Полімерний сенсорний матеріал
Номер патенту: 98390
Опубліковано: 27.04.2015
Автори: Лебедєв Євген Вікторович, Паращенко Ірина Миколаївна, Левченко Володимир Володимирович, Мамуня Євген Петрович, Клименко Юрій Олександрович


Формула / Реферат
Полімерний сенсорний матеріал на основі полімерного зв'язуючого і електропровідного наповнювача, який відрізняється тим, що він як полімерне зв'язуюче містить силіконовий полімер "ВІКСЕЛ", як електропровідний наповнювач - порошок електролітичної міді з частинками дендритної форми, за такого співвідношення компонентів, % об.:
силіконовий полімер "ВІКСЕЛ"
70-75
порошок дисперсної міді (Сu)
25-30.
Текст
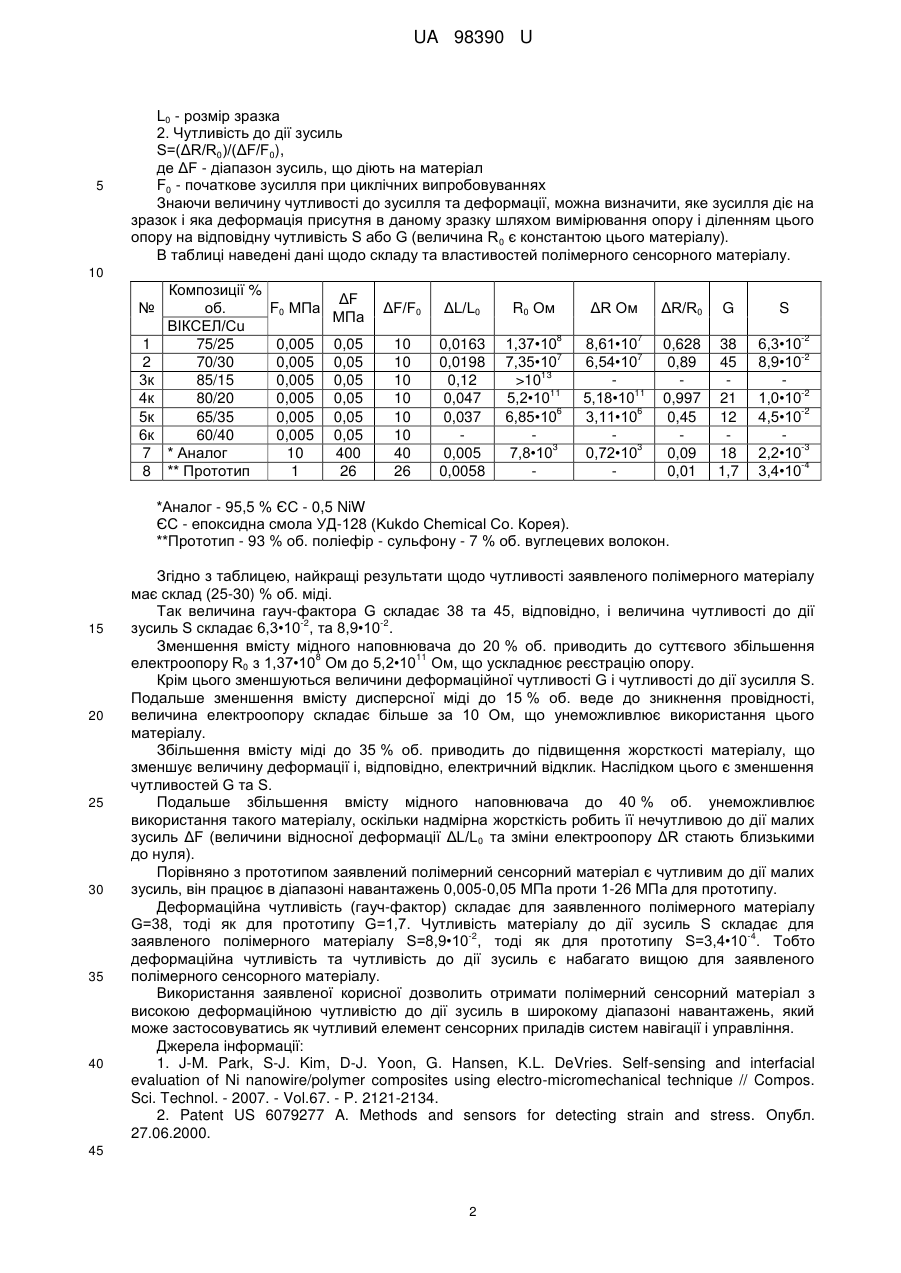
Реферат: Полімерний сенсорний матеріал на основі полімерного зв'язуючого і електропровідного наповнювача. Як полімерне зв'язуюче містить силіконовий полімер "ВІКСЕЛ". Як електропровідний наповнювач - порошок електролітичної міді з частинками дендритної форми. UA 98390 U (54) ПОЛІМЕРНИЙ СЕНСОРНИЙ МАТЕРІАЛ UA 98390 U UA 98390 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до полімерних матеріалів і може бути використана для контролю зовнішнього середовища, як чутливий елемент сенсорних приладів систем навігації і управління. Відомий полімерний композиційний матеріал, що складається з епоксидної матриці, яка містить 0,5 % об. нікелевих нанодротів і який є чутливим до дії зовнішніх зусиль. Композиційний матеріал має високу стабільність показників при циклічній дії навантаження/розвантаження і лінійну залежність між силою, деформацією та електричним опором. Недоліками цієї композиції є нечутливість до малих значень зусиль, електричний відклик в діапазоні навантажень 10-400 МПа, а також низьке значення деформаційної чутливості [1]. Найбільш близькою за технічною суттю до заявленої корисної моделі є полімерна композиція на основі полімерного зв'язуючого поліефір-сульфону, наповнена 7 % об. електропровідними вуглецевими волокнами діаметром від 0,01 до 1 мкм. Полімерний матеріал має лінійну залежність між силою, деформацією та електричним опором та відносно низькі значення зусиль, в діапазоні яких проявляється електрична чутливість матеріалу, він має електричний відклик в діапазоні навантажень 1-25 МПа. Недоліками цього матеріалу є: - низька чутливість до дії зусиль - низькі значення деформаційної чутливості (гауч-фактора) - невисока стабільність показників при циклічній дії навантаження/розвантаження [2] Задача корисної моделі - отримати полімерний сенсорний матеріал з високою чутливістю до навантаження і деформації і придатний до використання в сенсорах тиску, зусиль або деформацій. Поставлена задача вирішується тим, що полімерний сенсорний матеріал на основі полімерного зв'язуючого і електропровідного наповнювача, згідно із запропонованою корисною моделлю, як полімерне зв'язуюче містить еластичний силіконовий полімер ВІКСЕЛ, як електричний наповнювач - порошок дисперсної міді є частинками дендритної форми розмірами 50-70 мкм, за наступного співвідношення компонентів, % об.: силіконовий полімер 70-75 "ВІКСЕЛ" порошок дисперсної міді (Сu) 25-30. Для експериментальної перевірки полімерного сенсорного матеріалу були підготовлені шість сумішей матеріалу, два з яких, згідно з випробуваннями, показали найкращі результати (див. таблицю). Як полімерне зв'язуюче використовували еластичний силіконовий полімер "ВІКСЕЛ" (ТУ У 25.1-00151644-177:2009), як наповнювач - електропровідний порошок дисперсної міді з частинками дендритної форми з розмірами 50-70 мкм (ГОСТ 4960-75 Порошок мідний електролітичний). Суміш готували таким чином: в еластичний силіконовий полімер вводили каталізатор УП-2 та мідний порошок за співвідношенням, згідно з таблицею, та механічно перемішували протягом 10 хв. Отриману суміш темно-коричневого кольору поміщали у форму товщиною 2,5 мм. та вакуумували протягом 5 хв. Форму з сумішшю виймали з вакуумної шафи і отверджували протягом 24 год. за температури 20±1 °C та вологості повітря 45 %. Випробування полімерного матеріалу проводили на модифікованому приладі ТМА 400Е (виробництва Instrument USA), що одночасно надає зусилля на зразок (яке може змінюватись згідно заданої програми для проведення циклічних випробовувань) та реєструє значення деформації і опору. З отвердженого полімерного матеріалу вирізали зразок у вигляді диска діаметром 6 мм і товщиною 2,5 мм, вміщували між двома потужними електродами і монтували в комірку приладу, таким чином, що зусилля діяли на здавлювання композиції нормально до площини електричного опору зразка. Випробування проводилися в циклічному режимі навантаження/розвантаження в діапазоні 0,005-0,05 МПа. Прилад одночасно реєстрував 3 параметри: зміну зусилля на зразок ΔF(H) в заданому діапазоні, яке перераховувалося в навантаження (МПа) з урахуванням геометрії зразка, деформацією матеріалу ΔL (мм) та зміну електричного опору ΔR (Ом). Електричну чутливість матеріалу розраховували таким чином: 1. Деформаційна чутливість або гауч-фактор (gauge-factor) G=(ΔR/R0)/(ΔL/L0) Де ΔR - є зміна опору при дії зусилля R0 - початковий опір (що є константою даного матеріалу) ΔL - діапазон деформації над дією зусиль 1 UA 98390 U 5 L0 - розмір зразка 2. Чутливість до дії зусиль S=(ΔR/R0)/(ΔF/F0), де ΔF - діапазон зусиль, що діють на матеріал F0 - початкове зусилля при циклічних випробовуваннях Знаючи величину чутливості до зусилля та деформації, можна визначити, яке зусилля діє на зразок і яка деформація присутня в даному зразку шляхом вимірювання опору і діленням цього опору на відповідну чутливість S або G (величина R 0 є константою цього матеріалу). В таблиці наведені дані щодо складу та властивостей полімерного сенсорного матеріалу. 10 № 1 2 3к 4к 5к 6к 7 8 Композиції % об. ВІКСЕЛ/Сu 75/25 70/30 85/15 80/20 65/35 60/40 * Аналог ** Прототип F0 МПа ΔF МПа ΔF/F0 ΔL/L0 R0 Ом 0,005 0,005 0,005 0,005 0,005 0,005 10 1 0,05 0,05 0,05 0,05 0,05 0,05 400 26 10 10 10 10 10 10 40 26 0,0163 0,0198 0,12 0,047 0,037 0,005 0,0058 1,37•10 7 7,35•10 13 >10 11 5,2•10 6 6,85•10 3 7,8•10 ΔR Ом 8 7 8,61•10 7 6,54•10 11 5,18•10 6 3,11•10 3 0,72•10 ΔR/R0 G S 0,628 0,89 0,997 0,45 0,09 0,01 38 45 21 12 18 1,7 6,3•10 -2 8,9•10 -2 1,0•10 -2 4,5•10 -3 2,2•10 -4 3,4•10 -2 *Аналог - 95,5 % ЄС - 0,5 NiW ЄС - епоксидна смола УД-128 (Kukdo Chemical Co. Корея). **Прототип - 93 % об. поліефір - сульфону - 7 % об. вуглецевих волокон. 15 20 25 30 35 40 Згідно з таблицею, найкращі результати щодо чутливості заявленого полімерного матеріалу має склад (25-30) % об. міді. Так величина гауч-фактора G складає 38 та 45, відповідно, і величина чутливості до дії -2 -2 зусиль S складає 6,3•10 , та 8,9•10 . Зменшення вмісту мідного наповнювача до 20 % об. приводить до суттєвого збільшення 8 11 електроопору R0 з 1,37•10 Ом до 5,2•10 Ом, що ускладнює реєстрацію опору. Крім цього зменшуються величини деформаційної чутливості G і чутливості до дії зусилля S. Подальше зменшення вмісту дисперсної міді до 15 % об. веде до зникнення провідності, величина електроопору складає більше за 10 Ом, що унеможливлює використання цього матеріалу. Збільшення вмісту міді до 35 % об. приводить до підвищення жорсткості матеріалу, що зменшує величину деформації і, відповідно, електричний відклик. Наслідком цього є зменшення чутливостей G та S. Подальше збільшення вмісту мідного наповнювача до 40 % об. унеможливлює використання такого матеріалу, оскільки надмірна жорсткість робить її нечутливою до дії малих зусиль ΔF (величини відносної деформації ΔL/L0 та зміни електроопору ΔR стають близькими до нуля). Порівняно з прототипом заявлений полімерний сенсорний матеріал є чутливим до дії малих зусиль, він працює в діапазоні навантажень 0,005-0,05 МПа проти 1-26 МПа для прототипу. Деформаційна чутливість (гауч-фактор) складає для заявленного полімерного матеріалу G=38, тоді як для прототипу G=1,7. Чутливість матеріалу до дії зусиль S складає для -2 -4 заявленого полімерного матеріалу S=8,9•10 , тоді як для прототипу S=3,4•10 . Тобто деформаційна чутливість та чутливість до дії зусиль є набагато вищою для заявленого полімерного сенсорного матеріалу. Використання заявленої корисної дозволить отримати полімерний сенсорний матеріал з високою деформаційною чутливістю до дії зусиль в широкому діапазоні навантажень, який може застосовуватись як чутливий елемент сенсорних приладів систем навігації і управління. Джерела інформації: 1. J-M. Park, S-J. Kim, D-J. Yoon, G. Hansen, K.L. DeVries. Self-sensing and interfacial evaluation of Ni nanowire/polymer composites using electro-micromechanical technique // Compos. Sci. Technol. - 2007. - Vol.67. - P. 2121-2134. 2. Patent US 6079277 A. Methods and sensors for detecting strain and stress. Опубл. 27.06.2000. 45 2 UA 98390 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Полімерний сенсорний матеріал на основі полімерного зв'язуючого і електропровідного наповнювача, який відрізняється тим, що він як полімерне зв'язуюче містить силіконовий полімер "ВІКСЕЛ", як електропровідний наповнювач - порошок електролітичної міді з частинками дендритної форми, за такого співвідношення компонентів, % об.: силіконовий полімер "ВІКСЕЛ" 70-75 порошок дисперсної міді (Сu) 25-30. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюMamunia Yevhen Petrovych, Paraschenko Iryna Mykolaivna, Klymenko Yurii Oleksandrovych, Lebediev Yevhen Viktorovych
Автори російськоюМамуня Евгений Петрович, Паращенко Ирина Николаевна, Клименко Юрий Александрович, Лебедев Евгений Викторович
МПК / Мітки
МПК: G01N 27/00, G01N 27/04
Мітки: матеріал, полімерний, сенсорний
Код посилання
<a href="https://ua.patents.su/5-98390-polimernijj-sensornijj-material.html" target="_blank" rel="follow" title="База патентів України">Полімерний сенсорний матеріал</a>
Полімерний матеріал, стійкий до впливу атмосферних факторів, спосіб його одержання та застосування
Номер патенту: 72518
Опубліковано: 15.03.2005
Автори: Марстон Ніколас Джон, Еустейс Пол, МакКейті Нейл Ендрю
МПК: C08K 3/22, E04C 2/10, C08K 3/00, C08L 33/00, C08L 101/00, C09K 21/00
Мітки: стійкий, атмосферних, застосування, спосіб, факторів, полімерний, одержання, впливу, матеріал
Формула / Реферат:
1. Полімерний матеріал, що включає(а) акриловий полімер, вибраний з гомополімеру алкіл(алк)акрилату, співполімеру, одержаного полімеризацією мономерної суміші, яка містить від 50 до 99 мас. % алкілметакрилату і від 1 до 50 мас. % алкілакрилату, або співполімеру, що включає принаймні 15 мас. % акрилонітрилу;(б) галогенвмісний полімер, що містить від 5 до 70 мас. % галогену;(в) від 0,1 до 25 мас. % неорганічного гідроксиду,...
Композиційний полімерний матеріал
Номер патенту: 41440
Опубліковано: 25.05.2009
Автори: Мельник Юрій Ярославович, Литвиненко Євгенія Ігорівна
МПК: A61K 6/02
Мітки: полімерний, матеріал, композиційний
Формула / Реферат:
Композиційний полімерний матеріал, який містить порошкоподібну фракцію акрилоксиду, який відрізняється тим, що містить додатково кварц, при такому співвідношенні компонентів у порошкоподібній фракції акрилоксиду (мас. ч.): кварц 5...20 порошкоподібна фракція акрилоксиду 80...95, при готуванні композиційного полімерного матеріалу рідку і порошкоподібну фракції змішують...
Вібропоглинаючий полімерний матеріал
Номер патенту: 60798
Опубліковано: 25.06.2011
Автори: Тодосійчук Тамара Тимофіївна, Ярова Наталія Володимирівна, Алексєєва Тетяна Трохимівна, Бабкіна Наталія Валентинівна
МПК: C08G 18/00, B32B 27/40
Мітки: матеріал, полімерний, вібропоглинаючий
Формула / Реферат:
Вібропоглинаючий полімерний матеріал, що включає продукт взаємодії толуїлендіізоціанату і поліоксипропіленгліколю з молекулярною масою 1000, який відрізняється тим, що співвідношення толуїлендіізоціанату і поліоксипропіленгліколю відповідає їх стехіометричному співвідношенню як 2:1 відповідно, і матеріал отриманий твердінням при температурі 50-65 °С реакційної суміші триметилолпропану з продуктом взаємодії толуїлендіізоціанату і...
Композиційний полімерний матеріал
Номер патенту: 40103
Опубліковано: 25.03.2009
Автори: Авраменко В'ячеслав Леонідович, Литвиненко Євгенія Ігорівна
МПК: A61K 6/02
Мітки: матеріал, композиційний, полімерний
Формула / Реферат:
Композиційний полімерний матеріал, який містить порошкоподібну фракцію акрилоксиду, який відрізняється тим, що містить додатково синтетичний цеоліт, декаметоксин, полівініловий спирт (ПВС) при такому співвідношенні компонентів у порошкоподібній фракції акрилоксиду (мас. ч.): синтетичний цеоліт 4,1-16,4 полівініловий спирт (ПВС) 0,25-1,0 декаметоксин ...
Полімерний матеріал для оболонок імплантатів м’яких тканин
Номер патенту: 49259
Опубліковано: 16.09.2002
Автори: Греков Анатолій Петрович, Павлик Борис Іванович, Кебуладзе Іван Михайлович, Галатенко Наталія Андріївна
МПК: A61L 27/00, C08G 18/06
Мітки: матеріал, імплантатів, оболонок, тканин, полімерний, м'яких
Формула / Реферат:
Полімерний матеріал для оболонок імплантатів м'яких тканин на основі 20-90 %-ного розчину макродіізоціанату в толуілендіізоціанаті, який відрізняється тим, що як основу містить 20-90 %-ний розчин макродіізоціанату в толуілендіізоціанаті або 20-90 %-ний розчин макродіізоціанату в 4,4'-дифенілметандіізоціанаті та додатково містить цільову добавку 1,4-бутандіолу або 1,6-гексаметилендіаміну при такому співвідношенні компонентів, ваг.%: ...
Попередній патент: Пастоподібний плавлений сир функціонального призначення
Наступний патент: Пристрій для вирощування сільськогосподарських культур
Випадковий патент: Випарний апарат