Спосіб керування літальним апаратом і пристрій для його здійснення
Номер патенту: 88038
Опубліковано: 10.09.2009
Автори: Хорольський Петро Георгійович, Дронь Микола Михайлович


Формула / Реферат
1. Спосіб керування літальним апаратом при польоті в атмосфері, що полягає у русі літального апарата за програмою заданої орієнтації відносно набігаючого потоку, який відрізняється тим, що вимірюють поточний просторовий кут атаки ![]() , порівнюють його модуль з модулем програмного значення просторового кута атаки
, порівнюють його модуль з модулем програмного значення просторового кута атаки ![]() і відхиляють поздовжню вісь літального апарата відносно набігаючого потоку на величину просторового кута атаки, модуль якої не перевищує максимально допустимої для літального апарата величини просторового кута атаки
і відхиляють поздовжню вісь літального апарата відносно набігаючого потоку на величину просторового кута атаки, модуль якої не перевищує максимально допустимої для літального апарата величини просторового кута атаки ![]() .
.
2. Спосіб за п. 1, який відрізняється тим, що модуль поточного просторового кута атаки ![]() обмежують величиною
обмежують величиною ![]() , де
, де ![]() - похибка системи стабілізації літального апарата, причому, якщо
- похибка системи стабілізації літального апарата, причому, якщо ![]() , то програмне значення
, то програмне значення ![]() задають нульовим.
задають нульовим.
3. Спосіб за пп. 1, 2, який відрізняється тим, що програмне значення просторового кута атаки ![]() визначають як оптимальне значення просторового кута атаки
визначають як оптимальне значення просторового кута атаки ![]() , де
, де ![]() визначають, в свою чергу, як
визначають, в свою чергу, як ![]() , де
, де ![]() - аргумент рішення рівняння у дужках, J - критерій ефективності або цільова функція, за якою оцінюється успіх вирішення задач польоту, наприклад, масою корисного вантажу,
- аргумент рішення рівняння у дужках, J - критерій ефективності або цільова функція, за якою оцінюється успіх вирішення задач польоту, наприклад, масою корисного вантажу, ![]() - поточне значення часткової похідної J по куту атаки
- поточне значення часткової похідної J по куту атаки ![]() з урахуванням вищезазначеного обмеження величини модуля
з урахуванням вищезазначеного обмеження величини модуля ![]() .
.
4. Спосіб за пп. 1-3, який відрізняється тим, що вимірюють або визначають, наприклад по вимірах швидкості та висоти польоту, поточне значення швидкісного напору q, поточне максимальне допустиме значення просторового кута атаки визначають як
![]() , де
, де ![]() - розрахункове максимальне допустиме значення добутку величин швидкісного напору q та просторового кута атаки.
- розрахункове максимальне допустиме значення добутку величин швидкісного напору q та просторового кута атаки.
5. Спосіб за пп. 1, 2, 4, який відрізняється тим, що визначають оптимальні значення кутів атаки ![]() та ковзання
та ковзання ![]() , наприклад, як
, наприклад, як  , де
, де ![]() - аргумент рішення системи рівнянь у дужках,
- аргумент рішення системи рівнянь у дужках, ![]() - поточні значення часткових похідних J по кутах атаки
- поточні значення часткових похідних J по кутах атаки ![]() та ковзання
та ковзання ![]() , відхиляють літальний апарат відносно набігаючого потоку на кут атаки
, відхиляють літальний апарат відносно набігаючого потоку на кут атаки  і кут ковзання
і кут ковзання
 , причому
, причому ![]() визначають з урахуванням наведених залежностей для визначення кутів атаки
визначають з урахуванням наведених залежностей для визначення кутів атаки ![]() та ковзання
та ковзання ![]() .
.
6. Спосіб за пп. 1, 2, 4, який відрізняється тим, що визначають оптимальні значення просторового кута атаки ![]() та аеродинамічного крену
та аеродинамічного крену ![]() , наприклад, як
, наприклад, як  , де
, де ![]() - аргумент рішення рівняння у дужках,
- аргумент рішення рівняння у дужках, ![]() - поточні значення часткових похідних J по кутах атаки
- поточні значення часткових похідних J по кутах атаки ![]() та аеродинамічного крену
та аеродинамічного крену ![]() , відхиляють літальний апарат відносно набігаючого потоку на кут атаки
, відхиляють літальний апарат відносно набігаючого потоку на кут атаки  , причому
, причому ![]() визначають з урахуванням наведеної залежності для визначення просторового кута атаки для
визначають з урахуванням наведеної залежності для визначення просторового кута атаки для ![]() .
.
7. Спосіб за пп. 1, 3, 5, 6, який відрізняється тим, що порівнюють ![]() з
з ![]() і, якщо
і, якщо ![]() , то зменшують нахил літального апарата до напрямку набігаючого потоку до величини
, то зменшують нахил літального апарата до напрямку набігаючого потоку до величини ![]() .
.
8. Пристрій для здійснення способу за п. 1, який включає літальний апарат та його систему керування, який відрізняється тим, що на апараті встановлений щонайменше один датчик просторового кута атаки, інформаційні виходи якого зв'язані з додатковим відповідним входом системи керування.
Текст
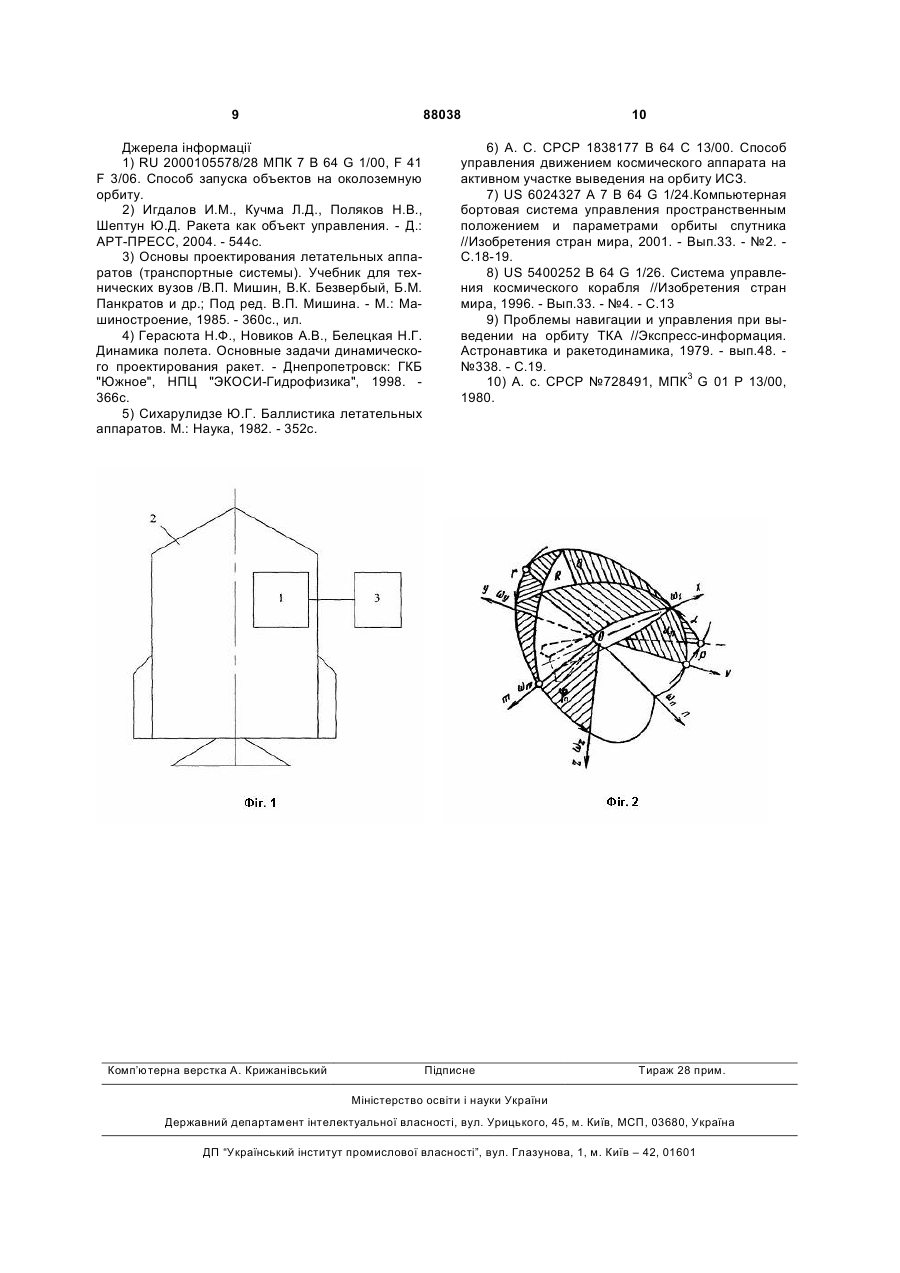
1. Спосіб керування літальним апаратом при польоті в атмосфері, що полягає у русі літального апарата за програмою заданої орієнтації відносно набігаючого потоку, який відрізняється тим, що вимірюють поточний просторовий кут атаки aП , порівнюють його модуль з модулем програмного значення просторового кута атаки aП _ ПРОГ і від 2 3 88038 ì 2 , якщо a 2 + bopt £ aП _ Доп opt ïa opt ï a=í a opt , якщо a 2 + b2 > aП _ Доп opt opt ïaП _ Доп × 2 ï a 2 + bopt opt î і кут ковзання ì 2 , якщо a opt + b2 £ aП _ Доп opt ïbopt ï b=í bopt , якщо a 2 + b2 > aП _ Доп ïaП _ Доп × opt opt 2 2 a opt + bopt ï î ¶J ¶J , визначають з урахуванням на, причому ¶a ¶b ведених залежностей для визначення кутів атаки a та ковзання b . 6. Спосіб за пп. 1, 2, 4, який відрізняється тим, що визначають оптимальні значення просторового кута атаки aП _ opt та аеродинамічного крену jП _ opt , æ ¶J ö = 0÷ ç ¶aП ç ÷ arg наприклад, як arg ç ÷ , де a П _ opt , jП _ opt ç ¶J a П _ opt , jП _ opt = 0÷ ç ¶j ÷ è П ø аргумент рішення рівняння у дужках, ¶J ¶J , = 0 - поточні значення часткових похід¶aП ¶jП Винахід належить до ракетно-космічної техніки, конкретно - до літальних апаратів (ЛА), наприклад, ракет - носіїв, які здійснюють політ в атмосфері. Відомий спосіб керування балістичною ракетою [1, 2] шляхом зміни орієнтації ракети в польоті, зокрема визначення і відпрацювання програми кута тангажа на активній ділянці траєкторії (АДТ) [2, с.438-443], яка забезпечує попадання корисного вантажу (KB) в ціль. Його недолік в придатності для позаатмосферної частини АДТ. Відомий спосіб керування літальним апаратом - ракетою - в атмосфері на активній ділянці траєкторії [3, с.65; 4, с.306], який полягає в русі із заданими (нульовими) кутами атаки та крену. Його недолік - у невикористанні підйомної сили для підвищення вантажопідйомності ЛА. Відомий спосіб керування апаратом, що спускається в атмосфері, (СА) [5, с.267], відповідно до якого СА орієнтують на задані кути атаки та крену, причому кут атаки формують в заданому діапазоні величин. Найбільш близьким аналогом є спосіб [6], що полягає у русі по програмі заданої орієнтації відносно набігаючого потоку (кута атаки). Його недоліком є неоптимальність для поточної реалізації параметрів руху та придатність для ЛА, для яких відсутні обмеження по навантаженням на корпус апарата. Відома комп'ютерна бортова система керування просторовим положенням і параметрами орбіти супутника [7]. Ця система забезпечує під них J по кутах атаки 4 aП та аеродинамічного крену jП , відхиляють літальний апарат відносно набігаючого потоку на кут атаки ìaП _ opt , якщо aП _ opt £ aП _ Доп ï = í aП причому ïaП _ Доп , якщо aП _ opt > aП _ Доп , î ¶J визначають з урахуванням наведеної залеж¶aП ності для визначення просторового кута атаки для aП . 7. Спосіб за пп. 1, 3, 5, 6, який відрізняється тим, ~ ~ що порівнюють aП з aП _ Доп і, якщо aП > aП _ Доп , то зменшують нахил літального апарата до на~ прямку набігаючого потоку до величини aП _ Доп . 8. Пристрій для здійснення способу за п. 1, який включає літальний апарат та його систему керування, який відрізняється тим, що на апараті встановлений щонайменше один датчик просторового кута атаки, інформаційні виходи якого зв'язані з додатковим відповідним входом системи керування. держання просторового положення і параметрів орбіти супутника. Недоліки цього рішення співпадають з вищенаведеними для [9]. Відома також система керування (СК) космічним кораблем [8]. Недоліки цього рішення співпадають з вищенаведеними для [9]. Найбільш близьким аналогом є система керування літального апарата [9]. Недоліком цього рішення є відсутність вимірювачів, які б забезпечили СК даними про поточне значення просторового кута атаки. В основу винаходу поставлена задача розробки способу керування літальним апаратом при польоті в атмосфері і пристрою для його здійснення мінімальної складності, які б забезпечували оптимальність траєкторії руху для будь-яких цільових функцій оцінки ефективності місії ЛА при одночасному забезпеченні його безпеки руху в умовах граничних навантажень. Поставлена задача вирішується тим, що в способі керування літальним апаратом при польоті в атмосфері, що полягає у русі по програмі заданої орієнтації відносно набігаючого потоку, вимірюють поточний просторовий кут атаки aП, порівнюють його модуль з модулем програмного значення просторового кута атаки aП_ПРОГ і відхиляють поздовжню вісь літального апарата відносно набігаючого потоку на величину просторового кута атаки, модуль якої не перевищує максимально допустимої для літального апарата величини просторового кута атаки aП_Доп. 5 |aП| 88038 Модуль поточного просторового кута атаки обмежують величиною ~ = aП _ Доп - Da С , де DaС > 0 - похибка сисaП _ Доп теми стабілізації літального апарата, причому, якщо DaС ³ aП _ Доп , то програмне значення aП_ПРОГ задають нульовим. Програмне значення просторового кута атаки aП_ПРОГ визначають як оптимальне значення просторового кута атаки aП_opt, де aП_opt визначають, в ¶J = 0 , де arg - аргумент свою чергу, як arg a П _ opt ¶aП a, b рішення рівняння у дужках, J - критерій ефективності або цільова функція, за якою оцінюється успіх вирішення задач польоту, наприклад, маса ¶J корисного вантажу, - поточне значення част¶aП кової похідної J по куту атаки aП з урахуванням вищезазначених обмежень величини модуля aП. Вимірюють або визначають, наприклад по вимірах швидкості та висоти польоту, поточне значення швидкісного напору q, поточне максимальне допустиме значення просторового кута атаки виqa П Доп , де qaП значають як aП _ Доп - розДоп q рахункове максимальне допустиме значення добутку величин швидкісного напору q та просторового кута атаки. Визначають оптимальні значення кутів атаки aopt та ковзання bopt, наприö æ ¶J = 0÷ ç ¶a ÷ , де arg - аргумент рішенклад, як arg ç ÷ ç a opt , b opt ¶J = 0 a, b ÷ ç ø è ¶b ¶J ¶J , , - поточні ня системи рівнянь у дужках, ¶a ¶b значення часткових похідних J по кутах атаки a та ковзання b, відхиляють літальний апарат відносно набігаючого потоку на кут атаки ( ) ( ) ì 2 , якщо aopt + b2 £ aП _ Доп opt ïaopt ï a=í a opt 2 2 , якщо aopt + bopt > aП _ Доп ïaП _ Доп × 2 ï aopt + b2 opt î і кут ковзання ì 2 2 , якщо aopt + bopt £ aП _ Доп ïbopt ï b=í bopt , якщо a 2 + b2 > aП _ Доп ïaП _ Доп × opt opt 2 2 ï a opt + bopt î ¶J ¶J , визначають з урахуванням на¶a ¶b ведених залежностей для визначення кутів атаки a та ковзання b. Визначають оптимальні значення просторового кута атаки aП_opt та , причому 6 аеродинамічного крена jП_opt, наприклад, як æ ¶J ö = 0÷ ç ¶aП ç ÷ arg - аргумент ріarg ç ÷ , де a П _ opt , jП _ opt a П _ opt , jП _ opt ç ¶J = 0÷ ç ¶j ÷ è П ø ¶J ¶J шення рівняння у дужках, , = 0 , - поточні ¶aП ¶jП значення часткових похідних J по кутах атаки aП та аеродинамічного крена jП, відхиляють літальний апарат відносно набігаючого потоку на кут атаки ì ïaП _ opt , якщо aП _ opt £ aП _ Доп aП = í причому ïaП _ Доп , якщо aП _ opt > aП _ Доп , î ¶J визначають з урахуванням наведеної залеж¶aП ності для визначення просторового кута атаки для aП. aП Порівнюють з ~ aП _ Доп і, якщо ~ aП > aП _ Доп , то зменшують нахил літального апарата до напрямку набігаючого потоку до вели~ чини aП _ Доп . Поставлена задача вирішується тим, що в пристрої, який включає літальний апарат та його систему керування, на апараті встановлено щонайменше один датчик просторового кута атаки, інформаційні виходи якого зв'язано з додатковим відповідним входом системи керування. В якості J може бути вибрана цільова функція будь-якого виду: максимальна дальність польоту, максимальна висота орбіти, максимальна точність виведення, максимальна ймовірність виконання місії та ін. Серед режимів руху ЛА, особливо великого подовження, небезпечними є ті, що створюють надграничні поперечні навантаження. Умовою уникання таких режимів є додержання неперевищення в реальному польоті значень комплексу qaП . На практиці це забезпечується нульоДоп ( ) вим значенням aП_ПРОГ, така програма не дозволяє використовувати підйомну силу ЛА для підвищення його енергетики. Суть винаходу продемонстрована на кресленнях. На Фіг.1 зображено структурну схему системи керування за винаходом, на Фіг. 2 зображено кутове положення ЛА і його систему кутових параметрів. Заявлений винахід реалізується в такий спосіб. Система керування 1 літального апарату 2 інформаційно зв'язана з датчиком просторового кута атаки (ДПКА) 3 (Фіг.1). На Фіг.2 показано положення зв'язаної з ЛА системи координат Oxyz відносно швидкісної системи координат, пов'язаної з векто® ром швидкості v , визначається кутом атаки a 7 88038 кутом ковзання b або повним кутом атаки aП і кутом аеродинамічного (відносного) крену jП. З моменту старту до виходу із атмосфери і на протязі ділянок входів-виходів із неї СК 1 ЛА 2 вимірює за допомогою ДПКА 3 просторовий кут атаки aП і розраховує програму орієнтації апарата на весь польот або його ділянку (це типове для термінального методу керування). Термінальні методи керування формують програми орієнтації оптимальні за термінальними критеріями, а не за енергетичними, тобто такими, що забезпечують попадання в ціль. До старту може бути сформована опорна програма орієнтації, але такого роду програми не передбачають вихід на границі обмежень, бо це небезпечно. Тому програма орієнтації може бути тільки близькою до оптимальної по вибраному критерію оцінки успіху вирішення задач польоту, але не оптимальна, принаймні, для кожної даної реалізації збурень на протязі руху. Тільки визначення оптимальних для поточних умов руху параметрів керування може забезпечити оптимальність в конкретній реалізації. До того ж сучасні методи керування в атмосфері мають ту ваду, що формують програми керування без урахування обмежень на параметри руху. їх урахування відбувається вибором умов пуску ЛА. Необхідність виміру саме просторового кута атаки пояснюється тим, що обмеження qaП Доп ( ) [4, с.313] задається саме для цього кута. Комплекс qaП визначає, по суті, поперечне навантаДоп ( ) ження на корпус ЛА, а на напрямок дії сили обмежень, як правило, не накладають. СК 1 вимірює, наприклад, датчиком повітряного тиску типу ПВД або визначає по вимірах швидкості v (краще повітряної швидкості) та висоти польоту h поточне значення швидкісного напору q=p(h)v2/2. Далі визначаються оптимальні значення кутів атаки aopt та ковзання bopt із залежності æ ¶J ö = 0÷ ç ¶a ÷ , при цьому програма орієнтації ЛА arg ç ÷ ç a opt , b opt ¶J = 0 ÷ ç ¶b ø è 2 служить в якості опорної, оскільки вона оптимальна тільки для розрахункового випадку руху і не ураховує поточних та наступних збурень. Поточ¶J ¶J , забезпечує оптиманий характер значень ¶a ¶b льність керування ЛА на протязі всієї траєкторії руху для даної реалізації збурень ЛА та навколишнього середовища і навколишньої ситуації польоту. Важливо, що ці похідні визначають для a і b визначені, в свою чергу, заявленим тут чином, що забезпечує оптимальність рішення. Вибір a і b пояснюється тим, що ці кути найчастіше вибирають як керуючі змінні. Потім або одночасно з визначенням aopt, bopt визначається поточне максимальне допустиме значення просторового кута qa П Доп атаки aП _ Доп . Визначають q ( ) 8 ~ aП _ Доп aП _ Доп - Da С . = ~ Далі порівнюють ~ aП з aП _ Доп і, якщо aП > aП _ Доп (це можливо в разі зсуву вітру), то зменшують нахил літального апарата до напрямку набігаючого потоку до вели~ чини aП _ Доп , інакше розвертають літальний апарат відносно набігаючого потоку на кут атаки ~ ì 2 , якщо aopt + b2 £ aП _ Доп ïaopt opt ï a = í~ ~ a opt 2 , якщо aopt + b2 > aП _ Доп ïaП _ Доп × opt 2 ï a 2 + bopt opt î і кут ковзання ~ ì 2 2 , якщо aopt + bopt £ aП _ Доп ïbopt ï b = í~ ~ bopt , якщо a 2 + b2 > aП _ Доп ïaП _ Доп × opt opt 2 2 ï a opt + bopt î . Якщо в якості керуючих змінних вибрані aП та аеродинамічний крен, то рішення спрощується. ¶J = 0, Визначається aП_opt, із залежності arg ¶aП a П _ opt далі діють відповідно до винаходу і реалізують ~ ì ïaП _ opt , якщо aП _ opt £ aП _ Доп aП = í ~ ~ ïa î П _ Доп , якщо aП _ opt > aП _ Доп . Використання ДПКА [10] дозволяє спростити пристрій, оскільки він поєднує в собі два вимірювача орієнтації ЛА відносно набігаючого потоку кутів просторового кута атаки і аеродинамічного крена замість вимірювання кутів атаки і ковзання. Точність вимірювання зростає завдяки усуненню методичної помилки обчислення саме просторового кута атаки та зменшенню помилки прив'язки датчиків, скажімо, кутів атаки і ковзання до будівних осей ЛА. Підвищена точність забезпечує зростання ефективності маневру ЛА на граничних режимах. Дійсно, для забезпечення неперевищення обмеження qaП , виконання якого призводить Доп ( ) до обмеження просторового кута атаки aП_Доп, в польоті необхідно зменшити aП_Доп на величину помилки daП визначення aП, щоб гарантовано не перевищити aП_Доп. Ця помилка приводить до зниження ефективності виконання місії на величи¶J ну DJ = × daП . ¶aП Оцінки, проведені для ракети-носія (РН), з характеристиками, близькими до РН «Циклон-2», показують, що використання способу та пристрою, що заявляються, дозволяє підвищити її вантажопідйомність на 0,5...1% і більше. Таким чином, рішення, що заявляється, дозволяє забезпечити оптимальність траєкторії руху для будь-яких цільових функцій оцінки ефективності місії ЛА при одночасному забезпеченні його безпеки руху в умовах граничних навантажень. 9 88038 Джерела інформації 1) RU 2000105578/28 МПК 7 В 64 G 1/00, F 41 F 3/06. Способ запуска объектов на околоземную орбиту. 2) Игдалов И.М., Кучма Л.Д., Поляков Н.В., Шептун Ю.Д. Ракета как объект управления. - Д.: АРТ-ПРЕСС, 2004. - 544с. 3) Основы проектирования летательных аппаратов (транспортные системы). Учебник для технических вузов /В.П. Мишин, В.К. Безвербый, Б.М. Панкратов и др.; Под ред. В.П. Мишина. - М.: Машиностроение, 1985. - 360с., ил. 4) Герасюта Н.Ф., Новиков А.В., Белецкая Н.Г. Динамика полета. Основные задачи динамического проектирования ракет. - Днепропетровск: ГКБ "Южное", НПЦ "ЭКОСИ-Гидрофизика", 1998. 366с. 5) Сихарулидзе Ю.Г. Баллистика летательных аппаратов. М.: Наука, 1982. - 352с. Комп’ютерна верстка А. Крижанівський 10 6) А. С. СРСР 1838177 В 64 С 13/00. Способ управления движением космического аппарата на активном участке выведения на орбиту ИСЗ. 7) US 6024327 А 7 В 64 G 1/24.Компьютерная бортовая система управления пространственным положением и параметрами орбиты спутника //Изобретения стран мира, 2001. - Вып.33. - №2. С.18-19. 8) US 5400252 В 64 G 1/26. Система управления космического корабля //Изобретения стран мира, 1996. - Вып.33. - №4. - С.13 9) Проблемы навигации и управления при выведении на орбиту ТКА //Экспресс-информация. Астронавтика и ракетодинамика, 1979. - вып.48. №338. - С.19. 10) А. с. СРСР №728491, МПК3 G 01 Р 13/00, 1980. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for aircraft control
Автори англійськоюDron Mykola Mykhailovych, Khorolskyi Petro Heorhiiovych
Назва патенту російськоюСпособ управления летательным аппаратом и устройство для его осуществления
Автори російськоюДронь Николай Михайлович, Хорольский Петр Георгиевич
МПК / Мітки
МПК: B64G 1/24, F42B 15/01
Мітки: спосіб, пристрій, апаратом, керування, літальним, здійснення
Код посилання
<a href="https://ua.patents.su/5-88038-sposib-keruvannya-litalnim-aparatom-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування літальним апаратом і пристрій для його здійснення</a>
Спосіб керування літальним апаратом та зміни його аеродинамічного компонування і система керування
Номер патенту: 55253
Опубліковано: 15.03.2005
Автори: Семенов Леонід Антонович, Яковенко Петро Олексійович, Сайног Максим Борисович, Комендантова Людмила Степанівна, Доценко Борис Іванович, Кузьмін В'ячеслав Павлович, Косовенко Євген Вікторович, Егліт Микола Олександрович, Смішко Григорій Павлович
МПК: F42B 15/01
Мітки: компонування, зміни, апаратом, система, аеродинамічного, спосіб, керування, літальним
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Спосіб керування літальним апаратом та зміни його аеродинамічної компоновки і система керування
Номер патенту: 55253
Опубліковано: 17.03.2003
Автори: Смішко Григорій Павлович, Семенов Леонід Антонович, Косовенко Євген Вікторович, Доценко Борис Іванович, Егліт Микола Олександрович, Яковенко Петро Олексійович, Кузьмін В'ячеслав Павлович, Комендантова Людмила Степанівна, Сайног Максим Борисович
МПК: F42B 15/01
Мітки: компоновки, система, керування, зміни, аеродинамічної, літальним, апаратом, спосіб
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Спосіб керування обертовим літальним апаратом
Номер патенту: 64670
Опубліковано: 25.02.2008
Автори: Немчин Олександр Федорович, Семенов Леонід Антонович, Яковенко Петро Олексійович, Максимов Сергій Володимирович, Кузьмін В'ячеслав Павлович, Коробов Віталій Ілліч, Яковлев Віталій Васильович, Косовенко Євген Вікторович, Доценко Борис Іванович, Коростельов Олег Петрович
Мітки: спосіб, керування, обертовим, апаратом, літальним
Формула / Реферат:
Спосіб керування по тангажу і рисканню, що включає примусове обертання літального апарата (ЛА) навколо поздовжньої осі з необхідною частотою за рахунок заданого кута установки консолей крила, приймання і перетворення модульованого лазерного випромінювання в сигнали керування, пропорційні відхиленню ЛА від центральної лінії лазерного променя, і подачу сигналів на слідкувальні електричні рульові приводи, що мають пружинний імітатор додаткового...
Система керування космічним літальним апаратом
Номер патенту: 11982
Опубліковано: 16.01.2006
Автори: Гавриленко Олег Іванович, Ворончук Сергій Петрович
МПК: B64G 1/24
Мітки: система, літальним, космічним, керування, апаратом
Формула / Реферат:
Система керування космічним літальним апаратом, що складається з датчика кута, датчика кутових швидкостей, першого та другого масштабного блоків, послідовно з'єднаних підсилювача потужності, електродвигуна, ротора електродвигуна, тахометра, яка відрізняється тим, що додатково введено мікропроцесорний пристрій, перший і другий вхід якого з'єднані з виходами першого і другого масштабних блоків відповідно, вихід мікропроцесорного блока з'єднаний...
Система керування космічним літальним апаратом
Номер патенту: 18400
Опубліковано: 15.11.2006
Автори: Гордін Олександр Григорович, Малєва Людмила Сергіївна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літальним, система, космічним, керування, апаратом
Формула / Реферат:
Система керування космічним літальним апаратом (КЛА), що містить триступеневий гіроскопічний виконавчий орган, датчики моментів на осях підвісу внутрішньої та зовнішньої рами, датчики кута та кутової швидкості КЛА, виходи яких, через попередні перетворювачі, з'єднані з входами блока керування, перший підсилювач потужності підключений до датчика моменту на осі підвісу зовнішньої рами, яка відрізняється тим, що в неї введені два маховики,...
Попередній патент: Спосіб двоступінчастого окиснення аміаку
Наступний патент: Газорозрядна лампа високого тиску, що містить гетерний пристрій
Випадковий патент: Спосіб кування заготовок у чотирибойковому кувальному пристрої