Механізм кардіоїдографа
Номер патенту: 86700
Опубліковано: 10.01.2014
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович





Формула / Реферат
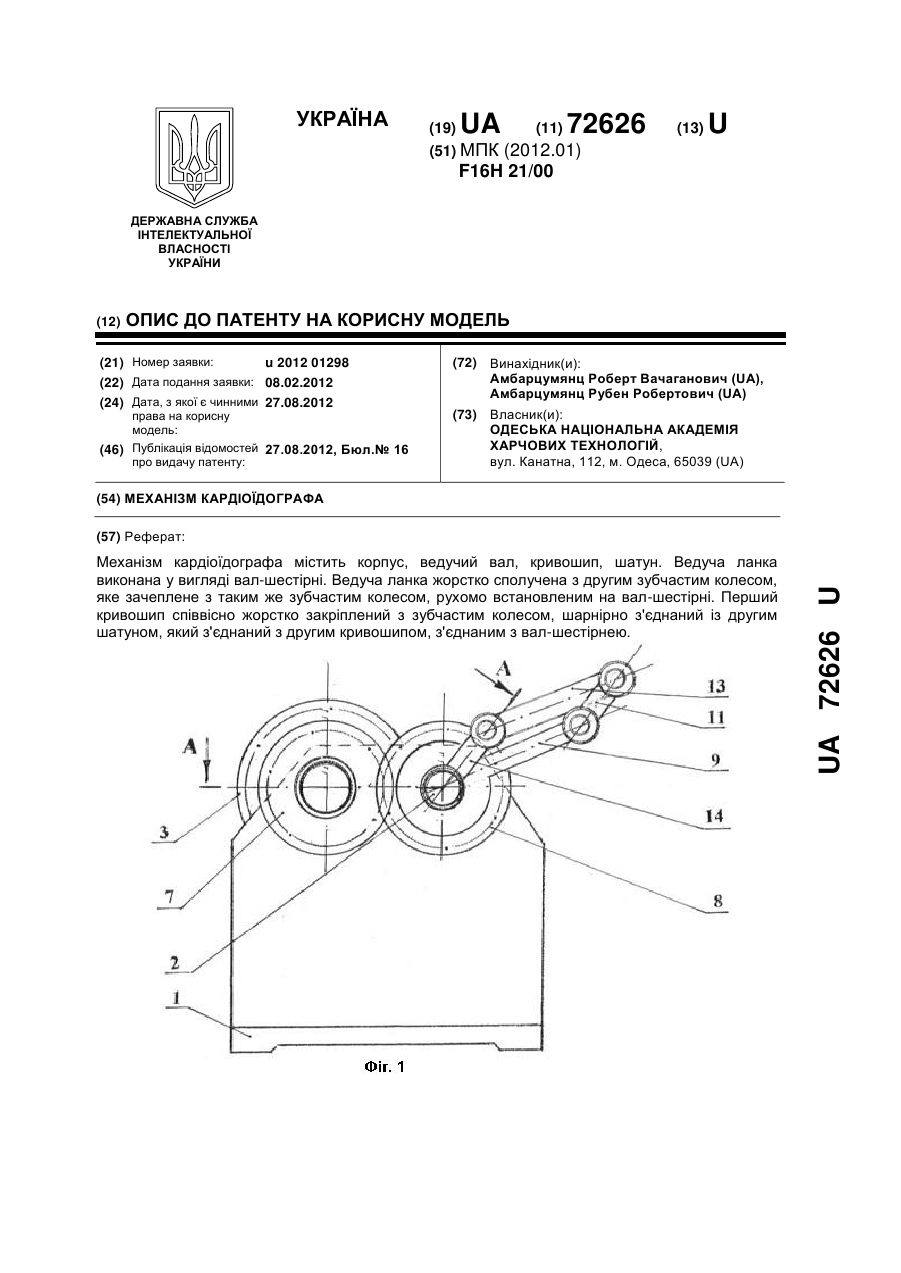
Механізм кардіоїдографа, який складається із корпусу, ведучого вала, кривошипів, шатунів, зубчастих коліс, який відрізняється тим, що з корпусом нерухомо з'єднана перша зірочка і вона утворює обертальну кінематичну пару з ведучим валом, на якому жорстко закріплений одним кінцем кривошип, на другому кінці кривошипа жорстко закріплений палець, на якому рухомо встановлено перше зубчасте колесо, а з першим зубчастим колесом жорстко закріплений важіль, таким чином, що його продовжна вісь проходить через центр обертання першого зубчастого колеса, на продовжній осі на відстані, рівній дві довжини кривошипа, закріплений конічний палець, перше зубчасте колесо, в свою чергу, зачеплене з другим зубчастим колесом з передаточним відношенням між ними "два" з негативною ознакою, друге зубчате колесо нерухомо встановлено на валик, який утворює обертальну кінематичну пару з кривошипом, на другому кінці валика нерухомо встановлена друга зірочка, яка зачеплена з ланцюгом, який, в свою чергу, зачеплений з першою зірочкою, передаточне відношення між зірочками дорівнює "одиниця" з позитивною ознакою.
Текст
Реферат: UA 86700 U UA 86700 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до машинобудування та приладобудування. Відомі конструкції механізму кардіоїдографа, що містить прямокутний шатун, який сполучений поступальними кінематичними парами з двома повзунами, які, в свою чергу, з'єднані з корпусом за допомогою обертальних кінематичних пар (И.И. Артоболевский, Н.И. Левитский, С.А. Черкудинов. Синтез плоских механизмов. М.: физ.-мат лит.,1959. - С. 308, рис. 409). Однак цей механізм має ряд недоліків: неможливість описувати криву кардіоїди на всьому протязі; наявність двох поступальних кінематичних пар, що збільшує енерговитрати при виконані корисної роботи; погані умови передачі сил від повзуна до шатуна, якщо повзун є ведучий; якщо шатун ведучий також погані умови передачі сил веденому повзуну. Відома друга конструкція механізму кардіоїдографа на основі кривошипно-кулісного механізму (А.Ф. Крайнев. Словарь - справочник по механизмам. 2-изд. перераб. и доп. - М.:, Машиностроение, 1987. - С. 170, рис. б). Механізм містить кривошип, шатун, точка продовжної осі якого описує криву кардіоїда, повзун, який поступально з'єднаний з шатуном та одночасно з обертальною парою з корпусом механізму. Довжина кривошипа дорівняє довжині між центрами кривошипа і повзуна. Цей механізм також має ряд недоліків: наявність мертвого положення, коли центр обертальної кінематичної пари кривошип-шатун знаходиться на центрі обертальної кінематичної пари шатун-повзун; неможливість описувати криву кардіоїди на всьому її протязі ізза наявності мертвого положення; наявність поступальної кінематичної пари, що значно збільшує енерговитрати при виконані корисної роботи, а також зменшує точність відтворювання кривої кардіоїди, невизначеність руху шатуна у мертвому положенні механізму, що може порушувати його функціонування. Найбільш близьким технічним рішенням є двокривошипний зубчасто-важільний механізм кардіоїдографа (корисна модель № 72626 "Механізм кардіоїдографа". - Бюл. № 16, від 27.08.2012 р.). Механізм містить по два кривошипа і шатуна та зубчасті колеса. Механізм працює таким чином. Обертальний рух від зовні передається першому кривошипу і від нього через двоступінчату зубчасту передачу з передаточним відношенням "два" з позитивною ознакою другому кривошипу. Від першого кривошипа рух передається одному із шатунів, а другого кривошипа - другому шатуну. Центр шарнірного з'єднання двох шатунів відтворюватиме криву кардіоїду. Однак, конструкція описаного механізму має ряд недоліків: 1. Багатоланковість та складність конструкції, що знижує надійність та довговічність роботи. 2. Погані умови передачі зусиль, коли кривошипи і з'єднані з ними шатуни утворюють одну лінію. 3. Наявність двоступінчатої зубчастої передачі, що значно знижує точність відтворювання кривої кардіоїди. Найближчий аналог і корисна модель, що заявляється, мають такі спільні ознаки: корпус, ведучий вал, кривошип, шатун, зубчасті колеса. В основу корисної моделі поставлено задачу розробити конструкцію механізму кардіоїдографа, у якому за рахунок зміни конструктивних елементів досягається зменшення гілок ланок, спрощення конструкції і тим самим підвищення точності відтворювання кривої кардіоїди та надійності і довговічності роботи. Поставлена задача вирішена в конструкції багатоланкового зубчасто-важільного механізму кардіоїдографа, що містить корпус, ведучий вал, кривошипи, шатуни, зубчасті колеса, тим, що з корпусом нерухомо з'єднана перша зірочка і вона утворює обертальну кінематичну пару з ведучим валом, на якому жорстко закріплений одним кінцем кривошип, на другому кінці кривошипа жорстко закріплений палець, на якому рухомо встановлено перше зубчасте колесо, а з першим зубчастим колесом жорстко закріплений важіль, таким чином, що його продовжна вісь проходить через центр обертання першого зубчастого колеса, на продовжній осі на відстані, рівній дві довжини кривошипа, закріплений конічний палець, перше зубчасте колесо, в свою чергу, зачеплене з другим зубчастим колесом з передаточним відношенням між ними "два" з негативною ознакою, друге зубчате колесо нерухомо встановлено на валик, який утворює обертальну кінематичну пару з кривошипом, на другому кінці валика нерухомо встановлена друга зірочка, яка зачеплена з ланцюгом, який, в свою чергу, зачеплений з першою зірочкою, передаточне відношення між зірочками дорівнює "одиниці" з позитивною ознакою. Механізм кардіоїдографа зображено на кресленнях, де: фіг. 1 - вигляд спереду, фіг. 2 розріз А-А на фіг. 1. 1 UA 86700U 5 10 15 20 25 30 Механізм кардіоїдографа складається із корпусу 1, на який рухомо встановлений вал 2. У корпусі 1 співвісно з валом 2 встановлена перша зірочка 3. На ведучий вал 2 за допомогою шпонки 4 жорстко закріплений одним кінцем кривошип 5. На другому кінці кривошипа жорстко закріплений палець 6, на якому рухомо встановлено перше зубчасте колесо 7. З зубчастим колесом 7 жорстко закріплений важіль 8, таким чином, що його продовжна вісь проходить через центр обертання зубчастого колеса 7. На продовжній осі важеля 8 на відстані, рівній дві довжини кривошипа 5, закріплено конічний палець 9. Перше зубчасте колесо 7, в свою чергу, зачеплене з другим зубчастим колесом 10 з передаточним відношенням між ними "два" з негативною ознакою. Друге зубчате колесо 10, через шпонку 11, нерухомо встановлено на валик 12, який утворює обертальну кінематичну пару з кривошипом 5. На другому кінці валика 12, через шпонку 13, нерухомо встановлена друга зірочка 14, яка зачеплена з ланцюгом 15, який, в свою чергу, зачеплений з першою зірочкою 3. Передаточне відношення між зірочками 3, 14 дорівнює "одиниці" з позитивною ознакою. Механізм кардіоїдографа працює таким чином. Рух від зовнішнього джерела (на кресленні не показано) передається валу 2 і через шпонку 4 - кривошипу 5. Одночасно з кривошипом 5 навколо осі вала 2 обертається зірочка 14. Ланцюг 15 обкочується навколо нерухомої зірочки 3 і обертає зірочку 14 навколо осі валика 12. Напрямок обертання зірочки 14 і кривошипа 5 протилежні і кути звороту рівні між собою, так як передаточне відношення ланцюгової передачі є "одиниця". Обертальний рух зірочки 14, через шпонку 13, передається валику 12. Від валика 12, через шпонку 11, рух передається першому зубчастому колесу 7. Так як передаточне відношення зубчастої передачі 11-8 є "два" з негативною ознакою, то кутова швидкість зубчастого колеса 7 і важеля 8 вдвічі менше кутової швидкості кривошипа 5. Отже, центр пальця 9, який знаходиться на відстані від центра зубчастого колеса 7, що у два рази більше довжини кривошипа, і це є основною умовою відтворювання кривої кардіоїду (И.И. Артоболевский, Н.И. Левитский, С.А. Черкудинов. Синтез плоских механизмов. М.: физ.-мат. лит., 1959. - С. 308, або М.Я. Выгодский. Справочник по высшей математике. М.: Наука. – 1964. - С. 495, чертеж 375). Запропонована конструкція механізму кардіоїдографа мало ланкова, проста у конструктивному виконанні, забезпечує високу точність відтворювання кривої кардіоїду, високу надійність та довговічність роботи по всій довжині відтворення кардіоїду, так як умови передачі зусиль краще. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 Механізм кардіоїдографа, який складається із корпусу, ведучого вала, кривошипів, шатунів, зубчастих коліс, який відрізняється тим, що з корпусом нерухомо з'єднана перша зірочка і вона утворює обертальну кінематичну пару з ведучим валом, на якому жорстко закріплений одним кінцем кривошип, на другому кінці кривошипа жорстко закріплений палець, на якому рухомо встановлено перше зубчасте колесо, а з першим зубчастим колесом жорстко закріплений важіль, таким чином, що його продовжна вісь проходить через центр обертання першого зубчастого колеса, на продовжній осі на відстані, рівній дві довжини кривошипа, закріплений конічний палець, перше зубчасте колесо, в свою чергу, зачеплене з другим зубчастим колесом з передаточним відношенням між ними "два" з негативною ознакою, друге зубчате колесо нерухомо встановлено на валик, який утворює обертальну кінематичну пару з кривошипом, на другому кінці валика нерухомо встановлена друга зірочка, яка зачеплена з ланцюгом, який, в свою чергу, зачеплений з першою зірочкою, передаточне відношення між зірочками дорівнює "одиниця" з позитивною ознакою. 2 UA 86700 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюAmbartsumiants Robert Vachahanovych, Ambartsumiants Ruben Robertovych
Автори російськоюАмбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович
МПК / Мітки
МПК: F16H 21/00
Мітки: кардіоїдографа, механізм
Код посилання
<a href="https://ua.patents.su/5-86700-mekhanizm-kardiodografa.html" target="_blank" rel="follow" title="База патентів України">Механізм кардіоїдографа</a>
Механізм кардіоїдографа
Номер патенту: 72626
Опубліковано: 27.08.2012
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович
МПК: F16H 21/00
Мітки: кардіоїдографа, механізм
Формула / Реферат:
Механізм кардіоїдографа, який містить корпус, ведучий вал, кривошип, шатун, який відрізняється тим, що ведуча ланка виконана у вигляді вал-шестірні, зачеплена із зубчастим колесом з передаточним відношенням між ними, рівним "двом" з негативною ознакою, яка в свою чергу жорстко сполучена з другим зубчастим колесом, яке зачеплене з таким же зубчастим колесом, рухомо встановленим на вал-шестірні і з передаточним відношенням між ними...
Рейковий механізм
Номер патенту: 19504
Опубліковано: 15.12.2006
Автор: Колотуша Петро Федорович
МПК: F16H 19/00
Формула / Реферат:
1. Рейковий механізм, який містить корпус, зубчасту рейку, основне зубчасте колесо внутрішнього зачеплення з валом, зубчасте колесо, яке взаємодіє з основним колесом, який відрізняється тим, що додатково містить друге основне колесо з внутрішнім зачепленням, яке жорстко встановлене на вихідному валу, на якому між основними колесами вільно розташовані два центральних зубчастих колеса з водилами і сателітними роликовими муфтами, обойми яких...
Механізм кругового поступального переміщення об’єкта
Номер патенту: 47059
Опубліковано: 11.01.2010
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/00
Мітки: кругового, об'єкта, переміщення, механізм, поступального
Формула / Реферат:
Механізм кругового поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, об'єкт переміщення, зачеплення між зубцями, який відрізняється тим, що об'єкт жорстко з'єднується із зірочкою, яка утворює рухоме з'єднання з кривошипом, іншим своїм кінцем кривошип утворює жорстке з'єднання з ведучим валом, який в свою чергу утворює рухоме з'єднання з корпусом за допомогою підшипників кочення, у корпусі нерухомо і співвісно з...
Зубчасто-важільний диференційний механізм
Номер патенту: 14352
Опубліковано: 15.05.2006
Автори: Мельник Василь Іванович, Смутко Світлана Валеріївна, Параска Георгій Борисович, Неймак Віталій Станіславович
МПК: F16H 37/00, F16H 1/28
Мітки: механізм, зубчасто-важільний, диференційний
Формула / Реферат:
Зубчасто-важільний диференційний механізм, який містить центральне зубчасте колесо, водило, два жорстко з'єднаних сателіти, встановлених на водилі, зубчасте колесо з віссю обертання, розташованою в водилі, важіль, з'єднаний з зубчастим колесом, який відрізняється тим, що центральне зубчасте колесо виконане з можливістю обертання.
Механізм повороту конвертера
Номер патенту: 22548
Опубліковано: 25.04.2007
Автори: Брук Олександр Семенович, Гатілова Валентина Іванівна, Мироненко Олександр Васильович
Мітки: механізм, повороту, конвертера
Формула / Реферат:
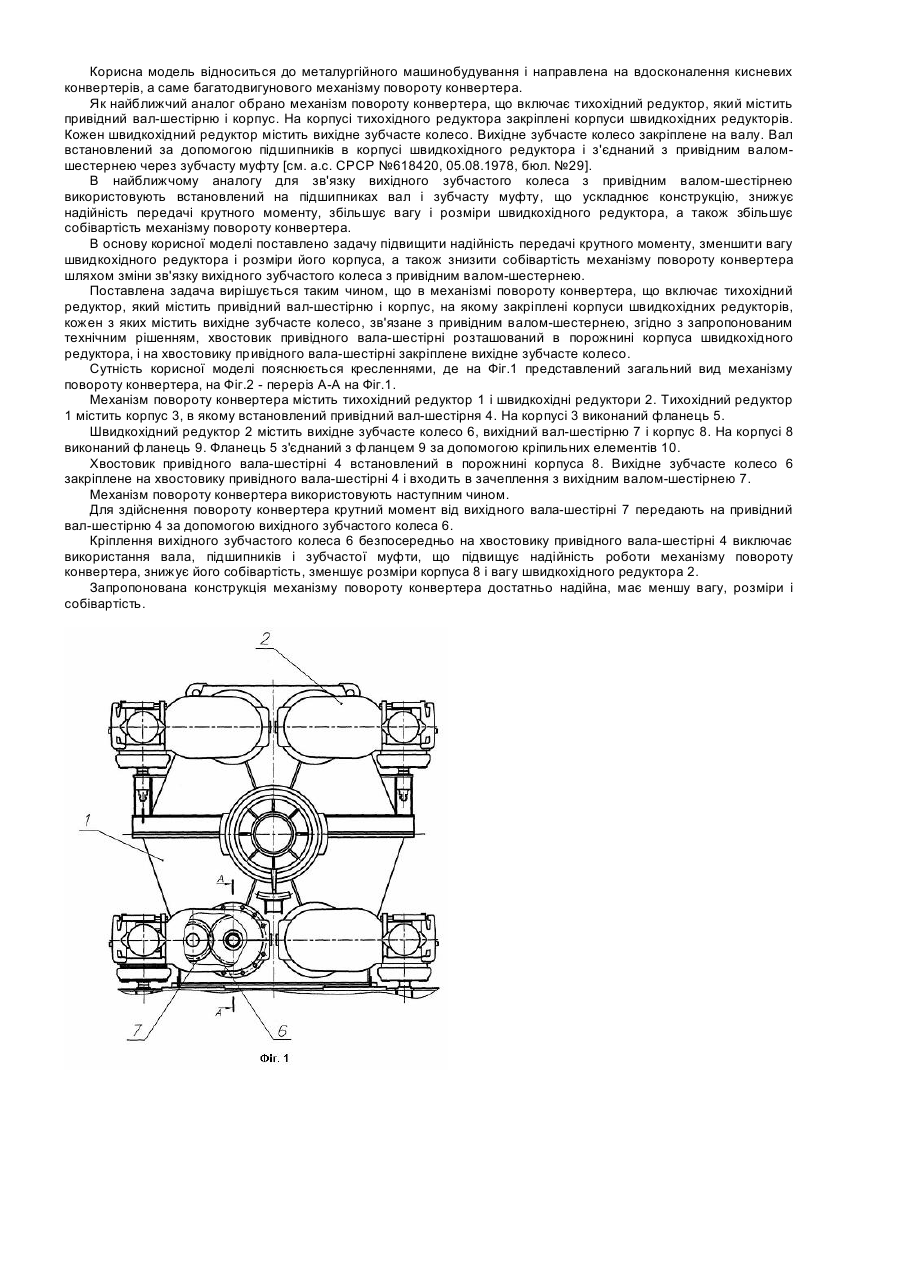
Механізм повороту конвертера, що включає тихохідний редуктор, який містить привідний вал-шестірню і корпус, на якому закріплені корпуси швидкохідних редукторів, кожен з яких містить вихідне зубчасте колесо, зв'язане з привідним валом-шестірнею, який відрізняється тим, що хвостовик привідного вала-шестірні розташований в порожнині корпусу швидкохідного редуктора, і на хвостовику привідного вала-шестірні закріплене вихідне зубчасте колесо.
Попередній патент: Відцентрова фрикційна муфта
Наступний патент: Спосіб експрес-оцінки стану рідинно-фазного об’єкта
Випадковий патент: Спосіб лікування астенічного синдрому при віддалених наслідках повторної легкої закритої черепно-мозкової травми