Спосіб керування обертовим літальним апаратом
Номер патенту: 64670
Опубліковано: 25.02.2008
Автори: Немчин Олександр Федорович, Яковенко Петро Олексійович, Яковлев Віталій Васильович, Косовенко Євген Вікторович, Максимов Сергій Володимирович, Кузьмін В'ячеслав Павлович, Доценко Борис Іванович, Коростельов Олег Петрович, Коробов Віталій Ілліч, Семенов Леонід Антонович
Формула / Реферат
Спосіб керування по тангажу і рисканню, що включає примусове обертання літального апарата (ЛА) навколо поздовжньої осі з необхідною частотою за рахунок заданого кута установки консолей крила, приймання і перетворення модульованого лазерного випромінювання в сигнали керування, пропорційні відхиленню ЛА від центральної лінії лазерного променя, і подачу сигналів на слідкувальні електричні рульові приводи, що мають пружинний імітатор додаткового протидіючого моменту, який відрізняється тим, що необхідну для ефективного аеродинамічного керування швидкість ЛА підтримують за допомогою маршового ракетного двигуна, сопла якого розташовані на зовнішній обичайці корпусу попереду центра мас ЛА, а стійкість і задану точність наведення забезпечують за рахунок перебудови структури системи керування на ділянці роботи маршового двигуна шляхом введення обмеження заданого кута відхилення рулів і дискретної зміни параметрів - коефіцієнта передачі розімкнутої системи, рівня сигналу компенсації сили тяжіння і постійної часу фільтра, що вводять в обидва канали керування для подавлення коливань на власній частоті ЛА, причому коефіцієнт передачі і рівень сигналу компенсації сили тяжіння при ввімкненні маршового двигуна зменшують, а при його вимиканні збільшують, у той час, як постійну часу фільтра збільшують при запуску маршового двигуна і зменшують після закінчення його роботи відповідно до зміни власної частоти ЛА.
Текст
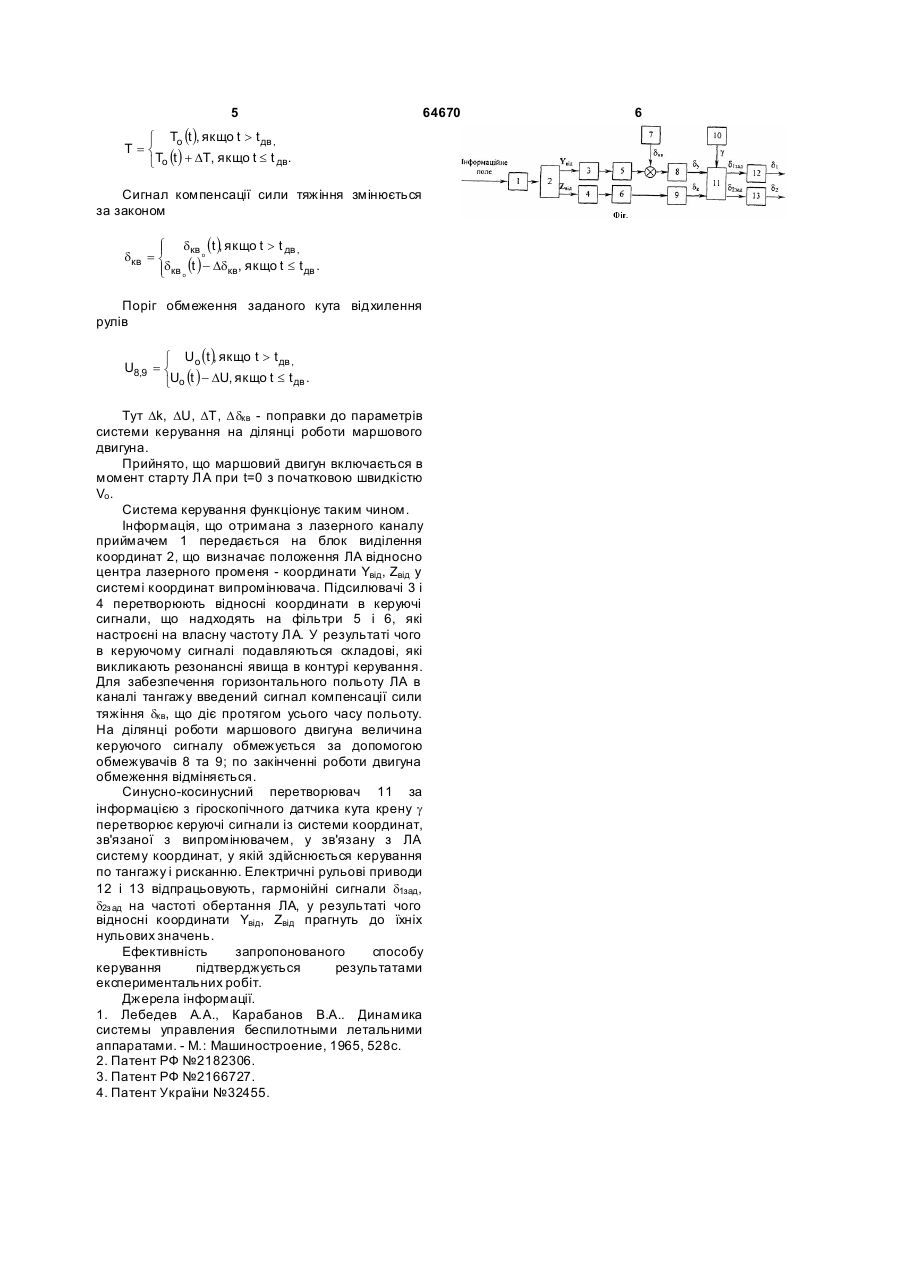
Спосіб керування по тангажу і рисканню, що включає примусове обертання літального апарата (ЛА) навколо поздовжньої осі з необхідною частотою за рахунок заданого кута установки консолей крила, приймання і перетворення модульованого лазерного випромінювання в сигнали керування, пропорційні відхиленню ЛА від центральної лінії лазерного променя, і подачу C2 2 (19) 1 3 64670 4 Відомий спосіб керування малостійкими і точність наведення забезпечують за рахунок хитливими в польоті ракетами, що обертаються по перебудови структури системи керування шляхом крену з заданою частотою, за допомогою введення обмеження заданого кута відхилення формування нелінійних команд керування у рулів на ділянці траєкторії з працюючим маршовим вигляді трипозиційних широтно-імпульсно двигуном і дискретної зміни параметрів системи модульованих сигналів, які подаються на приводи керування - коефіцієнта передачі, рівня сигналу аеродинамічних рулів [2]. Даний спосіб дозволяє компенсації сили тяжіння, постійної часу фільтра, забезпечити необхідну якість керування, однак що вводиться в обидва канали керування для через стрибкоподібний характер керуючих команд придушення коливань на власній частоті ЛА, істотно зростає енергоспоживання рульового причому коефіцієнт передачі і рівень сигналу приводу, що приводить до збільшення габаритнокомпенсації сили тяжіння при ввімкненні масових характеристик енергоприводного блоку. маршового двигуна зменшують, а при вимиканні Відомий спосіб керування обертовим збільшують, у той час як постійну часу фільтру снарядом, при якому зміна кількості рулів збільшують при запуску маршового двигуна і керування здійснюють послідовним попарним зменшують після закінчення його роботи розкриттям і приведенням у дію протилежних відповідно до зміни власної частоти ЛА. щодо поздовжньої осі снаряда рулів у момент Проведені дослідження показали, що при досягнення снарядом визначеної швидкості [3]. ввімкненні маршового ракетного двигуна, сопла Даний спосіб дозволяє змінювати ефективність якого розташовані попереду центра мас ЛА, органів керування, але не враховує впливу знижується запас поздовжньої статичної стійкості і струменів тягнучого маршового двигуна ракети на зменшується власна частота коливань по куту її аеродинамічні характеристики. атаки, у результаті чого обертовий ЛА рухається Також відомий спосіб керування ЛА [4] по по траєкторії у вигляді спіралі щодо центра тангажу і рисканню в лазерному інформаційному лазерного променя. При цьому зростає коефіцієнт полі з використанням реверсивного приводу передачі ЛА як об'єкта керування, що знижує обертальної дії (слідкуючого електроприводу), що запаси стійкості в системі керування по амплітуді і має імітатор додаткового моменту пружинного чи фазі. В цьому випадку задані кути відхилення торсионного типу. рулів, які закладаються, можуть вивести ЛА на Такий спосіб дозволяє керувати ЛА, що має неприпустимо великі кути атаки, що приводять до фотоприймач лазерного випромінювання в його втрати стійкості. У результаті зміни власної хвостовій частині, тягнучий маршовий ракетний частоти ЛА фільтр, який настроюється без двигун, підвищує швидкодію реверсивного врахування впливу стр уменів маршового двигуна, електропривода рулів і забезпечує динамічну не виконує покладені на нього функції. стійкість ЛА шля хом перекладки рулів з частотою Тому для забезпечення стійкості і керованості його обертання відносно поздовжньої осі. ЛА необхідно дискретно змінювати параметри Однак даний спосіб не дає конкретного системи керування на ділянці його руху з технічного рішення по формуванню структури працюючим маршовим двигуном. керування і зміні параметрів системи керування на На Фіг. показана структурна схема системи всій траєкторії польоту, що включає ділянки руху керування, що реалізує запропонований спосіб як з вимкненим, так і з працюючим тягнучим керування. Вона містить приймач лазерного маршовим двигуном. випромінювання 1, блок виділення координат 2, Тому актуальною являється задача підсилювачі 3 і 4, фільтри «пробки» 5 і 6 у каналах забезпечення стійкості обертового по крену ЛА, тангажу і рискання, блок формування компенсації керованого в лазерному промені, що має сили тяжіння 7, обмежувачі заданого кута слідкуючий електропривод рулів, підвищення відхилення рулів зі змінним порогом 8 і 9, точності й ефективності керування в умовах зміни гіроскопічний датчик кута крену 10, синусноаеродинамічних характеристик через наявність чи косинусний перетворювач 11 і електричні рульові відсутність струменевого обтікання від маршового приводи 12 і 13. ракетного двигуна, шляхом відповідного Підсилювачі 3 і 4 мають змінний коефіцієнт настроювання системи керування. передачі Поставлена мета досягається тим, що в способі керування по тангажу і рисканню, що ì ko (t ), якщо t > t дв , полягає в примусовому обертанні ЛА відносно k 3, 4 = í поздовжньої осі з необхідною частотою за рахунок îk o (t ) - Dk, якщо t £ t дв . заданого кута установки консолей крила, у прийомі і перетворенні модульованого лазерного випромінювання в сигнали керування, пропорційні відхиленню ЛА від центральної лінії лазерного променя, їх подачі на слідкуючий електричний рульовий привід, що має пружинний імітатор додаткового протидіючого моменту, необхідн у для ефективного аеродинамічного керування ЛА швидкість підтримують за допомогою тягнучого маршового ракетного двигуна, сопла якого розташовані на зовнішній обичайці корпуса попереду центра мас ЛА, а стійкість і задану Передатна функція фільтра «пробка» має вигляд W5, 6 = T2p 2 + 2T x1p + 1 T 2p2 + 2 Tx2p + 1 де xi - коефіцієнт демпфування, Т - постійна часу фільтру "пробка", 5 64670 ì To (t ), якщо t > t дв , T=í îTo (t ) + DT, якщо t £ t дв. Сигнал компенсації сили тяжіння змінюється за законом ì dкв о (t ), якщо t > t дв , ï dкв = í ïdкв о (t ) - Ddкв, якщо t £ t дв . î Поріг обмеження заданого кута відхилення рулів ì U o (t ), якщо t > t дв , U8,9 = í îUo (t ) - DU, якщо t £ t дв . Тут Dk, DU, DΤ, Ddкв - поправки до параметрів системи керування на ділянці роботи маршового двигуна. Прийнято, що маршовий двигун включається в момент старту ЛА при t=0 з початковою швидкістю Vo . Система керування функціонує таким чином. Інформація, що отримана з лазерного каналу приймачем 1 передається на блок виділення координат 2, що визначає положення ЛА відносно центра лазерного променя - координати Yвід, Zвід у системі координат випромінювача. Підсилювачі 3 і 4 перетворюють відносні координати в керуючі сигнали, що надходять на фільтри 5 і 6, які настроєні на власну частоту ЛА. У результаті чого в керуючому сигналі подавляються складові, які викликають резонансні явища в контурі керування. Для забезпечення горизонтального польоту ЛА в каналі тангажу введений сигнал компенсації сили тяжіння dкв, що діє протягом усього часу польоту. На ділянці роботи маршового двигуна величина керуючого сигналу обмежується за допомогою обмежувачів 8 та 9; по закінченні роботи двигуна обмеження відміняється. Синусно-косинусний перетворювач 11 за інформацією з гіроскопічного датчика кута крену g перетворює керуючі сигнали із системи координат, зв'язаної з випромінювачем, у зв'язану з ЛА систему координат, у якій здійснюється керування по тангажу і рисканню. Електричні рульові приводи 12 і 13 відпрацьовують, гармонійні сигнали d1зад, d2з ад на частоті обертання ЛА, у результаті чого відносні координати Yвід, Zвід прагнуть до їхніх нульових значень. Ефективність запропонованого способу керування підтверджується результатами експериментальних робіт. Джерела інформації. 1. Лебедев А.А., Карабанов В.А.. Динамика системы управления беспилотными летальними аппаратами. - Μ.: Машиностроение, 1965, 528с. 2. Патент РФ №2182306. 3. Патент РФ №2166727. 4. Патент України №32455. 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of rotary aircraft
Автори англійськоюSemenov Leonid Antonovych, Korosteliov Oleh Petrovych, Yakovenko Petro Oleksiiovych, Dotsenko Borys Ivanovych, Kuzmin Viacheslav Pavlovych, Kosovenko Yevhen Viktorovych, Nemchyn Oleksandr Fedorovych, Yakovlev Vitalii Vasyliovych, Korobov Vitalii Illich, Maksimov Sergiy Volodimirovych
Назва патенту російськоюСпособ управления вращающимся летательным аппаратом
Автори російськоюСеменов Леонид Антонович, Коростелев Олег Петрович, Яковенко Петр Алексеевич, Доценко Борис Иванович, Кузьмин Вячеслав Павлович, Косовенко Евгений Викторович, Немчин Александр Федорович, Яковлев Виталий Васильевич, Коробов Виталий Ильич, МАКСИМОВ СЕРГЕЙ ВЛАДИМИРОВИЧ
МПК / Мітки
Мітки: апаратом, обертовим, керування, літальним, спосіб
Код посилання
<a href="https://ua.patents.su/3-64670-sposib-keruvannya-obertovim-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування обертовим літальним апаратом</a>
Система керування обертовим літальним апаратом
Номер патенту: 64669
Опубліковано: 25.02.2008
Автори: Семенов Леонід Антонович, Максимов Сергій Володимирович, Немчин Олександр Федорович, Яковенко Петро Олексійович, Косовенко Євген Вікторович, Доценко Борис Іванович, Коробов Віталій Ілліч, Кузьмін В'ячеслав Павлович, Коростельов Олег Петрович, Яковлев Віталій Васильович
МПК: F42B 15/01
Мітки: літальним, апаратом, керування, система, обертовим
Формула / Реферат:
Система керування, яка містить горизонтальний і вертикальний канали керування, що включають два коригувальних фільтри, два підсилювачі з керуючими входами, формувач сигналу компенсації сили тяжіння, перший суматор, входи якого підключені до виходу другого коригувального фільтра і формувача сигналу компенсації сили тяжіння, а вихід - до входу другого підсилювача, синусно-косинусний перетворювач і гіроскоп крену з відповідними зв'язками,...
Спосіб керування літальним апаратом та зміни його аеродинамічного компонування і система керування
Номер патенту: 55253
Опубліковано: 15.03.2005
Автори: Комендантова Людмила Степанівна, Кузьмін В'ячеслав Павлович, Сайног Максим Борисович, Смішко Григорій Павлович, Доценко Борис Іванович, Семенов Леонід Антонович, Косовенко Євген Вікторович, Яковенко Петро Олексійович, Егліт Микола Олександрович
МПК: F42B 15/01
Мітки: спосіб, зміни, літальним, керування, аеродинамічного, компонування, апаратом, система
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Спосіб керування літальним апаратом та зміни його аеродинамічної компоновки і система керування
Номер патенту: 55253
Опубліковано: 17.03.2003
Автори: Яковенко Петро Олексійович, Сайног Максим Борисович, Косовенко Євген Вікторович, Семенов Леонід Антонович, Егліт Микола Олександрович, Доценко Борис Іванович, Кузьмін В'ячеслав Павлович, Смішко Григорій Павлович, Комендантова Людмила Степанівна
МПК: F42B 15/01
Мітки: апаратом, зміни, компоновки, система, керування, аеродинамічної, літальним, спосіб
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Система керування космічним літальним апаратом

Номер патенту: 67029
Опубліковано: 15.06.2004
Автори: Батаєв Віктор Олександрович, Овсяннікова Ірина Валеріївна, Погудін Андрій Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літальним, космічним, апаратом, керування, система
Формула / Реферат:
Система керування космічним літальним апаратом, що містить датчик кута та датчик кутових швидкостей, які з'єднані через перший і другий масштабні блоки з формувачем закону керування, і підсилювач потужності, яка відрізняється тим, що в неї введені послідовно включені інтегратор, порівнюючий пристрій, з'єднаний через підсилювач потужності з ротором електродвигуна, на роторі встановлений тахометр, який з'єднаний з другим входом порівнюючого...
Спосіб управління літальним апаратом
Номер патенту: 32455
Опубліковано: 15.12.2000
Автори: Коростельов Олег Петрович, Кузьмін В'ячеслав Павлович, Косовенко Євген Вікторович, Бондарчук Павло Степанович, Смішко Григорій Павлович, Шепелев Юрій Іванович, Яковенко Петро Олексійович, Доценко Борис Іванович, Корольов Анатолій Миколайович, Семенов Леонід Антонович
Мітки: управління, літальним, спосіб, апаратом
Текст:
...значень коефіцієнта шар нірного моменту (наприклад, за допомогою вибору геометричних параметрів руля та розташування, осі його повороту), моменту інерції рульового приводу з рулями відносно їх осі повороту, частоти обертання літального апарата навколо його подовженої осі (наприклад, за допомогою початкового кута установки крил або сопел двигуна) та моменту уз годжувального імітатора додаткового моменту. Одна з можливи х конструктивних схем...
Попередній патент: Система керування обертовим літальним апаратом
Наступний патент: Спосіб і пристрій для перевантаження та контролю герметичності тепловидільного елемента реактора з рідким теплоносієм
Випадковий патент: Датчик