, що спочатку здійснюють електронне аретування гіростабілізатора, потім в канали наведення лінії візування за висотою і напрямком вводять компенсаційні сигнали в протифазі по відношенню до напрямку відхилення лінії візування на основі виміру сигналів датчиків кутового положення головного дзеркала гіростабілізатора за висотою і напрямком, одночасно протягом цього часу вмикається світловий індикатор, який відрізняється тим, що після електронного аретування гіростабілізатора через заданий інтервал часу періодично вимірюють зміну величини сигналів датчиків кутового положення головного дзеркала за висотою ![]() і напрямком
і напрямком ![]() та порівнюють ці значення із заданою пороговою величиною
та порівнюють ці значення із заданою пороговою величиною ![]() , при цьому, якщо значення зміни сигналів датчиків
, при цьому, якщо значення зміни сигналів датчиків ![]() і
і ![]() більше значення
більше значення ![]() , то в канали наведення прицілу за висотою і напрямком із заданим періодом часу вводять компенсаційні сигнали, величина яких послідовно змінюється на величину кроку квантування, доти, поки значення
, то в канали наведення прицілу за висотою і напрямком із заданим періодом часу вводять компенсаційні сигнали, величина яких послідовно змінюється на величину кроку квантування, доти, поки значення ![]() і
і ![]() не стануть менше величини
не стануть менше величини ![]() , причому крок квантування компенсаційних сигналів забезпечує зміну сигналів датчиків
, причому крок квантування компенсаційних сигналів забезпечує зміну сигналів датчиків ![]() і
і ![]() на величину, не більшу половини значення
на величину, не більшу половини значення ![]() .
.
Текст
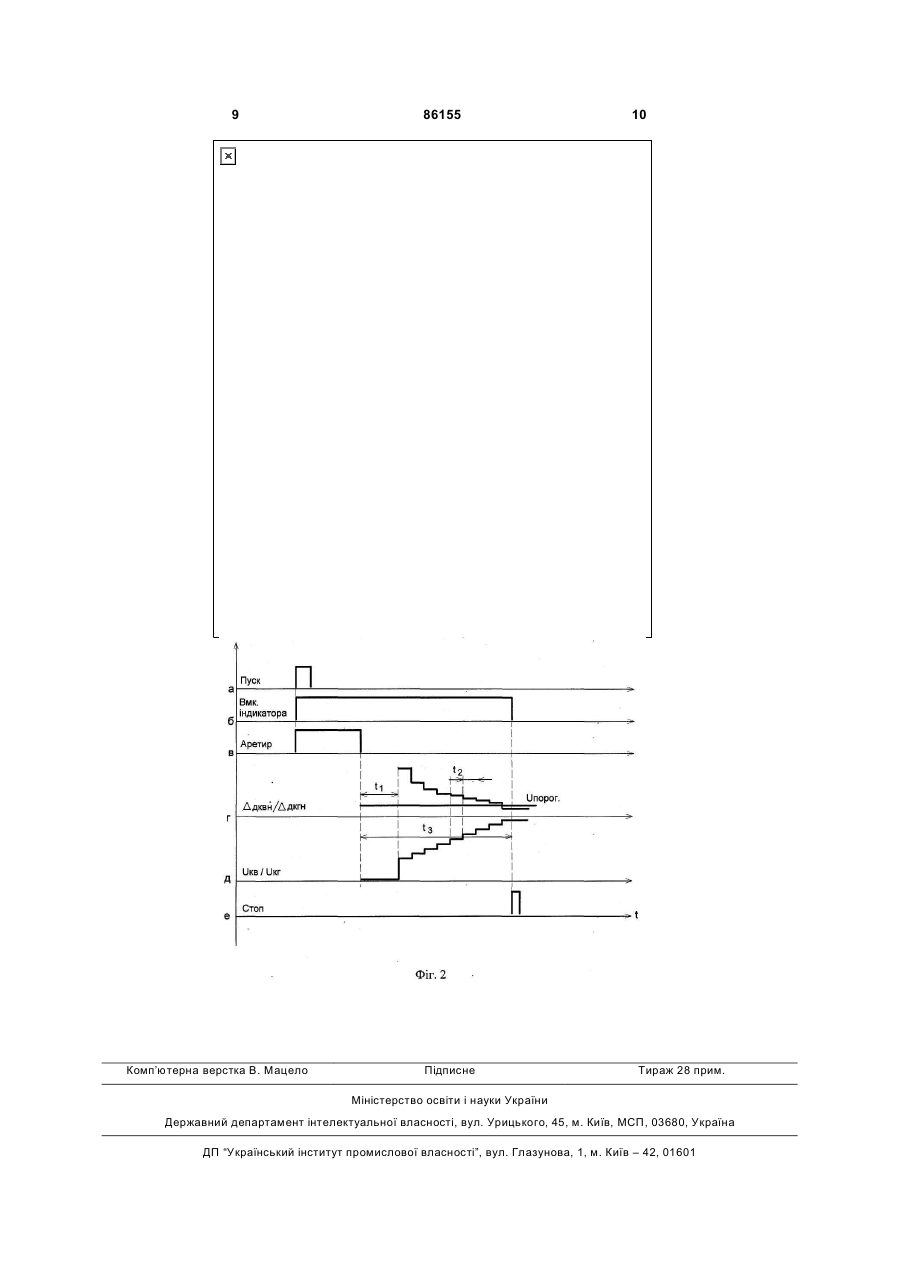
Спосіб автоматичної компенсації відхилення лінії візування прицілу, який полягає в тому, що спочатку здійснюють електронне аретування гіростабілізатора, потім в канали наведення лінії візування за висотою і напрямком вводять компенсаційні сигнали в протифазі по відношенню до напрямку відхилення лінії візування на основі виміру сигналів датчиків кутового положення голов C2 2 (19) 1 3 86155 4 Недоліками ручного способу компенсації віднапрямком через відповідні підсилювачі потужносхилення лінії візування приціла є: ті поступають на моментні двигуни наведення за - низька точність визначення компенсаційних висотою і напрямком, забезпечуючи компенсацію сигналів, яка полягає в суб'єктивній оцінці швидковідхилення лінії візування. сті відхилення оператором приціла, що ґрунтуєтьПринцип роботи відомого пристрою автоматися на візуальному контролі переміщення центрачної компенсації відхилення лінії візування прицільної прицільної марки (лінії візування) приціла ла, обраного за прототип, полягає в тому, що провідносно обраного оператором нерухомого об'єкту цес компенсації відхилення лінії візування в полі зору приціла; поділяють на два етапи - вимірювання величини - у тривалому процесі виконання операції комшвидкості відхилення лінії візування приціла за пенсації відхилення лінії візування приціла, викливисотою і напрямком та компенсація відхилення в каного ручним регулюванням потенціометрів і попроцесі роботи приціла. дальшою візуальною оцінкою величини Вимірювання компенсаційних сигналів відхикомпенсаційних сигналів. лення лінії візування за висотою і напрямком здійНайбільш близьким технічним рішенням, обснюється при вмиканні режиму компенсації відхираним за прототип, є спосіб автоматичної компенлення; при цьому вмикають світловий індикатор сації відхилення лінії візування приціла [див. Пат. для індикації вмикання режиму компенсації відхи49948, Україна, МПК F41G3/02. Спосіб автоматичлення. Потім забезпечують приведення гармати на ної компенсації відхилення лінії візування приціла певний кут і фіксацію її на жорсткій опорі, напригармати бронемашини і пристрій для його здійсклад, на куті зарядження гармати, що дозволяє нення / Хомченко О.Я., Ревякін Л.Д., Гордієнко В.І. усунути вплив відхилення приводу гармати, так як (Україна); заяв.04.01.2000; опубл.15.10.2002; гіростабілізатор приціла вертикального наведення Бюл.№10. -3с: іл.], який полягає в тому, що в канакінематично зв'язаний з гарматою. Вимикають ли наведення приціла за висотою і напрямком приводи гармати і башти на час вимірювання відвводять компенсаційні сигнали, пропорційні відхихилення і забезпечують проведення електронного ленню лінії візування за висотою та напрямком, в аретирування гіростабілізатора, що дозволяє усупротифазі по відношенню до напрямку руху відхинути вплив приводу башти і встановити датчики лення, приводять гармату на певний кут і фіксують кутового положення в нульовий стан. її положення на жорсткій опорі, вимикають привоДля визначення швидкості відхилення лінії віди гармати та башти, здійснюють електронне арезування задають часовий інтервал, у відомому тирування центральної прицільної марки (ЦПМ) пристрої не менше 30 секунд, після закінчення приціла, вимірюють значення сигналів датчика якого фіксують відхилення лінії візування (зміну кутового положення гіростабілізаторів за висотою сигналів датчиків кутового положення гіростабіліта напрямком з урахуванням їх фази відносно заторів), шляхом вимірювання на початку і в кінці опорних сигналів на початку і в кінці визначеного заданого часового інтервалу значення сигналів часового інтервалу, впродовж якого вмикають свідатчиків кутового положення гіростабілізатора за тловий індикатор, обчислюють швидкість відхивисотою і напрямком. Виміряні значення сигналів лення лінії візування за висотою та напрямком як датчиків запам'ятовують і використовують для частку від ділення величини зміни виміряних знаобчислення швидкості відхилення лінії візування чень сигналів відповідних датчиків кутового полоза висотою і напрямком шляхом ділення виміряних ження гіростабілізаторів на значення визначеного значень сигналів відповідних датчиків кутового часового інтервалу, формують компенсаційні сигположення на значення часу інтервалу вимірюнали, пропорційні обчисленій швидкості відхиленвання. При цьому пристрій компенсації відхилення ня лінії візування приціла за висотою та напрямформує компенсаційні сигнали, пропорційні обчиком, здійснюють повторне електронне сленій швидкості відхилення лінії візування за виаретирування ЦПМ приціла, вмикають приводи сотою та напрямком. гармати та башти. Після закінчення формування компенсаційних Пристрій автоматичної компенсації відхилення сигналів проводять повторне електронне аретируприціла [див. Пат. 49958, Україна, МПК F41G3/02. вання гіростабілізатора приціла, щоб запобігти Спосіб автоматичної компенсації відхилення лінії смиканню гармати та башти при вмиканні приводів візування приціла гармати бронемашини і пристрій гармати і башти, а також знімають індикацію редля його здійснення], що реалізує відомий спосіб жиму компенсації відхилення. Після чого в канали автоматичної компенсації лінії візування приціла, наведення лінії візування приціла за висотою і містить гіростабілізатори вертикального і горизоннапрямком вводять обчислені компенсаційні сигтального наведення, верхнє та нижнє дзеркало, нали у протифазі по відношенню до сигналів відмоментні двигуни вертикального і горизонтального хилення лінії візування. наведення, датчики кутів вертикального і горизонНедоліком відомого способу автоматичної тального наведення і підсилювачі потужності веркомпенсації лінії візування приціла є низька точтикального і горизонтального наведення, які заність обчислення компенсаційних сигналів відхибезпечують стабілізацію і наведення лінії лення лінії візування, обумовлена однократним візування. Формування компенсаційних сигналів у вимірюванням сигналів датчиків кутового половідомому пристрої здійснюється за допомогою ження гіростабілізаторів на початку і в кінці визнапристрою компенсації на основі вимірювання сигченого інтервалу часу, що не дозволяє усунути налів датчиків кутів вертикального і горизонтальвплив перешкод і забезпечити високу точність виного наведення, які поступають на пристрій компеміру сигналів датчиків кутового положення гіроснсації. Обчислені сигнали компенсації за висотою і табілізаторів. 5 86155 6 ли наведення приціла за висотою і напрямком із Іншим недоліком є значний час, що витрачазаданим періодом часу вводять компенсаційні сигється на процес вимірювання компенсаційних сигнали, величина яких послідовно змінюється на налів, для забезпечення заданої точності компенвеличину кроку квантування доти, поки значення сації. Чим вища точність компенсації відхилення лінії візування, тим більший потрібен інтервал часу Dдквн і Dдкгн не стануть менше величини Dп, придля вимірювання змін сигналів датчиків кутового чому крок квантування компенсаційних сигналів положення гіростабілізатора. забезпечує зміну сигналів датчиків Dдквн і Dдкгн на Ці недоліки знижують ефективність відомого величину, не більшу половини значення Dп. пристрою автоматичної компенсації відхилення Досягнення технічного результату при викориприціла по забезпеченню прицільної стрільби об'єстанні заявленого способу автоматичної компенкту БТТ, так як значний час компенсації відхилення сації відхилення лінії візування приціла з незалежпризводить до збільшення часу на підготовку посною лінією прицілювання полягає у скороченні трілу. А недостатня точність компенсації відхиленчасу компенсації відхилення за рахунок того, що ня лінії візування призводить до введення хибної через заданий інтервал часу періодично вимірюкутової швидкості цілі в СКВ, що приводить до ють зміну величини сигналів датчиків кутового пообчислення помилкових кутів прицілювання ложення головного дзеркала за висотою (Dдквн) і озброєння об'єкту БТТ. напрямком (Dдкгн) і порівнюють ці значення із заВ основу винаходу поставлена задача підвиданою пороговою величиною (Dп), а також високої щення точності компенсації відхилення лінії візуточності компенсації відхилення, яка забезпечування і скорочення часу її проведення за рахунок ється за рахунок того, що якщо значення зміни реалізації системи стеження контролю сигналів сигналів датчиків Dдквн і Dдкгн більше значення датчиків кутового положення головного дзеркала Dп, то в канали наведення приціла за висотою і приціла за висотою і напрямком та квантуванням напрямком із заданим періодом часу вводять комвеличини компенсувальних сигналів, яке визначапенсаційні сигнали, величина яких послідовно зміється заданою похибкою компенсації відхилення. нюється на величину кроку квантування доти, поки Суть винаходу у заявленому способі автомазначення Dдквн і Dдкгн не стануть менше величитичної компенсації відхилення лінії візування прини Dп, причому крок квантування компенсаційних ціла полягає в тому, що спочатку здійснюють елесигналів забезпечує зміну сигналів датчиків Dдквн і ктронне аретирування гіростабілізатора, потім в Dдкгн на величину, не більшу половини значення канали наведення лінії візування за висотою і наDп. прямком вводять компенсаційні сигнали в протиНа Фіг.1 зображена узагальнена структурна фазі по відношенню до напрямку відхилення лінії схема приціла з незалежною лінією прицілювання, візування на основі виміру сигналів датчиків кутощо реалізує запропонований спосіб автоматичної вого положення головного дзеркала гіростабілізакомпенсації відхилення лінії візування приціла. тора за висотою і напрямком, одночасно протягом На Фіг.2 приведені циклограми процесу автоцього часу вмикається світловий індикатор, досяматичної компенсації відхилення лінії візування гається за рахунок того, що після електронного приціла. аретирування гіростабілізатора через заданий Приціл з незалежною лінією прицілювання інтервал часу періодично вимірюють зміну вели(див. Фіг.1), що реалізує пропонований спосіб авчини сигналів датчиків кутового положення головтоматичної компенсації відхилення лінії візування, ного дзеркала за висотою (Dдквн) і напрямком містить: гіростабілізатор 1, кінематично зв'язаний з (Dдкгн) та порівнюють ці значення із заданою поголовним дзеркалом 2, кутове положення якого роговою величиною (Dп), при цьому, якщо значенвизначає напрямок лінії візування приціла, датчик ня зміни сигналів датчиків Dдквн і Dдкгн більше З кутового положення головного дзеркала за висозначення Dп, то в канали наведення приціла за тою (ДКВН), датчик 4 кутового положення головновисотою і напрямком із заданим періодом часу го дзеркала по горизонталі (ДКГН), пристрій 5 комвводять компенсаційні сигнали, величина яких пенсації відхилення, пульт 6 наведення, два послідовно змінюється на величину кроку квантусуматори 7 і 8, два комутатори 9 і 10 та світловий вання, доти, поки значення Dдквн і Dдкгн не стаіндикатор 11. нуть менше величини Dп, причому крок квантуванДля забезпечення проведення автоматичної ня компенсаційних сигналів забезпечує зміну компенсації відхилення лінії візування приціла на сигналів датчиків Dдквн і Dдкгн на величину, не перший вхід пристрою 5 компенсації відхилення більшу половини значення Dп. поступає імпульс "Пуск", по якому проводиться Порівняльний аналіз технічного рішення, яке запуск циклу компенсації відхилення, для чого заявляється, із прототипом, дозволяє зробити виперший вихід пристрою 5 компенсації відхилення сновок, що заявлений спосіб автоматичної компепідключений до керуючих входів комутатора 9 і 10, нсації відхилення лінії візування приціла, відрізняа осі обертання гіростабілізатора 1 за висотою і ється тим, що після електронного аретирування напрямком кінематично зв'язані, відповідно, з рогіростабілізатора через заданий інтервал часу петором датчика ДКВН 4 і ДКГН 5, статори яких кінеріодично вимірюють зміну величини сигналів датматично з'єднані з корпусом приціла, а виходи чиків кутового положення головного дзеркала за датчиків ДКВН 3 і ДКГН 4, відповідно, зв'язані з висотою (Dдквн) і напрямком (Dдкгн) та порівнюдругим і третім входом пристрою 5 компенсації ють ці значення із заданою пороговою величиною відхилення і першими входами комутаторів 9 і 10, (Dп), при цьому, якщо значення зміни сигналів датдругі входи яких підключені, відповідно, до виходів чиків Dдквн і Dдкгн більше значення Dп, то в канасуматорів 7 і 8, а виходи - до входів гіростабіліза 7 86155 8 но скоротити час, потрібний на вимір швидкості тора 1, причому другий і третій виходи пристрою. 5 відхилення лінії візування приціла. компенсації відхилення підключені до других вхоТак, наприклад, при мінімальній швидкості віддів суматора 7 і 8, перші входи яких підключені до хилення лінії візування не менше 1 т.д./хв. (3,4 виходів пульту 6 наведення, а четвертий вихід кут.сек/сек) і похибці виміру сигналів датчиків купристрою 5 компенсації відхилення підключено до тового положення не більше 10 кут.сек тривалість індикатора 11. інтервалу t1 буде складати не більше 7 секунд. Робота приціла з незалежною лінією прицілюПісля виміру значень кутового положення датвання із використанням заявленого способу авточиків ДКВН 3 і ДКГН 4 пристрій 5 компенсації відматичної компенсації відхилення лінії візування хилення формує компенсаційні сигнали каналів реалізується наступним чином. наведення за напрямком Uкг і висотою Uкв (див. Процес автоматичної компенсації відхилення починається з моменту надходження на перший Фіг.2, циклограма ¶). Так як після електронного вхід пристрою 5 компенсації відхилення (див. аретирування значення датчиків були рівні нулю, Фіг.1) імпульсного сигналу "Пуск" (див. Фіг.2, цикто швидкість відхилення лінії візування за висотою лограма а), по якому пристрій 5 компенсації відхиі напрямком пропорційна виміряним значенням лення формує імпульсний сигнал вмикання світдатчиків ДКВН 3 і ДКГН 4. Тому величини компенлового індикатора (див. Фіг.2, циклограма б), що сувальних сигналів Uкг і Uкв встановлюють пропопоступає з четвертого виходу на індикатор 11. рційно і в протифазі по відношенню до сигналів Вмикання індикатора 11 сигналізує про початок датчиків ДКВН 3 і ДКГН 4 (напрямком відхилення циклу компенсації відхилення, протягом якого лінії візування за висотою і напрямком). З другого і пульт 6 наведення повинен знаходитися в нейтратретього виходу пристрою 5 компенсації відхиленльному положенні. ня компенсувальні сигнали Uкг і Uкв, відповідно, Одночасно з цим з першого виходу пристрою 5 через суматори 7 і 8 та комутатори 9 і 10 поступакомпенсації відхилення на керуючі входи комутають на гіростабілізатор 1, змушуючи його виробити торів 8 і 9 поступає імпульсний сигнал "Аретир" збурювальні моменти, що протидіють відхиленню (див. Фіг.2, циклограма в), який забезпечує провелінії візування приціла. дення електронного аретирування гіростабілізатоДалі з метою підвищення точності компенсації ра 1. Електронне аретирування гіростабілізатора 1 відхилення, пристрій 5 компенсації відхилення призначене для установки датчиків ДКВН 3 і ДКГН періодично через інтервал часу t2 повторно вимі4 в нульове положення, в якому лінії візування рює значення датчиків ДКВН 3 і ДКГН 4. Потім обприціла (положення головного дзеркала 2) прийчислюється різниця сигналів датчиків ДКВН 3 і мають нульове (зааретироване) положення. Для ДКГН 4 попереднього і поточного кроку виміру цього вихідні сигнали датчиків ДКВН 3 і ДКГН 4 Dдквн і Dдкгн, які порівнюють із заданою порогочерез комутатори 9 і 10 поступають на моментні вою величиною (Dп) компенсації відхилення: При двигуни гіростабілізатора 1, забезпечуючи привецьому, якщо значення Dдквн і Dдкгн більше знадення головного дзеркала 2 в зааретироване почення Dп, то з періодом часу t2 змінюють компенложення, при цьому датчики ДКВН 3 і ДКВН 4 саційні сигнали Uкг і Uкв на величину кроку кванвстановлюються в нульове положення. Це дозвотування (див. Фіг.2, циклограма ¶) з урахуванням ляє врахувати вплив на відхилення лінії візування фази зміни сигналів датчиків ДКВН 3 і ДКГН 4, доприціла остаточних сигналів датчиків ДКВН 3 ти, поки значення Dдквн і Dдкгн не стануть менше ДКГН 4, викликаних похибкою первісної установки величини Dп (див. Фіг.2, циклограма г). і можливим збиванням датчиків в процесі експлуаПри досягненні обох значень Dдквн і Dдкгн метації. нше величини Dп пристрій 5 компенсації відхиленПісля зняття сигналу "Аретир" забезпечується ня формує сигнал "Стоп" (див. Фіг.2, циклограма підключення входів гіростабілізатора 1, відповідно, е), закінчує цикл компенсації відхилення лінії візучерез комутатори 9 і 10 та суматори 7 і 8 до входів вання і вимикає світловий індикатор 11. пульта 6 наведення. Під впливом остаточних сигПри цьому величина кроку квантування комналів каналів наведення лінії візування за висотою пенсаційних сигналів Uкг і Uкв повинна забезпечиUкер.вн і напрямком Uкер.гн, а також дрейфу гіроти зміну сигналу датчиків Dдквн і Dдкгн на величископів гіростабілізатора 1 відбувається відхилення ну, не більшу половини порогового значення Dп. лінії візування приціла. Це дозволяє забезпечити точність компенсації Через заданий час t1 пристрій 5 компенсації відхилення лінії візування приціла з похибкою вивідхилення здійснює вимір сигналів датчиків ДКВН міру сигналів датчиків ДКВН 3 і ДКГН 4, а також 3 і ДКГН 4 (див. Фіг.2, циклограма г), які поступавиключити вплив перешкод. ють, відповідно, на другий і третій вхід пристрою 5 В цьому випадку тривалість часу t3 компенсації компенсації відхилення. Тривалість інтервалу t1 відхилення (див. Фіг.2, циклограма ¶) є перемінною визначається мінімальною величиною швидкості величиною і визначається величиною швидкості відхилення лінії візування приціла, що підлягає відхилення лінії візування приціла і апаратною компенсації, а також точністю виміру сигналів датреалізацією пристрою 5 компенсації відхилення, чиків ДКВН 3 і ДКГН 4. При цьому кутове зміщення що дозволяє мінімізувати тривалість процесу комлінії візування протягом інтервалу t1 при мінімальпенсації відхилення. ній швидкості відхилення повинно бути не менше, ніж в 2 рази більше точності виміру датчиків кутового положення лінії візування, що дозволяє знач 9 Комп’ютерна верстка В. Мацело 86155 Підписне 10 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automated compensation of deflection of line of sight aiming
Автори англійськоюKhomchenko Oleksii Yakovych, Hordienko Valentyn Ivanovych, Reviakin Leonid Dmytrovych
Назва патенту російськоюСпособ автоматической компенсации отклонения линии визирования прицела
Автори російськоюХомченко Алексей Яковлевич, Гордиенко Валентин Иванович, Ревякин Леонид Дмитриевич
МПК / Мітки
МПК: F41G 3/02
Мітки: прицілу, автоматичної, лінії, відхілення, компенсації, спосіб, візування
Код посилання
<a href="https://ua.patents.su/5-86155-sposib-avtomatichno-kompensaci-vidkhilennya-lini-vizuvannya-pricilu.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичної компенсації відхилення лінії візування прицілу</a>
Спосіб автоматичної компенсації відхилення лінії візування прицілу гармати бронемашини і пристрій для його здійснення
Номер патенту: 49958
Опубліковано: 15.10.2002
Автори: Гордієнко Валентин Іванович, Ревякин Леонід Дмитрович, Глущенко Анатолій Романович, Фролов Леонід Андрійович, Хомченко Олексій Якович
МПК: F41G 3/02
Мітки: відхілення, прицілу, візування, гармати, компенсації, автоматичної, пристрій, спосіб, здійснення, бронемашини, лінії
Формула / Реферат:
1. Спосіб автоматичної компенсації відхилення лінії візування прицілу гармати бронемашини, який полягає в тому, що в канали наведення прицілу за висотою та напрямком вводять компенсаційні сигнали, пропорційні відхиленню лінії візування за висотою та напрямком, в протифазі по відношенню до напрямку руху відхилення, який відрізняється тим, що гармату приводять на певний кут і фіксують її положення на жорсткій опорі, вимикають приводи гармати та...
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30200
Опубліковано: 15.05.2003
Автори: Беляєва Галина Григорівна, Плита Олександр Андрійович, Черняк Сергій Іванович
МПК: G02B 23/00
Мітки: системою, спосіб, кутів, визначення, нашоломною, візування
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі осі візира, встановленого на рухомій основі, наприклад на шоломі оператора, при суміщенні перехрестя візира з ціллю, який відрізняється тим, що вимірюють величини швидкості кутового повороту відносно трьох взаємно перпендикулярних осей рухомої основи, а кути вертикального
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30191
Опубліковано: 15.11.2000
Автори: Беляєва Галина Григорівна, Бузанов Віктор Іванович, Плита Олександр Андрійович, Черняк Сергій Іванович
МПК: G02B 23/00
Мітки: нашоломною, кутів, системою, визначення, спосіб, візування
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі вісі візиру, встановленного на рухомій основі, при суміщенні перехрестя візиру з ціллю, який відрізняється тим, що додатково вимірюють параметри кутового розвороту відносно двох взаємноперпендикулярних вісей рухомої основи, суміщують контрольні та стабілізовані мітки у полі зору візиру, а кути азимутального jу та...
Спосіб візування
Номер патенту: 58746
Опубліковано: 15.08.2003
Автори: Москаленко Михайло Андрійович, Потапова Галина Костянтинівна
МПК: G01C 3/00, B64D 45/00
Формула / Реферат:
1. Спосіб візування, який полягає у тому, що напрямок візування сполучають із точкою візування, який відрізняється тим, що додатково формують допоміжний напрямок візування і сполучають його з видимим зображенням точки візування.2. Спосіб візування по п. 1, який відрізняється тим, що допоміжний напрямок візування формують як напрямок на видиме зображення точки, заданої напрямком візування і відстанню до об'єкта візування.3....
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30187
Опубліковано: 15.11.2000
Автори: Плита Олександр Андрійович, Черняк Сергій Іванович, Беляєва Галина Григорівна
МПК: G02B 23/00
Мітки: візування, системою, кутів, спосіб, нашоломною, визначення
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає в визначенні кутових координат орієнтації в просторі вісі візиру, установленого на рухомій основі, та суміщенні перехрестя візиру з ціллю, який відрізняється тим, що вимірюють величину швидкості кутового розвороту рухомої основи відносно вертикальної вісі базової системи координат, суміщують контрольні та стабілізовані мітки в полі зору візиру, а координати...
Попередній патент: Спосіб відновлення тиглів з коштовних металів, зокрема з іридію
Наступний патент: Спосіб виготовлення підкладок із монокристала сапфіра
Випадковий патент: Виробництво електроенергії за допомогою гіроплана, пристрій та спосіб керування