М’язовий привід

Формула / Реферат
М'язовий привід, що містить раму (5) і укріплені на ній принаймні одну привідну зірочку (6) або шків, з'єднані з привідним валом (7) через обгінну муфту (8), та іншу опорну зірочку (16), охоплені протилежними гілками гнучкої тяги, наприклад ланцюга (9, 10), з розташованим між ними здійснюючим зворотно-поступальні рухи шатуном (14), встановленим на важелі (12) з рукояткою (13) для перетворення м'язової сили (Р), який відрізняється тим, що має вузол (4), в якому на шатуні (14) укріплені консолі (19), на них встановлені охоплюючі протилежні гілки (9, 10) ланцюга по одному обмежувачу (20, 21) і по одній зірочці (22, 23) з тріскачкою (24, 25) як обгінною муфтою, що поперемінно замикаються при зміні напрямку ходу шатуна (14).
Текст
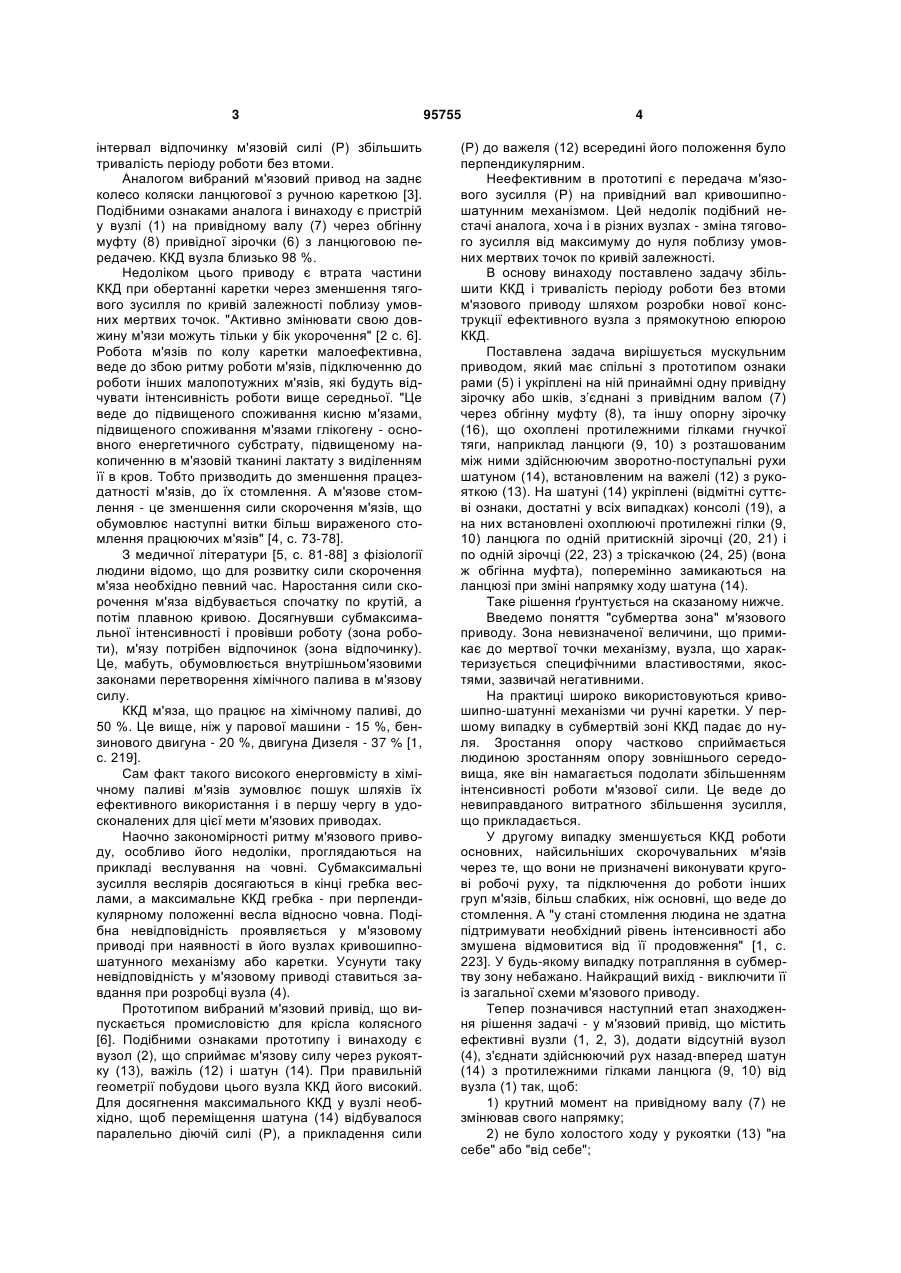
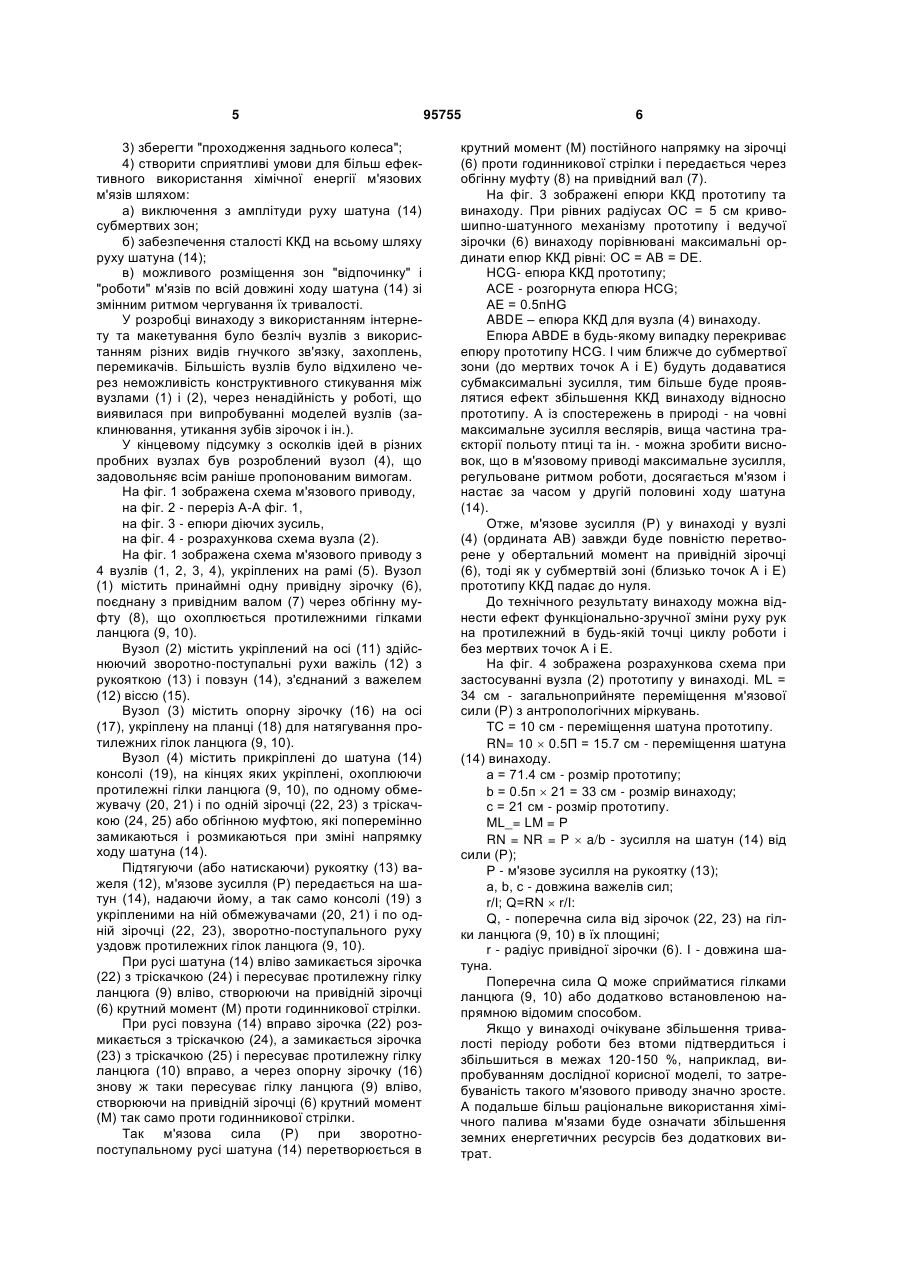
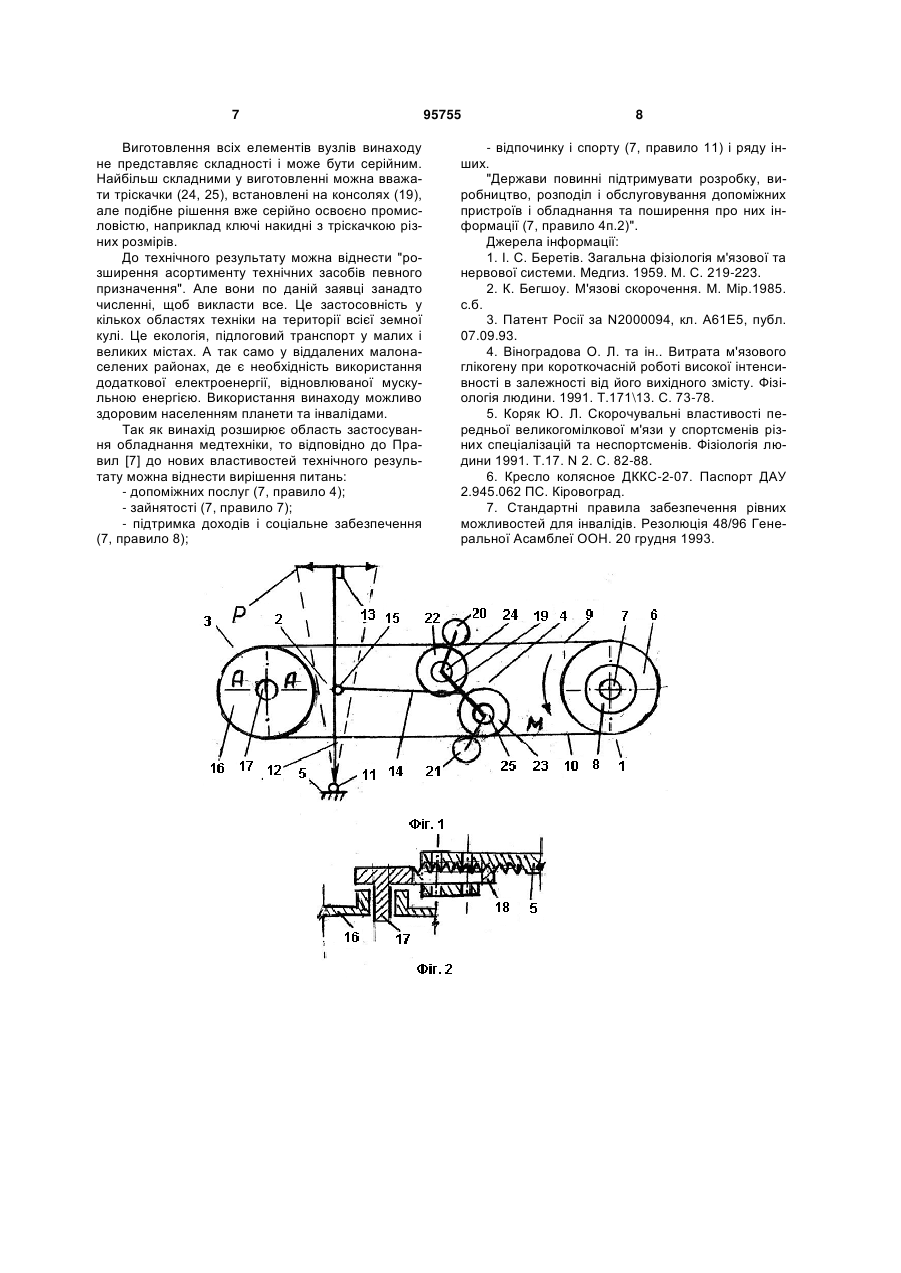
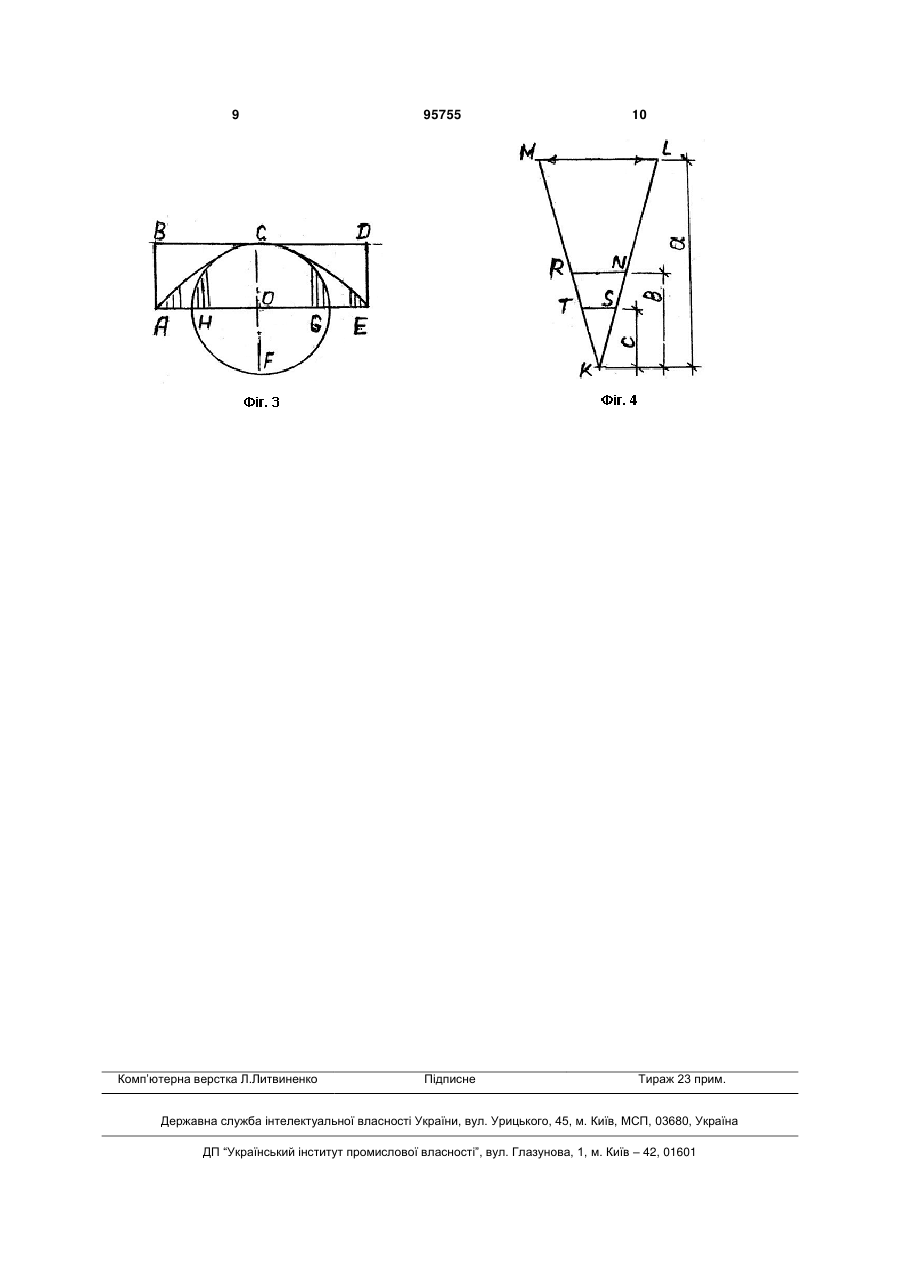
М'язовий привід, що містить раму (5) і укріплені на ній принаймні одну привідну зірочку (6) або 3 інтервал відпочинку м'язовій силі (Р) збільшить тривалість періоду роботи без втоми. Аналогом вибраний м'язовий привод на заднє колесо коляски ланцюгової з ручною кареткою [3]. Подібними ознаками аналога і винаходу є пристрій у вузлі (1) на привідному валу (7) через обгінну муфту (8) привідної зірочки (6) з ланцюговою передачею. ККД вузла близько 98 %. Недоліком цього приводу є втрата частини ККД при обертанні каретки через зменшення тягового зусилля по кривій залежності поблизу умовних мертвих точок. "Активно змінювати свою довжину м'язи можуть тільки у бік укорочення" [2 с. 6]. Робота м'язів по колу каретки малоефективна, веде до збою ритму роботи м'язів, підключенню до роботи інших малопотужних м'язів, які будуть відчувати інтенсивність роботи вище середньої. "Це веде до підвищеного споживання кисню м'язами, підвищеного споживання м'язами глікогену - основного енергетичного субстрату, підвищеному накопиченню в м'язовій тканині лактату з виділенням її в кров. Тобто призводить до зменшення працездатності м'язів, до їх стомлення. А м'язове стомлення - це зменшення сили скорочення м'язів, що обумовлює наступні витки більш вираженого стомлення працюючих м'язів" [4, с. 73-78]. З медичної літератури [5, с. 81-88] з фізіології людини відомо, що для розвитку сили скорочення м'яза необхідно певний час. Наростання сили скорочення м'яза відбувається спочатку по крутій, а потім плавною кривою. Досягнувши субмаксимальної інтенсивності і провівши роботу (зона роботи), м'язу потрібен відпочинок (зона відпочинку). Це, мабуть, обумовлюється внутрішньом'язовими законами перетворення хімічного палива в м'язову силу. ККД м'яза, що працює на хімічному паливі, до 50 %. Це вище, ніж у парової машини - 15 %, бензинового двигуна - 20 %, двигуна Дизеля - 37 % [1, с. 219]. Сам факт такого високого енерговмісту в хімічному паливі м'язів зумовлює пошук шляхів їх ефективного використання і в першу чергу в удосконалених для цієї мети м'язових приводах. Наочно закономірності ритму м'язового приводу, особливо його недоліки, проглядаються на прикладі веслування на човні. Субмаксимальні зусилля веслярів досягаються в кінці гребка веслами, а максимальне ККД гребка - при перпендикулярному положенні весла відносно човна. Подібна невідповідність проявляється у м'язовому приводі при наявності в його вузлах кривошипношатунного механізму або каретки. Усунути таку невідповідність у м'язовому приводі ставиться завдання при розробці вузла (4). Прототипом вибраний м'язовий привід, що випускається промисловістю для крісла колясного [6]. Подібними ознаками прототипу і винаходу є вузол (2), що сприймає м'язову силу через рукоятку (13), важіль (12) і шатун (14). При правильній геометрії побудови цього вузла ККД його високий. Для досягнення максимального ККД у вузлі необхідно, щоб переміщення шатуна (14) відбувалося паралельно діючій силі (Р), а прикладення сили 95755 4 (Р) до важеля (12) всередині його положення було перпендикулярним. Неефективним в прототипі є передача м'язового зусилля (Р) на привідний вал кривошипношатунним механізмом. Цей недолік подібний нестачі аналога, хоча і в різних вузлах - зміна тягового зусилля від максимуму до нуля поблизу умовних мертвих точок по кривій залежності. В основу винаходу поставлено задачу збільшити ККД і тривалість періоду роботи без втоми м'язового приводу шляхом розробки нової конструкції ефективного вузла з прямокутною епюрою ККД. Поставлена задача вирішується мускульним приводом, який має спільні з прототипом ознаки рами (5) і укріплені на ній принаймні одну привідну зірочку або шків, з’єднані з привідним валом (7) через обгінну муфту (8), та іншу опорну зірочку (16), що охоплені протилежними гілками гнучкої тяги, наприклад ланцюги (9, 10) з розташованим між ними здійснюючим зворотно-поступальні рухи шатуном (14), встановленим на важелі (12) з рукояткою (13). На шатуні (14) укріплені (відмітні суттєві ознаки, достатні у всіх випадках) консолі (19), а на них встановлені охоплюючі протилежні гілки (9, 10) ланцюга по одній притискній зірочці (20, 21) і по одній зірочці (22, 23) з тріскачкою (24, 25) (вона ж обгінна муфта), поперемінно замикаються на ланцюзі при зміні напрямку ходу шатуна (14). Таке рішення ґрунтується на сказаному нижче. Введемо поняття "субмертва зона" м'язового приводу. Зона невизначеної величини, що примикає до мертвої точки механізму, вузла, що характеризується специфічними властивостями, якостями, зазвичай негативними. На практиці широко використовуються кривошипно-шатунні механізми чи ручні каретки. У першому випадку в субмертвій зоні ККД падає до нуля. Зростання опору частково сприймається людиною зростанням опору зовнішнього середовища, яке він намагається подолати збільшенням інтенсивності роботи м'язової сили. Це веде до невиправданого витратного збільшення зусилля, що прикладається. У другому випадку зменшується ККД роботи основних, найсильніших скорочувальних м'язів через те, що вони не призначені виконувати кругові робочі руху, та підключення до роботи інших груп м'язів, більш слабких, ніж основні, що веде до стомлення. А "у стані стомлення людина не здатна підтримувати необхідний рівень інтенсивності або змушена відмовитися від її продовження" [1, с. 223]. У будь-якому випадку потрапляння в субмертву зону небажано. Найкращий вихід - виключити її із загальної схеми м'язового приводу. Тепер позначився наступний етап знаходження рішення задачі - у м'язовий привід, що містить ефективні вузли (1, 2, 3), додати відсутній вузол (4), з'єднати здійснюючий рух назад-вперед шатун (14) з протилежними гілками ланцюга (9, 10) від вузла (1) так, щоб: 1) крутний момент на привідному валу (7) не змінював свого напрямку; 2) не було холостого ходу у рукоятки (13) "на себе" або "від себе"; 5 3) зберегти "проходження заднього колеса"; 4) створити сприятливі умови для більш ефективного використання хімічної енергії м'язових м'язів шляхом: а) виключення з амплітуди руху шатуна (14) субмертвих зон; б) забезпечення сталості ККД на всьому шляху руху шатуна (14); в) можливого розміщення зон "відпочинку" і "роботи" м'язів по всій довжині ходу шатуна (14) зі змінним ритмом чергування їх тривалості. У розробці винаходу з використанням інтернету та макетування було безліч вузлів з використанням різних видів гнучкого зв'язку, захоплень, перемикачів. Більшість вузлів було відхилено через неможливість конструктивного стикування між вузлами (1) і (2), через ненадійність у роботі, що виявилася при випробуванні моделей вузлів (заклинювання, утикання зубів зірочок і ін.). У кінцевому підсумку з осколків ідей в різних пробних вузлах був розроблений вузол (4), що задовольняє всім раніше пропонованим вимогам. На фіг. 1 зображена схема м'язового приводу, на фіг. 2 - переріз А-А фіг. 1, на фіг. 3 - епюри діючих зусиль, на фіг. 4 - розрахункова схема вузла (2). На фіг. 1 зображена схема м'язового приводу з 4 вузлів (1, 2, 3, 4), укріплених на рамі (5). Вузол (1) містить принаймні одну привідну зірочку (6), поєднану з привідним валом (7) через обгінну муфту (8), що охоплюється протилежними гілками ланцюга (9, 10). Вузол (2) містить укріплений на осі (11) здійснюючий зворотно-поступальні рухи важіль (12) з рукояткою (13) і повзун (14), з'єднаний з важелем (12) віссю (15). Вузол (3) містить опорну зірочку (16) на осі (17), укріплену на планці (18) для натягування протилежних гілок ланцюга (9, 10). Вузол (4) містить прикріплені до шатуна (14) консолі (19), на кінцях яких укріплені, охоплюючи протилежні гілки ланцюга (9, 10), по одному обмежувачу (20, 21) і по одній зірочці (22, 23) з тріскачкою (24, 25) або обгінною муфтою, які поперемінно замикаються і розмикаються при зміні напрямку ходу шатуна (14). Підтягуючи (або натискаючи) рукоятку (13) важеля (12), м'язове зусилля (Р) передається на шатун (14), надаючи йому, а так само консолі (19) з укріпленими на ній обмежувачами (20, 21) і по одній зірочці (22, 23), зворотно-поступального руху уздовж протилежних гілок ланцюга (9, 10). При русі шатуна (14) вліво замикається зірочка (22) з тріскачкою (24) і пересуває протилежну гілку ланцюга (9) вліво, створюючи на привідній зірочці (6) крутний момент (М) проти годинникової стрілки. При русі повзуна (14) вправо зірочка (22) розмикається з тріскачкою (24), а замикається зірочка (23) з тріскачкою (25) і пересуває протилежну гілку ланцюга (10) вправо, а через опорну зірочку (16) знову ж таки пересуває гілку ланцюга (9) вліво, створюючи на привідній зірочці (6) крутний момент (М) так само проти годинникової стрілки. Так м'язова сила (Р) при зворотнопоступальному русі шатуна (14) перетворюється в 95755 6 крутний момент (М) постійного напрямку на зірочці (6) проти годинникової стрілки і передається через обгінну муфту (8) на привідний вал (7). На фіг. 3 зображені епюри ККД прототипу та винаходу. При рівних радіусах ОС = 5 см кривошипно-шатунного механізму прототипу і ведучої зірочки (6) винаходу порівнювані максимальні ординати епюр ККД рівні: ОС = АВ = DE. HCG- епюра ККД прототипу; АСЕ - розгорнута епюра HCG; AE = 0.5пHG ABDE – епюра ККД для вузла (4) винаходу. Епюра ABDE в будь-якому випадку перекриває епюру прототипу HCG. І чим ближче до субмертвої зони (до мертвих точок А і Е) будуть додаватися субмаксимальні зусилля, тим більше буде проявлятися ефект збільшення ККД винаходу відносно прототипу. А із спостережень в природі - на човні максимальне зусилля веслярів, вища частина траєкторії польоту птиці та ін. - можна зробити висновок, що в м'язовому приводі максимальне зусилля, регульоване ритмом роботи, досягається м'язом і настає за часом у другій половині ходу шатуна (14). Отже, м'язове зусилля (Р) у винаході у вузлі (4) (ордината АВ) завжди буде повністю перетворене у обертальний момент на привідній зірочці (6), тоді як у субмертвій зоні (близько точок А і Е) прототипу ККД падає до нуля. До технічного результату винаходу можна віднести ефект функціонально-зручної зміни руху рук на протилежний в будь-якій точці циклу роботи і без мертвих точок А і Е. На фіг. 4 зображена розрахункова схема при застосуванні вузла (2) прототипу у винаході. ML = 34 см - загальноприйняте переміщення м'язової сили (Р) з антропологічних міркувань. ТС = 10 см - переміщення шатуна прототипу. RN= 10 0.5П = 15.7 см - переміщення шатуна (14) винаходу. а = 71.4 см - розмір прототипу; b = 0.5п 21 = 33 см - розмір винаходу; с = 21 см - розмір прототипу. ML_= LM = Р RN = NR = P a/b - зусилля на шатун (14) від сили (Р); Р - м'язове зусилля на рукоятку (13); а, b, с - довжина важелів сил; r/І; Q=RN r/І: Q, - поперечна сила від зірочок (22, 23) на гілки ланцюга (9, 10) в їх площині; r - радіус привідної зірочки (6). І - довжина шатуна. Поперечна сила Q може сприйматися гілками ланцюга (9, 10) або додатково встановленою напрямною відомим способом. Якщо у винаході очікуване збільшення тривалості періоду роботи без втоми підтвердиться і збільшиться в межах 120-150 %, наприклад, випробуванням дослідної корисної моделі, то затребуваність такого м'язового приводу значно зросте. А подальше більш раціональне використання хімічного палива м'язами буде означати збільшення земних енергетичних ресурсів без додаткових витрат. 7 Виготовлення всіх елементів вузлів винаходу не представляє складності і може бути серійним. Найбільш складними у виготовленні можна вважати тріскачки (24, 25), встановлені на консолях (19), але подібне рішення вже серійно освоєно промисловістю, наприклад ключі накидні з тріскачкою різних розмірів. До технічного результату можна віднести "розширення асортименту технічних засобів певного призначення". Але вони по даній заявці занадто численні, щоб викласти все. Це застосовність у кількох областях техніки на території всієї земної кулі. Це екологія, підлоговий транспорт у малих і великих містах. А так само у віддалених малонаселених районах, де є необхідність використання додаткової електроенергії, відновлюваної мускульною енергією. Використання винаходу можливо здоровим населенням планети та інвалідами. Так як винахід розширює область застосування обладнання медтехніки, то відповідно до Правил [7] до нових властивостей технічного результату можна віднести вирішення питань: - допоміжних послуг (7, правило 4); - зайнятості (7, правило 7); - підтримка доходів і соціальне забезпечення (7, правило 8); 95755 8 - відпочинку і спорту (7, правило 11) і ряду інших. "Держави повинні підтримувати розробку, виробництво, розподіл і обслуговування допоміжних пристроїв і обладнання та поширення про них інформації (7, правило 4п.2)". Джерела інформації: 1. І. С. Беретів. Загальна фізіологія м'язової та нервової системи. Медгиз. 1959. М. С. 219-223. 2. К. Бегшоу. М'язові скорочення. М. Мір.1985. с.б. 3. Патент Росії за N2000094, кл. А61Е5, публ. 07.09.93. 4. Віноградова О. Л. та ін.. Витрата м'язового глікогену при короткочасній роботі високої інтенсивності в залежності від його вихідного змісту. Фізіологія людини. 1991. Т.171\13. С. 73-78. 5. Коряк Ю. Л. Скорочувальні властивості передньої великогомілкової м'язи у спортсменів різних спеціалізацій та неспортсменів. Фізіологія людини 1991. Т.17. N 2. С. 82-88. 6. Кресло колясное ДККС-2-07. Паспорт ДАУ 2.945.062 ПС. Кіровоград. 7. Стандартні правила забезпечення рівних можливостей для інвалідів. Резолюція 48/96 Генеральної Асамблеї ООН. 20 грудня 1993. 9 Комп’ютерна верстка Л.Литвиненко 95755 Підписне 10 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMuscle actuator
Автори англійськоюSavchenko Volodymyr Oleksandrovych
Назва патенту російськоюМускульный привод
Автори російськоюСавченко Владимир Александрович
МПК / Мітки
МПК: B62M 1/00, A61G 5/00, F16H 29/02, F03G 5/00
Код посилання
<a href="https://ua.patents.su/5-95755-myazovijj-privid.html" target="_blank" rel="follow" title="База патентів України">М’язовий привід</a>
Привід педально-ексцентриковий ланцюговий
Номер патенту: 74857
Опубліковано: 15.02.2006
Автори: Онищенко Володимир Євгенович, Онищенко Євген Євгенович (молодший), Онищенко Євген Євгенович
МПК: B62M 11/00
Мітки: ланцюговий, педально-ексцентриковий, привід
Формула / Реферат:
1. Привід педально-ексцентриковий ланцюговий, що містить привідну зірочку, посаджену на один вал з педалями, ведену зірочку, ланцюг, накинутий на них, та підпружинений натяжний пристрій на неробочій гілці ланцюга, який відрізняється тим, що на робочій гілці ланцюга встановлена ексцентрикова зірочка із кількістю зубів удвоє меншою, ніж у привідній зірочці таким чином, що прогин ланцюга є найменшим у момент вертикального розташування...
Привід круглов`язальної машини
Номер патенту: 25003
Опубліковано: 25.07.2007
Автори: Ловейкіна Світлана Олексіївна, Павленко Георгій Іванович, Піпа Борис Федорович
МПК: D04B 15/94
Мітки: машини, круглов'язальної, привід
Формула / Реферат:
Привід круглов'язальної машини, що містить електродвигун, клинопасову передачу, ведучий шків якої жорстко встановлений на валу електродвигуна, зубчасту передачу, ведуча шестірня якої встановлена на валу веденого шківа клинопасової передачі, та вертикальний привідний вал, на якому встановлено зубчасте колесо зубчастої передачі, кінематично за допомогою передач з'єднаний з механізмами в'язання та товароприйому, який відрізняється тим, що...
Привід круглов`язальної машини

Номер патенту: 26195
Опубліковано: 10.09.2007
Автори: Хомяк Олег Миколайович, Піпа Борис Федорович, Марченко Анатолій Іванович
МПК: D04B 15/94
Мітки: машини, круглов'язальної, привід
Формула / Реферат:
Привід круглов’язальної машини, що містить кінематично з’єднані між собою електродвигун та вертикальний привідний вал, на кінцях якого жорстко закріплені ведучі елементи, кінематично з’єднані з веденими елементами передач, відповідно, механізму в’язання та механізму товароприйому, який відрізняється тим, що кінематичні з’єднання виконані у формі ланцюгових передач.
Привід круглов`язальної машини
Номер патенту: 26271
Опубліковано: 10.09.2007
Автори: Марченко Анатолій Іванович, Піпа Борис Федорович, Павленко Георгій Іванович
МПК: D04B 15/94
Мітки: привід, круглов'язальної, машини
Формула / Реферат:
1. Привід круглов'язальної машини, що містить з'єднані між собою за допомогою механічних передач електродвигун та вертикальний привідний вал, на кінцях якого жорстко закріплені ведучі елементи, кінематично з'єднані з веденими елементами передач, відповідно, механізму в'язання та механізму товароприйому, який відрізняється тим, що одна із механічних передач додатково містить демпфірувальний пристрій з пружними елементами, встановлений на...
Привід круглов’язальної машини

Номер патенту: 61172
Опубліковано: 11.07.2011
Автори: Павленко Георгій Іванович, Піпа Борис Федорович, Марченко Анатолій Іванович
МПК: D04B 15/94
Мітки: привід, круглов'язальної, машини
Формула / Реферат:
Привід круглов'язальної машини, що містить електродвигун, кінематично з'єднаний з вертикальним приводним валом, на кінцях якого жорстко закріплені циліндричні шестерні для з'єднання верхньої з них з зубчастим колесом механізму в'язання, який відрізняється тим, що обладнаний додатковою шестернею, з'єднаною з вертикальним приводним валом і з зубчастим колесом механізму в'язання та розташованою діаметрально протилежно циліндричній шестерні.
Попередній патент: Пристрій для переорієнтування сформованих пакетів
Наступний патент: Механізм кріплення горловини пластикової пляшки до зливного каналу пристрою для ручного розливу пінних та/або газованих напоїв
Випадковий патент: Хвильова енергетична установка