Спосіб вимірювання інваріантного коефіцієнта стійкості
Номер патенту: 97804
Опубліковано: 10.04.2015
Автори: Бондарюк Денис Володимирович, Філинюк Микола Антонович, Чехместрук Роман Юрійович

Формула / Реферат
Спосіб вимірювання інваріантного коефіцієнта стійкості, що включає вимірювання вхідного ![]() та вихідного
та вихідного ![]() імітансів вимірювального чотириполюсника при довільних перетворювальних імітансах, який відрізняється тим, що вимірюють за допомогою вимірювальної лінії два значення вихідного імітансу вимірювального чотириполюсника при підключенні двох довільних навантажень, будують імітансне коло, визначають його радіус, координату центра та розраховують інваріантний коефіцієнт стійкості за формулою:
імітансів вимірювального чотириполюсника при довільних перетворювальних імітансах, який відрізняється тим, що вимірюють за допомогою вимірювальної лінії два значення вихідного імітансу вимірювального чотириполюсника при підключенні двох довільних навантажень, будують імітансне коло, визначають його радіус, координату центра та розраховують інваріантний коефіцієнт стійкості за формулою:
 ,
,
де: ![]() - радіус першого кола,
- радіус першого кола, ![]() - радіус другого кола,
- радіус другого кола, ![]() - координата центра другого кола,
- координата центра другого кола, ![]() - вхідний імітанс кола.
- вхідний імітанс кола.
Текст
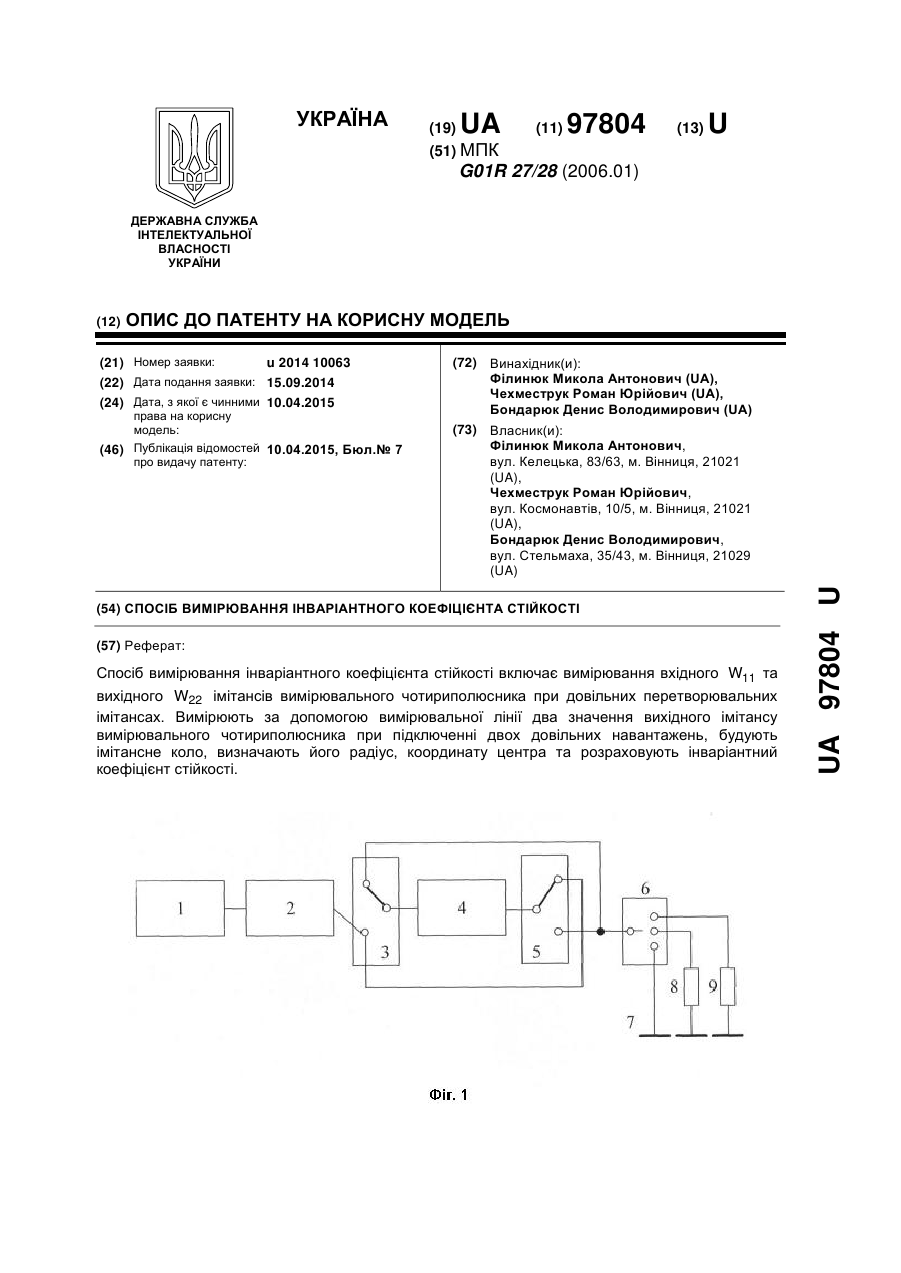
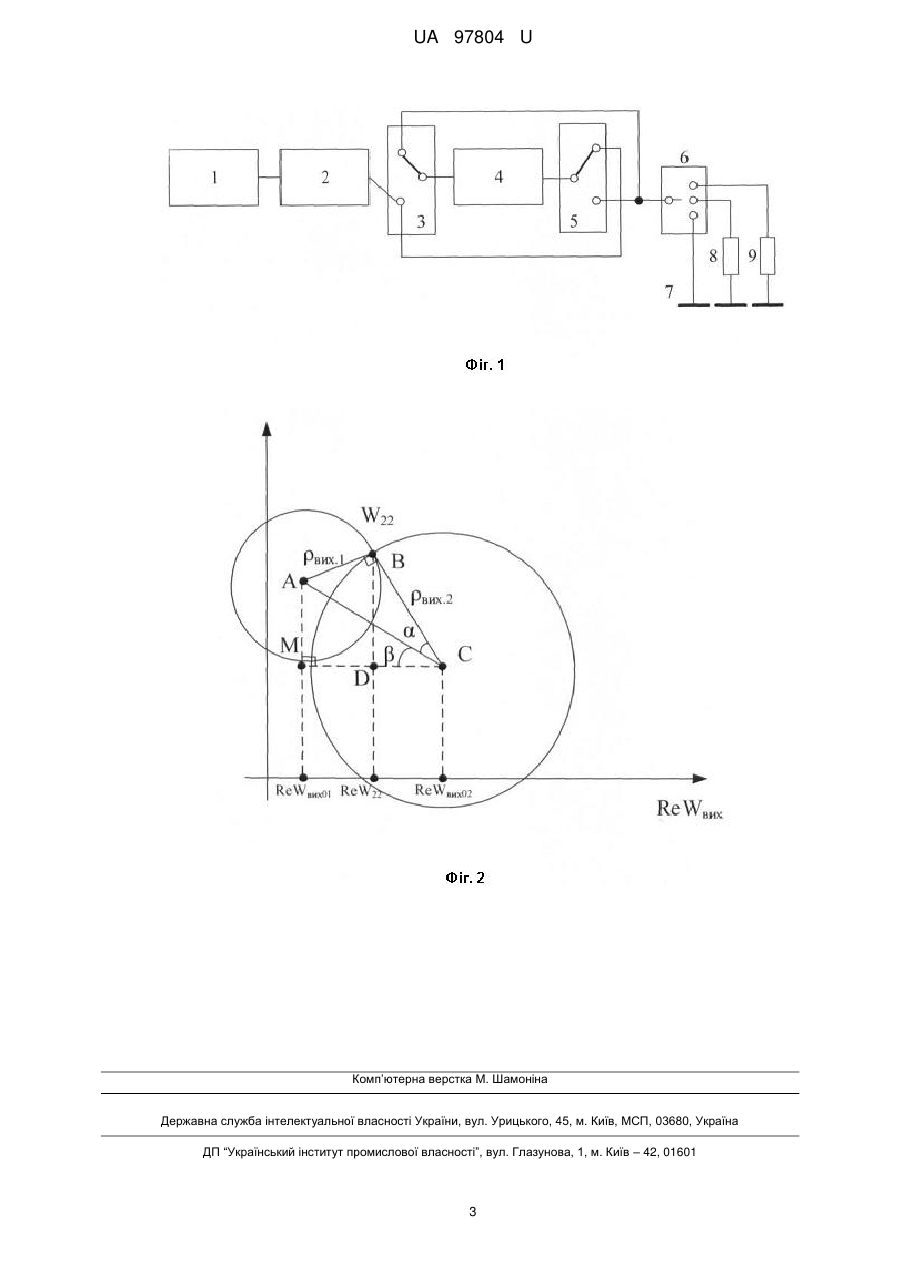
Реферат: Спосіб вимірювання інваріантного коефіцієнта стійкості включає вимірювання вхідного W11 та вихідного W22 імітансів вимірювального чотириполюсника при довільних перетворювальних імітансах. Вимірюють за допомогою вимірювальної лінії два значення вихідного імітансу вимірювального чотириполюсника при підключенні двох довільних навантажень, будують імітансне коло, визначають його радіус, координату центра та розраховують інваріантний коефіцієнт стійкості. UA 97804 U (12) UA 97804 U UA 97804 U 5 10 15 20 25 Корисна модель належить до області електроніки, зокрема до вимірювальної техніки визначення інваріантного коефіцієнта стійкості. Відомий спосіб вимірювання інваріантного коефіцієнта стійкості, що включає вимірювання потужності сигналу на вході та виході чотириполюсника при двох значеннях вхідного опору, який перевищує опір генератора, та подальший розрахунок [патент SU № 1335892, G01R 23/02, 1987 р., бюл. № 33]. Недоліком даного способу є вузькі функціональні можливості через те, що він застосовується тільки для абсолютно-стійких чотириполюсників. Найбільш близьким до запропонованого є спосіб вимірювання інваріантного коефіцієнта стійкості, що включає вимірювання вхідного та вихідного імітансів чотириполюсника, в подальшому вимірювальний чотириполюсник, при довільних перетворювальних імітансах [Ліщинська Л.Б. Метод вимірювання внутрішнього інваріантного коефіцієнта стійкості вимірюваного чотириполюсника / Л.Б. Ліщинська // Вісник Кременчуцького національного університету імені Михайла Остроградського: КрНУ, 2011. - Випуск 6(71), част. 1. - С. 17-19]. Недоліком даного способу є необхідні використання трьох значень активних імітансних навантажень, що значно збільшує трудомісткість вимірювань. В основу корисної моделі поставлено задачу створення способу вимірювання інваріантного коефіцієнта стійкості, в якому за рахунок введення нових операцій та їх послідовності досягається зменшення трудомісткості вимірювань при збереженні стійкості, що приводить до підвищення точності вимірювань. Поставлена задача вирішується тим, що згідно зі способом вимірювання інваріантного коефіцієнта стійкості, що включає вимірювання вхідного W 11, та вихідного імітансів W 22 чотириполюсника при довільних перетворювальних імітансах, причому вимірюють за допомогою вимірювальної лінії два значення вихідного імітансу чотириполюсника при підключенні двох довільних навантажень, будують імітансне коло, визначають його радіус, координату центра та розраховують інваріантний коефіцієнт стійкості по формулі: K у.в н. 30 35 40 45 50 55 2 2 Re Wв их.02 cos в их.1 в их.2 Re W11 , в их.2 Im W11 де: в их.1 - радіус першого кола, в их.2 - радіус другого кола, Re Wв их.02 - координата центра другого кола, W11 - вхідний імітанс кола. На фіг. 1 зображена структурна схема-установка для вимірювання вхідних та вихідних імітансів, на фіг. 2. зображені імітансні кола при Im WГ Im WГ 0 та Re WГ Im WГ 0 , де Re WГ - дійсна складова імітансу генератора, Im WГ - уявна складова імітансу генератора. Спосіб для проведення вимірювань інваріантного коефіцієнта стійкості здійснюється за допомогою пристрою, який складається з генератора 1, вимірювача повних опорів 2, першого комутатора 3, вимірювального чотириполюсника 4, другого комутатора 5, третього комутатора 6, спільної шини 7, першого опору 8, другого опору 9. При цьому генератор 1 з'єднаний з вимірювачем повних опорів 2, який з'єднаний з другим нерухомим контактом першого комутатора 3, рухомий контакт якого з'єднаний з вимірювальним чотириполюсником 4. Рухомий контакт другого комутатора 5 з'єднаний з вимірювальним чотириполюсником 4, перший нерухомий контакт другого комутатора 5 з'єднаний з другим контактом першого комутатора 3, а другий нерухомий контакт другого комутатора 5 з'єднаний з першим контактом першого комутатора 3 та з рухомим контактом третього комутатора 6, перший нерухомий контакт якого з'єднаний через перший опір 8 з спільною шиною 7, другий нерухомий контакт комутатора 6 через другий опір 9 з спільною шиною 7, третій нерухомий контакт комутатора 6 зі спільною шиною 7. Спосіб здійснюється наступним чином. Забезпечивши режим короткого замикання на вході та виході вимірювального чотириполюсника 4, за допомогою першого комутатора 3, другого комутатора 5 та третього комутатора 6 отримуємо значення вхідного W 11 та вихідного W 22 імітансів. В третьому комутаторі 6 з'єднують рухомий контакт з першим та другим нерухомим. В цьому режимі виконують вимірювання двох значень вихідного повного опору W вих11 та W вих12 вимірювального чотириполюсника 4 за допомогою вимірювача повних опорів 2. За значеннями W 11, W 22, W вих11, W вих12 будують імітансне коло, визначають координату центра та значення радіуса. 1 UA 97804 U Розрахунок інваріантного коефіцієнта стійкості проводиться наступним чином. Інваріантний коефіцієнт стійкості визначається за формулою: K y Re Wв их.01 / в их.1 . 5 Розраховується радіус першого імітансного кола, який буде дорівнювати: вих.1 вих.2 Im W11 / Re W11 , 10 де: в их.2 - радіус другого кола, Re W11 - дійсна частина вхідного імітанса кола, Im W11 уявна частина вхідного імітанса кола. З трикутника BCD знаходимо cos : cos Re Wв их.02 Re W22 / в их.2 15 де: Re Wв их.02 - дійсна частина координати центра кола, Re W22 - дійсна частина вихідного імітансу кола. З трикутника ABC: 20 arctanвих.1 / вих.2 , тоді кут буде рівний: arccosRe Wвих.02 Re W22 / вих.2 arctanвих.1 / вих.2 . 25 Із трикутника АМС знаходимо відрізок МС: 2 2 MC в их.1 в их.2 cos . 30 Знаходимо координату активної складової центра першого кола: 2 2 Re Wв их.01 Re Wв их.02 в их.1 в их.2 cos . З урахуванням вище наведених виразів інваріантний коефіцієнт стійкості буде рівний: 35 K у. 2 2 Re Wв их.02 в их.1 в их.2 cos в их.1 Im W11 . ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Спосіб вимірювання інваріантного коефіцієнта стійкості, що включає вимірювання вхідного W11 та вихідного W22 імітансів вимірювального чотириполюсника при довільних перетворювальних імітансах, який відрізняється тим, що вимірюють за допомогою вимірювальної лінії два значення вихідного імітансу вимірювального чотириполюсника при підключенні двох довільних навантажень, будують імітансне коло, визначають його радіус, координату центра та розраховують інваріантний коефіцієнт стійкості за формулою: 2 2 Re Wв их.02 cos в их.1 в их.2 Re W11 , K у.в н. в их.2 Im W11 де: в их.1 - радіус першого кола, в их.2 - радіус другого кола, Re Wв их.02 - координата центра другого кола, W11 - вхідний імітанс кола. 2 UA 97804 U Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюChekhmestruk Roman Yuriiovych, Bondariuk Denys Volodymyrovych
Автори російськоюЧехместрук Роман Юриевич, Бондарюк Денис Владимирович
МПК / Мітки
МПК: G01R 27/28
Мітки: стійкості, вимірювання, спосіб, коефіцієнта, інваріантного
Код посилання
<a href="https://ua.patents.su/5-97804-sposib-vimiryuvannya-invariantnogo-koeficiehnta-stijjkosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання інваріантного коефіцієнта стійкості</a>
Спосіб вимірювання інваріантного коефіцієнта стійкості чотириполюсника
Номер патенту: 20996
Опубліковано: 15.02.2007
Автори: Куземко Олександр Михайлович, Філинюк Микола Антонович
МПК: G01R 27/28
Мітки: інваріантного, вимірювання, коефіцієнта, спосіб, стійкості, чотириполюсника
Формула / Реферат:
Спосіб вимірювання інваріантного коефіцієнта стійкості чотириполюсника, що включає вимірювання імітансної матриці W-параметрів чотириполюсника та наступний розрахунок інваріантного коефіцієнта стійкості, який відрізняється тим, що вимірюють три значення вихідного імітансу чотириполюсника при відповідно трьох різних фіксованих значеннях імітансу генератора для трьох значень шунтувальних резисторів по входу та виходу чотириполюсника, будують...
Спосіб вимірювання інваріантного коефіцієнта стійкості чотириполюсника
Номер патенту: 16644
Опубліковано: 15.08.2006
Автори: Філинюк Микола Антонович, Булига Ігор Володимирович, Огородник Костянтин Володимирович
МПК: G01R 27/28
Мітки: стійкості, вимірювання, інваріантного, коефіцієнта, спосіб, чотириполюсника
Формула / Реферат:
Спосіб вимірювання інваріантного коефіцієнта стійкості чотириполюсника, що включає вимірювання імітансної матриці W-параметрів чотириполюсника та подальший розрахунок інваріантного коефіцієнта стійкості, який відрізняється тим, що вимірюють тільки два значення вхідного та одне значення вихідного імітансів чотириполюсника при відповідно двох різних, але довільних фіксованих значеннях імітансу навантаження та довільному фіксованому значенні...
Спосіб вимірювання коефіцієнта стійкості чотириполюсника
Номер патенту: 20993
Опубліковано: 15.02.2007
Автори: Куземко Олександр Михайлович, Філинюк Микола Антонович
МПК: G01R 27/28
Мітки: вимірювання, спосіб, чотириполюсника, коефіцієнта, стійкості
Формула / Реферат:
Спосіб вимірювання коефіцієнта стійкості чотириполюсника, що включає вимірювання імітансної матриці W-параметрів чотириполюсника та наступний розрахунок коефіцієнта стійкості, який відрізняється тим, що вимірюють три значення вихідного імітансу чотириполюсника при відповідно трьох різних фіксованих значеннях імітансу генератора для двох значень шунтувальних резисторів по виходу чотириполюсника, будують імітансну окружність, визначать її...
Спосіб вимірювання стійкості вилкового навантажувача
Номер патенту: 52324
Опубліковано: 25.08.2010
Автори: Білобровський Євген Миколайович, Кічкіна Олена Іванівна, Кічкін Олексій Вікторович
МПК: G08B 31/00
Мітки: вимірювання, стійкості, навантажувача, спосіб, вилкового
Формула / Реферат:
Спосіб вимірювання стійкості вилкового навантажувача, що полягає у вимірюванні коефіцієнту запасу подовжньої та бокової стійкості навантажувача у русі та штабелюванні, який відрізняється тим, що використовують дані про вагу, максимальні кути нахилу та розміщення центра ваги навантажувача, доповнюють даними про розміщення центра ваги та вагу вантажу з вантажної RFID-мітки, зчитуваної в момент навантаження бортовим (мобільним) RFID-сканером,...
Спосіб вимірювання активного опору
Номер патенту: 45888
Опубліковано: 25.11.2009
Автори: Огородник Костянтин Володимирович, Мазарчук Наталія Борисівна, Філинюк Микола Антонович, Ліщинська Людмила Броніславівна
МПК: G01R 27/28
Мітки: вимірювання, активного, опору, спосіб
Формула / Реферат:
Спосіб вимірювання активного опору, що включає вимірювання параметрів схеми без шуканого опору, вимірювання параметрів схеми з підімкненим шуканим опором та подальший розрахунок шуканого активного опору, який відрізняється тим, що спочатку вимірюють значення потужності сигналу генератора на виході пасивного невзаємного чотириполюсника Рвих з підімкненим до нього шуканим активним опором, вимірюють значення потужності сигналу генератора на...
Попередній патент: Розпушувально-тріпальна машина
Наступний патент: Лікарський засіб седативної дії у формі м’яких жувальних капсул
Випадковий патент: Безгребельна гідроелектростанція