Шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта
Номер патенту: 32393
Опубліковано: 12.05.2008
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
Формула / Реферат
Шестиланковий шарнірно-важільний механізм поступального переміщення об'єкта, що містить кривошип, шатуни, повзуни, об'єкт, що утворює шарнірні з'єднання з шатунами і поступальною парою з повзуном, який відрізняється тим, що об'єкт одним кінцем шарнірно з'єднаний з шатуном кривошипно-повзунного механізму, а іншим кінцем шарнірно з'єднаний з іншим шатуном, що утворює шарнірне з'єднання з повзуном, а лінії, що з'єднують центри шарнірів об'єкта із шатунами, а шатуни з повзуном, утворюють паралелограм.
Текст
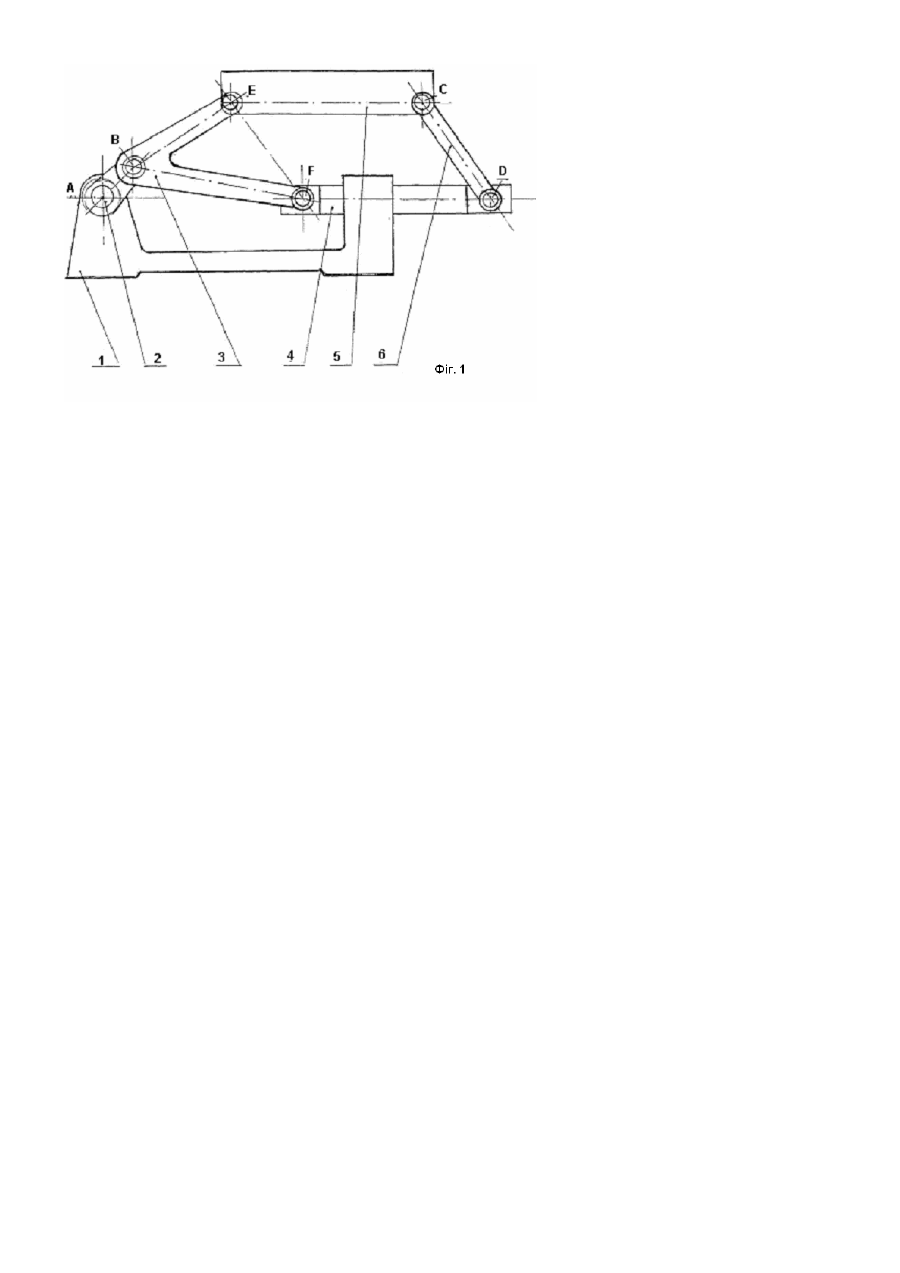
Корисна модель відноситься до області машинобудування, а саме до механізмів для поступального переміщення об'єкта по шатунних кривих і які застосовуються в крокуючих машинах, в кліщах роботів і маніпуляторів, в пристосуваннях для металорізальних верстатів, машин ливарного виробництва, в машинахавтоматах харчової, легкої промисловостей та ін. Відомі важільні і зубчасто-важільні механізми в яких об'єкт, жорстко з'єднаний з одним із шатунів механізму, відтворює задане поступальне переміщення по складній траєкторії [див., наприклад, Р. В. Амбарцумянц. Зубчатоважільний механизм для воспроизведения плоско-параллельного движения об'єкта. Сб. Теория механизмов и машин, Харьков, №26, 1979.]. Однак, у цих механізмах поступальне переміщення об'єкта здійснюється лише на деякій ділянці кута повороту вхідної ланки, причому приблизно, і найчастіше з великою похибкою, особливо при великих інтервалах кута повороту вхідної ланки. У них переміщати об'єкт поступально по шатунній кривій абсолютно точно не можливо. Найбільш близьке рішення є шестиланковий важільний механізм [див. Ю. Л. Саркисян. О воспроизведении поступательного движения звена по траекториям исходных четирехзвенников. Машиноведение, М., вип.5, 1965,с.33, рис.2а], у якому шатун, що утворює одну поступальну і дві обертальні (шарнірні) пари з іншими ланками механізму, робить поступальне переміщення по шатунній кривій, описуючій точкою М шарнірного четирехланкового механізму [див там же рис. 1,а, с.32]. Механізм працює такий чином. Рух від зовнішнього джерела руху передається вхідному кривошипу МС’В’. Від вхідного кривошипа через шатуни C’D’ і В’А’ рух передається до шатуна D’A’. Завдяки наявності двох поступальних пар щатун D’A’ робить поступальне переміщення по шатунній кривій. Недоліками цього механізму є: 1 .Наявність двох паступальних кінематичних пар, що приводять до ускладнення технології виготовлення і, отже, підвищенню собівартості виробу. 2. Порівняно великі втрати на подолання сил тертя у поступальних кінематичних парах і особливо в поступальній парі з основою механізму через велику консоль. 3. Складність самої конструкції механізму, що не дозволяє для їхніх досліджень використовувати прості інженерні методи, що і обмежує області його застосування. Задачею корисної моделі є створення конструкції шестиланкового важільного механізму на базі добре відомого і розповсюдженого в різних областях народного господарства кривошипно-повзуного механізму. Для рішення поставленої задачі об'єкт одним кінцем шарнірно з'єднується із шатуном, що своїм іншим кінцем шарнірно з'єднується з повзуном кривошипно-повзуного механізму. Іншим своїм кінцем об'єкт з'єднаний із шатуном кривошипно-повзуного механізму, який водночас утворює шарнірне з'єднання з кривошипом і повзуном. Центр шарнірного з'єднання об'єкта із шатуном кривошипноповзуного механізму вибирається таким чином, щоб контур, утворений центрами шарнірних з'єднань об'єкта із шатунами і повзуном, був паралелограмом. Таке виконання шестиланкового важільного механізму дозволяє об'єкта 1. Переміщатися поступально по шатунній кривій, описуваної центром шарнірного з'єднання об'єкта із шатуном кривошипно-повзунного механізму. 2. 3меньшити кількість поступальних кінематичних пар, що приводить до спрощення технології виготовлення окремих деталей і зменшення собівартості виробу. 3. Зменшити втрати на тертя і, отже, енерговитрати на подолання сил тертя в результаті зменшення кількості поступальних кінематичних пар. 4. Використовувати загальновідомі і прості інженерні методи дослідження запропонованої конструкції механізму, що суттєво зменшить витрати на проектування даного механізму і його дослідження. Конструкція механізму представлена на Фіг. Механізм складається з корпусу 1. У корпусі 1 установлений ведучий вал з жорстко закріпленим на ньому кривошипом 2. Кривошип 2 шарніром В з'єднаний із шатуном 3 кривошипно-повзуного механізму. Шатун 3 шарніром F з'єднаний з повзуном 4. Об'єкт 5 одним кінцем шарніром С з'єднаний з іншим шатуном 6, що іншим своїм кінцем шарніром D з'єднаний з повзуном 4. Об'єкт 5 іншим своїм кінцем шарніром Е з'єднаний із шатуном 3. Відстань між центрами шарнірів Е і С строго дорівнює відстані між центрами шарнірів F і D. Відстань між центрами шарнірів С і D (довжина шатуна 6) строго дорівнює відстані між центрами шарнірів Е і F. Контур FECD, утворений лініями, що з'єднують центри шарнірів F, Е, В, D) є паралелограмом. Механізм працює такий чином. Рух від зовнішнього джерела (на Фіг.1 не показаний) віддається через ведучий вал кривошипу 2. Від кривошипу 2 рух через шатун 3 передається до повзуна 4 і об'єкту 5. Шатун 6 одержує рух від повзуна 4 і передає рух до об'єкта 5. Рухи шатунів 3 і 6 абсолютно ідентичні, оскільки контур FECD является паралелограмом. У такому випадку траєкторія центру шарніра С абсолютно ідентична траєкторії центру шарніра Е. Отже, об'єкт 3 робить поступальне переміщення по траєкторії шатунної точки Е. Область застосування - крокуючі машини, кліщові пристрої роботів і маніпуляторів, пристосування для металорізальних верстатів, ливарних машин, машин-автоматів харчової, легкої промисловостей та ін.
ДивитисяДодаткова інформація
Назва патенту англійськоюSix-link articulation linkage for object translational motion
Автори англійськоюAmbartsumiants Robert Vachahanovych, Ambartsumiants Karen Robertovych
Назва патенту російськоюШестизвенный шарнирно-рычажный механизм поступательного перемещения объекта
Автори російськоюАмбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК / Мітки
МПК: F16H 21/00
Мітки: переміщення, об'єкта, механізм, поступального, шестиланковий, шарнірно-важільний
Код посилання
<a href="https://ua.patents.su/2-32393-shestilankovijj-sharnirno-vazhilnijj-mekhanizm-postupalnogo-peremishhennya-obehkta.html" target="_blank" rel="follow" title="База патентів України">Шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта</a>
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки
Номер патенту: 53876
Опубліковано: 17.02.2003
Автори: Свєтловський Олександр Борисович, Харжевський В'ячеслав Олександрович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: вихідної, механізм, тривалістю, регульованою, ланки, зупинки, шарнірно-важільний
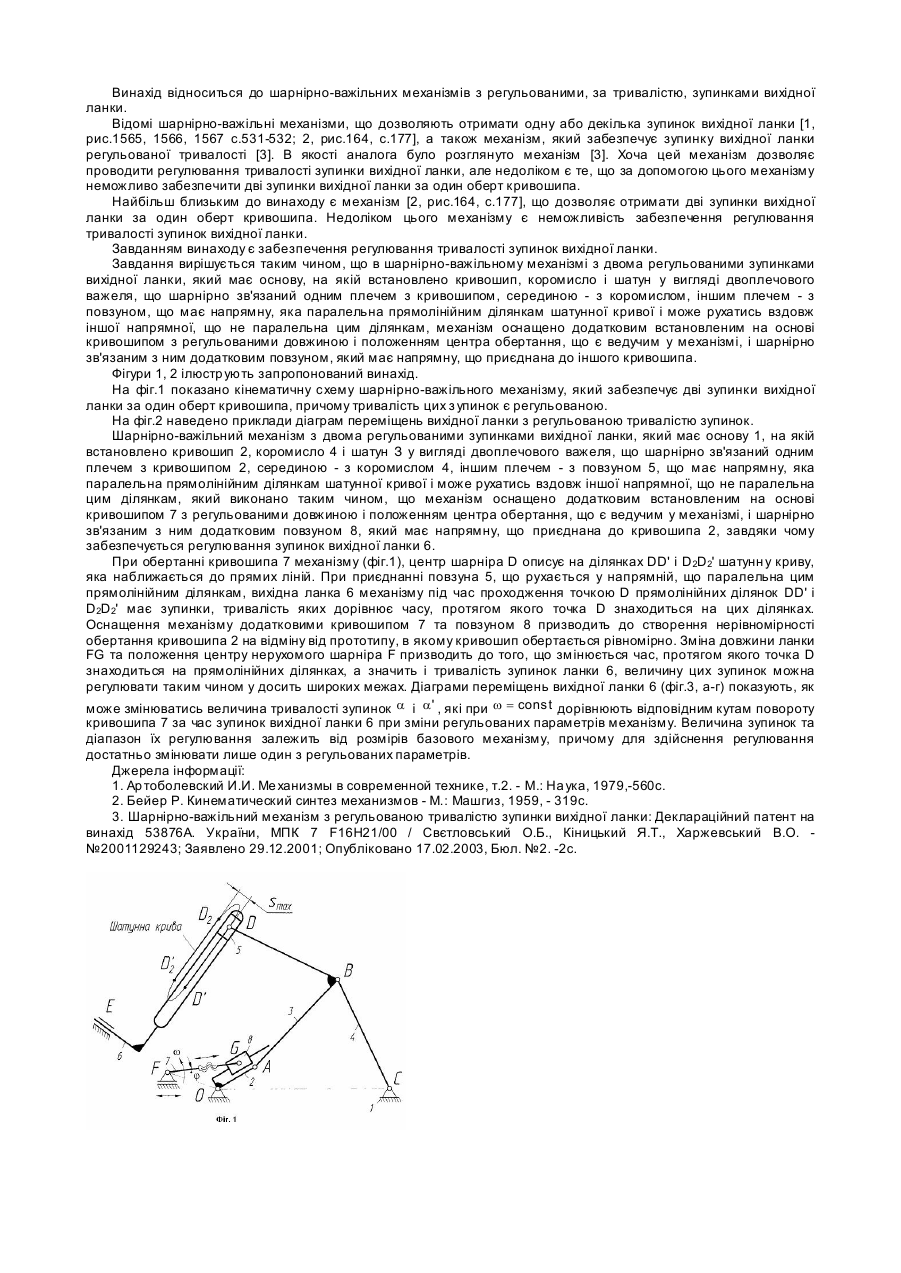
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з шатуном, який шарнірно зв'язаний з повзуном, який відрізняється тим, що відстань між осями шарнірів і довжина кривошипа регульовані.
Регульований механізм поступального переміщення
Номер патенту: 32190
Опубліковано: 12.05.2008
Автори: Амбарцумянц Рубен Робертович, Амбарцумянц Роберт Вачаганович, Олісеєнко Юрій Володимирович
МПК: F16H 29/00
Мітки: механізм, переміщення, регульованій, поступального
Формула / Реферат:
Регульований механізм поступального руху, що містить нерухоме центральне колесо, сателіт, вал з водилом, шток та повзун, який відрізняється тим, що центральне колесо виконане у вигляді черв'ячного колеса, яке встановлене у корпусі механізму з можливістю руху, також конструкція додатково містить зчеплений з черв'ячним колесом самогальмуючий черв'як, який одним кінцем встановлений з можливістю руху в корпусі, а іншим кінцем у кронштейні,...
Шарнірно-важільний механізм з двома регульованими зупинками вихідної ланки
Номер патенту: 66042
Опубліковано: 15.04.2004
Автори: Харжевський В'ячеслав Олександрович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: двома, регульованими, механізм, шарнірно-важільний, вихідної, зупинками, ланки
Формула / Реферат:
Шарнірно-важільний механізм з двома регульованими зупинками вихідної ланки, який має основу, на якій встановлений кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з повзуном, що має напрямну, яка паралельна прямолінійним ділянкам шатунної кривої і може рухатись вздовж іншої напрямної, що не паралельна цим ділянкам, який відрізняється тим, що...
Шарнірно-важільний механізм з зупинками

Номер патенту: 44535
Опубліковано: 15.02.2002
Автори: Кіницький Ярослав Тимофійович, Свєтловський Олександр Борисович
МПК: F16H 21/00
Мітки: зупинками, механізм, шарнірно-важільний
Формула / Реферат:
Шарнірно-важільний механізм з зупинками, який має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, який шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом який відрізняється тим, що іншим плечем він зв'язаний з двома або більше: трьома, чотирма, п'ятьма, шістьма шатунами, які відповідно шарнірно зв'язані з повзунами, завдяки чому забезпечується зупинка двох або більше вихідних ланок.
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідних ланок
Номер патенту: 51985
Опубліковано: 16.12.2002
Автори: Свєтловський Олександр Борисович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: шарнірно-важільний, вихідних, тривалістю, зупинки, регульованою, механізм, ланок
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідних ланок містить основу, на якій встановлені кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, а іншим плечем за допомогою одного або декількох шатунів - з повзунами, який відрізняється тим, що довжина шатунів регульована.
Попередній патент: Спосіб збирання балочної рамно-нерозрізної системи
Наступний патент: Лабораторія пересувна для діагностики геологічного середовища на малих глибинах
Випадковий патент: Установка для виробництва метеликів зернової молі