Пристрій для інформаційного забезпечення лоцманської проводки морського судна
Номер патенту: 78679
Опубліковано: 25.03.2013
Автори: Соколенко Василь Іннокентійович, Мальцев Анатолій Сідорович, Ворохобін Ігор Ігорович, Голіков Володимир Володимирович

Формула / Реферат
Пристрій для інформаційного забезпечення лоцманської проводки морського судна, що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, зв'язані з блоком перерахунку координат на центр ваги, зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, система первинної обробки зв'язана з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, що містить дисплей, блок вибору заданого відхилення, блок автоматичного порівняння заданого і автоматичного відхилення, блок аварійної сигналізації, блок розрахунку даних для коригування курсу, блок органів керування, який відрізняється тим, що система первинної обробки додаткового забезпечена блоком вхідних даних судна, яке підлягає проводці, який безпосередньо зв'язаний з системою вторинної обробки, а індикатор додатково містить блок контролю небезпеки зіткнення та блок побудови траєкторії руху.
Текст
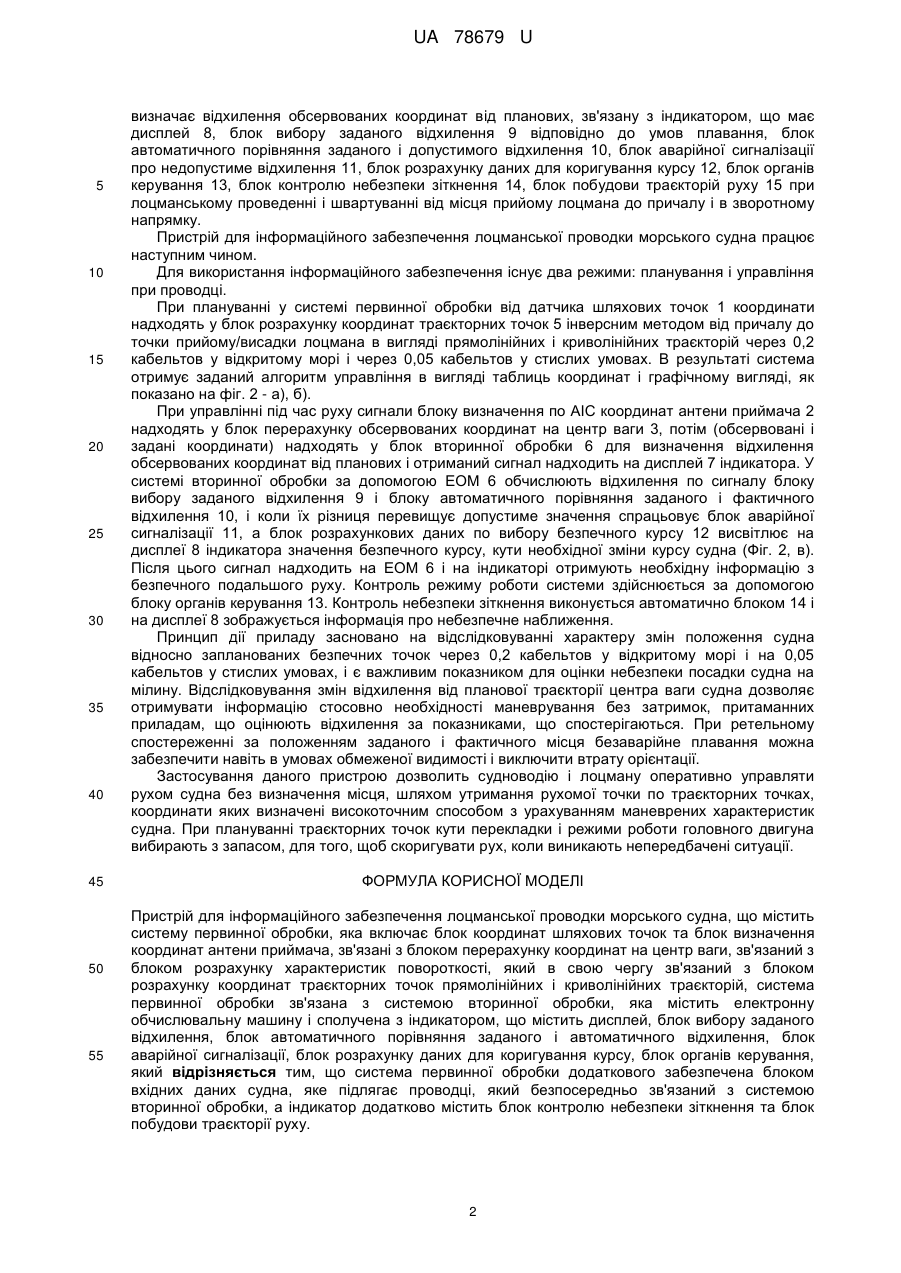
Реферат: Пристрій для інформаційного забезпечення лоцманської проводки морського судна містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, блок перерахунку координат на центр ваги, блок розрахунку характеристик повороткості, блок розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій. При цьому система первинної обробки додатково забезпечена блоком вхідних даних судна, яке підлягає проводці, який безпосередньо зв'язаний з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, що містить дисплей, блок вибору заданого відхилення, блок автоматичного порівняння заданого і автоматичного відхилення, блок аварійної сигналізації, блок розрахунку даних для коригування курсу, блок органів керування, та, додатково, блок контролю небезпеки зіткнення та блок побудови траєкторії руху. UA 78679 U (12) UA 78679 U UA 78679 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до засобів інформаційного забезпечення управління рухом судна при лоцманському проведенні і може бути використана як засіб автоматичного планування заданого алгоритму управління рухом суден і управління при прямолінійному і криволінійному русі. Найбільш близьким по технічній суті є пристрій для попередження посадки судна на мілину (KM України № 57713, МПК 9 G08G 3/00, опубл. 10.03.2011, бюл. № 5), що містить блок координат шляхових точок, блок розрахунку кута повороту, блок вибору кута перекладки руля, блок розрахунку координат шляхових точок, які входять в систему первинної обробки, пов'язану з системою вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення траєкторії судна, блок органів керування. Система первинної обробки інформації містить блок розрахунку координат траєкторії руху між шляховими точками суден на підставі інформації, яка надходить з блока визначення шляхових точок і параметрів повороткості, який підключено до системи вторинної обробки і індикації координат шляху судна. Недоліком зазначеної системи є те, що визначення маневрових характеристик і планування траєкторії проводиться по повним даним, які маються на судні, і не завжди відомі лоцману, крім того, неможливо оцінити небезпеку зіткнення, планувати траєкторію руху при швартуванні, готувати лоцманський план проводки, що дає значну затримку в прийнятті необхідних рішень з маневрування. В основу корисної моделі поставлено задачу створення пристрою для інформаційного забезпечення лоцманської проводки морського судна, шляхом удосконалення системи первинної обробки та індикатора небезпеки зіткнення забезпечити зниження ризиків виникнення аварійних ситуацій при проводці судна в складних навігаційних умовах та в умовах обмеженої видимості при маневруванні. Поставлена задача вирішується тим, що в пристрої для інформаційного забезпечення лоцманської проводки морського судна, що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, що зв'язані з блоком перерахунку координат на центр ваги, який зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, система первинної обробки зв'язана з системою вторинної обробки, яка містить електронну обчислювальну машину, сполучену з індикатором, що містить дисплей, блок вибору заданого відхилення, блок автоматичного порівняння заданого і автоматичного відхилення, блок аварійної сигналізації, блок розрахунку даних для коригування курсу, блок органів керування, згідно з корисною моделлю, система первинної обробки додаткового забезпечена блоком вхідних даних судна, яке підлягає проводці, який зв'язаний безпосередньо з системою вторинної обробки, а індикатор додатково містить блок контролю небезпеки зіткнення та блок побудови траєкторії руху. Причинно-наслідковий зв'язок між сукупністю ознак корисної моделі і технічним результатом, що досягається, полягає у наступному. Блок вхідних даних судна, яке підлягає проводці, забезпечує зниження ризику виникнення аварійних пригод за рахунок підвищення інформаційного забезпечення, а саме шляхом високоточного розрахунку маневрових характеристик і, як результат, отримання оптимальної траєкторії. Блок контролю небезпеки зіткнення забезпечує своєчасне визначення моменту виникнення надмірного наближення і розвитку аварійної ситуації. Блок побудови траєкторії руху забезпечує оптимальний заданий алгоритм управління судном в вигляді матриць траєкторних точок прямолінійних і криволінійних відрізків шляху для безпечного руху. Суть корисної моделі пояснюється кресленнями. На фіг. 1 - блок-схема пристрою; фіг. 2 трансформація графічного зображення заданого і фактичного шляху: а) - за даними блоку 1, б) за даними блоку 6, в) - на індикаторі 7 при русі. Пристрій для інформаційного забезпечення лоцманської проводки морського судна має систему первинної обробки, що містить блок координат шляхових точок переходу судна 1, блок визначення по АІС координат антени приймача 2, які зв'язані з блоком перерахунку обсервованих координат на центр ваги 3, зв'язаного з блоком розрахунку характеристик повороткості 4, у свою чергу зв'язаного з блоком розрахунку координат траєкторних точок 5 прямолінійних і криволінійних траєкторій через 0,2 кабельтов у відкритому морі і через 0,05 кабельтов у стислих умовах, підключеного до системи вторинної обробки 6 та безпосередньо зв'язаний з системою вторинної обробки 6 блок вхідних даних судна 7, яке підлягає проводці. Система вторинної обробки містить електрону обчислювальну машину(далі - ЕОМ) 6, яка 1 UA 78679 U 5 10 15 20 25 30 35 40 45 50 55 визначає відхилення обсервованих координат від планових, зв'язану з індикатором, що має дисплей 8, блок вибору заданого відхилення 9 відповідно до умов плавання, блок автоматичного порівняння заданого і допустимого відхилення 10, блок аварійної сигналізації про недопустиме відхилення 11, блок розрахунку даних для коригування курсу 12, блок органів керування 13, блок контролю небезпеки зіткнення 14, блок побудови траєкторій руху 15 при лоцманському проведенні і швартуванні від місця прийому лоцмана до причалу і в зворотному напрямку. Пристрій для інформаційного забезпечення лоцманської проводки морського судна працює наступним чином. Для використання інформаційного забезпечення існує два режими: планування і управління при проводці. При плануванні у системі первинної обробки від датчика шляхових точок 1 координати надходять у блок розрахунку координат траєкторних точок 5 інверсним методом від причалу до точки прийому/висадки лоцмана в вигляді прямолінійних і криволінійних траєкторій через 0,2 кабельтов у відкритому морі і через 0,05 кабельтов у стислих умовах. В результаті система отримує заданий алгоритм управління в вигляді таблиць координат і графічному вигляді, як показано на фіг. 2 - а), б). При управлінні під час руху сигнали блоку визначення по АІС координат антени приймача 2 надходять у блок перерахунку обсервованих координат на центр ваги 3, потім (обсервовані і задані координати) надходять у блок вторинної обробки 6 для визначення відхилення обсервованих координат від планових і отриманий сигнал надходить на дисплей 7 індикатора. У системі вторинної обробки за допомогою ЕОМ 6 обчислюють відхилення по сигналу блоку вибору заданого відхилення 9 і блоку автоматичного порівняння заданого і фактичного відхилення 10, і коли їх різниця перевищує допустиме значення спрацьовує блок аварійної сигналізації 11, а блок розрахункових даних по вибору безпечного курсу 12 висвітлює на дисплеї 8 індикатора значення безпечного курсу, кути необхідної зміни курсу судна (Фіг. 2, в). Після цього сигнал надходить на ЕОМ 6 і на індикаторі отримують необхідну інформацію з безпечного подальшого руху. Контроль режиму роботи системи здійснюється за допомогою блоку органів керування 13. Контроль небезпеки зіткнення виконується автоматично блоком 14 і на дисплеї 8 зображується інформація про небезпечне наближення. Принцип дії приладу засновано на відслідковуванні характеру змін положення судна відносно запланованих безпечних точок через 0,2 кабельтов у відкритому морі і на 0,05 кабельтов у стислих умовах, і є важливим показником для оцінки небезпеки посадки судна на мілину. Відслідковування змін відхилення від планової траєкторії центра ваги судна дозволяє отримувати інформацію стосовно необхідності маневрування без затримок, притаманних приладам, що оцінюють відхилення за показниками, що спостерігаються. При ретельному спостереженні за положенням заданого і фактичного місця безаварійне плавання можна забезпечити навіть в умовах обмеженої видимості і виключити втрату орієнтації. Застосування даного пристрою дозволить судноводію і лоцману оперативно управляти рухом судна без визначення місця, шляхом утримання рухомої точки по траєкторних точках, координати яких визначені високоточним способом з урахуванням маневрених характеристик судна. При плануванні траєкторних точок кути перекладки і режими роботи головного двигуна вибирають з запасом, для того, щоб скоригувати рух, коли виникають непередбачені ситуації. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Пристрій для інформаційного забезпечення лоцманської проводки морського судна, що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, зв'язані з блоком перерахунку координат на центр ваги, зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, система первинної обробки зв'язана з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, що містить дисплей, блок вибору заданого відхилення, блок автоматичного порівняння заданого і автоматичного відхилення, блок аварійної сигналізації, блок розрахунку даних для коригування курсу, блок органів керування, який відрізняється тим, що система первинної обробки додаткового забезпечена блоком вхідних даних судна, яке підлягає проводці, який безпосередньо зв'язаний з системою вторинної обробки, а індикатор додатково містить блок контролю небезпеки зіткнення та блок побудови траєкторії руху. 2 UA 78679 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for information support of marine vessel pilotage
Автори англійськоюMaltsev Anatolii Sydorovych, Vorokhobin Ihor Ihorovych, Holikov Volodymyr Voldymyrovych, Sokolenko Vasyl Inokentiiovych
Назва патенту російськоюУстройство для информационного обеспечения лоцманской проводки морского судна
Автори російськоюМальцев Анатолий Сидорович, Ворохобин Игорь Игорьевич, Голиков Владимир Владимирович, Соколенко Василий Инокентьевич
МПК / Мітки
МПК: G08G 3/00, B63B 49/00
Мітки: лоцманської, проводки, пристрій, інформаційного, морського, судна, забезпечення
Код посилання
<a href="https://ua.patents.su/5-78679-pristrijj-dlya-informacijjnogo-zabezpechennya-locmansko-provodki-morskogo-sudna.html" target="_blank" rel="follow" title="База патентів України">Пристрій для інформаційного забезпечення лоцманської проводки морського судна</a>
Пристрій для попередження посадки судна на мілину
Номер патенту: 57713
Опубліковано: 10.03.2011
Автори: Мальцев Анатолій Сідорович, Ворохобін Ігор Ігорович, Соколенко Василь Інокентійович
МПК: G08G 3/00
Мітки: попередження, пристрій, судна, посадки, мілину
Формула / Реферат:
Пристрій для попередження посадки судна на мілину, що містить блок координат шляхових точок, блок розрахунку кута повороту, блок вибору кута перекладки руля, блок розрахунку координат шляхових точок, включаючи криволінійну траєкторію при повороті, а також систему вторинної обробки, яка містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення траєкторії судна, блок органів керування, який...
Спосіб інформаційного забезпечення користувачів
Номер патенту: 58925
Опубліковано: 26.04.2011
Автори: Свид Ірина Вікторівна, Обод Іван Іванович, Безрук Валерій Михайлович
МПК: G01S 13/91
Мітки: забезпечення, користувачів, інформаційного, спосіб
Формула / Реферат:
Спосіб інформаційного забезпечення користувачів, який полягає в тому, що за допомогою систем первинної радіолокації визначають просторові координати об'єкта, запитувачем системи вторинної радіолокації випромінюють сигнали запиту у напрямку цього об'єкта, які приймають відповідачем об'єкта, аналізують, формують та випромінюють сигнали відповіді, які приймають запитувачем та аналізують, який відрізняється тим, що визначають просторові...
Лебідковий агрегат для задньої палуби морського дослідницького судна
Номер патенту: 15865
Опубліковано: 30.06.1997
Автор: Тімо Суйстіо
МПК: B66D 1/26
Мітки: агрегат, задньої, судна, палуби, морського, лебідковий, дослідницького
Формула / Реферат:
(57)1. Лебедочный агрегат для задней палубы морского исследовательского судна, содержащий раму, смонтированные на ней по меньшей мере два кабельных катушечных барабана и привод для вращения барабанов, отличающийся тем, что упомянутые барабаны установлены друг над другом, по меньшей мере в одном вертикальном ряду, причем опорный вал одного барабана расположен параллельно опорному валу другого, при этом лебедочный агрегат выполнен с...
Спосіб навантаження великотоннажного морського судна
Номер патенту: 72921
Опубліковано: 27.08.2012
Автор: Баранський Віктор Сергійович
МПК: B63B 35/00
Мітки: судна, навантаження, спосіб, великотоннажного, морського
Формула / Реферат:
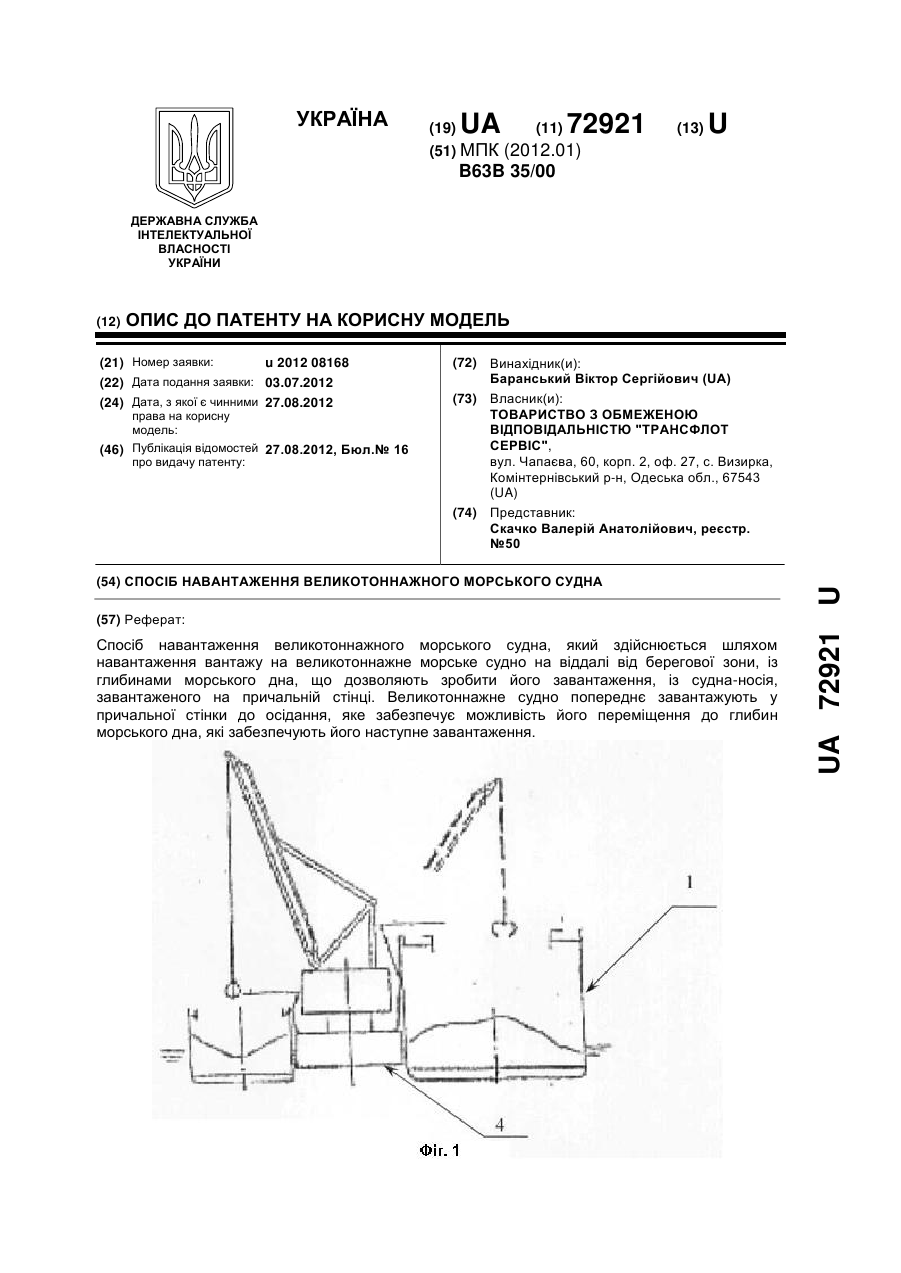
1. Спосіб навантаження великотоннажного морського судна, який здійснюється шляхом навантаження вантажу на великотоннажне морське судно на віддалі від берегової зони, із глибинами морського дна, що дозволяють зробити його завантаження, із судна-носія, завантаженого на причальній стінці, який відрізняється тим, що великотоннажне судно попередньо завантажують біля причальної стінки до осідання, яке забезпечує можливість його переміщення до...
Спосіб інформаційного забезпечення керування польотами авіації
Номер патенту: 31507
Опубліковано: 10.04.2008
Автори: Охрименко Максим Юрійович, Обод Іван Іванович
МПК: G01S 13/91
Мітки: інформаційного, спосіб, авіації, забезпечення, керування, польотами
Формула / Реферат:
Спосіб інформаційного забезпечення керування польотами авіації, який полягає в тому, що за допомогою розосереджених систем спостереження, включених до єдиної інформаційної мережі, збирають та обробляють інформацію про повітряну обстановку, формують карту локальної повітряної обстановки, і на основі цього формують загальну карту повітряної обстановки, яку видають споживачам, який відрізняється тим, що спочатку формують єдину шкалу часу мережі...
Попередній патент: Очисник коренеклубнеплодів конічно-гвинтовий
Наступний патент: Садово-паркова лава
Випадковий патент: Спосіб кількісного визначення аміналону