Спосіб протидії активним поляризаційним перешкодам, що наводяться
Номер патенту: 86626
Опубліковано: 10.01.2014
Автори: Водчиць Олександр Григорович, АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ, Конотопець Микола Миколайович, Столінець Сергій Леонідович, Власко Олександр Миколайович, Чекед Ігор Володимирович, Чупахін Сергій Анатолійович, Кремешний Олександр Іванович, Манішин Олександр Вікторович, Добровольський Юзеф Броніславович, Бойко Руслан Васильович, Іванов Володимир Львович, Семененко Олег Михайлович
Формула / Реферат
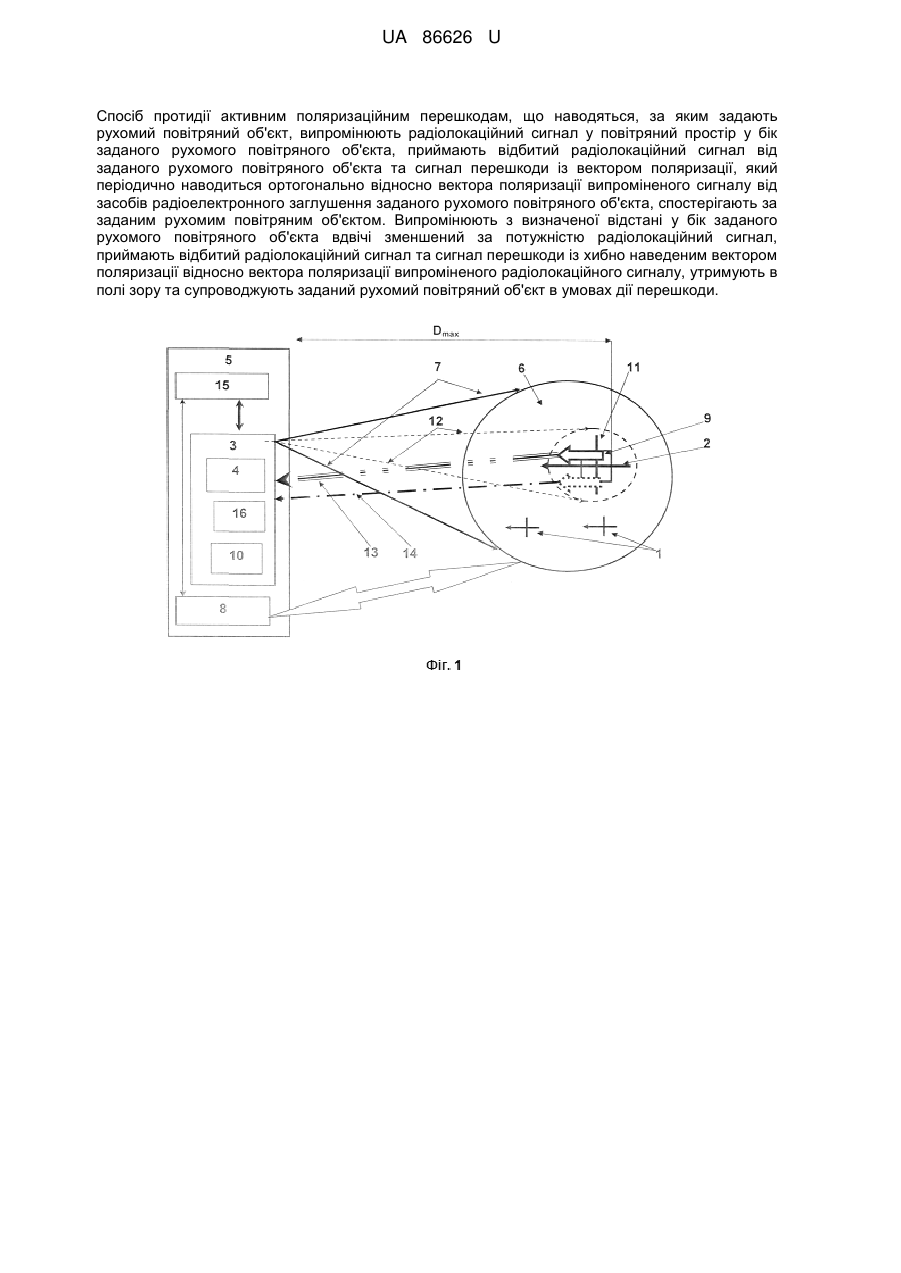
Спосіб протидії активним поляризаційним перешкодам, що наводяться, за яким задають рухомий повітряний об'єкт, випромінюють радіолокаційний сигнал у повітряний простір у бік заданого рухомого повітряного об'єкта, приймають відбитий радіолокаційний сигнал від заданого рухомого повітряного об'єкта та сигнал перешкоди із вектором поляризації, який періодично наводиться ортогонально відносно вектора поляризації випроміненого сигналу від засобів радіоелектронного заглушення заданого рухомого повітряного об'єкта, спостерігають за заданим рухомим повітряним об'єктом, який відрізняється тим, що випромінюють з визначеної відстані у бік заданого рухомого повітряного об'єкта вдвічі зменшений за потужністю радіолокаційний сигнал, приймають відбитий радіолокаційний сигнал та сигнал перешкоди із хибно наведеним вектором поляризації відносно вектора поляризації випроміненого радіолокаційного сигналу, утримують в полі зору та супроводжують заданий рухомий повітряний об'єкт в умовах дії перешкоди.
Текст
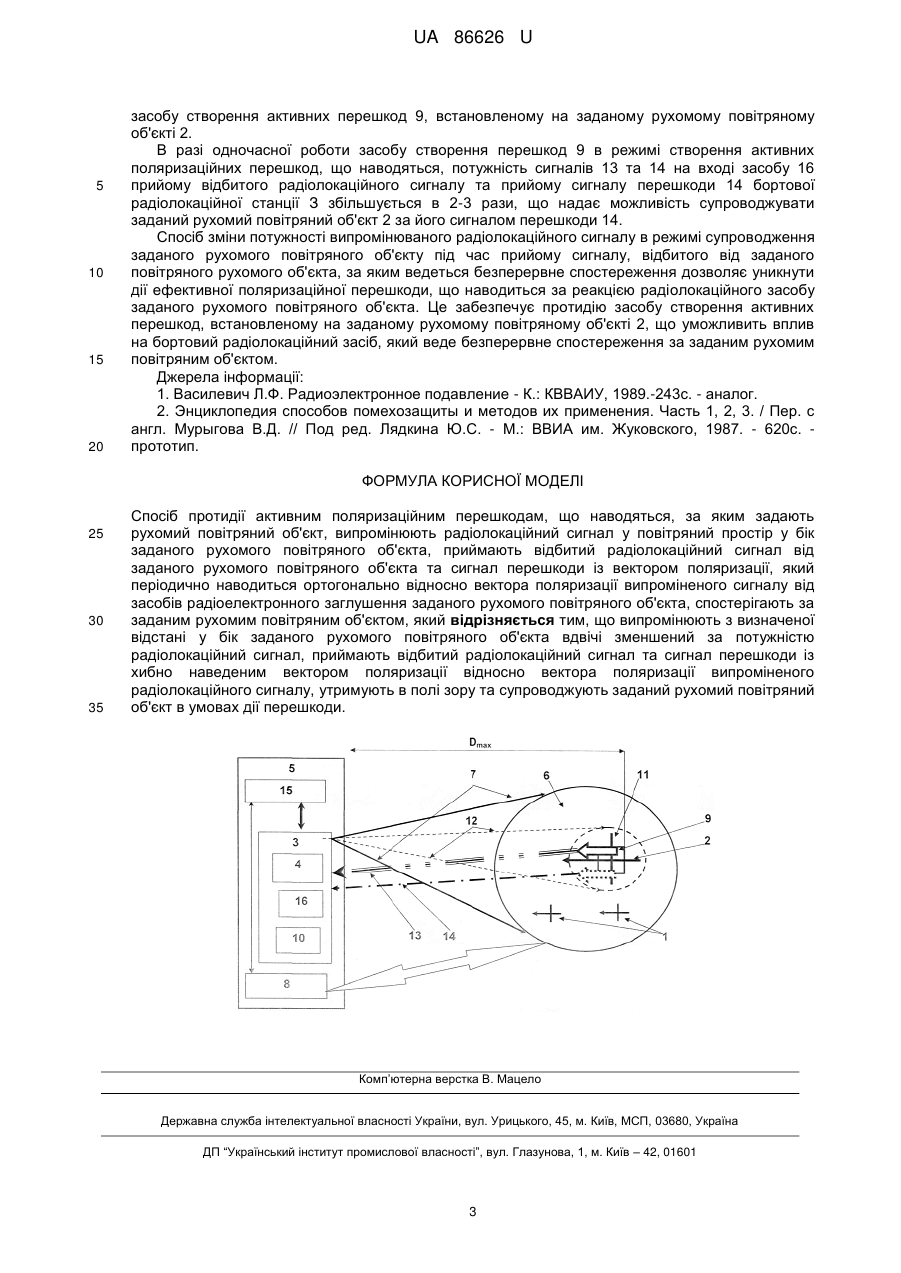
Реферат: UA 86626 U (12) UA 86626 U Спосіб протидії активним поляризаційним перешкодам, що наводяться, за яким задають рухомий повітряний об'єкт, випромінюють радіолокаційний сигнал у повітряний простір у бік заданого рухомого повітряного об'єкта, приймають відбитий радіолокаційний сигнал від заданого рухомого повітряного об'єкта та сигнал перешкоди із вектором поляризації, який періодично наводиться ортогонально відносно вектора поляризації випроміненого сигналу від засобів радіоелектронного заглушення заданого рухомого повітряного об'єкта, спостерігають за заданим рухомим повітряним об'єктом. Випромінюють з визначеної відстані у бік заданого рухомого повітряного об'єкта вдвічі зменшений за потужністю радіолокаційний сигнал, приймають відбитий радіолокаційний сигнал та сигнал перешкоди із хибно наведеним вектором поляризації відносно вектора поляризації випроміненого радіолокаційного сигналу, утримують в полі зору та супроводжують заданий рухомий повітряний об'єкт в умовах дії перешкоди. UA 86626 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до радіолокації, а саме до способів протидії активним поляризаційним перешкодам, що наводяться. Спосіб протидії активним поляризаційним перешкодам, що наводяться за площиною поляризації, доцільно застосовувати під час польотів на рухомих повітряних засобах в особливих умовах з метою протидії активним поляризаційним перешкодам. Відомий спосіб протидії сигналу поляризаційної перешкоди, яка наводиться за площиною поляризації, за яким відбувається періодична зміна площини поляризації випромінюваного радіолокаційного сигналу на заданому рухомому повітряному об'єкті, приймають відбитий радіолокаційний сигнал від іншого заданого повітряного об'єкта та сигнал поляризаційної перешкоди, що наводиться, після збігання площини поляризації випромінюваного радіолокаційного сигналу і поляризаційної перешкоди відбувається зрив супроводження іншого повітряного рухомого об'єкта, змінюється площина поляризації радіолокаційного сигналу та наводиться радіолокаційна станція на інший повітряний рухомий об'єкт, уникають тимчасової дії поляризаційної перешкоди на зафіксованій площині поляризації до наступного її наведення (1, 2). Недоліками відомого способу протидії сигналу поляризаційної перешкоди, що наводиться, є те, що процес вірного наведення поляризації перешкоди ортоганольно поляризації радіолокаційного сигналу з меншою періодичністю, але все ж відбувається, внаслідок чого поляризаційна перешкода зриває процес супроводження, що вимагає поновлення процесу пошуку та наведення на інший повітряний рухомий об'єкт з метою його подальшого супроводження. Найбільш близьким технологічним рішенням, як за суттю, так і за задачами, що вирішуються, яке вибране за найближчий аналог (прототип), є спосіб протидії активним поляризаційним перешкодам, що наводяться, за яким задають рухомий повітряний об'єкт, випромінюють радіолокаційний сигнал у повітряний простір у бік заданого рухомого повітряного об'єкта, приймають відбитий радіолокаційний сигнал від заданого рухомого повітряного об'єкта та сигнал перешкоди із вектором поляризації, який періодично наводиться ортогонально відносно вектора поляризації випроміненого сигналу від засобів радіоелектронного подавлення заданого рухомого повітряного об'єкта, спостерігають за заданим рухомим повітряним об'єктом, (2). Недоліками відомого способу протидії активним поляризаційним перешкодам, що наводять, який вибрано за найближчий аналог (прототип), є те, що спосіб не забезпечує повного уникнення дії перешкоди, а лише забезпечує зменшення часу її дії та збільшення періоду спостереження за заданим рухомим повітряним об'єктом. Під час реалізації способу процесу спостереження зривається, а час безперервного спостереження за заданим рухомим повітряним об'єктом зменшується. В основу корисної моделі поставлено задачу за рахунок змінювання та впровадження додаткових технологічних операцій періодично зменшувати в два рази потужність випроміненого радіолокаційного сигналу з заданої відстані до заданого рухомого повітряного об'єкта. Завдяки цьому засіб перешкод заданого рухомого повітряного об'єкту помилково вибирає площину поляризації для створення поляризаційної перешкоди. Це підвищує ефективність супроводження заданого рухомого повітряного об'єкту в умовах створення ним поляризаційної перешкоди, що наводиться, та надає можливість супроводження заданого рухомого повітряного об'єкта за сигналом перешкоди. Поставлена задача вирішується тим, що в способі протидії активним поляризаційним перешкодам, що наводяться за площиною поляризації, за яким задають рухомий повітряний об'єкт, випромінюють радіолокаційний сигнал у повітряний простір у бік заданого рухомого повітряного об'єкта, приймають відбитий радіолокаційний сигнал від заданого рухомого повітряного об'єкта та сигнал перешкоди із вектором поляризації, який періодично наводиться ортогонально відносно вектора поляризації випроміненого сигналу від засобів радіоелектронного заглушення заданого рухомого повітряного об'єкта, спостерігають за заданим рухомим повітряним об'єктом, згідно з корисною моделлю, випромінюють визначеної відстані у бік заданого рухомого повітряного об'єкта вдвічі зменшений за потужністю радіолокаційний сигнал, приймають відбитий радіолокаційний сигнал та сигнал перешкоди із хибно наведеним вектором поляризації відносно вектора поляризації випроміненого радіолокаційного сигналу, утримують в полі зору та супроводжують заданий рухомий повітряний об'єкт в умовах дії перешкоди. Додаткове зменшення в два рази потужності радіолокаційного сигналу відбувається за допомогою застосування додаткового цифрового пристрою управління потужністю випромінюваного радіолокаційним сигналом. Зменшення потужності радіолокаційного сигналу, 1 UA 86626 U . 5 10 15 20 25 30 35 40 45 50 55 що випромінюється, може відбуватися з відстані не більше D=0,84 Dmax (Dmах - максимальна дальність супроводження повітряного об'єкта радіолокаційною станцією). Це забезпечує фіксацію площини поляризації засобом створення поляризаційної перешкоди заданого повітряного об'єкту в момент зміни потужності випромінюваного радіолокаційного сигналу. Внаслідок цього поляризаційна перешкода буде створюватися на хибно визначеній площині поляризації та не буде загрожувати роботі радіолокаційної станції. Тому, підвищується ефективність безперервного супроводження заданого рухомого повітряного об'єкту в умовах дії поляризаційної перешкоди та створюється можливість супроводження заданого рухомого повітряного об'єкта за сигналом перешкоди. Послідовність виконання технологічних операцій, які становлять суть способу протидії активним поляризаційним перешкодам, які наводяться, показано на кресленні. Спосіб протидії активним поляризаційним перешкодам, які наводяться, ґрунтується на зменшенні в два рази потужності випромінювання радіолокаційного сигналу в процесі супроводження заданого рухомого повітряного об'єкту реалізується наступним чином (див. креслення). Для виявлення одного із рухомих повітряних об'єктів 1 і 2 за допомогою бортового радіолокаційного засобу 3 рухомого повітряного засобу 5 з встановленим пристроєм зміни площини поляризації 4 для захисту від активних поляризаційних перешкод, що наводяться, який встановлено на бортовому радіолокаційному засобу 3 рухомого повітряного засобу 5, в повітряний простір 6 радіолокаційний сигнал 7, показаний на кресленні одинарними суцільними стрілками (лініями). За допомогою засобу візуального спостереження 8 візуально визначають рухомі повітряні об'єкти 1 і 2. За допомогою засобу 10 ручного (автоматичного) фокусування радіолокаційного сигналу серед рухомих повітряних об'єктів 1 або 2 вибирають, наприклад, рухомий повітряний об'єкт 2 з засобом 9 створення активних поляризаційних перешкод, які наводяться ортогонально відносно площини поляризації радіолокаційного сигналу повітряного засобу 5 рухомого повітряного об'єкту 2. Тобто, на рухомий повітряний об'єкт 2 випромінюється безперервний сфокусований радіолокаційний сигнал 12 спостереження за ним (позначений переривчастою лінією (стрілкою) з крапкою) та задають рухомий повітряний об'єкт 2, на якому . діє засіб 9 створення активних перешкод. Із дальності не більше D = 0,84 Dmax (Dmax максимальна дальність супроводження повітряного об'єкта радіолокаційною станцією) від рухомого повітряного засобу 5 до рухомого повітряного об'єкта 2 за допомогою додатково встановленого цифрового пристрою 15 управління потужності випромінювання радіолокаційного засобу 3 рухомого повітряного засобу 5 випромінюють зменшений у два рази за потужністю радіолокаційний сигнал у звужений простір супроводження 11 рухомого повітряного об'єкта 2. Внаслідок чого приймальний пристрій засобу 9 створення перешкод рухомого повітряного об'єкта 2 фіксує наведення на площину поляризації випромінюваного радіолокаційного сигналу 12 та створює сигнал перешкоди 14 (який позначено одинарною переривчастою лінією (стрілкою) на хибно вибраній площині поляризації. Бортовий радіолокаційний засіб 3 рухомого повітряного засобу 5 автоматично приймає відбитий радіолокаційний сигнал 13 (позначений подвійною переривчастою лінією (стрілкою) з двома крапками), також одночасно він буде приймати сигнал 14 поляризаційної перешкоди, яка наводиться, від засобу створення активних перешкод 9 заданого рухомого повітряного об'єкту 2. Під час функціонування засобу 15 зміни потужності радіолокаційного сигналу, що випромінюється у звужений простір супроводження 11 рухомого повітряного об'єкта 2, прийом сигналу поляризаційної перешкоди 14 не впливає на відбитий радіолокаційний сигнал 13, тому що поляризації сигналів 13 та 14 не будуть ортогональними. За такої зміни потужності випромінювання радіолокаційного сигналу супроводження 12 є обмеження по дальності застосування запропонованого способу 0,84 від максимальної дальності Dmах роботи пристрою 3 рухомого повітряного об'єкта 2, але поляризаційна перешкода 14, що наводиться, з цієї дальності Dmax не зриває супроводження за заданим повітряним об'єктом 2 та додатково виникає можливість роботи бортового радіолокаційного засобу 3 за сигналом перешкоди (постановник перешкод - заданий рухомий повітряний об'єкт 2 з засобом створення активних поляризаційних перешкод 9, що наводяться, буде себе "підсвічувати"). Із дальності 0,84 від максимальної дальності Dmах роботи бортового радіолокаційного засобу 3 рухомого повітряного засобу 5, ймовірність зриву супроводження поляризаційною перешкодою, що наводиться знижується до нульових значень, поляризаційна перешкода 14 не спроможна змінити роботу бортової радіолокаційної станції 3, чим протидіють 2 UA 86626 U 5 10 15 20 засобу створення активних перешкод 9, встановленому на заданому рухомому повітряному об'єкті 2. В разі одночасної роботи засобу створення перешкод 9 в режимі створення активних поляризаційних перешкод, що наводяться, потужність сигналів 13 та 14 на вході засобу 16 прийому відбитого радіолокаційного сигналу та прийому сигналу перешкоди 14 бортової радіолокаційної станції З збільшується в 2-3 рази, що надає можливість супроводжувати заданий рухомий повітряний об'єкт 2 за його сигналом перешкоди 14. Спосіб зміни потужності випромінюваного радіолокаційного сигналу в режимі супроводження заданого рухомого повітряного об'єкту під час прийому сигналу, відбитого від заданого повітряного рухомого об'єкта, за яким ведеться безперервне спостереження дозволяє уникнути дії ефективної поляризаційної перешкоди, що наводиться за реакцією радіолокаційного засобу заданого рухомого повітряного об'єкта. Це забезпечує протидію засобу створення активних перешкод, встановленому на заданому рухомому повітряному об'єкті 2, що уможливить вплив на бортовий радіолокаційний засіб, який веде безперервне спостереження за заданим рухомим повітряним об'єктом. Джерела інформації: 1. Василевич Л.Ф. Радиоэлектронное подавление - К.: КВВАИУ, 1989.-243с. - аналог. 2. Энциклопедия способов помехозащиты и методов их применения. Часть 1, 2, 3. / Пер. с англ. Мурыгова В.Д. // Под ред. Лядкина Ю.С. - М.: ВВИА им. Жуковского, 1987. - 620с. прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 Спосіб протидії активним поляризаційним перешкодам, що наводяться, за яким задають рухомий повітряний об'єкт, випромінюють радіолокаційний сигнал у повітряний простір у бік заданого рухомого повітряного об'єкта, приймають відбитий радіолокаційний сигнал від заданого рухомого повітряного об'єкта та сигнал перешкоди із вектором поляризації, який періодично наводиться ортогонально відносно вектора поляризації випроміненого сигналу від засобів радіоелектронного заглушення заданого рухомого повітряного об'єкта, спостерігають за заданим рухомим повітряним об'єктом, який відрізняється тим, що випромінюють з визначеної відстані у бік заданого рухомого повітряного об'єкта вдвічі зменшений за потужністю радіолокаційний сигнал, приймають відбитий радіолокаційний сигнал та сигнал перешкоди із хибно наведеним вектором поляризації відносно вектора поляризації випроміненого радіолокаційного сигналу, утримують в полі зору та супроводжують заданий рухомий повітряний об'єкт в умовах дії перешкоди. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюSemenenko Oleh Mykhailovych, Andrievskyi Andrii Petrovych, Vodchyts Oleksandr Hryhorovych, Cheked Ihor Volodymyrovych
Автори російськоюСемененко Олег Михайлович, Андриевский Андрей Петрович, Водчиц Александр Григорьевич, Чекед Игорь Владимирович
МПК / Мітки
МПК: G01S 7/537
Мітки: спосіб, наводяться, протидії, перешкодам, поляризаційним, активним
Код посилання
<a href="https://ua.patents.su/5-86626-sposib-protidi-aktivnim-polyarizacijjnim-pereshkodam-shho-navodyatsya.html" target="_blank" rel="follow" title="База патентів України">Спосіб протидії активним поляризаційним перешкодам, що наводяться</a>
Спосіб протидії активним поляризаційним перешкодам на фіксованій площині поляризації
Номер патенту: 79603
Опубліковано: 25.04.2013
Автори: АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ, Семененко Олег Михайлович, Манішин Олександр Вікторович, Іванов Володимир Львович, Чекед Ігор Володимирович, Потапов Григорій Михайлович, Добровольський Юзеф Броніславович, Водчиць Олександр Григорович, Власко Микола Петрович
МПК: G01S 7/537
Мітки: поляризації, площині, активним, перешкодам, протидії, фіксованій, поляризаційним, спосіб
Формула / Реферат:
Спосіб протидії активним поляризаційним перешкодам на фіксованій площині поляризації, за яким задають рухомий повітряний об'єкт, випромінюють радіолокаційний сигнал у повітряний простір в бік заданого рухомого повітряного об'єкта, приймають відбитий радіолокаційний сигнал від заданого рухомого повітряного об'єкта, спостерігають за заданим рухомим повітряним об'єктом, який відрізняється тим, що від заданого рухомого повітряного об'єкта...
Спосіб подачі радіолокаційних сигналів протидії активним перешкодам
Номер патенту: 72365
Опубліковано: 10.08.2012
Автори: Водчиць Олександр Григорович, АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ, Семененко Олег Михайлович, Соломатін Дмитро Олександрович, Власко Олександр Миколайович, Добровольський Юзеф Броніславович, Чекед Ігор Володимирович
МПК: G01S 7/537
Мітки: перешкодам, активним, сигналів, спосіб, подачі, протидії, радіолокаційних
Формула / Реферат:
Спосіб подачі радіолокаційних сигналів протидії активним перешкодам, за яким випромінюють радіолокаційний сигнал в повітряний простір, виявляють інші рухомі повітряні об'єкти, визначають інші задані рухомі повітряні об'єкти, визначають відстань до іншого заданого рухомого повітряного об'єкта з засобом створення активних перешкод та швидкість його руху залежно від заданого кутового розміру направлення проміння радіолокаційного сигналу,...
Дуплексний волоконно-оптичний підсилювач з поляризаційним розділенням підсилених сигналів
Номер патенту: 97775
Опубліковано: 12.03.2012
Автор: Макаров Терентій Варфоломієвич
МПК: H01S 3/067
Мітки: сигналів, розділенням, підсилювач, підсилених, дуплексний, волоконно-оптичний, поляризаційним
Формула / Реферат:
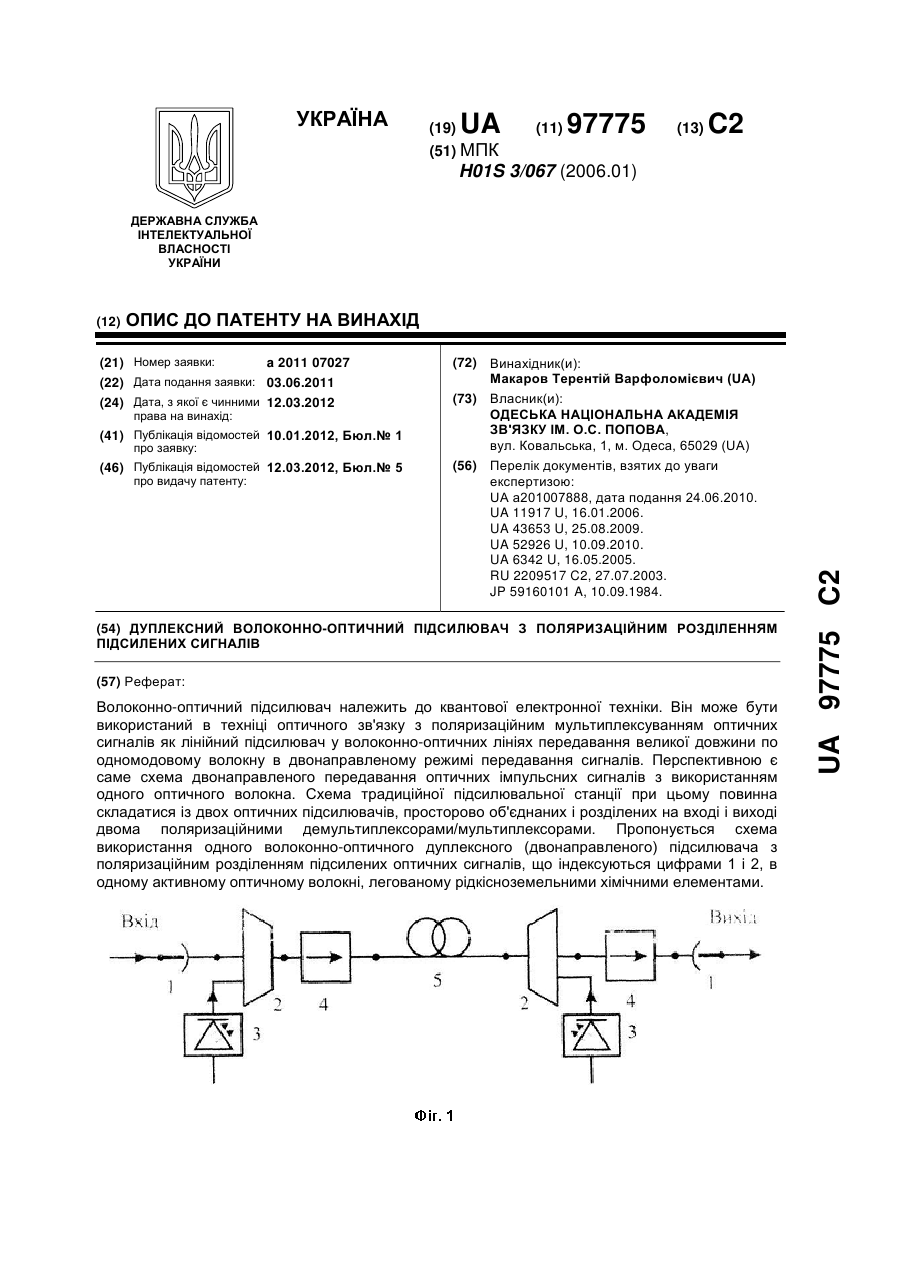
Дуплексний волоконно-оптичний підсилювач з поляризаційним розділенням підсилених сигналів, що містить вхідні рознімні оптичні з'єднувачі, двохвильові оптичні мультиплексори, лазери накачування, активне оптичне волокно, леговане рідкісноземельними хімічними елементами, атоми яких збуджуються полями лазерів накачування, який відрізняється тим, що одне активне оптичне волокно укладене по спіральній лінії на тор із співвідношенням в межах
Спосіб виготовлення скла зі зносостійким активним фотокаталітичним покриттям, спосіб виготовлення підкладки з фотокаталітичним активним покриттям, виріб, скло зі зносостійким активним фотокаталітичним покриттям
Номер патенту: 74550
Опубліковано: 16.01.2006
Автори: Аммерлан Джоханнес Андреас Марія, Херст Саймон Джеймз, Маккарді Річард Джозеф
МПК: C03C 17/34, C03C 17/23, C23C 16/40
Мітки: спосіб, фотокаталітичним, підкладки, покриттям, активним, зносостійким, виріб, скла, скло, виготовлення
Формула / Реферат:
1. Спосіб виготовлення скла зі зносостійким активним фотокаталітичним покриттям, який відрізняється тим, що включає осадження на поверхню скляної підкладки активного фотокаталітичного титаноксидного шару товщиною, меншою ніж 40 нм шляхом приведення поверхні підкладки, що має температуру в діапазоні 645-720°С, в зіткнення з текучою сумішшю, яка містить джерело титану.2. Спосіб за п.1, який відрізняється тим, що підкладка має температуру...
Пристрій для ефективної протидії горизонтальному потоку урагану
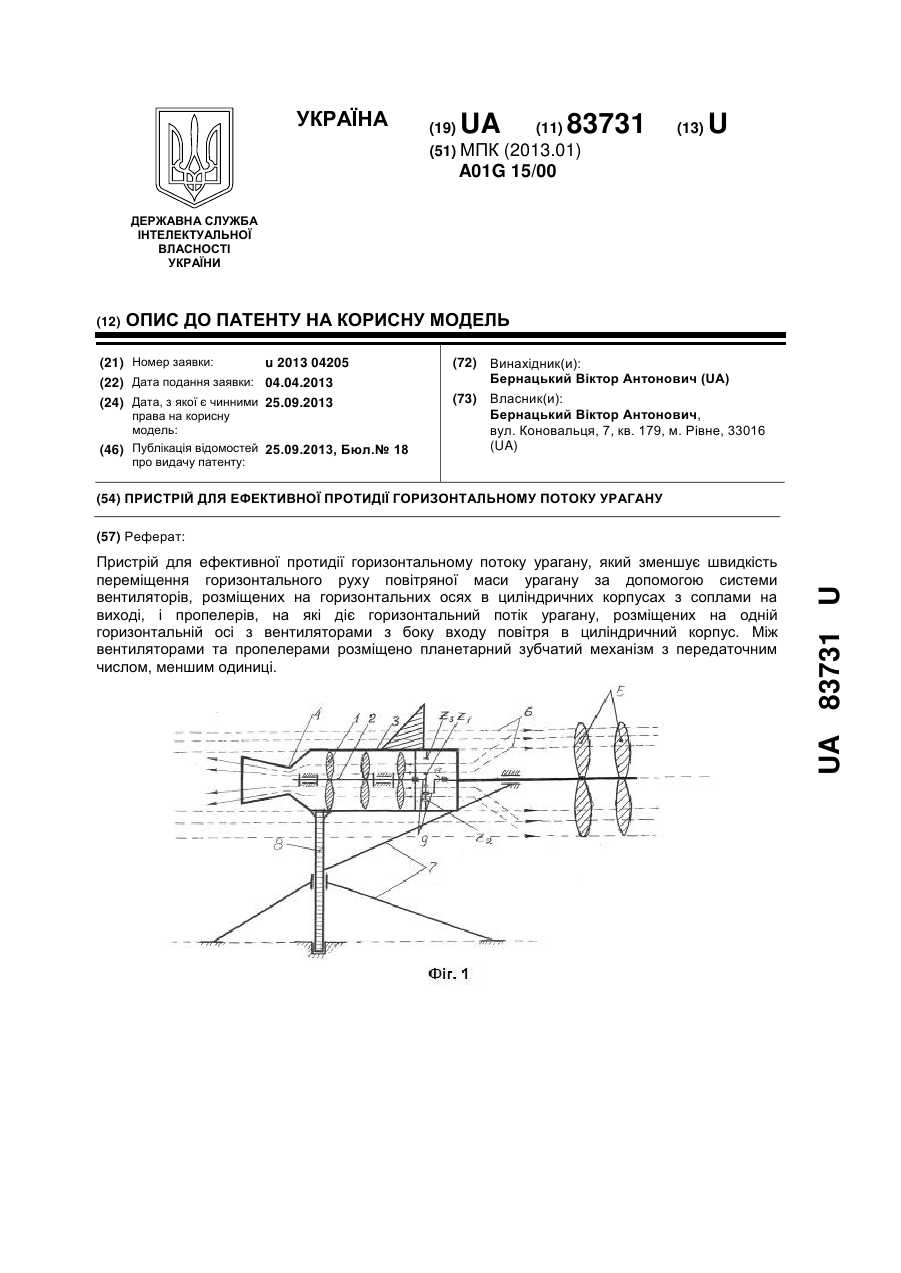
Номер патенту: 83731
Опубліковано: 25.09.2013
Автор: Бернацький Віктор Антонович
МПК: A01G 15/00
Мітки: горизонтальному, потоку, протидії, ефективно, урагану, пристрій
Формула / Реферат:
1. Пристрій для ефективної протидії горизонтальному потоку урагану, який зменшує швидкість переміщення горизонтального руху повітряної маси урагану за допомогою системи вентиляторів, розміщених на горизонтальних осях в циліндричних корпусах з соплами на виході, і пропелерів, на які діє горизонтальний потік урагану, розміщених на одній горизонтальній осі з вентиляторами з боку входу повітря в циліндричний корпус, який відрізняється тим, що...
Попередній патент: Обладнання для запобігання забиванню каналізаційних мереж
Наступний патент: Реабілітуюче середовище для кріоконсервованих лейкоцитів донорської крові
Випадковий патент: Модульний комплекс для переробки гумових відходів, відпрацьованих автошин, пет-пляшок, полімерних тканин, поролону в альтернативні види палива