Механізм приводу ноги крокуючих машин
Номер патенту: 98978
Опубліковано: 12.05.2015
Автори: Арабаджи Олена Дмитрівна, Амбарцумянц Роберт Вачаганович

Формула / Реферат
Механізм приводу ноги крокуючих машин, що містить корпус, ведучий вал, кривошип, шатун кривошипно-повзуного механізму, повзун, циліндричні пальці, додатковий шатун, який відрізняється тим, що повзун встановлений на n-подібний кронштейн, жорстко закріплений на одном кінці вала, який рухомо встановлений в корпусі, на другом кінці вала жорстко закріплене черв'ячне колесо, яке зачеплене з черв'яком, встановленим рухомо в корпусі і сполученим з керуючим електродвигуном муфтою.
Текст
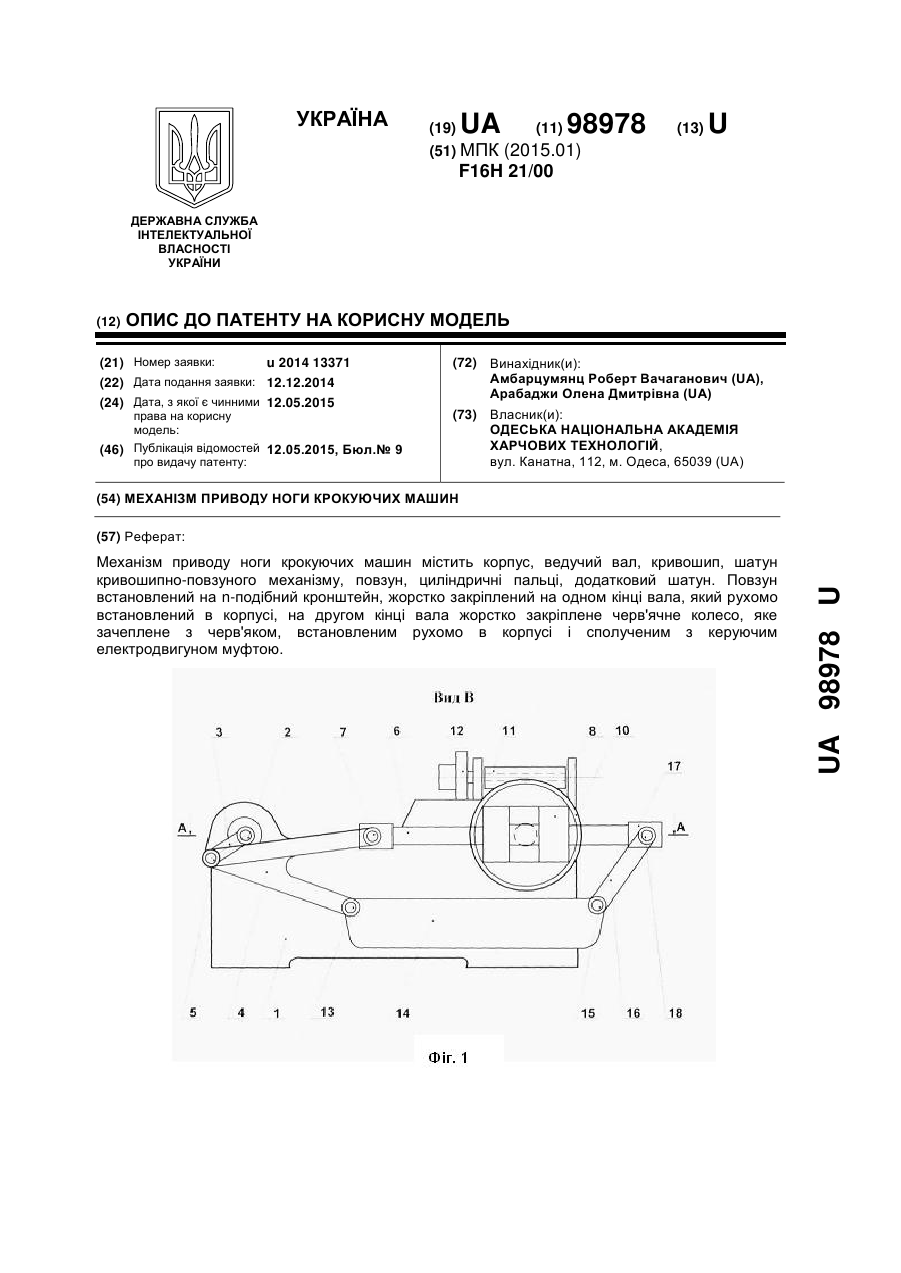
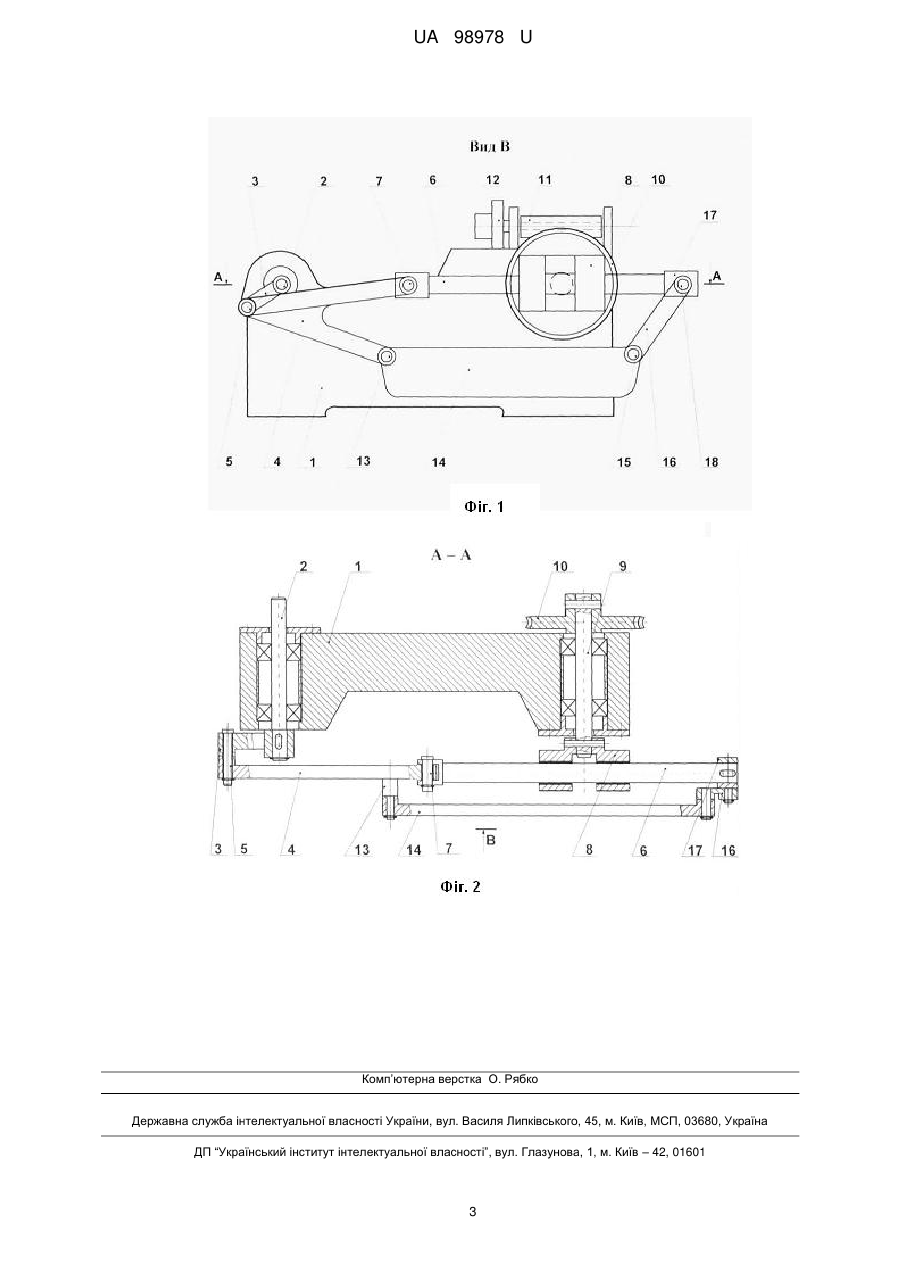
Реферат: UA 98978 U UA 98978 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, а саме до механізмів для поступального переміщення об'єкта по шатунних кривих, які використовуються в крокуючих механізмах, в захватних пристроях роботів і маніпуляторів, в пристосуваннях для металоріжучих верстатів, машин ливарного виробництва, в машинах-автоматах харчової, легкої промисловості та ін. Відомі важільні і зубчасто-важільні механізми, в яких об'єкт, жорстко сполучений з одним із шатунів механізму, відтворює задане поступальне переміщення по складній траєкторії (див., наприклад, Амбарцумянц Р.В… Зубчато-рычажный механизм для воспроизведения плоскопараллельного движения объекта. Сб. Теория механизмов и машин, Харьков. - № 26. 1979.). Проте, в цих механізмах поступальне переміщення об'єкта здійснюється лише на деякій ділянці кута повороту вхідної ланки. В них переміщати об'єкт поступально по шатунній кривій абсолютно точно за повний зворот вхідної ланки неможливо. Відомо конструкція шестиланкового важільного механізму (див. Саркисян Ю.Л. О воспроизведении поступательного движения звена по траекториям исходных четырехзвенником. - вып. 5. - М.: Машиноведение, 1965. - с. 33, рис. 2а), в якому шатун утворює одну поступальну і дві обертальні (шарнірні) пари з іншими ланками механізму, здійснює поступальне переміщення по шатуновій кривій, описуваною точкою М шарнірного чотириланковика (см. там же рис. 1.а, с. 32). Проте як і в першому прикладі, так і в другому траєкторія крокуючої ноги не змінює свого положення, відносно опорної поверхні. Це дуже важко при русі по нерівній поверхні нахил в одну або другу сторону. Найближчим аналогом є шестиланковий важільний механізм (див. Амбарцумянц Р.В., Амбарцумянц К.Р. Шестиланковий шарнірно-важільний механізм поступального переміщення об'єкта. Патент Україні на корисну модель № 32393 Бюл. № 9, 2008 р.), який вибрана за найближчий аналог. У механізмі об'єкт, траєкторія якого відтворюється, одним кінцем шарнірно сполучений з шатуном кривошипно-повзуного механізму, який, у свою чергу, шарнірно сполучений з повзуном, а іншим кінцем об'єкт шарнірно сполучений з додатковим шатуном, утворюючим шарнірне з'єднання з повзуном кривошипно-повзуного механізму. Контур, утворений частиною шатуна кривошипно-повзуного механізму, об'єктом, додатковим шатуном і повзуном кривошипно-повзуного механізму утворюють шарнірний паралелограм. Найближчий аналог і корисна модель мають наступні загальні ознаки: - корпус - ведучий вал - кривошип - шатун кривошипно-повзуного механізму - повзун - циліндричні пальці - додатковий шатун. Головний недолік шестиланкового важільного механізму поступального переміщення об'єкта є неможливість зміни положення траєкторії руху об'єкта, як в статичному стані, так і в динамічному відносно опорної поверхні, що виникає при русі на нерівній поверхні. В основу корисної моделі поставлено задача розробити конструкції механізму, в якому за рахунок зміни елементів конструкції досягають розширення його функціональних можливостей, а саме змінювань положення траєкторії рухомого об'єкта як при русі механізму, так і в його статичному стані відносно опорної поверхні. Поставлена задача вирішується тим, що в конструкції механізму приводу ноги крокуючої машини містить корпус, ведучий вал, кривошип, шатун кривошипно-повзуного механізму, повзун, циліндричні пальці і додатковий шатун, згідно з корисною моделлю, повзун встановлений на n-подібний кронштейн, жорстко закріплений на одном кінці вала, який рухомо встановлений в корпусі, на другом кінці вала жорстко закріплене черв'ячне колесо, яке зачеплене з черв'яком, встановленим рухомо в корпусі і сполученим з керуючим електродвигуном муфтою. Такого виконання конструкції шестиланкового важільного механізму дозволяє розширити його функціональні можливості, а саме змінити положення траєкторії поступального переміщення об'єкта як в русі механізму, так і в його статичному стані відносно опорної поверхні. Конструкція механізму представлена на кресленні де: Фіг. 1. Фронтальний вид. Фіг. 2. Переріз А-А по Фіг. 1. 1 UA 98978 U 5 10 15 20 25 30 35 Механізму приводу ноги крокуючої машини складається з корпусу 1. У корпусі 1 встановлений провідний вал 2. На валу 2 за допомогою шпонки встановлений кривошип 3. Кривошип 3 шарнірно сполучений з шатуном 4 за допомогою пальця 5. Шатун 4 у свою чергу з'єднаний з повзуном 6 за допомогою пальця 7. Повзун 6 встановлений в n-подібний кронштейн 8. Кронштейн 8 жорстко з'єднаний з валом 9, який за допомогою підшипників встановлений в корпус 1. На другом кінці вала 9 нерухомо встановлено черв'ячне колесо 10. Черв'ячне колесо 10 зачеплене з черв'яком 11, який рухомо встановлений в корпус 1 та через муфту з'єднаний з керуючим електродвигуном 12. З шатуном 4 з'єднаний палець 13. Палець 13 шарнірно з'єднаний з додатковим шатуном 14, який є крокуючою ногою. Додатковий шатун 14, в свою чергу, за допомогою пальця 15 шарнірно сполучений з важелем 16. Важіль 16 рухоме з'єднаний з пальцем 18 втулки 17, встановлений за допомогою шпонки на повзун 6. Механізм приводу ноги крокуючої машини працює в двох режимах: режим роботи; режим регулювання. 1. Режим роботи. Обертання від зовнішнього джерела (не показаний на кресл.) передається ведучому валу 2. Від ведучого вала 2 через шпонку обертання передається повзуну 6. Від повзуна 6 через важіль 16 і від шатуна 4 через палець 13 рух передається додатковому шатуну 14. Кронштейн 8, черв'ячне колесо 10, черв'як 11 не мають руху. Центральна вісь пальця 15 рухається по такій же кривій, що і подовжня вісь пальця 13. оскільки прямі лінії, з'єднуючі геометричні центри циліндрових пальців 7, 13, 15, 18 утворюють контур шарнірного паралелограма. Отже всі точки додаткового шатуна 14, який є крокуючою ногою, рухаються по траєкторії, ідентичній траєкторії центрів циліндрових пальців 13 і 15. 2. Режим регулювання. Імпульс регулювання передається до регулюючого електродвигуна 12. Обертання електродвигуна передається до черв'яка 11. Від черв'яка 11 обертання передається до черв'ячною колеса 10 і воно обертається в одну або в іншу сторону залежно від напряму обертання черв'яка 11. Обертання черв'ячного колеса 10 змінює положення вала 9 та з ним положенням n-подібного кронштейна 8, що приводить до зміни положення траєкторії поступального переміщення додаткового шатуна 14 відносно опорної поверхні. Така необхідність виникає тоді, коли нога рухається на нерівній поверхні підйом, ухил або нерівності. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Механізм приводу ноги крокуючих машин, що містить корпус, ведучий вал, кривошип, шатун кривошипно-повзуного механізму, повзун, циліндричні пальці, додатковий шатун, який відрізняється тим, що повзун встановлений на n-подібний кронштейн, жорстко закріплений на одном кінці вала, який рухомо встановлений в корпусі, на другом кінці вала жорстко закріплене черв'ячне колесо, яке зачеплене з черв'яком, встановленим рухомо в корпусі і сполученим з керуючим електродвигуном муфтою. 2 UA 98978 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюAmbartsumiants Robert Vachahanovych
Автори російськоюАмбарцумянц Роберт Вачаганович
МПК / Мітки
МПК: F16H 21/00
Мітки: механізм, приводу, крокуючих, машин, ноги
Код посилання
<a href="https://ua.patents.su/5-98978-mekhanizm-privodu-nogi-krokuyuchikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Механізм приводу ноги крокуючих машин</a>
Механізм приводу ножів триножових різальних машин
Номер патенту: 63711
Опубліковано: 15.01.2004
Автори: Хведчин Юрій Йосипович, Пасіка Вячеслав Романович, Полюдов Олександр Миколайович
МПК: F16H 21/00, B26D 1/00
Мітки: різальних, ножів, триножових, механізм, машин, приводу
Формула / Реферат:
Механізм приводу ножів триножової різальної машини, що включає кривошип, шатун і повзун, що з’єднані між собою, який відрізняється тим, що додатково містить нерухомий кулачок, а кривошип виконаний у вигляді привідного повзуна з кулісою, на одному кінці якої розміщений ролик, при цьому куліса з’єднана з нерухомим кулачком через ролик, що обкочує його, а другий кінець куліси приєднаний до шатуна.
Механізм приводу ножів триножової різальної машини
Номер патенту: 63711
Опубліковано: 17.04.2006
Автори: Полюдов Олександр Миколайович, Хведчин Юрій Йосипович, Пасіка Вячеслав Романович
МПК: F16H 21/00, B26D 1/00
Мітки: приводу, триножової, машини, механізм, різальної, ножів
Формула / Реферат:
Механізм приводу ножів триножової різальної машини, що включає кривошип, шатун і повзун, що з’єднані між собою, який відрізняється тим, що додатково містить нерухомий кулачок, а кривошип виконаний у вигляді привідного повзуна з кулісою, на одному кінці якої розміщений ролик, при цьому куліса з’єднана з нерухомим кулачком через ролик, що обкочує його, а другий кінець куліси приєднаний до шатуна.
Механізм приводу робочих органів сільськогосподарських машин
Номер патенту: 77806
Опубліковано: 15.01.2007
Автори: Павлик Володимир Іванович, Пейчев Савва Васильович, Яблуновський Василь Сергійович, Кумпан Віктор Карпович
МПК: A01B 71/00, A01D 34/00
Мітки: робочих, органів, механізм, машин, сільськогосподарських, приводу
Формула / Реферат:
Механізм приводу робочих органів сільськогосподарських машин, який містить ексцентрик та вал, з’єднані між собою хомутом, які мають в місцях з’єднання лиски, хомут стягує вал і ексцентрик, а внутрішня поверхня хомута у поперечному перерізі виконана у вигляді паза, який відрізняється тим, що радіуси вала, ексцентрика та поверхонь, якими закінчується паз, рівні між собою та є рівними по значенню половині розміру ширини паза, а розміри
Шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта
Номер патенту: 32393
Опубліковано: 12.05.2008
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/00
Мітки: переміщення, шестиланковий, шарнірно-важільний, поступального, механізм, об'єкта
Формула / Реферат:
Шестиланковий шарнірно-важільний механізм поступального переміщення об'єкта, що містить кривошип, шатуни, повзуни, об'єкт, що утворює шарнірні з'єднання з шатунами і поступальною парою з повзуном, який відрізняється тим, що об'єкт одним кінцем шарнірно з'єднаний з шатуном кривошипно-повзунного механізму, а іншим кінцем шарнірно з'єднаний з іншим шатуном, що утворює шарнірне з'єднання з повзуном, а лінії, що з'єднують центри шарнірів об'єкта...
Регульований шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта
Номер патенту: 87316
Опубліковано: 10.02.2014
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович, Арабаджи Олена Дмитрівна
МПК: F16H 21/00
Мітки: поступального, регульованій, механізм, шарнірно-важільний, об'єкта, шестиланковий, переміщення
Формула / Реферат:
Шестиланковий важільний механізм поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, шатун кривошипно-повзунного механізму, повзун, додатковий шатун, циліндричні пальці, який відрізняється тим, що на циліндричному пальці шарнірного з'єднання шатуна кривошипно-повзунного механізму і повзуна рухливо і співісно з пальцем встановлено черв'ячне колесо, зачеплене з черв'яком, рухливо встановленим на підставі, жорстко...
Попередній патент: Спосіб автоматичного керування процесом розмелу м’ясної сировини у кутері
Наступний патент: Спосіб підготовки товстої кишки до відеоколоноскопії
Випадковий патент: Спосіб введення лікарських препаратів у дегенеративно змінені міжхребцеві диски