Пристрій для інформаційного забезпечення процесу управління судном
Номер патенту: 97227
Опубліковано: 10.03.2015
Автори: Бень Андрій Павлович, Товстокорий Олег Миколаєвич, Мальцев Станіслав Едуардович

Формула / Реферат
Пристрій для інформаційного забезпечення процесу управління судном, що містить блок розрахунку координат ПП, блок інформації про положення ПП, блок індикації на контурі судна, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки, яка відрізняється тим, що система первинної обробки містить блоки непереривного виміру тангенціальних швидкостей та розрахунку координат ПП, блок розрахунку точки прикладання рівнодіючої бокової сили, блок неперервної інформації про положення ПП та його візуальної індикації, який підключено до системи вторинної обробки і непереривної індикації ПП.
Текст
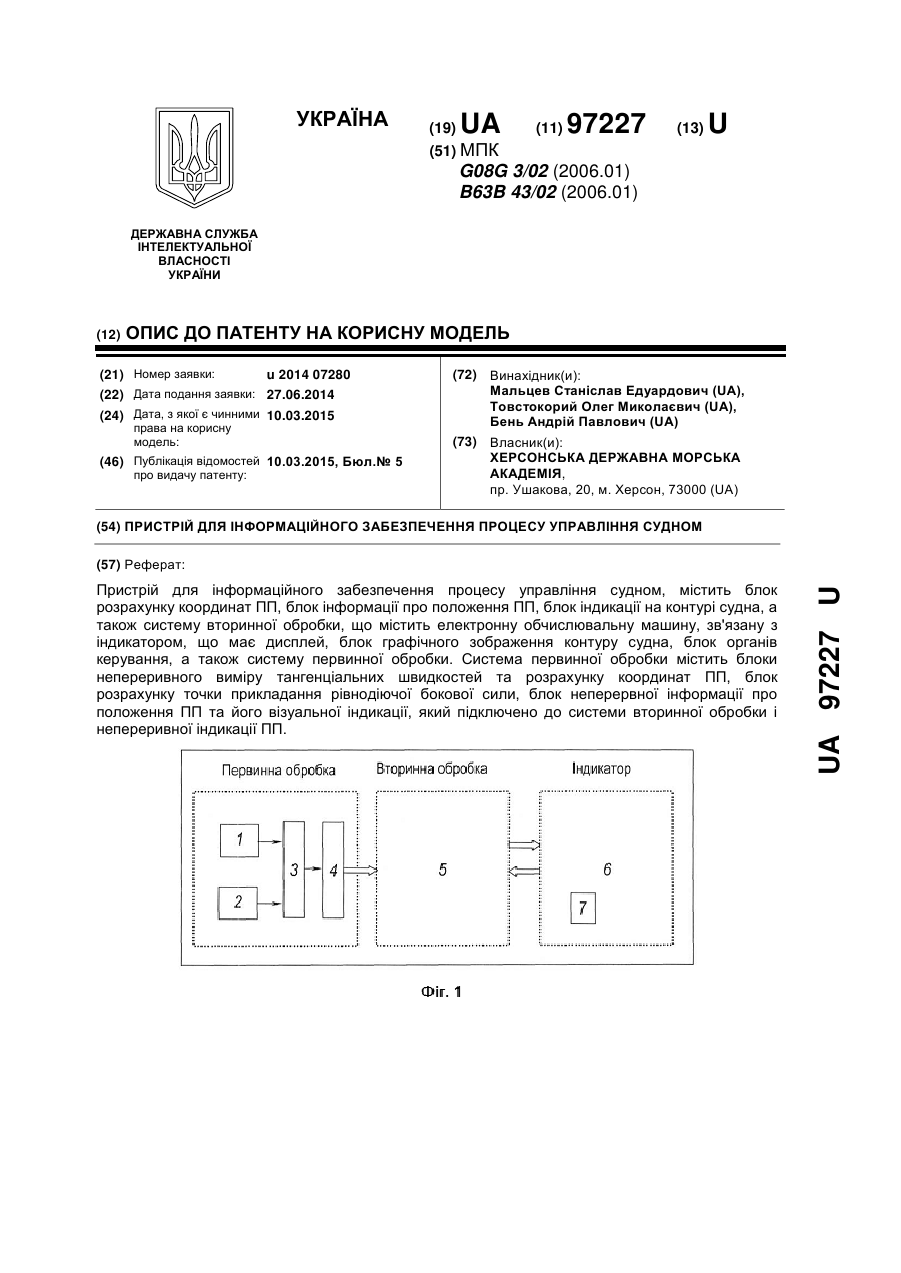
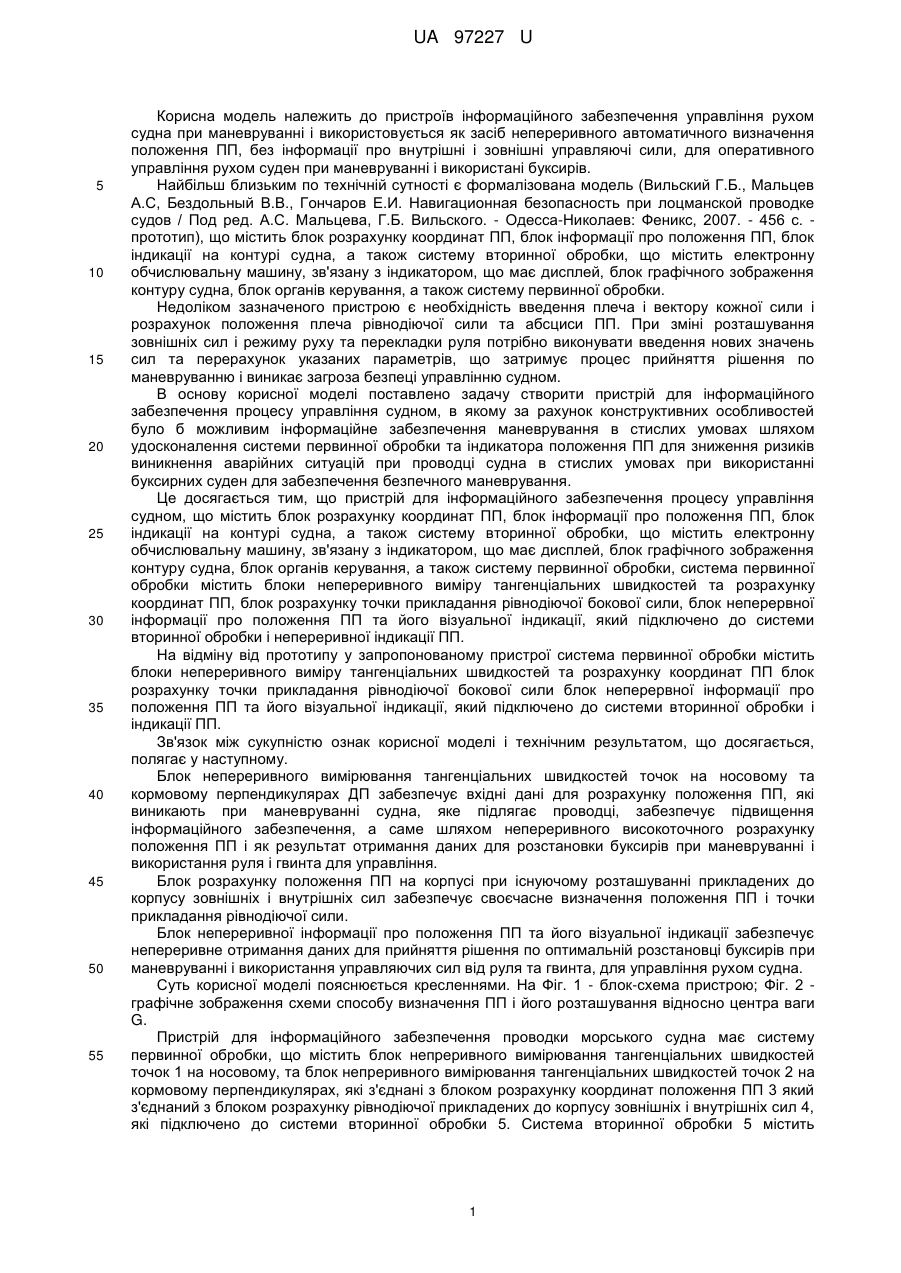
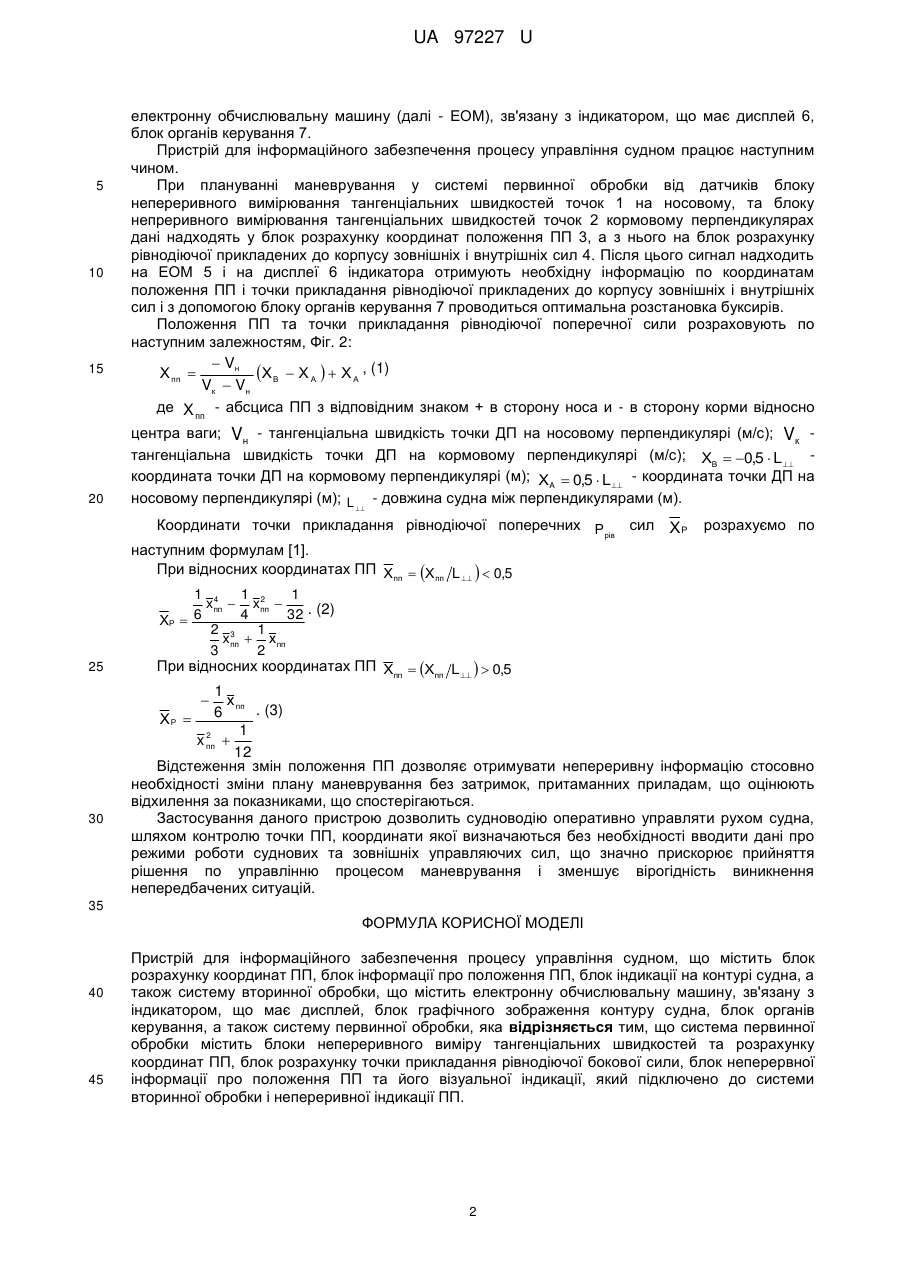
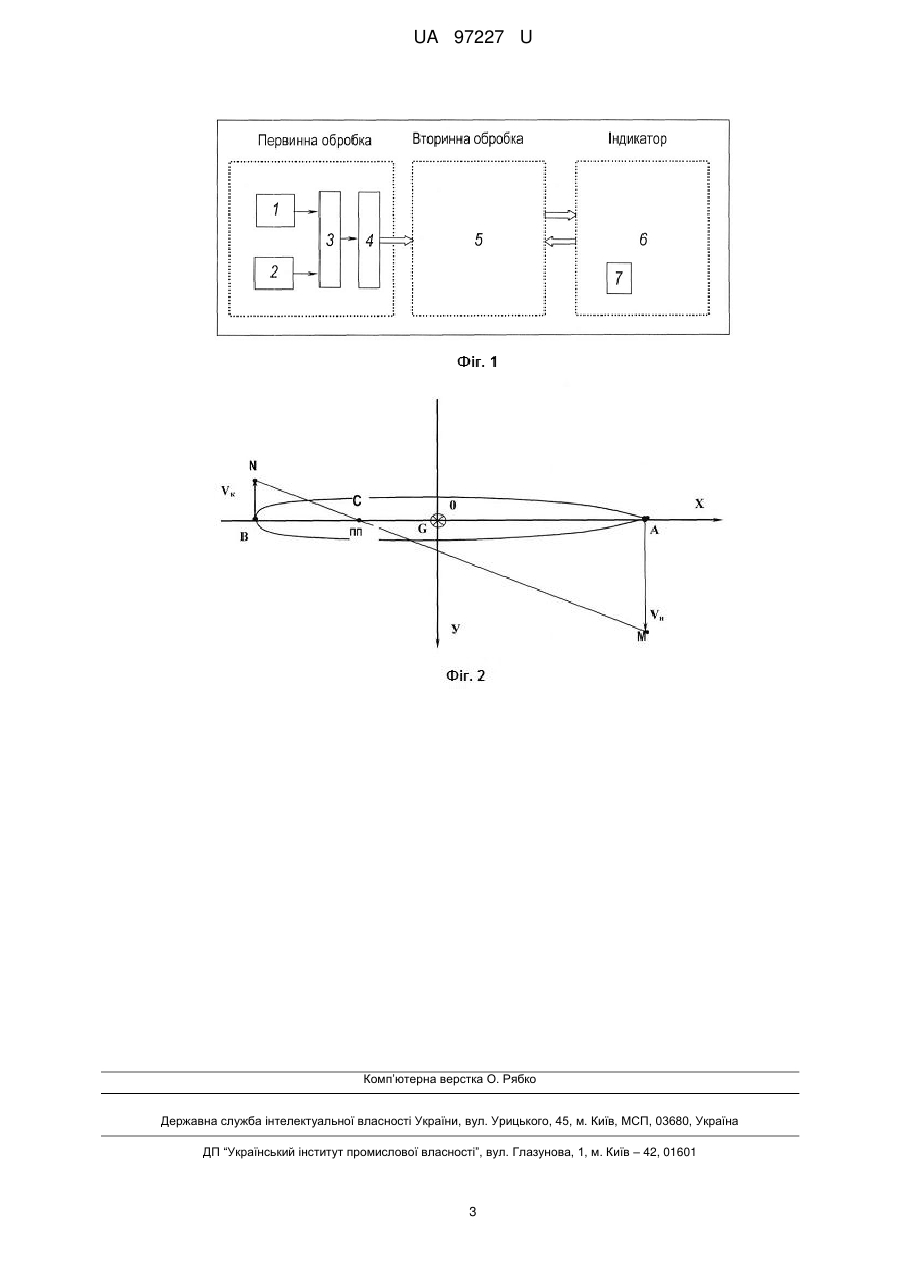
Реферат: UA 97227 U UA 97227 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до пристроїв інформаційного забезпечення управління рухом судна при маневруванні і використовується як засіб непереривного автоматичного визначення положення ПП, без інформації про внутрішні і зовнішні управляючі сили, для оперативного управління рухом суден при маневруванні і використані буксирів. Найбільш близьким по технічній сутності є формалізована модель (Вильский Г.Б., Мальцев А.С, Бездольный В.В., Гончаров Е.И. Навигационная безопасность при лоцманской проводке судов / Под ред. А.С. Мальцева, Г.Б. Вильского. - Одесса-Николаев: Феникс, 2007. - 456 с. прототип), що містить блок розрахунку координат ПП, блок інформації про положення ПП, блок індикації на контурі судна, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки. Недоліком зазначеного пристрою є необхідність введення плеча і вектору кожної сили і розрахунок положення плеча рівнодіючої сили та абсциси ПП. При зміні розташування зовнішніх сил і режиму руху та перекладки руля потрібно виконувати введення нових значень сил та перерахунок указаних параметрів, що затримує процес прийняття рішення по маневруванню і виникає загроза безпеці управлінню судном. В основу корисної моделі поставлено задачу створити пристрій для інформаційного забезпечення процесу управління судном, в якому за рахунок конструктивних особливостей було б можливим інформаційне забезпечення маневрування в стислих умовах шляхом удосконалення системи первинної обробки та індикатора положення ПП для зниження ризиків виникнення аварійних ситуацій при проводці судна в стислих умовах при використанні буксирних суден для забезпечення безпечного маневрування. Це досягається тим, що пристрій для інформаційного забезпечення процесу управління судном, що містить блок розрахунку координат ПП, блок інформації про положення ПП, блок індикації на контурі судна, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки, система первинної обробки містить блоки непереривного виміру тангенціальних швидкостей та розрахунку координат ПП, блок розрахунку точки прикладання рівнодіючої бокової сили, блок неперервної інформації про положення ПП та його візуальної індикації, який підключено до системи вторинної обробки і непереривної індикації ПП. На відміну від прототипу у запропонованому пристрої система первинної обробки містить блоки непереривного виміру тангенціальних швидкостей та розрахунку координат ПП блок розрахунку точки прикладання рівнодіючої бокової сили блок неперервної інформації про положення ПП та його візуальної індикації, який підключено до системи вторинної обробки і індикації ПП. Зв'язок між сукупністю ознак корисної моделі і технічним результатом, що досягається, полягає у наступному. Блок непереривного вимірювання тангенціальних швидкостей точок на носовому та кормовому перпендикулярах ДП забезпечує вхідні дані для розрахунку положення ПП, які виникають при маневруванні судна, яке підлягає проводці, забезпечує підвищення інформаційного забезпечення, а саме шляхом непереривного високоточного розрахунку положення ПП і як результат отримання даних для розстановки буксирів при маневруванні і використання руля і гвинта для управління. Блок розрахунку положення ПП на корпусі при існуючому розташуванні прикладених до корпусу зовнішніх і внутрішніх сил забезпечує своєчасне визначення положення ПП і точки прикладання рівнодіючої сили. Блок непереривної інформації про положення ПП та його візуальної індикації забезпечує непереривне отримання даних для прийняття рішення по оптимальній розстановці буксирів при маневруванні і використання управляючих сил від руля та гвинта, для управління рухом судна. Суть корисної моделі пояснюється кресленнями. На Фіг. 1 - блок-схема пристрою; Фіг. 2 графічне зображення схеми способу визначення ПП і його розташування відносно центра ваги G. Пристрій для інформаційного забезпечення проводки морського судна має систему первинної обробки, що містить блок непреривного вимірювання тангенціальних швидкостей точок 1 на носовому, та блок непреривного вимірювання тангенціальних швидкостей точок 2 на кормовому перпендикулярах, які з'єднані з блоком розрахунку координат положення ПП 3 який з'єднаний з блоком розрахунку рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил 4, які підключено до системи вторинної обробки 5. Система вторинної обробки 5 містить 1 UA 97227 U 5 10 15 20 електронну обчислювальну машину (далі - ЕОМ), зв'язану з індикатором, що має дисплей 6, блок органів керування 7. Пристрій для інформаційного забезпечення процесу управління судном працює наступним чином. При плануванні маневрування у системі первинної обробки від датчиків блоку непереривного вимірювання тангенціальних швидкостей точок 1 на носовому, та блоку непреривного вимірювання тангенціальних швидкостей точок 2 кормовому перпендикулярах дані надходять у блок розрахунку координат положення ПП 3, а з нього на блок розрахунку рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил 4. Після цього сигнал надходить на ЕОМ 5 і на дисплеї 6 індикатора отримують необхідну інформацію по координатам положення ПП і точки прикладання рівнодіючої прикладених до корпусу зовнішніх і внутрішніх сил і з допомогою блоку органів керування 7 проводиться оптимальна розстановка буксирів. Положення ПП та точки прикладання рівнодіючої поперечної сили розраховують по наступним залежностям, Фіг. 2: Vн Х В Х А Х А , (1) Х пп Vк Vн де Х пп - абсциса ПП з відповідним знаком + в сторону носа и - в сторону корми відносно центра ваги; Vн - тангенціальна швидкість точки ДП на носовому перпендикулярі (м/с); Vк тангенціальна швидкість точки ДП на кормовому перпендикулярі (м/с); ХВ 0,5 L координата точки ДП на кормовому перпендикулярі (м); ХA 0,5 L - координата точки ДП на носовому перпендикулярі (м); L - довжина судна між перпендикулярами (м). Координати точки прикладання рівнодіючої поперечних Р сил рів наступним формулам [1]. При відносних координатах ПП Хпп Хпп L 0,5 Х Р розрахуємо по 1 4 1 2 1 xпп xпп 6 4 32 . (2) ХР 2 3 1 xпп хпп 3 2 25 30 При відносних координатах ПП Хпп Хпп L 0,5 1 х пп . (3) 6 ХР 1 2 x пп 12 Відстеження змін положення ПП дозволяє отримувати непереривну інформацію стосовно необхідності зміни плану маневрування без затримок, притаманних приладам, що оцінюють відхилення за показниками, що спостерігаються. Застосування даного пристрою дозволить судноводію оперативно управляти рухом судна, шляхом контролю точки ПП, координати якої визначаються без необхідності вводити дані про режими роботи суднових та зовнішніх управляючих сил, що значно прискорює прийняття рішення по управлінню процесом маневрування і зменшує вірогідність виникнення непередбачених ситуацій. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Пристрій для інформаційного забезпечення процесу управління судном, що містить блок розрахунку координат ПП, блок інформації про положення ПП, блок індикації на контурі судна, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки, яка відрізняється тим, що система первинної обробки містить блоки непереривного виміру тангенціальних швидкостей та розрахунку координат ПП, блок розрахунку точки прикладання рівнодіючої бокової сили, блок неперервної інформації про положення ПП та його візуальної індикації, який підключено до системи вторинної обробки і непереривної індикації ПП. 2 UA 97227 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюBen Andrii Pavlovych
Автори російськоюБень Андрей Павлович
МПК / Мітки
МПК: G08G 3/00
Мітки: процесу, судном, управління, інформаційного, пристрій, забезпечення
Код посилання
<a href="https://ua.patents.su/5-97227-pristrijj-dlya-informacijjnogo-zabezpechennya-procesu-upravlinnya-sudnom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для інформаційного забезпечення процесу управління судном</a>
Пристрій для інформаційного забезпечення процесу керування судном під час маневрування
Номер патенту: 91006
Опубліковано: 25.06.2014
Автори: Мальцев Станіслав Едуардович, Голіков Володимир Володимирович
МПК: G08G 3/00
Мітки: керування, процесу, судном, маневрування, пристрій, забезпечення, інформаційного
Формула / Реферат:
Пристрій для інформаційного забезпечення процесу керування судном під час маневрування, що містить систему первинної обробки, яка містить блок вхідних даних, зв'язану з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, який містить дисплей, блок органів керування, який відрізняється тим, що система первинної обробки інформації має блок вводу параметрів плеча і вектора зовнішніх і внутрішніх...
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення
Номер патенту: 89389
Опубліковано: 25.04.2014
Автори: Голіков Володимир Володимирович, Сафін Ігор Вікторович, Мальцев Анатолій Сідорович, Мамонтов Володимир Володимирович
МПК: G08G 3/00
Мітки: надмірного, наближення, пристрій, забезпечення, управління, судном, небезпечного, процесу, інформаційного
Формула / Реферат:
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення, що включає систему первинної обробки, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок органів керування, який відрізняється тим, що система первинної обробки містить блок даних про координати суден, що спостерігаються, блок розрахунку відстані від власного судна...
Пристрій для інформаційного забезпечення лоцманської проводки морського судна
Номер патенту: 78679
Опубліковано: 25.03.2013
Автори: Соколенко Василь Іннокентійович, Мальцев Анатолій Сідорович, Ворохобін Ігор Ігорович, Голіков Володимир Володимирович
МПК: G08G 3/00, B63B 49/00
Мітки: інформаційного, лоцманської, судна, морського, пристрій, забезпечення, проводки
Формула / Реферат:
Пристрій для інформаційного забезпечення лоцманської проводки морського судна, що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, зв'язані з блоком перерахунку координат на центр ваги, зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, система...
Система інформаційного забезпечення управління потоками відходів фармацевтичного підприємства

Номер патенту: 67416
Опубліковано: 27.02.2012
Автори: Сагайдак-Нікітюк Ріта Василівна, Літвінова Олена В'ячеславівна, Посилкіна Ольга Вікторівна
МПК: G05B 19/00
Мітки: фармацевтичного, підприємства, відходів, управління, потоками, забезпечення, інформаційного, система
Формула / Реферат:
1. Система інформаційного забезпечення управління потоками відходів фармацевтичного підприємства, що включає підсистему обліку відходів фармацевтичного підприємства та підсистему утилізації відходів фармацевтичного підприємства, при цьому обидві підсистеми містять блоки прийому інформації, послідовно зв'язані з блоками формування відповідних баз даних та блоками виведення інформації, яка відрізняється тим, що до її складу додатково включені...
Система інформаційного забезпечення управління потоками відходів підприємства олійно-жирової галузі
Номер патенту: 92417
Опубліковано: 11.08.2014
Автор: Сумець Олександр Михайлович
МПК: G05B 19/04, G05B 19/12, G05B 19/00
Мітки: управління, потоками, система, олійно-жирової, інформаційного, забезпечення, галузі, відходів, підприємства
Формула / Реферат:
1. Система інформаційного забезпечення управління потоками відходів підприємства олійно-жирової галузі, що включає підсистему обліку відходів, підсистему складування відходів, підсистему транспортування відходів, підсистему знищення відходів, підсистему інвентаризації відходів, причому підсистема обліку приймає інформацію з блоків виведення інформації підсистем складування відходів заводу, транспортування відходів підприємства про норми...
Попередній патент: Муфта
Наступний патент: Соляно-часникова приправа
Випадковий патент: Агрегат для оранки грунту