Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення
Номер патенту: 89389
Опубліковано: 25.04.2014
Автори: Голіков Володимир Володимирович, Сафін Ігор Вікторович, Мальцев Анатолій Сідорович, Мамонтов Володимир Володимирович
Формула / Реферат
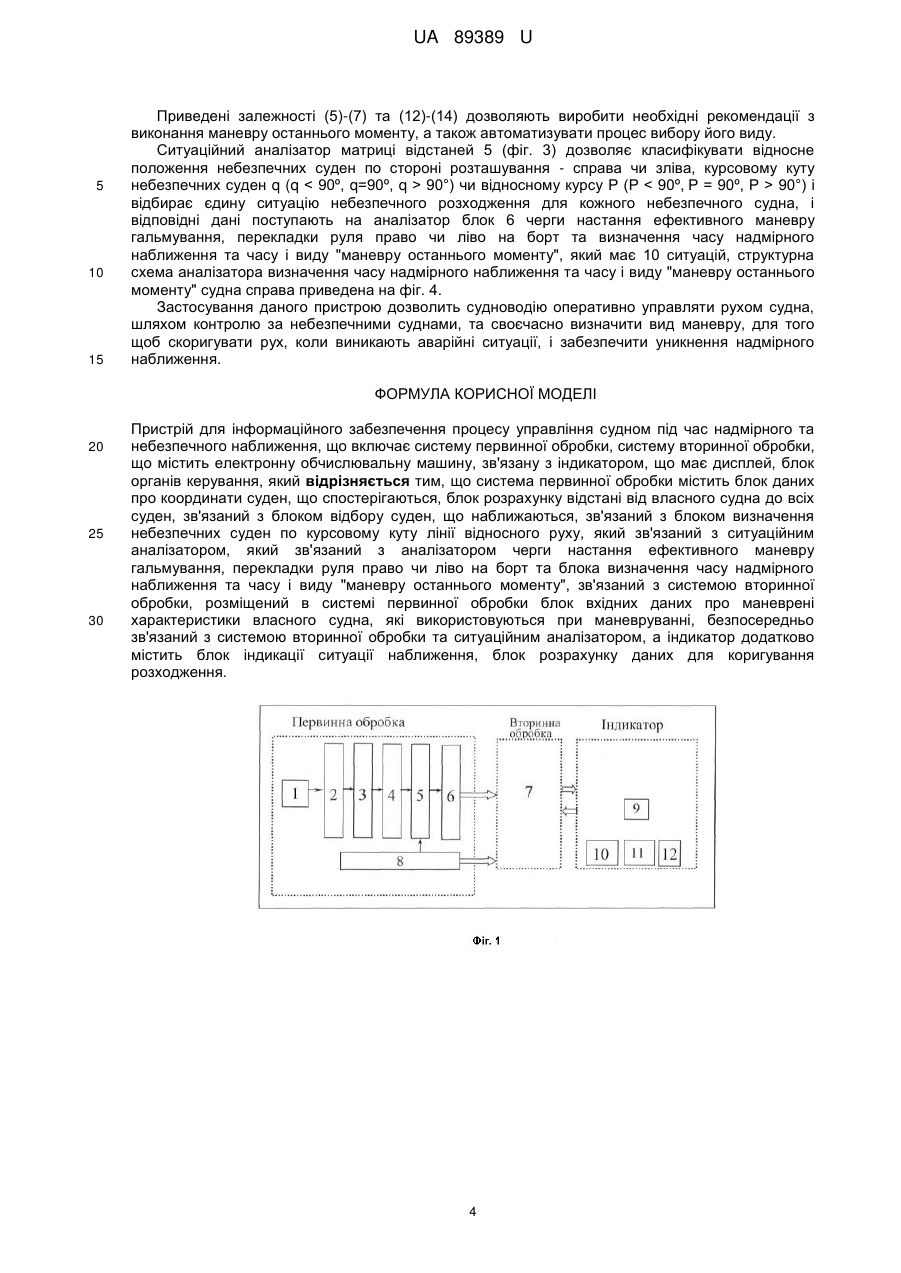
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення, що включає систему первинної обробки, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок органів керування, який відрізняється тим, що система первинної обробки містить блок даних про координати суден, що спостерігаються, блок розрахунку відстані від власного судна до всіх суден, зв'язаний з блоком відбору суден, що наближаються, зв'язаний з блоком визначення небезпечних суден по курсовому куту лінії відносного руху, який зв'язаний з ситуаційним аналізатором, який зв'язаний з аналізатором черги настання ефективного маневру гальмування, перекладки руля право чи ліво на борт та блока визначення часу надмірного наближення та часу і виду "маневру останнього моменту", зв'язаний з системою вторинної обробки, розміщений в системі первинної обробки блок вхідних даних про маневрені характеристики власного судна, які використовуються при маневруванні, безпосередньо зв'язаний з системою вторинної обробки та ситуаційним аналізатором, а індикатор додатково містить блок індикації ситуації наближення, блок розрахунку даних для коригування розходження.
Текст
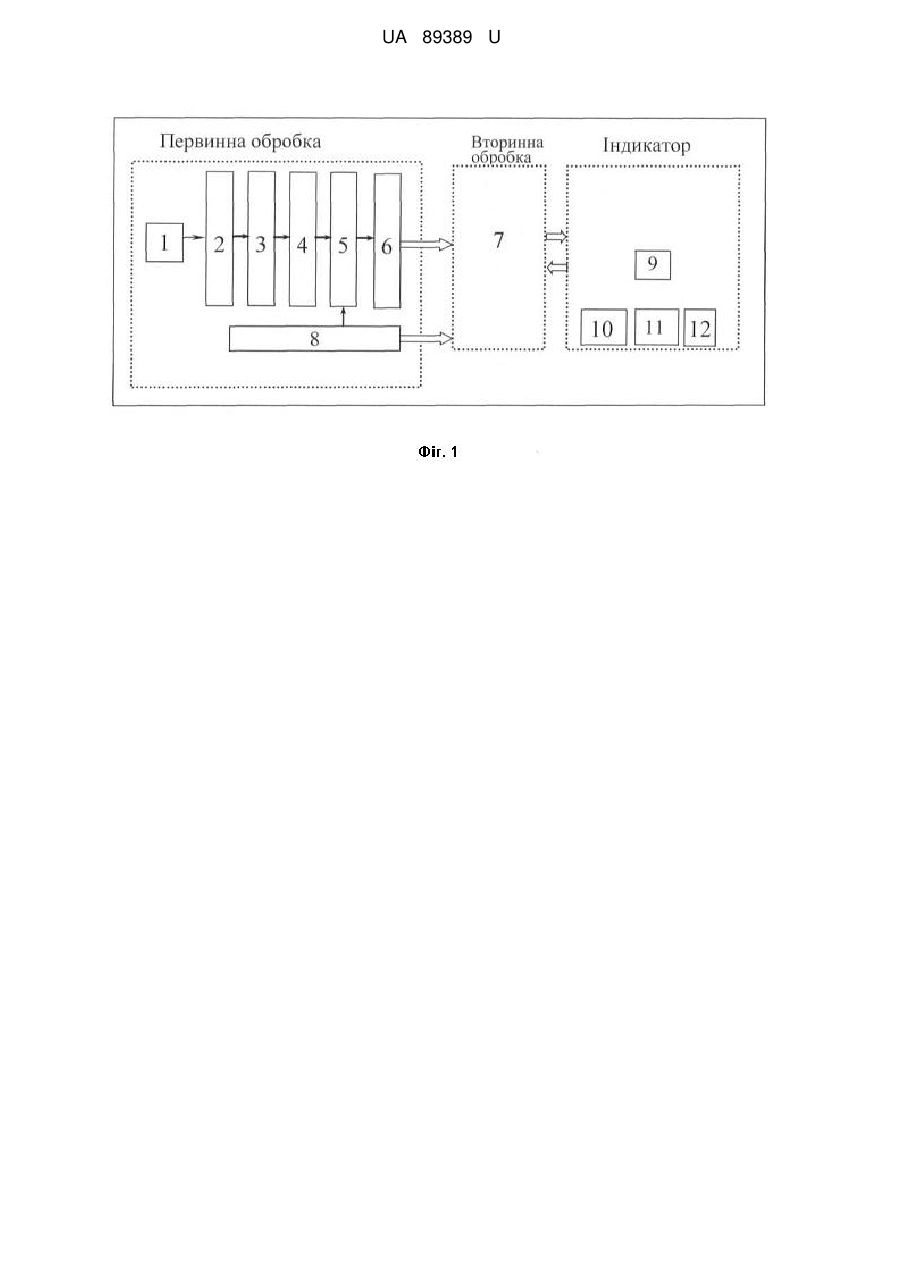
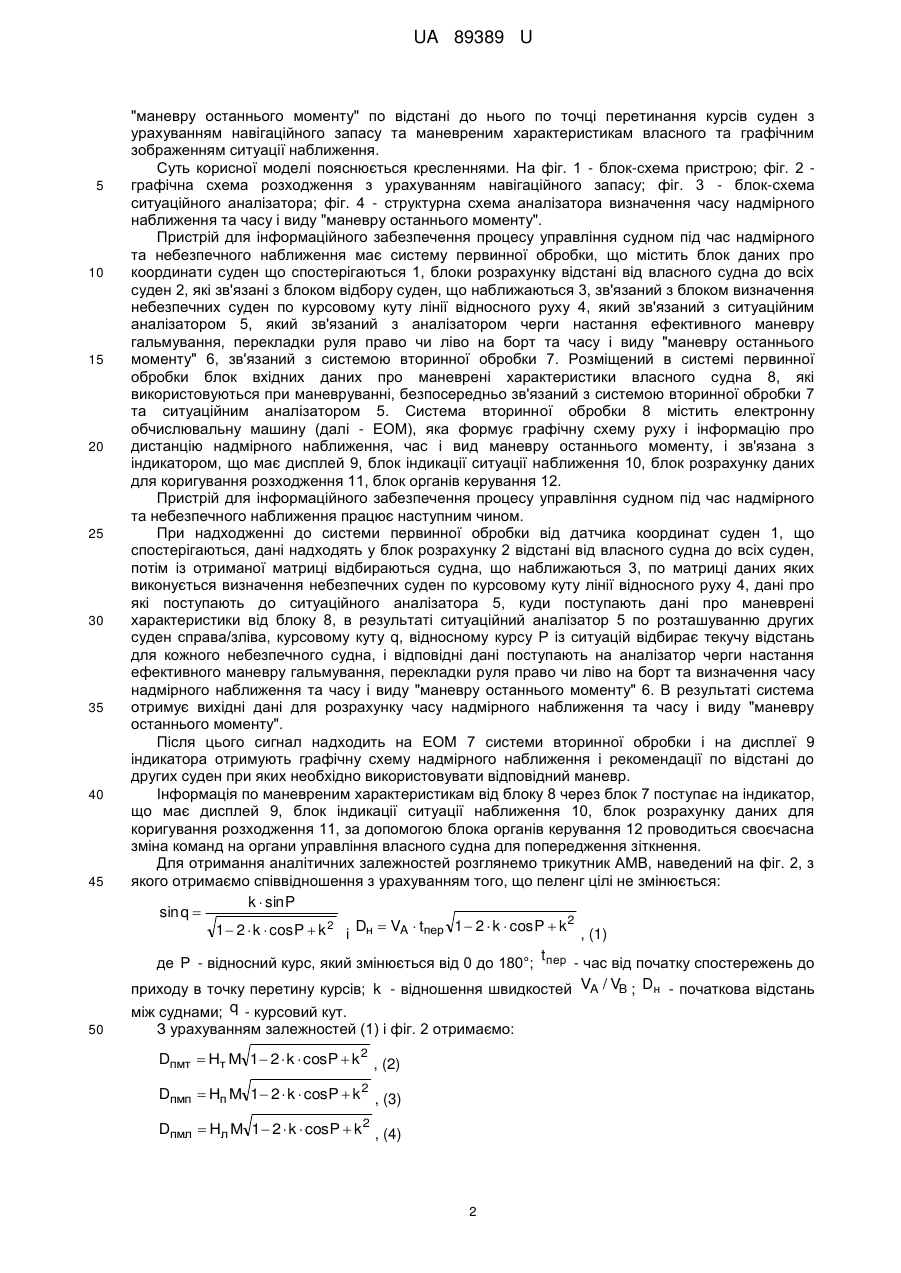
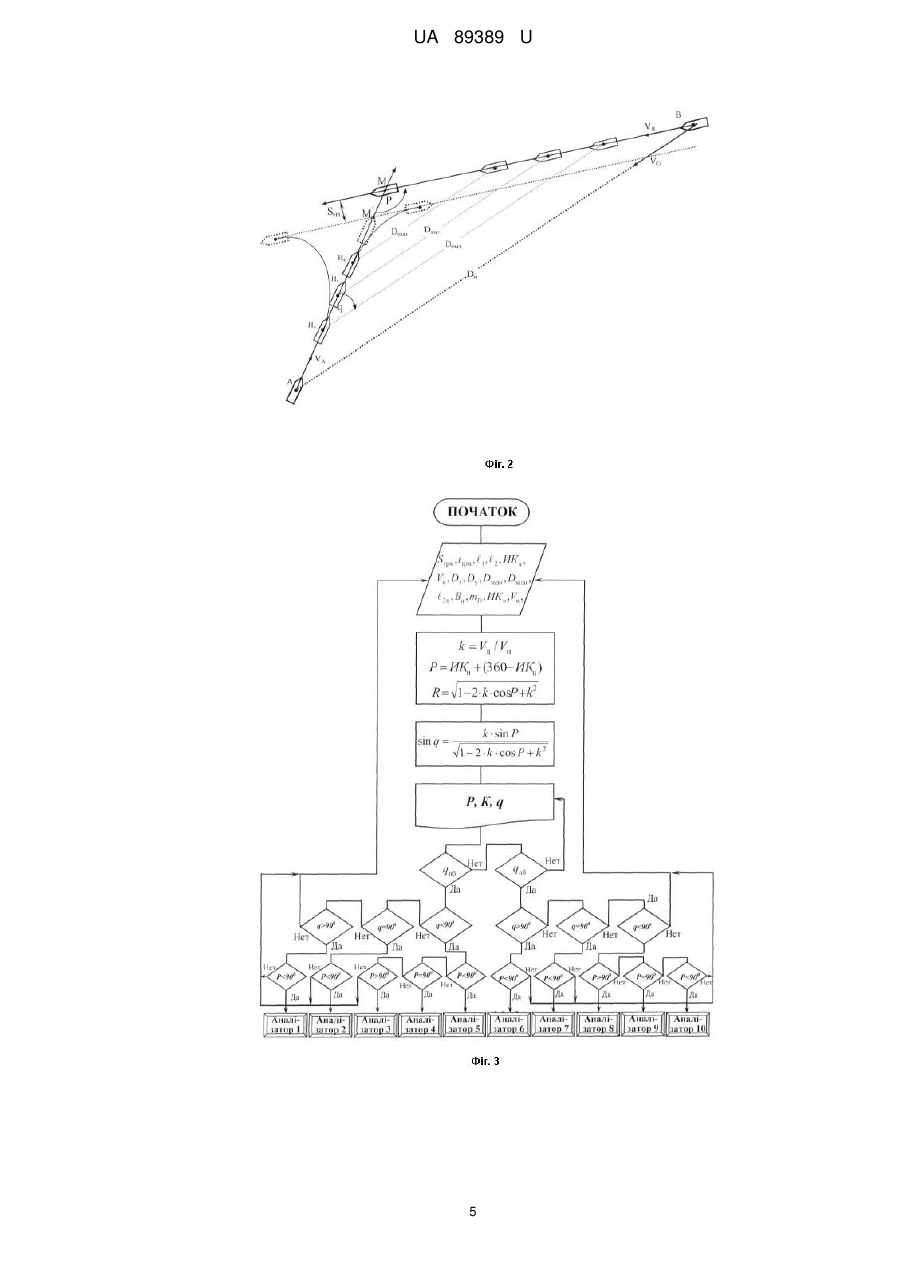
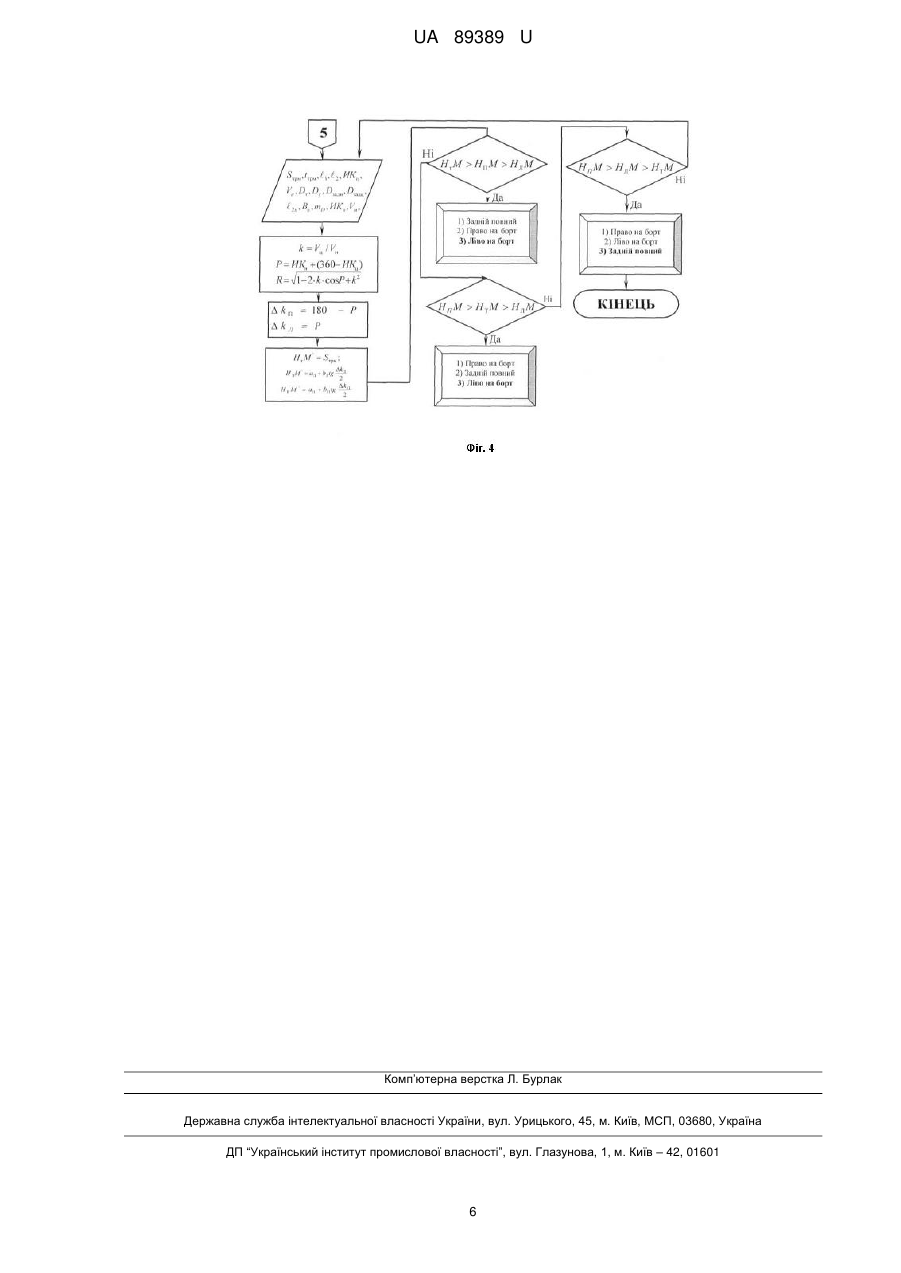
Реферат: Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення, включає систему первинної обробки, систему вторинної обробки, містить електрону обчислювальну машину, зв'язану з індикатором, що має дисплей, блок органів керування. Система первинної обробки містить блок даних про координати суден, що спостерігаються, блок розрахунку відстані від власного судна до всіх суден, зв'язаний з блоком відбору суден, що наближаються, зв'язаний з блоком визначення небезпечних суден по курсовому куту лінії відносного руху, який зв'язаний з ситуаційним аналізатором, який зв'язаний з аналізатором черги настання ефективного маневру гальмування, перекладки руля право чи ліво на борт та блока визначення часу надмірного наближення та часу і виду "маневру останнього моменту", зв'язаний з системою вторинної обробки, розміщений в системі первинної обробки блок вхідних даних про маневрені характеристики власного судна, які використовуються при маневруванні, безпосередньо зв'язаний з системою вторинної обробки та ситуаційним аналізатором, а індикатор додатково містить блок індикації ситуації наближення, блок розрахунку даних для коригування розходження. UA 89389 U (12) UA 89389 U UA 89389 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до засобів автоматизованого управління рухом судна при маневруванні і використовується як засіб автоматичного попередження про небезпеку зіткнення, розрахунку відстані до другого судна і часу до межі зони надмірного та небезпечного наближення і моменту та виду "маневру останнього моменту". Відомий пристрій для попередження зіткнення суден (А.С. СССР № 1604046, приор. 11.05.88, опубл. 1.06.1990), що містить блок порівняння, датчик дальності, датчик пеленга, датчик курсу і датчик швидкості. Недоліком зазначеної системи є те, що вона не виконує аналізу ситуації зони надмірного наближення і моменту та виду "маневру останнього моменту". З цієї причини вона не може використовуватися як система підтримки прийняття рішень по маневруванню, що дає значну затримку в прийнятті необхідних рішень по організації управління судном. Найбільш близьким по технічній суті є пристрій для запобігання зіткненню суден (KM України № 62275, приор. 20.02.2003, опубл. 15.12.2003, Бюл. № 12, МПК 7 G 08 G 3/02), що містить систему первинної обробки, яка містить блок визначення всіх параметрів на загальні прямокутні координати, зв'язаний з автоматичною ідентифікаційною системою, блок перетворення полярних координат на прямокутні координати, зв'язаний з береговою БРЛС, блок заданого алгоритму, блок порівняння розрахованих значень із припустимими, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок органів керування, а також блок графічного зображення для оцінки і вирішення задачі розбіжності між судами, блоки табличної інформації. Недоліками даного пристрою є відсутність: попереднього аналізу відстаней між власним судном і другими, які спостерігаються; даних про маневрові характеристики, що не дозволяє визначити відстань і час, коли наступає надмірне чи небезпечне наближення; можливості заздалегідь визначити вид маневру для попередження зіткнення; алгоритмів визначення небезпеки зіткнення без розрахунку відстані найкоротшого наближення, по параметрам що спостерігаються, що дає значну затримку в прийнятті рішень по маневруванню. В основу корисної моделі поставлено задачу створення навігаційного пристрою для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення шляхом удосконалення системи первинної обробки та індикатора ситуації наближення суден для забезпечення своєчасного попередження аварійних ситуацій при розходженні. Поставлена задача вирішується тим, що в пристрої для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення, що включає систему первинної обробки, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, який має дисплей та блок органів керування, згідно з корисною моделлю, система первинної обробки містить блок даних про координати суден, що спостерігаються, блок розрахунку відстані від власного судна до всіх суден, зв'язаний з блоком відбору суден, що наближаються, що зв'язаний з блоком визначення небезпечних суден по курсовому куту лінії відносного руху, який зв'язаний з ситуаційним аналізатором, який зв'язаний з аналізатором черги настання ефективного маневру гальмування, перекладки руля право чи ліво на борт та визначення часу надмірного наближення та часу і виду "маневру останнього моменту", зв'язаний з системою вторинної обробки, блок вхідних даних про маневрені характеристики власного судна, які використовуються при маневруванні, безпосередньо зв'язаний з системою вторинної обробки та з ситуаційним аналізатором, а індикатор додатково містить блок індикації ситуації наближення та блок розрахунку даних для коригування розходження. Зв'язок між сукупністю ознак корисної моделі і технічним результатом, що досягається, полягає у наступному. Блок вхідних даних про положення суден, маневрові характеристики власного судна забезпечує зниження ризику виникнення аварійних пригод за рахунок підвищення інформаційного забезпечення, а саме шляхом високоточного розрахунку ситуації наближення і як результат отримання оптимального маневру для попередження зіткнення. Блок розрахунку відстані до всіх суден що спостерігаються забезпечує своєчасне визначення суден, які можуть бути небезпечними. Блок вибору суден, що наближаються, та визначення серед них небезпеки зіткнення по курсовому куту лінії відносного руху забезпечує визначення небезпечних суден, та значно скорочує загрузку процесора. Блок інформації про положення небезпечних суден забезпечує отримання даних для прийняття рішення по оптимальному маневру шляхом розрахунку відстані до небезпечного судна і часу досягнення надмірного чи небезпечного наближення і моменту настання та виду 1 UA 89389 U 5 10 15 20 25 30 35 40 45 50 "маневру останнього моменту" по відстані до нього по точці перетинання курсів суден з урахуванням навігаційного запасу та маневреним характеристикам власного та графічним зображенням ситуації наближення. Суть корисної моделі пояснюється кресленнями. На фіг. 1 - блок-схема пристрою; фіг. 2 графічна схема розходження з урахуванням навігаційного запасу; фіг. 3 - блок-схема ситуаційного аналізатора; фіг. 4 - структурна схема аналізатора визначення часу надмірного наближення та часу і виду "маневру останнього моменту". Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення має систему первинної обробки, що містить блок даних про координати суден що спостерігаються 1, блоки розрахунку відстані від власного судна до всіх суден 2, які зв'язані з блоком відбору суден, що наближаються 3, зв'язаний з блоком визначення небезпечних суден по курсовому куту лінії відносного руху 4, який зв'язаний з ситуаційним аналізатором 5, який зв'язаний з аналізатором черги настання ефективного маневру гальмування, перекладки руля право чи ліво на борт та часу і виду "маневру останнього моменту" 6, зв'язаний з системою вторинної обробки 7. Розміщений в системі первинної обробки блок вхідних даних про маневрені характеристики власного судна 8, які використовуються при маневруванні, безпосередньо зв'язаний з системою вторинної обробки 7 та ситуаційним аналізатором 5. Система вторинної обробки 8 містить електронну обчислювальну машину (далі - ЕОМ), яка формує графічну схему руху і інформацію про дистанцію надмірного наближення, час і вид маневру останнього моменту, і зв'язана з індикатором, що має дисплей 9, блок індикації ситуації наближення 10, блок розрахунку даних для коригування розходження 11, блок органів керування 12. Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення працює наступним чином. При надходженні до системи первинної обробки від датчика координат суден 1, що спостерігаються, дані надходять у блок розрахунку 2 відстані від власного судна до всіх суден, потім із отриманої матриці відбираються судна, що наближаються 3, по матриці даних яких виконується визначення небезпечних суден по курсовому куту лінії відносного руху 4, дані про які поступають до ситуаційного аналізатора 5, куди поступають дані про маневрені характеристики від блоку 8, в результаті ситуаційний аналізатор 5 по розташуванню других суден справа/зліва, курсовому куту q, відносному курсу Р із ситуацій відбирає текучу відстань для кожного небезпечного судна, і відповідні дані поступають на аналізатор черги настання ефективного маневру гальмування, перекладки руля право чи ліво на борт та визначення часу надмірного наближення та часу і виду "маневру останнього моменту" 6. В результаті система отримує вихідні дані для розрахунку часу надмірного наближення та часу і виду "маневру останнього моменту". Після цього сигнал надходить на ЕОМ 7 системи вторинної обробки і на дисплеї 9 індикатора отримують графічну схему надмірного наближення і рекомендації по відстані до других суден при яких необхідно використовувати відповідний маневр. Інформація по маневреним характеристикам від блоку 8 через блок 7 поступає на індикатор, що має дисплей 9, блок індикації ситуації наближення 10, блок розрахунку даних для коригування розходження 11, за допомогою блока органів керування 12 проводиться своєчасна зміна команд на органи управління власного судна для попередження зіткнення. Для отримання аналітичних залежностей розглянемо трикутник АМВ, наведений на фіг. 2, з якого отримаємо співвідношення з урахуванням того, що пеленг цілі не змінюється: k sin P sin q 2 1 2 k cos P k 2 і Dн VA tпер 1 2 k cos P k , (1) t де P - відносний курс, який змінюється від 0 до 180°; пер - час від початку спостережень до приходу в точку перетину курсів; k - відношення швидкостей VA / VB ; Dн - початкова відстань між суднами; q - курсовий кут. З урахуванням залежностей (1) і фіг. 2 отримаємо: Dпмт Нт М 1 2 k cosP k 2 , (2) Dпмп Нп М 1 2 k cos P k 2 , (3) Dпмл Нл М 1 2 k cos P k 2 , (4) 2 UA 89389 U 5 10 де Dпмт , Dпмп , Dпмл , - відстань між суднами в момент початку гальмування, подачі команди "право на борт", подачі команди "ліво на борт" відповідно; Нт М - відстань, яку пройде власне судно від моменту подачі команди на задній хід до повної зупинки; Нп М - відстань, яку пройде власне судно, від моменту подачі команди "право на борт" до моменту розбіжності; Нл М - відстань, яку пройде власне судно від моменту подачі команди "ліво на борт" до моменту розбіжності. 2 Позначимо вираз під коренем символом R 1 2k cosP k . З урахуванням залежностей (1) формули (2)-(4) отримають вигляд: DПМТ SТРМ MM R ; (5) k DПМЛ a Л b Л tg Л MM R 2 ; (6) k DПМП aП bП tg П MM R 2 ; (7) 15 где SТРМ - гальмівний шлях для режиму роботи ЗП; a Л , b Л - коефіцієнти повороткості при повороті вправо; aП , bП - коефіцієнти повороткості при повороті вліво; k - кут повороту, який визначається по формулам: k л Р при qпб ; kп 180 Р при qпб . (8) 20 25 k л 180 Р при qлб ; kп Р при qлб . (9) MM - відстань від точки пересічення курсів до лінії безпечного руху, який можна визначити із виразу: S R MM нз k sin P , (10) де Sнз - навігаційний запас. З урахуванням зони безпеки власного та іншого судна формула для розрахунку навігаційного запасу отримає вигляд В P sin P Sнз Lрлс ctg Dзадн Dзадц ц mD 2ц ctg 2 2 sinP q 2 , (11) де Dзадн - зона навігаційної безпеки власного судна; Dзадц - зона навігаційної безпеки іншого судна. Lрлс 30 35 40 - відстань від антени РЛС до крайньої точки по носі судна; mD - середня квадратична похибка визначення відстаней; 2ц - прямий зсув цілі при перекладці руля на борт. Оскільки величина зсуву цілі 2ц нам невідома, то з запасом в безпечну сторону, можна прийняти середнє значення для переважної більшості суден. З урахуванням залежностей (5)-(10) час, коли необхідно виконувати маневр останнього моменту гальмуванням, визначиться формулою: Тпмт Dн Dпмт / V0 R . (12) Час настання маневру останнього моменту відворотом вліво Тпмл Dн Dпмл / V0 R . (13) Час настання маневру останнього моменту відворотом вправо Тпмп Dн Dпмп / V0 R , (14) де V0 - відносна швидкість. 3 UA 89389 U 5 10 15 Приведені залежності (5)-(7) та (12)-(14) дозволяють виробити необхідні рекомендації з виконання маневру останнього моменту, а також автоматизувати процес вибору його виду. Ситуаційний аналізатор матриці відстаней 5 (фіг. 3) дозволяє класифікувати відносне положення небезпечних суден по стороні розташування - справа чи зліва, курсовому куту небезпечних суден q (q 90°) чи відносному курсу Р (Р 90°) і відбирає єдину ситуацію небезпечного розходження для кожного небезпечного судна, і відповідні дані поступають на аналізатор блок 6 черги настання ефективного маневру гальмування, перекладки руля право чи ліво на борт та визначення часу надмірного наближення та часу і виду "маневру останнього моменту", який має 10 ситуацій, структурна схема аналізатора визначення часу надмірного наближення та часу і виду "маневру останнього моменту" судна справа приведена на фіг. 4. Застосування даного пристрою дозволить судноводію оперативно управляти рухом судна, шляхом контролю за небезпечними суднами, та своєчасно визначити вид маневру, для того щоб скоригувати рух, коли виникають аварійні ситуації, і забезпечити уникнення надмірного наближення. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення, що включає систему первинної обробки, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок органів керування, який відрізняється тим, що система первинної обробки містить блок даних про координати суден, що спостерігаються, блок розрахунку відстані від власного судна до всіх суден, зв'язаний з блоком відбору суден, що наближаються, зв'язаний з блоком визначення небезпечних суден по курсовому куту лінії відносного руху, який зв'язаний з ситуаційним аналізатором, який зв'язаний з аналізатором черги настання ефективного маневру гальмування, перекладки руля право чи ліво на борт та блока визначення часу надмірного наближення та часу і виду "маневру останнього моменту", зв'язаний з системою вторинної обробки, розміщений в системі первинної обробки блок вхідних даних про маневрені характеристики власного судна, які використовуються при маневруванні, безпосередньо зв'язаний з системою вторинної обробки та ситуаційним аналізатором, а індикатор додатково містить блок індикації ситуації наближення, блок розрахунку даних для коригування розходження. 4 UA 89389 U 5 UA 89389 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 3/00
Мітки: пристрій, інформаційного, надмірного, небезпечного, судном, процесу, управління, наближення, забезпечення
Код посилання
<a href="https://ua.patents.su/8-89389-pristrijj-dlya-informacijjnogo-zabezpechennya-procesu-upravlinnya-sudnom-pid-chas-nadmirnogo-ta-nebezpechnogo-nablizhennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення</a>
Пристрій для інформаційного забезпечення лоцманської проводки морського судна
Номер патенту: 78679
Опубліковано: 25.03.2013
Автори: Мальцев Анатолій Сідорович, Ворохобін Ігор Ігорович, Голіков Володимир Володимирович, Соколенко Василь Іннокентійович
МПК: G08G 3/00, B63B 49/00
Мітки: морського, забезпечення, судна, проводки, лоцманської, інформаційного, пристрій
Формула / Реферат:
Пристрій для інформаційного забезпечення лоцманської проводки морського судна, що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, зв'язані з блоком перерахунку координат на центр ваги, зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, система...
Система інформаційного забезпечення управління потоками відходів фармацевтичного підприємства

Номер патенту: 67416
Опубліковано: 27.02.2012
Автори: Літвінова Олена В'ячеславівна, Сагайдак-Нікітюк Ріта Василівна, Посилкіна Ольга Вікторівна
МПК: G05B 19/00
Мітки: забезпечення, потоками, відходів, управління, інформаційного, підприємства, система, фармацевтичного
Формула / Реферат:
1. Система інформаційного забезпечення управління потоками відходів фармацевтичного підприємства, що включає підсистему обліку відходів фармацевтичного підприємства та підсистему утилізації відходів фармацевтичного підприємства, при цьому обидві підсистеми містять блоки прийому інформації, послідовно зв'язані з блоками формування відповідних баз даних та блоками виведення інформації, яка відрізняється тим, що до її складу додатково включені...
Спосіб інформаційного забезпечення користувачів
Номер патенту: 88840
Опубліковано: 10.04.2014
Автори: Андрусевич Володимир Анатолійович, Обод Іван Іванович, Стрельницький Олексій Олександрович
МПК: G01S 13/00
Мітки: користувачів, інформаційного, забезпечення, спосіб
Формула / Реферат:
Спосіб інформаційного забезпечення користувачів, який полягає в тому, що на повітряному об'єкті за допомогою системи навігації визначають просторові координати, формують інформаційний пакет, до складу якого входять координати повітряного об'єкта та службова інформація про його стан, котрий за допомогою передавача випромінюють у простір, який приймають наземним пунктом управління, декодують, порівнюють просторові координати повітряного...
Пристрій енергетичного та інформаційного забезпечення
Номер патенту: 17595
Опубліковано: 16.10.2006
Автор: Лєнскій Васілій Васільєвіч
МПК: H03H 11/00, H04B 1/00, G01R 13/00, H03H 3/00
Мітки: пристрій, забезпечення, енергетичного, інформаційного
Формула / Реферат:
1. Пристрій енергетичного і інформаційного забезпечення, який характеризується тим, що в електричних мережах, що мають індуктивність з торсіонно-об'ємною, соленоїдною і/або іншою просторово-енергетичною конфігурацією і/або ємність з розташованими відносно одна одної пластинами, розміщеними в просторовому об'ємі заданої форми, і/або опір, пристрій містить декілька каскадів, виконаних з можливістю формування властивостей, відмінних від...
Спосіб інформаційного забезпечення керування польотами авіації
Номер патенту: 31507
Опубліковано: 10.04.2008
Автори: Охрименко Максим Юрійович, Обод Іван Іванович
МПК: G01S 13/91
Мітки: авіації, керування, спосіб, інформаційного, забезпечення, польотами
Формула / Реферат:
Спосіб інформаційного забезпечення керування польотами авіації, який полягає в тому, що за допомогою розосереджених систем спостереження, включених до єдиної інформаційної мережі, збирають та обробляють інформацію про повітряну обстановку, формують карту локальної повітряної обстановки, і на основі цього формують загальну карту повітряної обстановки, яку видають споживачам, який відрізняється тим, що спочатку формують єдину шкалу часу мережі...
Попередній патент: Застосування глюкозаміну гідрохлориду як засобу, що захищає організм від системного впливу високих температур
Наступний патент: Мукозально-адгезивний фітогель з пробіотиками
Випадковий патент: Шків