Пристрій для інформаційного забезпечення процесу керування судном під час маневрування
Номер патенту: 91006
Опубліковано: 25.06.2014
Автори: Голіков Володимир Володимирович, Мальцев Станіслав Едуардович
Формула / Реферат
Пристрій для інформаційного забезпечення процесу керування судном під час маневрування, що містить систему первинної обробки, яка містить блок вхідних даних, зв'язану з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, який містить дисплей, блок органів керування, який відрізняється тим, що система первинної обробки інформації має блок вводу параметрів плеча і вектора зовнішніх і внутрішніх сил прикладених до корпусу судна, блок розрахунку рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил, який зв'язаний з блоком розрахунку характеристик плеча точки прикладання рівнодіючої поперечної сили, зв'язаний з блоком розрахунку координат положення полюсу повороту (ПП), підключеного до блока вторинної обробки, безпосередньо зв'язаний з системою вторинної обробки блок вхідних даних про буксирні судна, а індикатор додатково містить блок інформації для судноводія про плече та величину рівнодіючої бокової сили та абсцису ПП, блок візуальної індикації положення ПП на контурі корпусу судна, блок вибору точки прикладання сили упору буксирів на контурі ватерлінії.
Текст
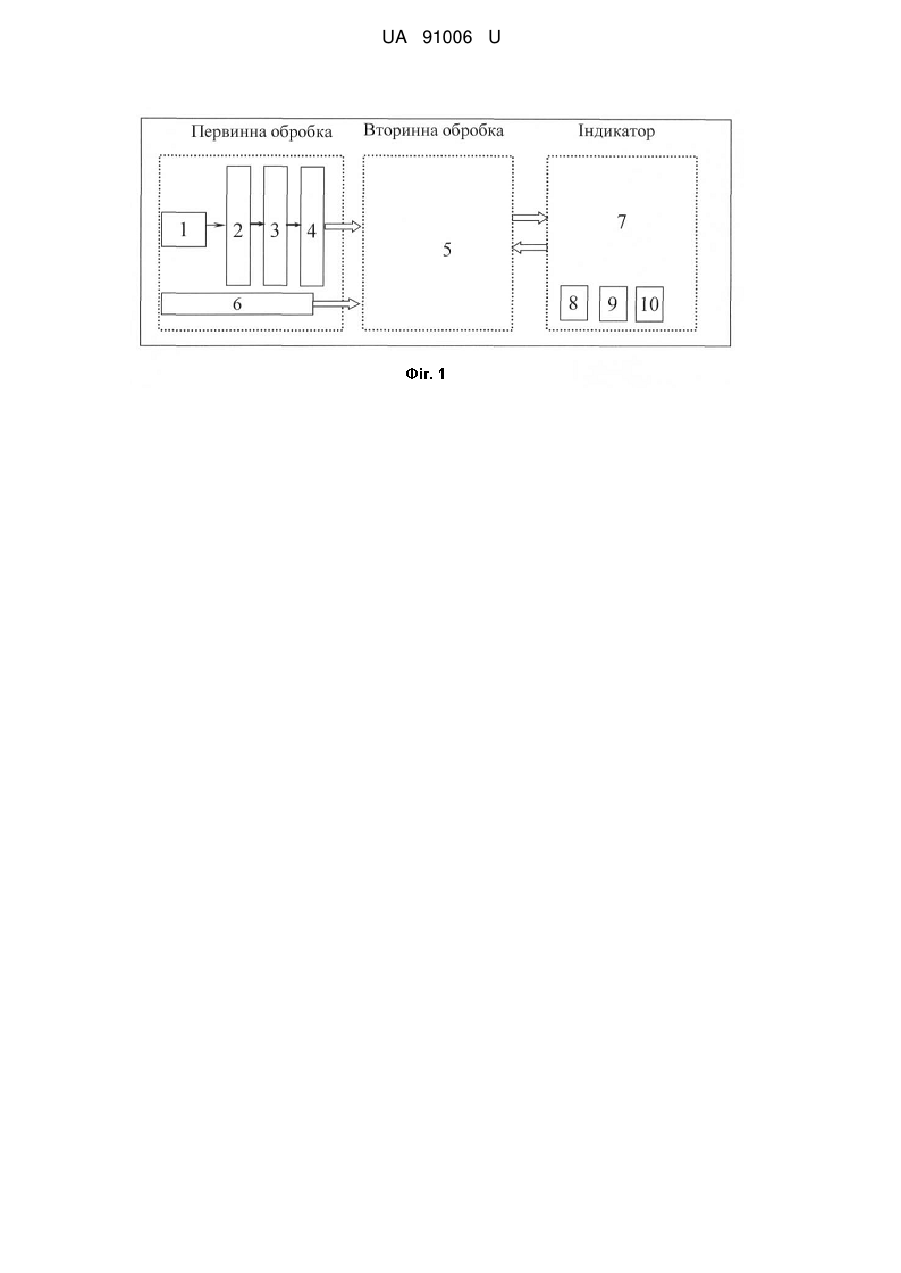
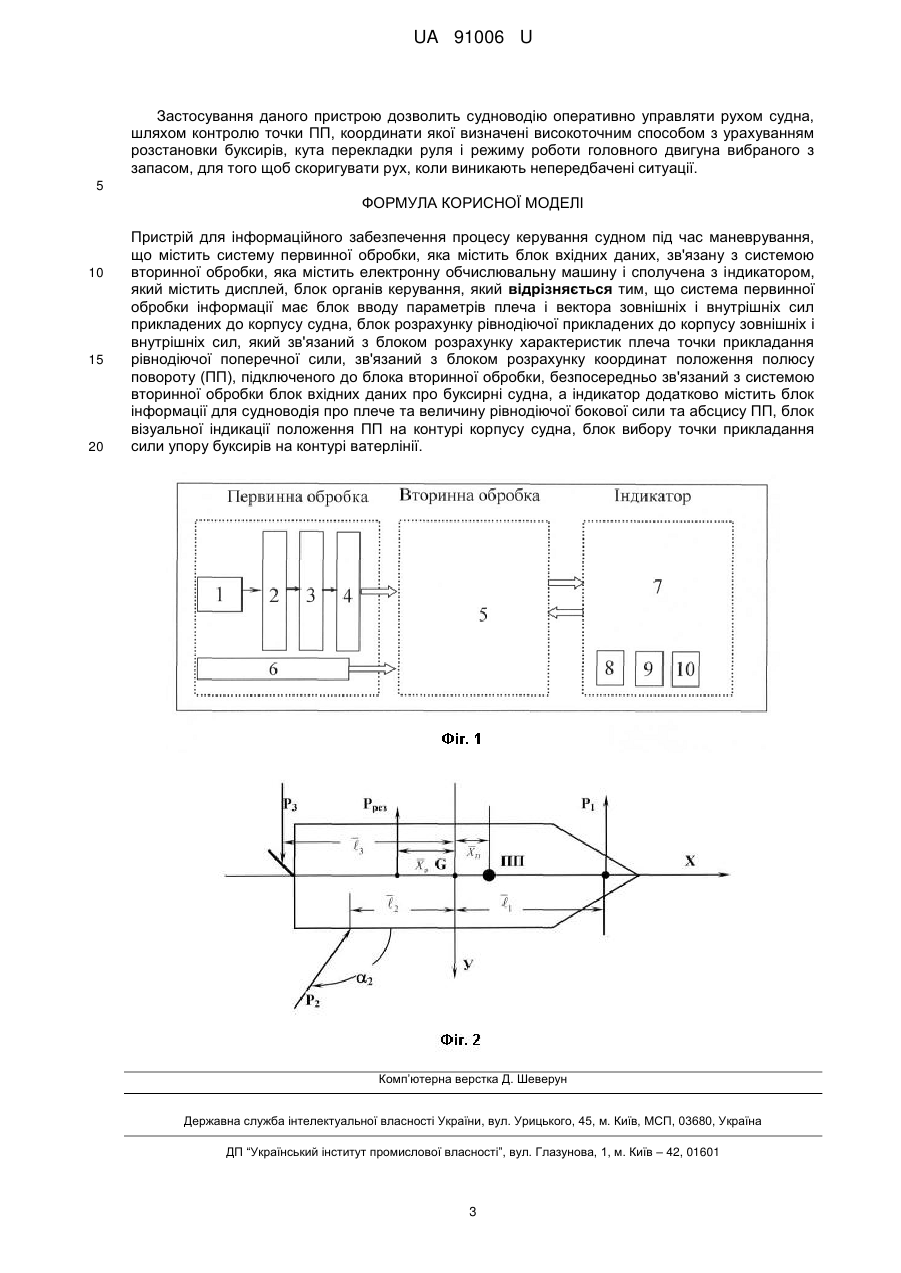
Реферат: Пристрій для інформаційного забезпечення процесу керування судном під час маневрування містить систему первинної обробки, яка містить блок вхідних даних, зв'язану з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, який містить дисплей, блок органів керування. Система первинної обробки інформації має блок вводу параметрів плеча і вектора зовнішніх і внутрішніх сил прикладених до корпусу судна. Блок розрахунку рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил зв'язаний з блоком розрахунку характеристик плеча точки прикладання рівнодіючої поперечної сили, зв'язаний з блоком розрахунку координат положення полюсу повороту (ПП), підключеного до блока вторинної обробки. Безпосередньо зв'язаний з системою вторинної обробки блок вхідних даних про буксирні судна. Індикатор додатково містить блок інформації для судноводія про плече та величину рівнодіючої бокової сили та абсцису ПП, блок візуальної індикації положення ПП на контурі корпусу судна, блок вибору точки прикладання сили упору буксирів на контурі ватерлінії. UA 91006 U (12) UA 91006 U UA 91006 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до засобів інформаційного забезпечення керування рухом судна при маневруванні і використовується як засіб автоматичного планування заданого алгоритму керування рухом суден при маневруванні і використані буксирів. Відома формалізована модель (С.И. Демин, Е.И. Жуков, Н.А. Кубачев и др. Управление судном: Учебник для вузов / Под редакц. В.И. Снопкова. - М: Транспорт, 1991. - c. 76-78), що містить тільки формульні залежності для графічного розрахунку точки прикладання поперечної сили по положенню полюса повороту (далі по тексту - ПП) і навпаки. Недоліком зазначеної системи є те, що визначення положення ПП і точки прикладання сили проводиться по неповним даним, оскільки вони маються тільки для кожної сили окремо, що не дає можливості оцінювати ПП для рівнодіючої поперечної сили при швартуванні, готувати план маневрування, що дає значну затримку в прийнятті необхідних рішень по організації керування судном. Найбільш близьким є пристрій для інформаційного забезпечення лоцманської проводки морського судна (Заявка на корисну модель України № u 2012 11569, приор. 08.10.2012, рішення про видачу патенту від 14.01.2013 p.), що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, зв'язані з блоком перерахунку координат на центр ваги зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, блок вхідних даних судна, яке підлягає проводці, який безпосередньо зв'язаний з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором. Індикатор містить дисплей, блок вибору заданого відхилення, блок автоматичного порівняння заданого і автоматичного відхилення, блок аварійної сигналізації, блок розрахунку даних для коригування курсу, блок органів керування, блок контролю небезпеки зіткнення та блок побудови траєкторії руху. Недоліком даного пристрою є те, що він не дає можливості оцінювати положення ПП для рівнодіючої поперечної сили при швартуванні і не дозволяє виконати оптимальну розстановку буксирного забезпечення. В основу корисної моделі поставлена задача створення пристрою для інформаційного забезпечення процесу керування судном під час маневрування шляхом удосконалення системи первинної обробки і розрахунку рівнодіючої сили та її плеча для визначення абсциси ПП і індикації його положення на контурі корпусу для вибору точки прикладання сили від буксирів для забезпечення зниження ризиків виникнення аварійних ситуацій при проводці судна в стислих умовах при використанні буксирних суден для безпечного маневрування. Поставлена задача вирішується тим, що в пристрої для інформаційного забезпечення процесу керування судном під час маневрування, що містить систему первинної обробки, яка містить блок вхідних даних, зв'язану з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, який містить дисплей, блок органів керування, згідно з корисною моделлю, система первинної обробки інформації включає блок вводу параметрів плеча і вектора зовнішніх і внутрішніх сил прикладених до корпусу судна, блок розрахунку рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил, який зв'язаний з блоком розрахунку характеристик плеча точки прикладання рівнодіючої поперечної сили, зв'язаний з блоком розрахунку координат положення полюсу повороту (ПП), підключеного до блока вторинної обробки, безпосередньо зв'язаний з системою вторинної обробки блок вхідних даних про буксирні судна, а індикатор додатково містить блок інформації для судноводія про плече та величину рівнодіючої бокової сили та абсцису ПП, блок візуальної індикації положення ПП на контурі корпуса судна, блок вибору точки прикладання сили упору буксирів на контурі ватерлінії. Причинно-наслідковий зв'язок між сукупністю ознак корисної моделі і технічним результатом, що досягається, полягає у наступному. Блок вхідних даних про внутрішні і зовнішні сили, які використовуються при маневруванні судна, яке підлягає проводці забезпечує зниження ризику виникнення аварійних пригод за рахунок підвищення інформаційного забезпечення, а саме шляхом високоточного розрахунку положення ПП і як результат отримання оптимальної розстановки буксирів при маневруванні. Блок розрахунку рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил забезпечує своєчасне визначення точки прикладання єдиної сили і моменту для визначення положення ПП. Блок розрахунку характеристик плеча точки прикладання рівнодіючої поперечної сили забезпечує визначення положення ПП на корпусі. Блок інформації для судноводія про плече та величину рівнодіючої бокової сили та абсцису ПП забезпечує дані для прийняття рішення по розстановці буксирів. 1 UA 91006 U 5 10 15 20 25 30 Блок інформації про положення ПП та його візуальної індикації забезпечує своєчасний контроль по розстановці буксирів при маневруванні на контурі ватерлінії. Суть корисної моделі пояснюється кресленнями. На фіг. 1 - блок-схема пристрою; фіг. 2 графічне зображення розташування сил відносно центра ваги G. Пристрій для інформаційного забезпечення процесу керування судном під час маневрування включає систему первинної обробки, яка містить блок вводу параметрів плеча і вектора зовнішніх і внутрішніх сил прикладених до корпусу судна 1, блок розрахунку рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил 2, який зв'язаний з блоком розрахунку характеристик плеча точки прикладання рівнодіючої поперечної сили 3, зв'язаний з блоком розрахунку координат положення ПП 4, який підключений до блока вторинної обробки 5 та блок вхідних даних про буксирні судна 6, безпосередньо зв'язаний з системою вторинної обробки 5, які використовуються при маневруванні. Система вторинної обробки 5 містить електрону обчислювальну машину (далі - ЕОМ), яка визначає розташування буксирних суден та їх оптимізацію, зв'язану з індикатором, що має дисплей 7, блок інформації для судноводія про плече та величину рівнодіючої бокової сили та абсцису ПП 8, яка необхідна для прийняття рішення, блок візуальної індикації положення ПП на контурі корпуса судна і вибору точки прикладання сили упору буксирів на контурі ватерлінії 9 для формування групи буксирів, блок органів керування 10. Пристрій для інформаційного забезпечення маневрування морського судна в стислих умовах працює наступним чином. При плануванні маневрування у системі первинної обробки від датчика зовнішніх і внутрішніх сил, прикладених до корпусу судна 1 дані надходять у блок розрахунку 2 рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил. В результаті система отримує вихідні дані для розрахунку характеристик плеча точки прикладання рівнодіючої поперечної сили 3, по результатам якої визначається координати ПП 4. Після цього сигнал надходить на ЕОМ 6 і на індикаторі отримують необхідну інформацію по розстановці буксирів. Сюди ж поступає інформація по буксирному забезпеченню 5 і з допомогою блока органів керування 10 проводиться оптимальна розстановка буксирів 9. При зміні ситуації виконується розрахунок даних для коригування розстановки з допомогою органів керування 10. Принцип дії приладу засновано на розрахунку рівнодіючої поперечної сили по наступним залежностям. n P рів P1 sin 1 P2 sin 2 ... Pi sin i ...Pn sin n (1) i1 де Pрів - рівнодіюча поперечних сил; 35 P1, P2,...Pi..., Pn - сила, прикладена від буксирів, поперечна сила гвинта, сила від руля та підрулючого пристрою з належним знаком, + в сторону правого борту, - в сторону лівого (Фіг. 2); 1, 2,...,i,...,n - кут між діаметральною площиною і напрямом дії сили. Суму моментів відносно центра ваги G визначимо по залежностям n M P sin P sin 1 1 1 2 2 2 ... Pi sin i i ...Pn sin n n (2) i1 40 де - 1, 2,...i..., n - безрозмірне плече, / L ; L - довжина судна між перпендикулярами. Точку прикладання рівнодіючої поперечної сили визначимо по наступній залежності n XР M / P рів (3) i1 Положення полюса повороту можна розрахувати з достовірністю R2 0,999 : по залежностям 45 3 2 18,11ХР 27,44ХР 14,05ХР 2,576; для 0,5 ХР 0,15 для 0,15 ХР 0 0,149 ХР 0,005 ; (4) XП для 0 ХР 0,15 0,149 ХР 0,005 ; 18,11Х3 27,44Х2 14,05Х 2,576; для 0,15 Х 0,5 Р Р Р Р Відстеження змін відхилення від планової розстановки буксирів дозволяє отримувати інформацію стосовно необхідності зміни плану маневрування без затримок, притаманних приладам, що оцінюють відхилення за показниками, що спостерігаються. 2 UA 91006 U Застосування даного пристрою дозволить судноводію оперативно управляти рухом судна, шляхом контролю точки ПП, координати якої визначені високоточним способом з урахуванням розстановки буксирів, кута перекладки руля і режиму роботи головного двигуна вибраного з запасом, для того щоб скоригувати рух, коли виникають непередбачені ситуації. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 Пристрій для інформаційного забезпечення процесу керування судном під час маневрування, що містить систему первинної обробки, яка містить блок вхідних даних, зв'язану з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, який містить дисплей, блок органів керування, який відрізняється тим, що система первинної обробки інформації має блок вводу параметрів плеча і вектора зовнішніх і внутрішніх сил прикладених до корпусу судна, блок розрахунку рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил, який зв'язаний з блоком розрахунку характеристик плеча точки прикладання рівнодіючої поперечної сили, зв'язаний з блоком розрахунку координат положення полюсу повороту (ПП), підключеного до блока вторинної обробки, безпосередньо зв'язаний з системою вторинної обробки блок вхідних даних про буксирні судна, а індикатор додатково містить блок інформації для судноводія про плече та величину рівнодіючої бокової сили та абсцису ПП, блок візуальної індикації положення ПП на контурі корпусу судна, блок вибору точки прикладання сили упору буксирів на контурі ватерлінії. Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюHolikov Volodymyr Voldymyrovych
Автори російськоюГоликов Владимир Владимирович
МПК / Мітки
МПК: G08G 3/00
Мітки: маневрування, інформаційного, судном, процесу, пристрій, забезпечення, керування
Код посилання
<a href="https://ua.patents.su/5-91006-pristrijj-dlya-informacijjnogo-zabezpechennya-procesu-keruvannya-sudnom-pid-chas-manevruvannya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для інформаційного забезпечення процесу керування судном під час маневрування</a>
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення
Номер патенту: 89389
Опубліковано: 25.04.2014
Автори: Голіков Володимир Володимирович, Мальцев Анатолій Сідорович, Мамонтов Володимир Володимирович, Сафін Ігор Вікторович
МПК: G08G 3/00
Мітки: надмірного, судном, пристрій, управління, процесу, наближення, небезпечного, інформаційного, забезпечення
Формула / Реферат:
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення, що включає систему первинної обробки, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок органів керування, який відрізняється тим, що система первинної обробки містить блок даних про координати суден, що спостерігаються, блок розрахунку відстані від власного судна...
Пристрій для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту
Номер патенту: 89382
Опубліковано: 25.04.2014
Автори: Мамонтов Володимир Володимирович, Голіков Володимир Володимирович
МПК: G08G 3/00
Мітки: маневрування, розрахунку, буксирів, кількості, гарантованої, необхідної, безпеки, пристрій, порту
Формула / Реферат:
Пристрій для розрахунку необхідної кількості буксирів для гарантованої безпеки маневрування в порту, що містить систему первинної обробки інформації, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей та блок органів керування, який відрізняється тим, що система первинної обробки інформації містить блок поточної і припустимої швидкості руху по правилах порту, датчики курсу, кутової...
Пристрій для інформаційного забезпечення лоцманської проводки морського судна
Номер патенту: 78679
Опубліковано: 25.03.2013
Автори: Соколенко Василь Іннокентійович, Мальцев Анатолій Сідорович, Ворохобін Ігор Ігорович, Голіков Володимир Володимирович
МПК: B63B 49/00, G08G 3/00
Мітки: забезпечення, інформаційного, проводки, морського, пристрій, лоцманської, судна
Формула / Реферат:
Пристрій для інформаційного забезпечення лоцманської проводки морського судна, що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, зв'язані з блоком перерахунку координат на центр ваги, зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, система...
Спосіб інформаційного забезпечення керування польотами авіації
Номер патенту: 31507
Опубліковано: 10.04.2008
Автори: Охрименко Максим Юрійович, Обод Іван Іванович
МПК: G01S 13/91
Мітки: польотами, керування, інформаційного, забезпечення, авіації, спосіб
Формула / Реферат:
Спосіб інформаційного забезпечення керування польотами авіації, який полягає в тому, що за допомогою розосереджених систем спостереження, включених до єдиної інформаційної мережі, збирають та обробляють інформацію про повітряну обстановку, формують карту локальної повітряної обстановки, і на основі цього формують загальну карту повітряної обстановки, яку видають споживачам, який відрізняється тим, що спочатку формують єдину шкалу часу мережі...
Спосіб гідродинамічного руху і керування судном
Номер патенту: 58013
Опубліковано: 15.07.2003
Автор: Гречко Микола Пилипович
МПК: B63H 11/00
Мітки: спосіб, судном, керування, гідродинамічного, руху
Формула / Реферат:
Спосіб гідродинамічного руху і керування судном, що включає перетворення енергії первинного двигуна за допомогою насоса і сопла в кінетичну енергію струменя рідини, який відрізняється тим, що за допомогою сопла направляють струмінь з високою швидкістю в нерухомий криволінійний канал, що плавно змінюючи напрямок руху струменя на кут не більший за 180°, перетворює відцентрові сили струменя, що діють на увігнуту стінку каналу, у силу рушійну...
Попередній патент: Спосіб розробки екзаменаційного зразка з ультразвукового методу неруйнівного контролю
Наступний патент: Качалка-самокат
Випадковий патент: Збільшення пропускної здатності в бездротовому зв'язку