Регулювальний пристрій
Формула / Реферат
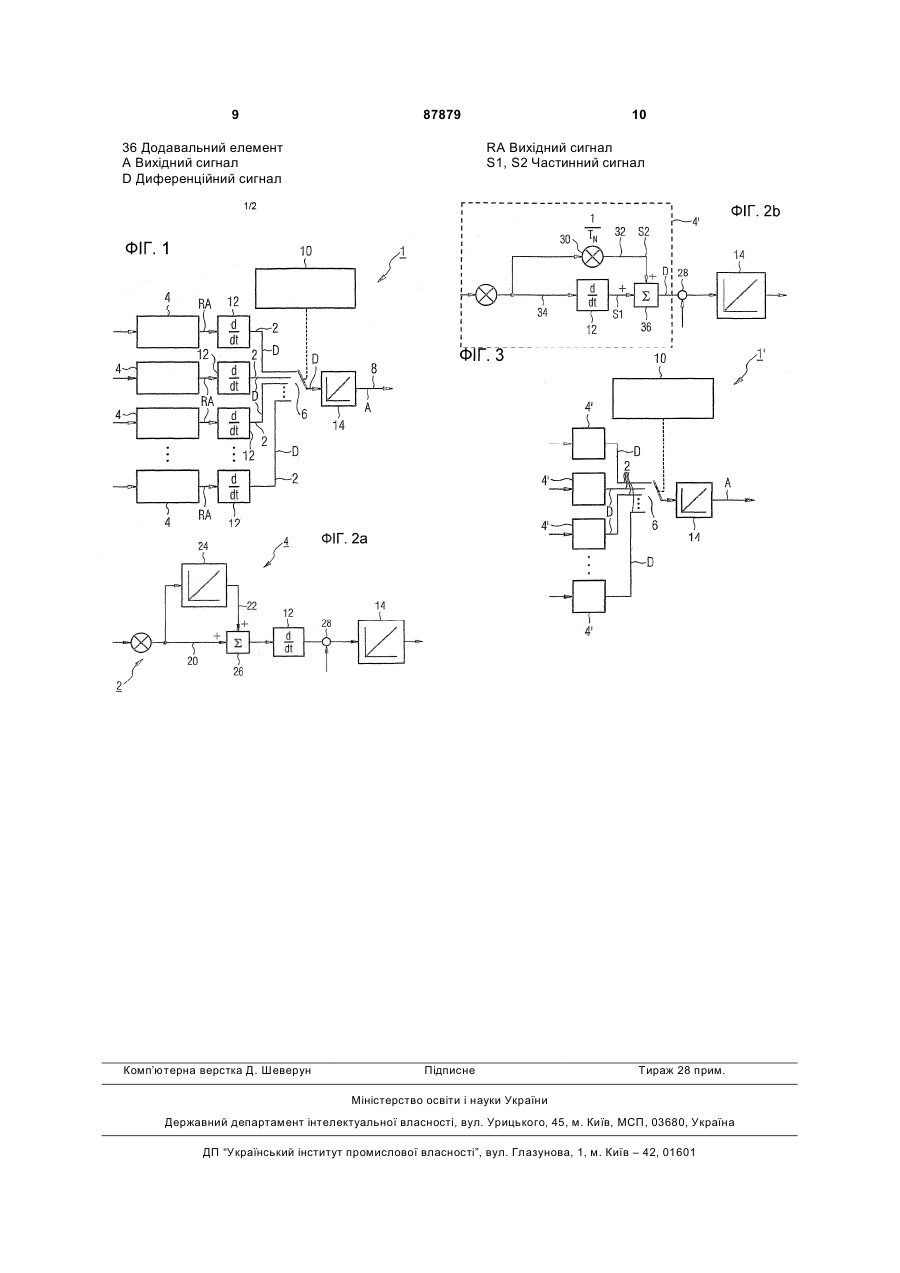
1. Регулювальний пристрій (1, 1'), що містить кілька запаралелених сигнальними входами регулювальних вузлів (4, 4'), виходи яких через перемикальний вузол (6) зв'язані зі спільним сигнальним виходом (8), причому перед перемикальним вузлом (6) включені надані кожному регулювальному вузлу (4, 4') диференціювальні елементи (12), а після перемикального вузла (6) включений інтегрувальний елемент (14).
2. Регулювальний пристрій (1, 1') за п. 1, який відрізняється тим, що один чи кожен із диференціювальних елементів (12) інтегрований до відповідного регулювального вузла (4, 4').
3. Регулювальний пристрій (1, 1') за п. 2, який відрізняється тим, що регулювальний вузол (4, 4'), оснащений диференціювальним елементом (12), має з одного боку оснащену пропорційним елементом (30) пропорційну гілку (32), а з іншого боку - оснащену диференціювальним елементом (12) диференційну гілку (34), виходи яких зв'язані із спільним додавальним елементом (26).
4. Спосіб експлуатації регулювального пристрою (1, 1'), що містить кілька запаралелених сигнальними входами регулювальних вузлів (4, 4'), виходи яких через перемикальний вузол (6) зв'язані зі спільним сигнальним виходом (8), за яким на перемикальний вузол (6) як вихідний сигнал подають характеристичний для похідної за часом вихідного сигналу (A, RA) регулювального вузла (4, 4') диференційний сигнал (D), із якого на виході перемикального вузла (6) шляхом інтегрування за часом формують вихідний сигнал (А) регулювального пристрою (1, 1').
5. Спосіб за п. 4, який відрізняється тим, що диференційний сигнал (D) отримують шляхом формування похідної за часом від вихідного сигналу (RA) регулювального вузла (4, 4').
6. Спосіб за п. 4, який відрізняється тим, що диференційний сигнал (D) отримують шляхом додавання першого частинного сигналу (S1), утвореного шляхом формування похідної за часом від сигналу регулятора, і другого частинного сигналу (S2), пропорційного сигналові регулятора.
Текст
1. Регулювальний пристрій (1, 1'), що містить кілька запаралелених сигнальними входами регулювальних вузлів (4, 4'), виходи яких через перемикальний вузол (6) зв'язані зі спільним сигнальним виходом (8), причому перед перемикальним вузлом (6) включені надані кожному регулювальному вузлу (4, 4') диференціювальні елементи (12), а після перемикального вузла (6) включений інтегрувальний елемент (14). 2. Регулювальний пристрій (1, 1') за п. 1, який відрізняється тим, що один чи кожен із диференціювальних елементів (12) інтегрований до відповідного регулювального вузла (4, 4'). 3. Регулювальний пристрій (1, 1') за п. 2, який відрізняється тим, що регулювальний вузол (4, 4'), оснащений диференціювальним елементом (12), C2 2 (19) 1 3 бути передбачена велика кількість альтернативних каналів регулювання, які можуть відрізнятися з точки зону внутрішніх процесів чи індивідуально попередньо заданих робочих параметрів. Зрештою, може бути навіть передбачене перемикання між регулювальними вузлами, які регулюють різні змінні параметри процесу. Для перемикання між різними режимами роботи у таких регулювальних пристроях шляхом керування перемикальним вузлом здійснюють відокремлення активного у даний момент регулювального вузла від сигнального виходу і наступне з'єднання альтернативного регулювального вузла з сигнальним виходом. Одначе із експлуатаційних міркувань при такому перемиканні не завжди може бути забезпечено, що від'єднуваний регулювальний вузол і під'єднуваний регулювальний вузол в момент перемикання мають точно однаковий вихідний сигнал, оскільки внаслідок можливих відмінностей процесів, що відбуваються у цих вузлах, можливі незначні відмінності у сигналах. Ці різниці сигналів можуть бути навіть порівняно значними, оскільки тільки-но під'єднаний регулювальний вузол перед перемиканням перебував поза замкнутим контуром регулювання і тому можлива тенденція „вибігання" у крайнє положення. Тим більше відхилення сигналів виникають у разі, коли регулювальним вузлам задані різні регульовані величини. У разі наявності такої різниці сигналів між регулювальними вузлами при перемиканні вихідний сигнал зазнає так званого стрибка. З точки зору експлуатаційних вимог чи можливих критеріїв стабільності такі стрибки сигналу є вкрай небажаними. Для того, щоб з метою уникнення такого стрибка сигналу при перемиканні різних регулювальних вузлів уможливити так зване „безударне" перемикання, яке забезпечить значно підвищену експлуатаційну надійність регулювального пристрою, в принципі можуть бути реалізовані концепції гасіння чи компенсації. У разі гасіння виходи окремих регулювальних вузлів не перемикають, а через мінімальну чи максимальну ланку передають на вихідний канал. При такій схемі перемикання завжди здійснюється безударно. Правда, застосування такої концепції значною мірою обмежене, оскільки мінімальний чи максимальний вузол на виході повністю визначає правило перемикання. При цьому реалізація перемикання за будь-яким правилом, що є ні мінімальним, ні максимальним, не можлива. До того ж, концепція гасіння для більшості практичних застосувань є надто повільною, оскільки „гасильний" регулювальний вузол має ще пройти „ділянку", поки зможе відбутися гасіння. На цій підставі саме для промислових застосувань регулювальних пристроїв концепція гасіння не особливо поширена. Альтернативно може бути застосована так звана концепція „компенсаціі", при якій перемикання дозволене за будь-яким критерієм, сформованим так званою „перемикальною логікою". При такій схемі вихідний сигнал першого регулювального вузла у разі потреби може бути як додатковий вхідний сигнал поданий на альтернативний, під'єднуваний регулювальний вузол і у ньому врахо 87879 4 ваний. Одначе при такій схемі необхідна взаємна опційна подача вихідних сигналів усіх регулювальних блоків на входи усіх інших регулювальних блоків. Тому така концепція саме при паралельному під'єднанні кількох регулювальних вузлів є дуже складною, що може виразитися у особливо значних витратах на проектування і виготовлення. До того ж, у разі реалізації в аналоговій техніці недоліком концепції компенсації є те, що під час перемикання короткочасно видається „нульовий сигнал”. Тому таке перемикання у аналоговому виконанні є не безударним у вужчому смислі. На противагу цьому при альтернативному цифровому виконанні кожна окрема схема компенсації представляє шлейф для сигналу, який у цифровій техніці не може працювати миттєво. Недоліком таких сигнальних шлейфів у цифровій техніці є те, що при проектуванні слід враховувати не лише правильність з'єднань, але й часові співвідношення сигналів компенсації. Ця проблема може ускладнитися у разі використання кількох асинхронних процесорів. Саме у разі складних систем регулювання ця концепція також придатна лише обмежено. Задачею винаходу є розробка регулювального пристрою вказаного вище виду, за допомогою якого надійно і простими засобами уможливлюється здійснення безударного перемикання між окремими регулювальними вузлами. Крім того, має бути розроблений спосіб експлуатації такого регулювального пристрою. Стосовно регулювального пристрою ця задача згідно з винаходом вирішена тим, що між виходом кожного регулювального вузла і входом перемикального пристрою включено диференціювальний елемент, а на виході перемикального пристрою включено інтегрувальний елемент. Регулювальний пристрій виконано таким чином, що вихідні сигнали окремих регулювальних вузлів спочатку диференціюються за часом, потім перемикаються, а після цього інтегруються за часом для формування вихідного сигналу. При цьому винахід виходить із міркування, що для особливо просто складеної концепції безударного перемикання має бути уникнута необхідність тривалого поперечного вирівнювання між окремими регулювальними вузлами для уникнення стрибків сигналу. Замість цього вихідні сигнали регулювальних вузлів мають бути сформовані таким чином, що замість істинних вихідних сигналів, можливо обтяжених індивідуальними відхиленнями чи стрибками, спочатку має бути застосована спільна для усіх паралельно з'єднаних регулювальних вузлів систематика. Для цього із сформованих регулювальними вузлами вихідних сигналів спочатку утворюють похідні за часом, які на підставі спільної систематики для усіх каналів регулювання повинні мати однаковий характер. На основі цих похідних за часом від істинних сигналів може бути здійснене перемикання, причому після перемикання шляхом утворення інтеграла за часом знову формується істинний вихідний сигнал. При цьому ефекти диференціювання і наступного інтегрування в основному взаємно знищуються, а вихідний сигнал при перемиканні не зазнає стрибка, оскіль 5 ки перемикається не сам сигнал, а його похідна. Таким чином відмінності між сигналами окремих регулювальних каналів чи регуляторів при такому перемиканні можуть у всякому разі призводити до розривності у похідних за часом від вихідного сигналу, яка втім не пов'язана із розривністю у власне вихідному сигналі. При розробці регулювального пристрою кожному регулювальному вузлу може бути наданий індивідуальний, окремо виконаний диференціювальний елемент. Одначе у переважній формі виконання кожен диференціювальний елемент інтегрований у відповідний регулювальний вузол. Завдяки цьому регулювальний вузол разом із наданим йому диференціювальним елементом у модульному виконанні може бути використаний як окрема складова і у разі потреби може бути безпосередньо з'єднаний з перемикальним вузлом. Саме для випадку використання як регулювальних вузлів дуже поширених пропорційноінтегральних регуляторів (ПІ-регуляторів) регулювальний вузол із диференціювальним елементом може містити, з одного боку, пропорційну гілку є пропорційним елементом і, з іншого боку, диференційну гілку з диференціювальним елементом, які на виході зв'язані із суматором. При такому виконанні у регулювальному вузлі формується сума із пропорційної складової і диференційної складової регулювального сигналу. При інтегруванні сигналу, здійснюваному після перемикання каналів, формується вихідний сигнал, що містить інтегральну складову (утворену із отриманої раніше пропорційної складової) і пропорційну складову (утворену із отриманої раніше диференційної складової), завдяки чому вихідний сигнал має властивості сигналу ПІ-регулятора. Стосовно способу вказана задача вирішена тим, що на перемикальний вузол як вхідний сигнал подають диференційний сигнал, що характеризує похідну за часом від вихідного сигналу регулювального вузла, із якого на виході перемикального вузла шляхом інтегрування за часом формують вихідний сигнал регулювального пристрою. У переважній формі виконання диференційний сигнал отримують шляхом формування похідної від вихідного сигналу регулювального вузла. У альтернативній переважній формі виконання, зокрема для моделювання ПІ-регулятора, диференційний сигнал отримують шляхом додавання першої складової, отриманої шляхом формування похідної за часом від сигналу регулятора, і другої складової, пропорційної сигналові регулятора. Переваги, досягнуті винаходом, полягають зокрема у тому, що шляхом диференціювання за часом сигналу регулятора з наступним інтегруванням за часом отримують у кінцевому результаті в основному не змінений вихідний сигнал, оскільки диференціювання і інтегрування взаємно знищуються. Одначе завдяки перемиканню, здійснюваному між диференціюванням і інтегруванням, надійно усувається стрибок сигналу, оскільки перемикається не сам сигнал, а його похідна. Таким чином, простими засобами і без додаткового ускладнення схеми з'єднання регулювальних вузлів між собою уможливлюється дійсно безударне 87879 6 перемикання регулювальних вузлів. Завдяки порівняно простій концепції відсутні додаткові обмеження стосовно типу використовуваних регулювальних вузлів чи критеріїв перемикання. Зокрема відпадає необхідність оснащення регулювальних вузлів функцією компенсації. До того ж, при принципово швидкодійній структурі регулятора у схемі з'єднань відсутні петлі сигналу, причому як регулювальні вузли можуть бути використані будь-які лінійні, нелінійні і/або адаптивні регулятори. Нижче приклад виконання винаходу детальніше пояснюється з використанням фігур. На них зображено: фіг. 1. Регулювальний пристрій, фіг. 2.а і 2b Схеми регулювального вузла, фіг. 3. Альтернативна форма виконання регулювального вузла. Однакові елементи на всіх фігурах мають однакові позиційні позначення. Регулювальний пристрій 1 згідно з фіг. 1 у багатоканальному виконанні, в якому кілька регулювальних каналів 2 паралельно з'єднані з боку вхідного сигналу, має кілька регулювальних вузлів 4, які паралельно з'єднані з боку вхідного сигналу, а на виході через перемикальний вузол 6 з'єднані зі спільним сигнальним виходом 8. При цьому керування перемикальним вузлом 6 здійснюється за допомогою перемикального логічного вузла 10. Завдяки своїй багатоканальній структурі регулювальний пристрій придатний зокрема для промислових застосувань, при яких в залежності від потреб і/або виробничих режимів поперемінно може бути активним один із регулювальних вузлів 4. При цьому може бути передбачено, наприклад, що один із регулювальних вузлів 4 має бути розрахований для ручного регулювання (яке називають також керуванням чи регулюванням з розірваним контуром („Open-Іоор")), причому решта регулювальних вузлів 4 можуть бути розраховані на автоматичне ведення процесу, в залежності від потреб за відмінними одна від іншої динамічними моделями. Регулювальний пристрій 1 розрахований для особливо високої експлуатаційної надійності і стабільності. При цьому слід враховувати ту обставину, що регулювальні вузли 4 на основі внутрішніх властивостей або на основі різних регульованих величин і регулювальних функцій або на основі того факту, що не задіяні регулятори мають тенденцію "вибігання" у крайню точку, на їх виходах можуть утворитися у більшій чи меншій мірі відмінні між собою вихідні сигнали. Внаслідок цього при безпосередньому перемиканні між окремими регулювальними каналами 2 чи регуляторами можуть виникати більш чи менш виражені стрибки сигналів на сигнальному виході 8. Для уникнення таких небажаних стрибків сигналу, які могли б призвести до збудження небажаних чи неприпустимих коливань у контурі регулювання, у регулювальному пристрої 1 здійснене так зване безударне перемикання, при якому подібні стрибки сигналу мають бути виключені. Для забезпечення такого безударного перемикання особливо простими засобами у регулювальному пристрої 1 у кожному регулювальному каналі 7 2 передбачено диференціювальний елемент 12, під'єднаний між регулювальним вузлом 4 і перемикальним вузлом 6. Додатково після перемикального вузла 6 під'єднано інтегрувальний елемент 14. Таким чином, при такій схемі під час роботи регулювального пристрою 1 у кожному регулювальному каналі 2 сформований регулювальним вузлом 4 вихідний сигнал RA спочатку у диференціювальному елементі 12 здійснюють диференціювання за часом, перетворюючи його у диференційований сигнал D. Диференційований сигнал D подають на перемикальний вузол, де у разі потреби здійснюють перемикання між окремими регулювальними каналами 2. Перемикальний вузол 6 видає диференційований сигнал D вибраного як активний регулювального каналу 2. Потім цей переданий далі диференційований сигнал D інтегрують за часом у під'єднаному на виході перемикального вузла 6 інтегрувальному елементі 14. Результат цієї операції як вихідний сигнал А подають на сигнальний вихід 8. При такому принципі роботи регулювального пристрою 1 диференціювання і наступне інтегрування вихідного сигналу RA даного регулювального вузла 4 взаємно компенсуються, тому сформований регулювальним пристроєм 1 вихідний сигнал А в основному залишається не зміненим цими операціями. Правда, у перемикальному вузлі 6 здійснюють перемикання не власне вихідних сигналів RA регулювальних каналів 2, а їх похідних за часом, представлених диференційованим сигналом D. Таким чином, відхилення у вихідних сигналах RA регулювальних вузлів 4 не впливають один на інший, і вихідний сигнал А не зазнає стрибків при перемиканні. Тому перемикання є безударним у вужчому смислі. Концепція, базована на перемиканні похідних вихідних сигналів RA регулювальних вузлів 4 з наступним інтегруванням, принципово не обумовлює жодних обмежень стосовно типу використовуваних регуляторів чи критеріїв перемикання. Зокрема не вимагається, щоб регулювальні вузли 4 мали функцію компенсації чи подібне. Зокрема може бути здійснене безударне перемикання широко використовуваних регуляторів типів П (пропорційні), І (інтегральні), ПІ (пропорційноінтегральні), ПД (пропорційно-диференційні), ПІД (пропорційно-інтегро-диференційні) або будь-які лінійні, нелінійні чи адаптивні регулятори з особливо низькими апаратними і конструктивними витратами, без необхідності утворення петель сигналів. Не вимагається, щоб регулятори, що підлягають перемиканню, були однакового типу. Більш того, вони навіть можуть оперувати різними регульованими величинами. Наприклад, один регулятор може бути регулятором струму, а інший регулятором напруги. Регулювальні вузли 4 можуть бути ПІрегуляторами, як схематично для прикладу показано на фіг. 2а. При цьому регулювальний вузол 4 містить пропорційний канал 20 і паралельно до його сигнального входу під'єднаний інтегральний канал 22, що має інтегрувальний елемент 24. Виходи пропорційного каналу 20 і-інтегрального каналу 44 з'єднані з додавальним елементом 26, 87879 8 який формує суму обох складових сигналів. До його виходу під'єднано диференціювальний елемент 12, який у свою чергу виходом з'єднаний з перемикальним вузлом 6, позначеним перемикальною точкою 28. При відповідному "активному" режимі перемикального вузла 6 утворений таким чином регулювальний канал 2 з'єднаний з інтегрувальним елементом 14. у разі структури, зображеної на фіг. 2а, регулювальний вузол 4, виконаний як звичайний ПІ-регулятор, з'єднаний із окремо виконаним диференціювальним елементом 12 для утворення регулювального каналу 2. Рівноцінна з точки зору технічних параметрів система може бути утворена шляхом інтегрування диференційного елемента 12 у регулювальний вузол 4. Приклад реалізації такої структури за допомогою ПІ-регулятора представлений на фіг. 2b. При цьому регулювальний вузол 4, оснащений диференціювальним елементом 12, має з одного боку пропорційну гілку 32, оснащену пропорційним елементом 30, а з іншого боку -диференційну гілку 34, оснащену диференціювальним елементом 12. Пропорційна гілка 32 і диференційна гілка 34 з'єднані зі спільним додавальним елементом 36. У цій формі виконання диференційний сигнал D, характеристичний для похідної за часом від вихідного сигналу RA регулювального вузла 4, утворений шляхом додавання першого частинного сигналу S1, утвореного шляхом формування похідної за часом від сигналу регулятора, і другого частинного сигналу S2, пропорційного сигналові регулятора. Сформований таким чином диференційний сигнал D відповідно до описаної вище форми виконання через перемикальну точку 28, що характеризує перемикальний вузол 6, у разі потреби подають на інтегрувальний елемент 14. Приклад виконання регулювального пристрою 1/, утворений із таких регулювальних вузлів 4/, уже оснащених диференціювальним елементом, зображено на фіг. 3. Із дотриманням концепції перемикання сигналів регулювальних каналів чи регуляторів у вигляді похідних за часом з наступним інтегруванням у цій формі виконання регулювальні вузли 4/, що як вихідний сигнал формують диференційний сигнал D, безпосередньо зв'язані з перемикальним вузлом 6. Після нього під'єднано інтегрувальний елемент 14 для утворення власне вихідного сигналу А. Позиційні позначення 1,1/ Регулювальний пристрій 2 Регулювальний канал 4, 4/ Регулювальний вузол 6 Перемикальний вузол 8 Сигнальний вихід 10 Перемикальний логічний вузол 12 Диференціювальний елемент 14 Інтегрувальний елемент 20 Пропорційний канал 22 Інтегральний канал 24 Інтегрувальний елемент 26 Додавальний елемент 28 Перемикальна точка 30 Пропорційний елемент 32 Пропорційна гілка 34 Диференційна гілка 9 87879 36 Додавальний елемент А Вихідний сигнал D Диференційний сигнал Комп’ютерна верстка Д. Шеверун 10 RA Вихідний сигнал S1, S2 Частинний сигнал Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl device
Автори англійськоюMorokhovskyi Viktor
Назва патенту російськоюРегулировочное устройство
Автори російськоюМороховский Виктор
МПК / Мітки
МПК: G05B 7/00
Мітки: пристрій, регулювальний
Код посилання
<a href="https://ua.patents.su/5-87879-regulyuvalnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Регулювальний пристрій</a>
Запірно-регулювальний пристрій
Номер патенту: 31580
Опубліковано: 10.04.2008
Автор: Ратманський Йосип Ієгудович
МПК: G05D 16/00
Мітки: запірно-регулювальний, пристрій
Формула / Реферат:
1. Запірно-регулювальний пристрій, що містить корпус з вхідним та вихідним каналами, розміщений у корпусі чутливий елемент, настроювальну пружину, рухому рамку з упорним елементом, регулювальний клапан та електромагнітний привід, який відрізняється тим, що регулювальний клапан встановлений між затвором та упорним елементом рухомої рамки з можливістю контакту з ним.2. Запірно-регулювальний пристрій за п. 1, який відрізняється тим, що...
Дросель регулювальний
Номер патенту: 33183
Опубліковано: 10.06.2008
Автори: Синельник Руслан Анатолійович, Німець Тетяна Миколаївна, Чубар Сергій Вікторович, Кравців Володимир Тарасович, Донской Федір Павлович, Хомин Іван Іванович, Малітовський Роман Володимирович, Донской Дмитро Федорович
МПК: G05D 7/00
Мітки: дросель, регулювальний
Формула / Реферат:
1. Дросель регулювальний, що містить корпус із вхідною і вихідною порожнинами, між якими розташований вузол дроселювання, який відрізняється тим, що вхід і вихід трубок вузла дроселювання виконані у вигляді аксіального каналу, а вихідний кінець трубки пробки з'єднано гайкою із виходом заглушки, який розташовано співвісно з наступною трубкою вузла дроселювання, вхід у який виконано у вигляді аксіального каналу, а вихід - у вигляді поздовжніх...
Дросель регулювальний

Номер патенту: 52748
Опубліковано: 15.01.2003
Автори: Донской Федір Павлович, Синюк Борис Борисович, Кудінов Павло Петрович, Кравченко Тетяна Павлівна, Фик Ілля Михайлович, Сливканич Володимир Семенович, Донской Дмитро Федорович
МПК: G05D 7/00
Мітки: дросель, регулювальний
Формула / Реферат:
Дросель регулювальний, котрий містить корпус із вхідною і вихідною порожнинами, між якими розташований вузол дроселювання і ходовий гвинт, з’єднаний із вузлом дроселювання, який утворено з пучків трубок з торцевою заглушкою і пробкою з повздовжніми каналами, з’єднаними з ходовим гвинтом, який відрізняється тим, що торцева заглушка виконана у вигляді пучка трубок, з’єднаних між собою і встановлених з можливістю переміщення пучка трубок у...
Дросель регулювальний
Номер патенту: 78880
Опубліковано: 25.04.2007
Автори: Кравченко Віктор Григорович, Думич Юрій Володимирович, Сливканич Володимир Семенович, Донской Федір Павлович, Нащочич Петро Дмитрович, Донской Дмитро Федорович, Капустін Аркадій Леонідович, Остапенко Олександр Васильович
МПК: G05D 7/00
Мітки: регулювальний, дросель
Формула / Реферат:
Дросель регулювальний, який містить корпус із входом і виходом, між якими розташований вузол дроселювання і ходовий гвинт з тягою з'єднаний з вузлом дроселювання, який утворено із з‘єднаних між собою пробки і заглушки з повздовжніми каналами, який відрізняється тим, що вузол дроселювання виконаний із трьох частин, з'єднаних між собою і встановлених в корпусі дроселя послідовно у такому складі, що перша частина розташована на вході корпуса і...
Дросель регулювальний
Номер патенту: 72929
Опубліковано: 16.05.2005
Автори: Фещенко Микола Іванович, Четверяков Олександр Миколаєвич, Донской Федір Павлович, Донской Дмитро Федорович
МПК: G05D 7/00
Мітки: регулювальний, дросель
Формула / Реферат:
Дросель регулювальний, що містить корпус із вхідною і вихідною порожнинами, між якими розташований вузол дроселювання, ходовий гвинт, гайка і тяга, з'єднана з вузлом дроселювання, який створено із заглушки, виконаної у вигляді пучка трубок, вільні кінці яких встановлено у поздовжні канали пробки з можливістю переміщення, а заглушка з'єднана тягою з гайкою і ходовим гвинтом, який відрізняється тим, що заглушка і пробка виконані у вигляді...
Попередній патент: Шаруватий композиційний матеріал для каталізу, процес виготовлення каталізатора та виготовлення алкенілалканоатів
Наступний патент: Вакуумно-дугове джерело плазми
Випадковий патент: Зубна щітка та ручка зубної щітки