Система інформаційного забезпечення швартування танкера vlcc до монобуя
Номер патенту: 98720
Опубліковано: 12.05.2015
Автори: Мальцев Станіслав Едуардович, Деревянко Александр Анатолійович


Формула / Реферат
Система інформаційного забезпечення маневрування танкерного судна типу VLCC до монобуя, що містить блок розрахунку маневрових характеристик, блок розрахунку та індикації на контурі судна інформації про положення полюсу повороту (ПП), блок перерахунку координат від антени на центр ваги, блок планування траєкторії інверсним способом, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки, яка відрізняється тим, що система первинної обробки містить блоки непереривного вимірювання відстані від носової частини до провідника монобуя, блок розрахунку координат ПП, блок неперервної інформації про положення ПП та його візуальної індикації, блок неперервної інформації про відстань до буя провідника та його візуальної індикації, який підключено до системи вторинної обробки і непереривної індикації ПП і відстані до буя провідника.
Текст
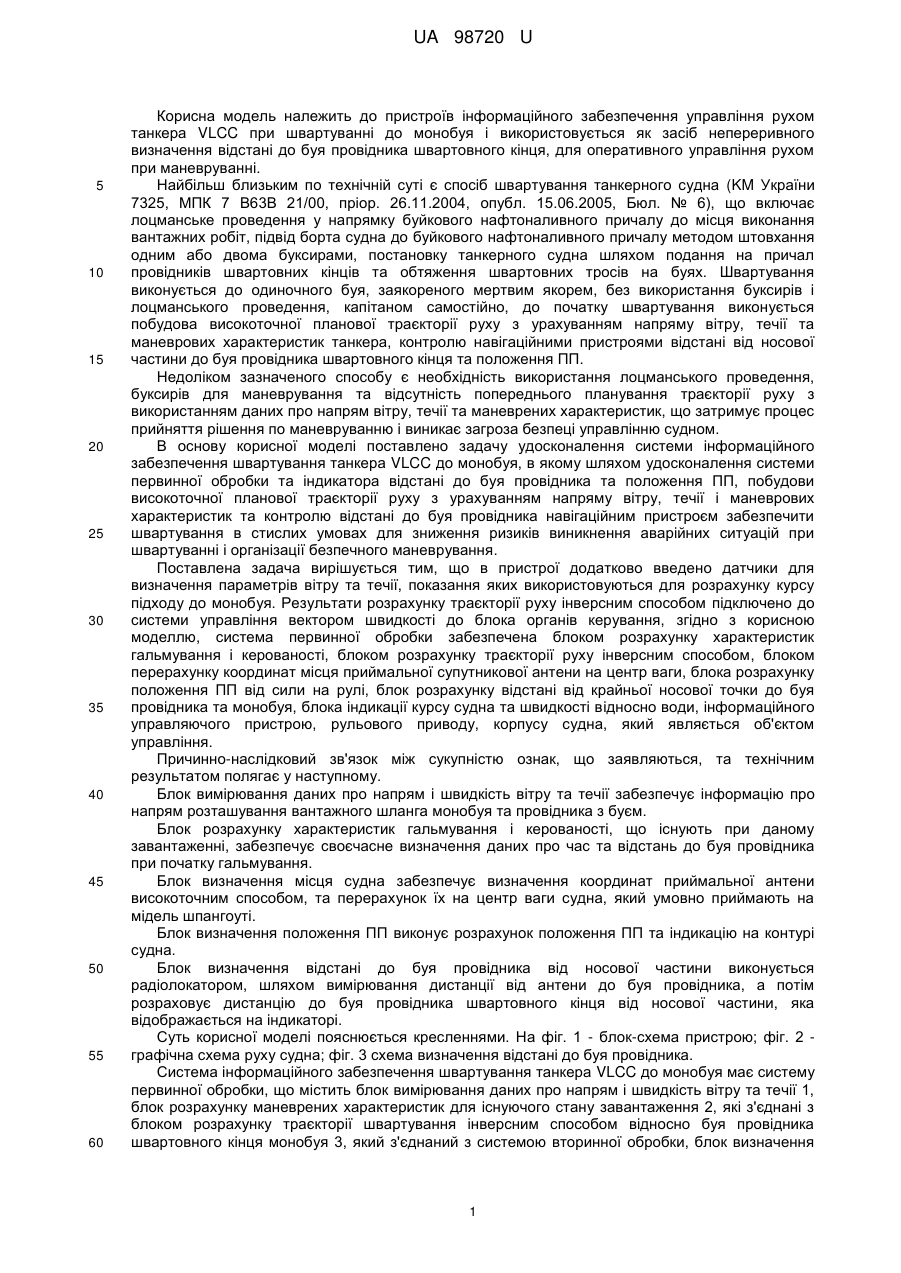
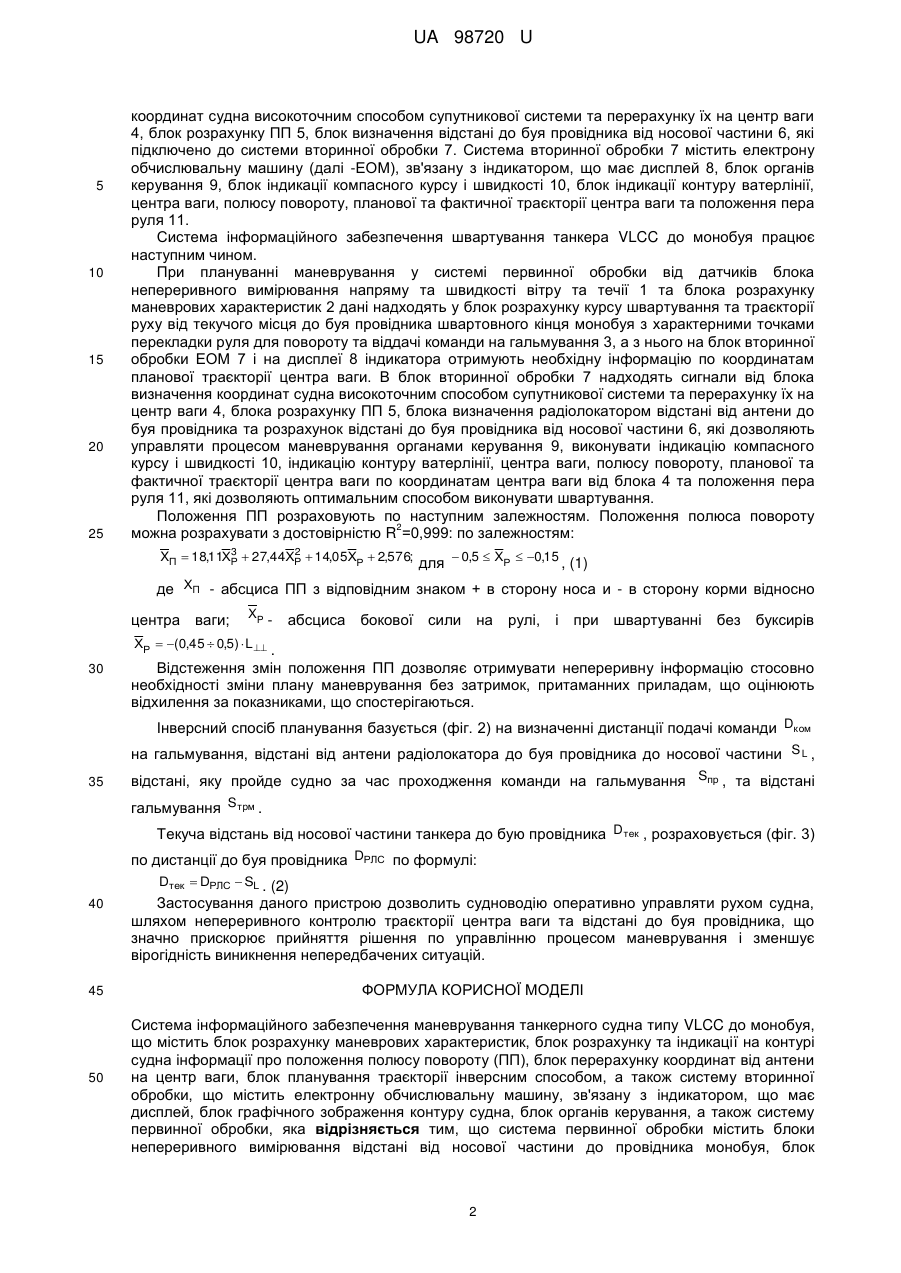
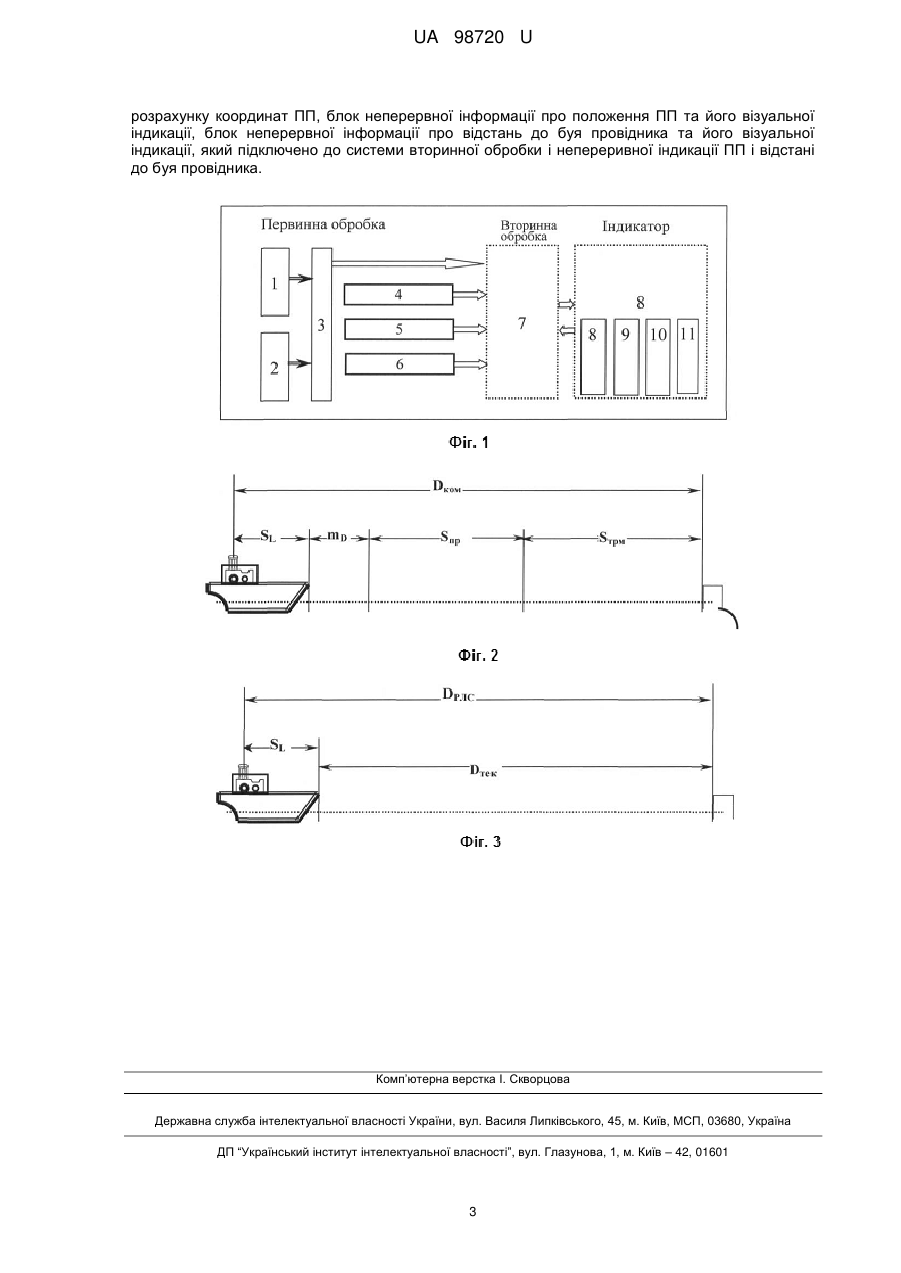
Реферат: Система інформаційного забезпечення маневрування танкерного судна типу VLCC до монобуя містить блок розрахунку маневрових характеристик, блок розрахунку та індикації на контурі судна інформації про положення полюсу повороту (ПП), блок перерахунку координат від антени на центр ваги, блок планування траєкторії інверсним способом. Також містить систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки. Система первинної обробки містить блоки непереривного вимірювання відстані від носової частини до провідника монобуя, блок розрахунку координат ПП, блок неперервної інформації про положення ПП та його візуальної індикації, блок неперервної інформації про відстань до буя провідника та його візуальної індикації, який підключено до системи вторинної обробки і непереривної індикації ПП і відстані до буя провідника. UA 98720 U (54) СИСТЕМА ІНФОРМАЦІЙНОГО ЗАБЕЗПЕЧЕННЯ ШВАРТУВАННЯ ТАНКЕРА VLCC ДО МОНОБУЯ UA 98720 U UA 98720 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до пристроїв інформаційного забезпечення управління рухом танкера VLCC при швартуванні до монобуя і використовується як засіб непереривного визначення відстані до буя провідника швартовного кінця, для оперативного управління рухом при маневруванні. Найбільш близьким по технічній суті є спосіб швартування танкерного судна (KM України 7325, МПК 7 В63В 21/00, пріор. 26.11.2004, опубл. 15.06.2005, Бюл. № 6), що включає лоцманське проведення у напрямку буйкового нафтоналивного причалу до місця виконання вантажних робіт, підвід борта судна до буйкового нафтоналивного причалу методом штовхання одним або двома буксирами, постановку танкерного судна шляхом подання на причал провідників швартовних кінців та обтяження швартовних тросів на буях. Швартування виконується до одиночного буя, заякореного мертвим якорем, без використання буксирів і лоцманського проведення, капітаном самостійно, до початку швартування виконується побудова високоточної планової траєкторії руху з урахуванням напряму вітру, течії та маневрових характеристик танкера, контролю навігаційними пристроями відстані від носової частини до буя провідника швартовного кінця та положення ПП. Недоліком зазначеного способу є необхідність використання лоцманського проведення, буксирів для маневрування та відсутність попереднього планування траєкторії руху з використанням даних про напрям вітру, течії та маневрених характеристик, що затримує процес прийняття рішення по маневруванню і виникає загроза безпеці управлінню судном. В основу корисної моделі поставлено задачу удосконалення системи інформаційного забезпечення швартування танкера VLCC до монобуя, в якому шляхом удосконалення системи первинної обробки та індикатора відстані до буя провідника та положення ПП, побудови високоточної планової траєкторії руху з урахуванням напряму вітру, течії і маневрових характеристик та контролю відстані до буя провідника навігаційним пристроєм забезпечити швартування в стислих умовах для зниження ризиків виникнення аварійних ситуацій при швартуванні і організації безпечного маневрування. Поставлена задача вирішується тим, що в пристрої додатково введено датчики для визначення параметрів вітру та течії, показання яких використовуються для розрахунку курсу підходу до монобуя. Результати розрахунку траєкторії руху інверсним способом підключено до системи управління вектором швидкості до блока органів керування, згідно з корисною моделлю, система первинної обробки забезпечена блоком розрахунку характеристик гальмування і керованості, блоком розрахунку траєкторії руху інверсним способом, блоком перерахунку координат місця приймальної супутникової антени на центр ваги, блока розрахунку положення ПП від сили на рулі, блок розрахунку відстані від крайньої носової точки до буя провідника та монобуя, блока індикації курсу судна та швидкості відносно води, інформаційного управляючого пристрою, рульового приводу, корпусу судна, який являється об'єктом управління. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, та технічним результатом полягає у наступному. Блок вимірювання даних про напрям і швидкість вітру та течії забезпечує інформацію про напрям розташування вантажного шланга монобуя та провідника з буєм. Блок розрахунку характеристик гальмування і керованості, що існують при даному завантаженні, забезпечує своєчасне визначення даних про час та відстань до буя провідника при початку гальмування. Блок визначення місця судна забезпечує визначення координат приймальної антени високоточним способом, та перерахунок їх на центр ваги судна, який умовно приймають на мідель шпангоуті. Блок визначення положення ПП виконує розрахунок положення ПП та індикацію на контурі судна. Блок визначення відстані до буя провідника від носової частини виконується радіолокатором, шляхом вимірювання дистанції від антени до буя провідника, а потім розраховує дистанцію до буя провідника швартовного кінця від носової частини, яка відображається на індикаторі. Суть корисної моделі пояснюється кресленнями. На фіг. 1 - блок-схема пристрою; фіг. 2 графічна схема руху судна; фіг. 3 схема визначення відстані до буя провідника. Система інформаційного забезпечення швартування танкера VLCC до монобуя має систему первинної обробки, що містить блок вимірювання даних про напрям і швидкість вітру та течії 1, блок розрахунку маневрених характеристик для існуючого стану завантаження 2, які з'єднані з блоком розрахунку траєкторії швартування інверсним способом відносно буя провідника швартовного кінця монобуя 3, який з'єднаний з системою вторинної обробки, блок визначення 1 UA 98720 U 5 10 15 20 25 координат судна високоточним способом супутникової системи та перерахунку їх на центр ваги 4, блок розрахунку ПП 5, блок визначення відстані до буя провідника від носової частини 6, які підключено до системи вторинної обробки 7. Система вторинної обробки 7 містить електрону обчислювальну машину (далі -ЕОМ), зв'язану з індикатором, що має дисплей 8, блок органів керування 9, блок індикації компасного курсу і швидкості 10, блок індикації контуру ватерлінії, центра ваги, полюсу повороту, планової та фактичної траєкторії центра ваги та положення пера руля 11. Система інформаційного забезпечення швартування танкера VLCC до монобуя працює наступним чином. При плануванні маневрування у системі первинної обробки від датчиків блока непереривного вимірювання напряму та швидкості вітру та течії 1 та блока розрахунку маневрових характеристик 2 дані надходять у блок розрахунку курсу швартування та траєкторії руху від текучого місця до буя провідника швартовного кінця монобуя з характерними точками перекладки руля для повороту та віддачі команди на гальмування 3, а з нього на блок вторинної обробки ЕОМ 7 і на дисплеї 8 індикатора отримують необхідну інформацію по координатам планової траєкторії центра ваги. В блок вторинної обробки 7 надходять сигнали від блока визначення координат судна високоточним способом супутникової системи та перерахунку їх на центр ваги 4, блока розрахунку ПП 5, блока визначення радіолокатором відстані від антени до буя провідника та розрахунок відстані до буя провідника від носової частини 6, які дозволяють управляти процесом маневрування органами керування 9, виконувати індикацію компасного курсу і швидкості 10, індикацію контуру ватерлінії, центра ваги, полюсу повороту, планової та фактичної траєкторії центра ваги по координатам центра ваги від блока 4 та положення пера руля 11, які дозволяють оптимальним способом виконувати швартування. Положення ПП розраховують по наступним залежностям. Положення полюса повороту 2 можна розрахувати з достовірністю R =0,999: по залежностям: 3 2 XП 18,11ХР 27,44ХР 14,05ХР 2,576; для 0,5 ХР 0,15 , (1) де ХП - абсциса ПП з відповідним знаком + в сторону носа и - в сторону корми відносно центра ваги; ХР абсциса бокової сили на рулі, і при швартуванні без буксирів ХР (0,45 0,5) L 30 . Відстеження змін положення ПП дозволяє отримувати непереривну інформацію стосовно необхідності зміни плану маневрування без затримок, притаманних приладам, що оцінюють відхилення за показниками, що спостерігаються. Інверсний спосіб планування базується (фіг. 2) на визначенні дистанції подачі команди Dком на гальмування, відстані від антени радіолокатора до буя провідника до носової частини S L , 35 відстані, яку пройде судно за час проходження команди на гальмування Sпр , та відстані гальмування S трм . Текуча відстань від носової частини танкера до бую провідника Dтек , розраховується (фіг. 3) по дистанції до буя провідника DРЛС по формулі: Dтек DРЛС SL . (2) 40 Застосування даного пристрою дозволить судноводію оперативно управляти рухом судна, шляхом непереривного контролю траєкторії центра ваги та відстані до буя провідника, що значно прискорює прийняття рішення по управлінню процесом маневрування і зменшуєвірогідність виникнення непередбачених ситуацій. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Система інформаційного забезпечення маневрування танкерного судна типу VLCC до монобуя, що містить блок розрахунку маневрових характеристик, блок розрахунку та індикації на контурі судна інформації про положення полюсу повороту (ПП), блок перерахунку координат від антени на центр ваги, блок планування траєкторії інверсним способом, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки, яка відрізняється тим, що система первинної обробки містить блоки непереривного вимірювання відстані від носової частини до провідника монобуя, блок 2 UA 98720 U розрахунку координат ПП, блок неперервної інформації про положення ПП та його візуальної індикації, блок неперервної інформації про відстань до буя провідника та його візуальної індикації, який підключено до системи вторинної обробки і непереривної індикації ПП і відстані до буя провідника. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B63B 21/00
Мітки: танкера, система, швартування, забезпечення, інформаційного, монобуя
Код посилання
<a href="https://ua.patents.su/5-98720-sistema-informacijjnogo-zabezpechennya-shvartuvannya-tankera-vlcc-do-monobuya.html" target="_blank" rel="follow" title="База патентів України">Система інформаційного забезпечення швартування танкера vlcc до монобуя</a>
Пристрій для інформаційного забезпечення процесу управління судном
Номер патенту: 97227
Опубліковано: 10.03.2015
Автори: Мальцев Станіслав Едуардович, Бень Андрій Павлович, Товстокорий Олег Миколаєвич
МПК: G08G 3/00
Мітки: пристрій, інформаційного, судном, процесу, забезпечення, управління
Формула / Реферат:
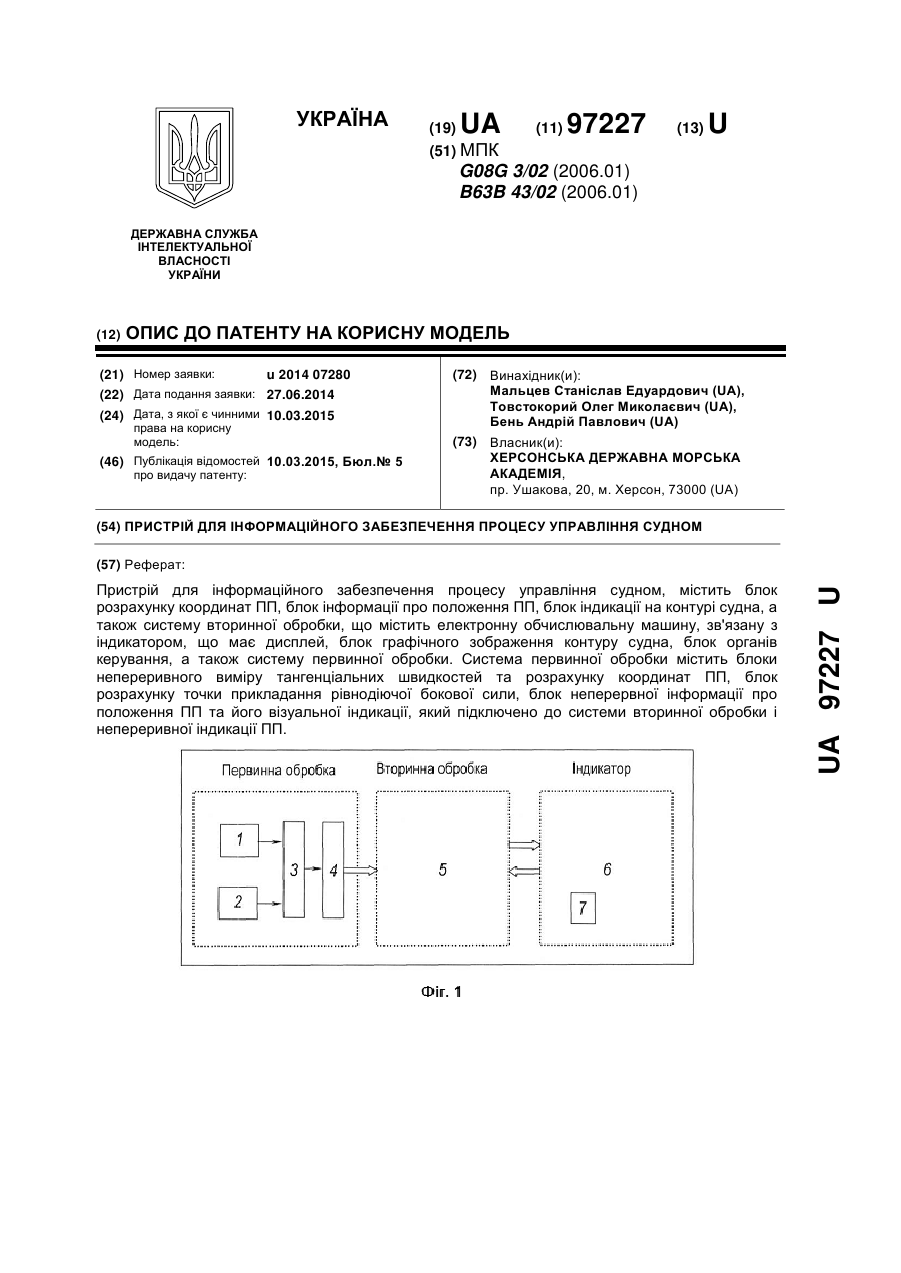
Пристрій для інформаційного забезпечення процесу управління судном, що містить блок розрахунку координат ПП, блок інформації про положення ПП, блок індикації на контурі судна, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки, яка відрізняється тим, що система первинної...
Пристрій для інформаційного забезпечення процесу керування судном під час маневрування
Номер патенту: 91006
Опубліковано: 25.06.2014
Автори: Мальцев Станіслав Едуардович, Голіков Володимир Володимирович
МПК: G08G 3/00
Мітки: інформаційного, судном, процесу, забезпечення, пристрій, маневрування, керування
Формула / Реферат:
Пристрій для інформаційного забезпечення процесу керування судном під час маневрування, що містить систему первинної обробки, яка містить блок вхідних даних, зв'язану з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, який містить дисплей, блок органів керування, який відрізняється тим, що система первинної обробки інформації має блок вводу параметрів плеча і вектора зовнішніх і внутрішніх...
Пристрій для інформаційного забезпечення лоцманської проводки морського судна
Номер патенту: 78679
Опубліковано: 25.03.2013
Автори: Мальцев Анатолій Сідорович, Соколенко Василь Іннокентійович, Голіков Володимир Володимирович, Ворохобін Ігор Ігорович
МПК: B63B 49/00, G08G 3/00
Мітки: морського, судна, інформаційного, пристрій, забезпечення, лоцманської, проводки
Формула / Реферат:
Пристрій для інформаційного забезпечення лоцманської проводки морського судна, що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, зв'язані з блоком перерахунку координат на центр ваги, зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, система...
Система для швартування судна
Номер патенту: 20871
Опубліковано: 15.02.2007
Автор: Мнухін Анатолій Григорович
МПК: G05D 1/02, B63H 25/00
Мітки: швартування, система, судна
Формула / Реферат:
Система для швартування судна, що містить датчик положення судна й блок для формування керувального сигналу, яка відрізняється тим, що її обладнано комутатором і вмонтованими в корпус судна нижче ватерлінії електродними системами, з'єднаними з генератором імпульсних струмів через комутатор, вхід комутатора з'єднано з виходом блока для формування керувального сигналу, а вхід останнього - з виходом датчика положення судна.
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення
Номер патенту: 89389
Опубліковано: 25.04.2014
Автори: Голіков Володимир Володимирович, Мальцев Анатолій Сідорович, Сафін Ігор Вікторович, Мамонтов Володимир Володимирович
МПК: G08G 3/00
Мітки: судном, інформаційного, управління, забезпечення, небезпечного, надмірного, процесу, пристрій, наближення
Формула / Реферат:
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення, що включає систему первинної обробки, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок органів керування, який відрізняється тим, що система первинної обробки містить блок даних про координати суден, що спостерігаються, блок розрахунку відстані від власного судна...
Попередній патент: Спосіб захисту будівель, споруд від зсувів
Наступний патент: Коректор коефіціента потужності
Випадковий патент: Регулятор тиску газу