Система керування полярним краном

Формула / Реферат
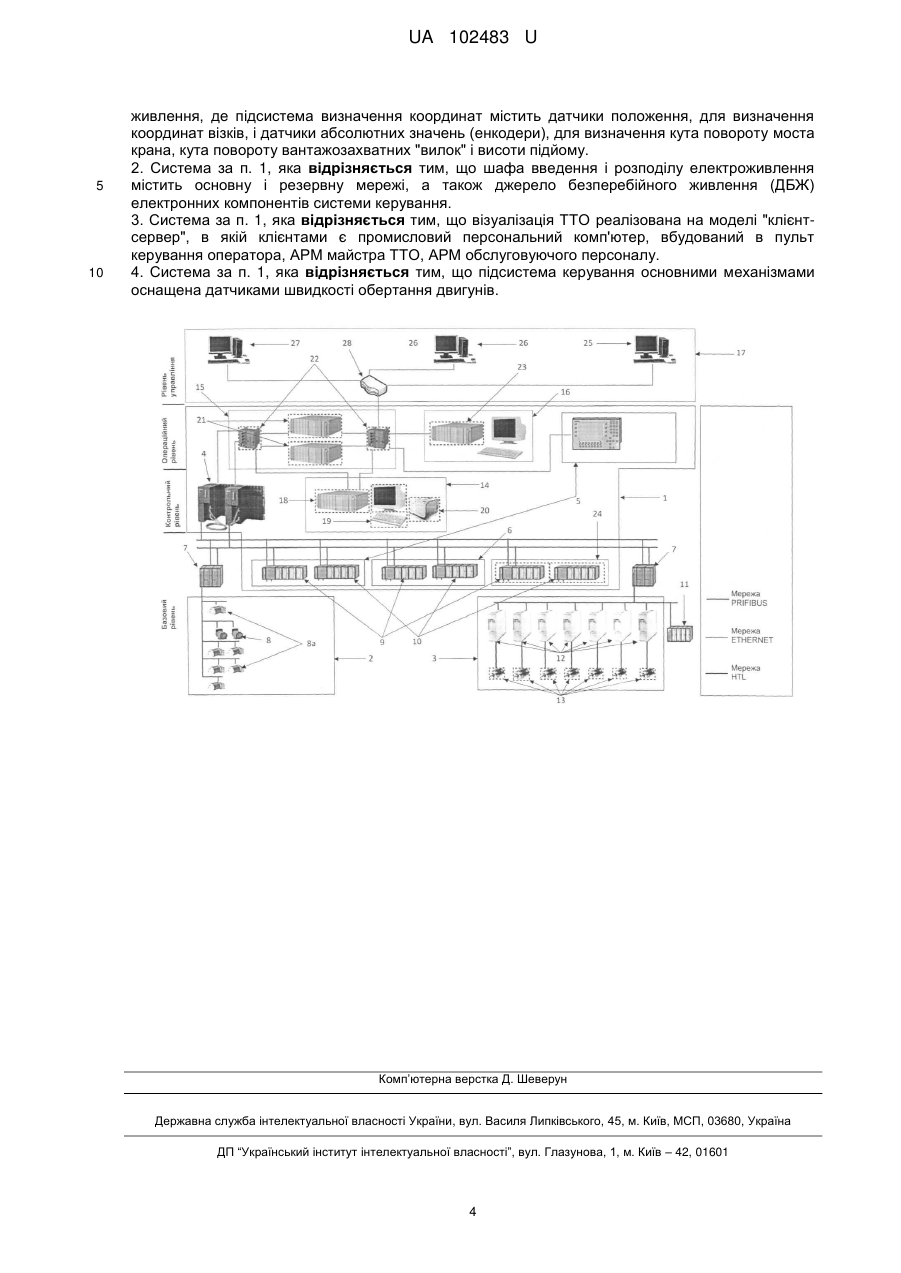
1. Система керування полярним краном, що містить керуючу підсистему, підсистему визначення координат основних механізмів крана, підсистему керування основними механізмами, пульт керування оператора і шафу керування допоміжними механізмами, яка відрізняється тим, що керуюча підсистема складається з шафи введення і розподілу електроживлення та шафи резервованого керуючого контролера і система додатково містить шафу резервованої підсистеми візуалізації транспортних технологічних операцій (ТТО), автоматизоване робоче місце (АРМ) майстра ТТО, АРМ обслуговуючого персоналу і підсистему введення і розподілу живлення, де підсистема визначення координат містить датчики положення, для визначення координат візків, і датчики абсолютних значень (енкодери), для визначення кута повороту моста крана, кута повороту вантажозахватних "вилок" і висоти підйому.
2. Система за п. 1, яка відрізняється тим, що шафа введення і розподілу електроживлення містить основну і резервну мережі, а також джерело безперебійного живлення (ДБЖ) електронних компонентів системи керування.
3. Система за п. 1, яка відрізняється тим, що візуалізація ТТО реалізована на моделі "клієнт-сервер", в якій клієнтами є промисловий персональний комп'ютер, вбудований в пульт керування оператора, АРМ майстра ТТО, АРМ обслуговуючого персоналу.
4. Система за п. 1, яка відрізняється тим, що підсистема керування основними механізмами оснащена датчиками швидкості обертання двигунів.
Текст
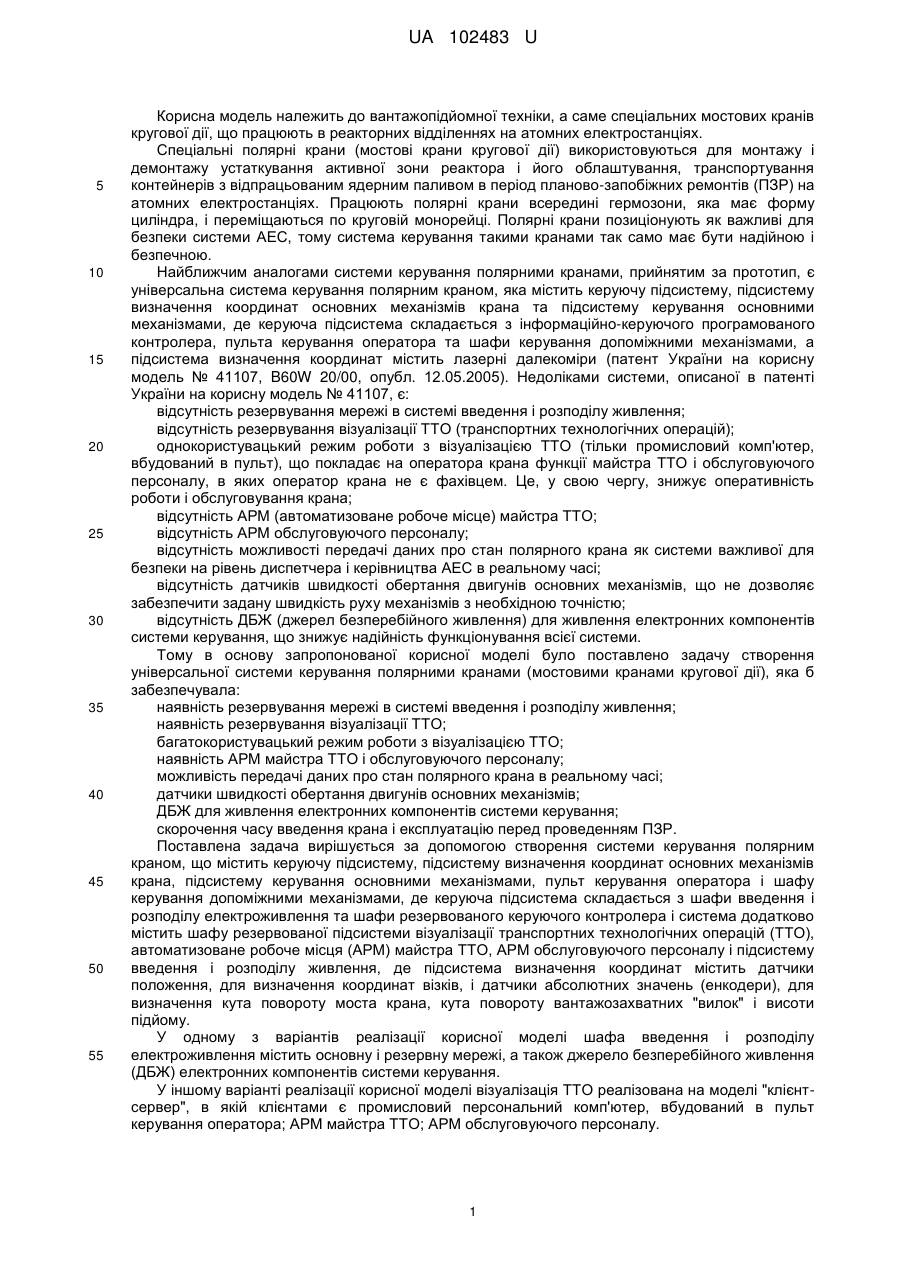
Реферат: UA 102483 U UA 102483 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до вантажопідйомної техніки, а саме спеціальних мостових кранів кругової дії, що працюють в реакторних відділеннях на атомних електростанціях. Спеціальні полярні крани (мостові крани кругової дії) використовуються для монтажу і демонтажу устаткування активної зони реактора і його облаштування, транспортування контейнерів з відпрацьованим ядерним паливом в період планово-запобіжних ремонтів (ПЗР) на атомних електростанціях. Працюють полярні крани всередині гермозони, яка має форму циліндра, і переміщаються по круговій монорейці. Полярні крани позиціонують як важливі для безпеки системи АЕС, тому система керування такими кранами так само має бути надійною і безпечною. Найближчим аналогами системи керування полярними кранами, прийнятим за прототип, є універсальна система керування полярним краном, яка містить керуючу підсистему, підсистему визначення координат основних механізмів крана та підсистему керування основними механізмами, де керуюча підсистема складається з інформаційно-керуючого програмованого контролера, пульта керування оператора та шафи керування допоміжними механізмами, а підсистема визначення координат містить лазерні далекоміри (патент України на корисну модель № 41107, B60W 20/00, опубл. 12.05.2005). Недоліками системи, описаної в патенті України на корисну модель № 41107, є: відсутність резервування мережі в системі введення і розподілу живлення; відсутність резервування візуалізації ТТО (транспортних технологічних операцій); однокористувацький режим роботи з візуалізацією ТТО (тільки промисловий комп'ютер, вбудований в пульт), що покладає на оператора крана функції майстра ТТО і обслуговуючого персоналу, в яких оператор крана не є фахівцем. Це, у свою чергу, знижує оперативність роботи і обслуговування крана; відсутність АРМ (автоматизоване робоче місце) майстра ТТО; відсутність АРМ обслуговуючого персоналу; відсутність можливості передачі даних про стан полярного крана як системи важливої для безпеки на рівень диспетчера і керівництва АЕС в реальному часі; відсутність датчиків швидкості обертання двигунів основних механізмів, що не дозволяє забезпечити задану швидкість руху механізмів з необхідною точністю; відсутність ДБЖ (джерел безперебійного живлення) для живлення електронних компонентів системи керування, що знижує надійність функціонування всієї системи. Тому в основу запропонованої корисної моделі було поставлено задачу створення універсальної системи керування полярними кранами (мостовими кранами кругової дії), яка б забезпечувала: наявність резервування мережі в системі введення і розподілу живлення; наявність резервування візуалізації ТТО; багатокористувацький режим роботи з візуалізацією ТТО; наявність АРМ майстра ТТО і обслуговуючого персоналу; можливість передачі даних про стан полярного крана в реальному часі; датчики швидкості обертання двигунів основних механізмів; ДБЖ для живлення електронних компонентів системи керування; скорочення часу введення крана і експлуатацію перед проведенням ПЗР. Поставлена задача вирішується за допомогою створення системи керування полярним краном, що містить керуючу підсистему, підсистему визначення координат основних механізмів крана, підсистему керування основними механізмами, пульт керування оператора і шафу керування допоміжними механізмами, де керуюча підсистема складається з шафи введення і розподілу електроживлення та шафи резервованого керуючого контролера і система додатково містить шафу резервованої підсистеми візуалізації транспортних технологічних операцій (ТТО), автоматизоване робоче місця (АРМ) майстра ТТО, АРМ обслуговуючого персоналу і підсистему введення і розподілу живлення, де підсистема визначення координат містить датчики положення, для визначення координат візків, і датчики абсолютних значень (енкодери), для визначення кута повороту моста крана, кута повороту вантажозахватних "вилок" і висоти підйому. У одному з варіантів реалізації корисної моделі шафа введення і розподілу електроживлення містить основну і резервну мережі, а також джерело безперебійного живлення (ДБЖ) електронних компонентів системи керування. У іншому варіанті реалізації корисної моделі візуалізація ТТО реалізована на моделі "клієнтсервер", в якій клієнтами є промисловий персональний комп'ютер, вбудований в пульт керування оператора; АРМ майстра ТТО; АРМ обслуговуючого персоналу. 1 UA 102483 U 5 10 15 20 25 30 35 40 45 50 55 60 У ще одному з варіантів реалізації корисної моделі підсистема керування основними механізмами оснащена датчиками швидкості обертання двигунів. Запропонована корисна модель детально розкривається з посиланням на креслення, на якому показана блок-схема запропонованої системи керування полярним краном, де: 1 - керуюча підсистема; 2 - підсистема визначення координат; 3 - підсистема керування основними механізмами; 4 - інформаційно-управляючий програмований контролер; 5 - пульт керування оператора; 6 - шафа керування допоміжними механізмами; 7 - пристрій переходу; 8 - датчики визначення просторового положення основних механізмів крана; 8а - датчики визначення кута повороту моста, вантажозахватних вилок і висоти підйому; 9 - основна мережа керування допоміжними механізмами; 10 - резервна мережа керування допоміжними механізмами; 11 - пристрій для вимірювання ваги; 12 - елементи керування основними механізмами крана; 13 - датчики швидкості двигунів основних механізмів крана; 14 - АРМ обслуговуючого персоналу; 15 - підсистема візуалізації ТТО; 16 - АРМ майстра ТТО; 17 - підсистема рівня керування АЕС; 18 - промисловий персональний комп'ютер АРМ обслуговуючого персоналу; 19 - консоль керування АРМ обслуговуючого персоналу; 20 - кольоровий лазерний принтер для друку звітів про роботу і параметри крана; 21 - промислові персональні комп'ютери (сервера) підсистеми візуалізації ТТО; 22 - мережеві концентратори підсистеми візуалізації ТТО; 23 - промисловий персональний комп'ютер АРМ майстра ТТО; 24 - підсистема введення і розподілу живлення з ДБЖ для живлення електронних компонентів системи керування; 25 - персональний комп'ютер чергового персоналу поза гермозоною; 26 - персональний комп'ютер диспетчера АЕС; 27 - персональний комп'ютер старшого майстра цеху, обслуговуючого полярні крани, 28 – комунікаційний пристрій. Створена система керування полярним краном (креслення), містить керуючу підсистему 1, підсистему 2 визначення координат, підсистему 3 керування основними механізмами, підсистему 24 введення і розподілу живлення з ДБЖ електронних компонентів системи керування, резервованої клієнт-серверної підсистеми візуалізації ТТО 15. При цьому керуюча підсистема 1 складається з інформаційного керованого програмованого контролера (комп'ютерного промислового розрахунково-керуючого пристрою кранової системи) 4, пульта 5 керування оператора, шафи 6 управлінь допоміжними механізмами, резервованих серверів візуалізації ТТО 21, мережевих концентраторів 22, АРМ майстра ТТО 16 з промисловим комп'ютером 23, АРМ обслуговуючого персоналу 14 з промисловим комп'ютером 18, консоллю 19 і кольоровим принтером 20. Пульт 5 керування оператора, шафа 6 керування допоміжними механізмами, шафа підсистеми введення і розподілу живлення 24 містять основну 9 і резервну 10 мережі керування; а підсистема 2 для визначення координат кранових теліжок містить датчики положення 8, а для визначення кута повороту моста крана, кута повороту вантажозахватних "вилок" і висоти підйомів-датчиків абсолютних значень (енкодери) 8а, що зв'язані з мережею керування через пристрій переходу 7. Завдяки використанню клієнт-серверної моделі побудови системи керування забезпечується можливість оперативного контролю в реальному часі за ядерно-небезпечними операціями і технічним станом крана як системи важливою для безпеки АЕС диспетчерською службою та керівництвом цеху, що реалізовано у вигляді персональних комп'ютерів 25, 26 та 27, що зв’язані у мережу через комунікаційний пристрій 28, наприклад роутер. Наявність резервування в системі візуалізації підвищує загальну надійність системи керування та зменшує до нуля час простою обладнання в разі виходу з ладу комп'ютера, вбудованого в пульт оператора крана або одного з серверів візуалізації. Застосування багатокористувацької клієнт-серверної моделі системи візуалізації дозволяє розділити функції оператора крана (комп'ютер вбудований в пульт керування), технологічного персоналу (автоматизоване робоче місце технологічного персоналу) та обслуговуючого 2 UA 102483 U 5 10 15 20 25 30 35 40 45 50 персоналу (автоматизоване робоче місце обслуговуючого персоналу), а також дозволяє організувати передачу даних про технічний стан і процеси проведення ядерно-небезпечних операцій на рівень керування АЕС 17. Реалізована основна і резервна мережі керування в системі вводу та розподілу живлення. Отже, є можливості проводити діагностику стану обладнання введення і розподілу живлення і зменшується час пошуку несправності і, як наслідок, зменшується час простою обладнання. Також передбачений зворотний зв'язок щодо швидкості для двигунів основних механізмів за рахунок установки цифрових датчиків обертів (енкодерів). Це дозволяє підтримати задану швидкість механізмів з необхідною точністю. Тому виключений з'їзд моста на "хорду" і "ривки" вантажу при підйомі і опусканні. Програмований інформаційно-управляючий контролер 4 (наприклад, марки SIMATIC S7-400) використовують для керування системою і контролем за її роботою. Комунікація компонентів системи здійснюється основною мережею 9 або резервною мережею 10 (наприклад, марки PROFIBUS), за допомогою відповідних комунікаційних модулів і мережевих програмних засобів, що значно зменшує кількість кабельних зв'язків між компонентами системи керування. Використання в системі програмованого контролера з резервованою структурою забезпечує високу надійність функціонування системи керування; резервування всіх основних функцій системи; можливість використання стандартної і резервованої мережі системи; швидке ("гаряче") резервування - автоматичне перемикання на резервний блок у разі відмови основного блока. Пульт керування оператора 5 оснащений промисловим комп'ютером (наприклад РС677), призначеним для керування циклом ТТО, візуалізації, контролю ТТО. Реєстрація і архівація інформації здійснюється в резервованих серверах візуалізації. АΡΜ майстра ТТО 16 використовується для параметрування циклів ТТО (введення і зміна координат заборонених зон обслуговування, введення і зміна параметрів вантажів, введення і зміна допустимих швидкостей переміщення механізмів крана і так далі). В процесі роботи система виконує постійний контроль технічного стану з відображенням інформації на моніторі АРМ обслуговуючого персоналу 18. У випадки виникнення сигналу про несправність робота всіх механізмів блокується з видачею відповідного повідомлення обслуговуючому персоналу. За допомогою пристроїв переходу 7 забезпечується перехід на резервне керування основними механізмами крана. Використання датчиків швидкості двигунів 13 спільно з елементами керування основних механізмів крана 12 дозволяє дуже точно підтримувати задану швидкість переміщення механізмів. У запропонованій системі керування забезпечено повне резервування функцій алгоритму центрального процесора, функцій візуалізації ТТО, пульта керування оператора 5, шафи керування допоміжними механізмами, шафи введення і розподілу електроживлення. При виході з ладу будь-якого з компонентів в управляючій підсистемі відбувається автоматичний перехід на резервний компонент. При управлінні рухом будь-якого агрегату крана (міст, візок, підвіска) забезпечується постійне автоматичне відстежування їх положення і відображення його на моніторі пульта керування. Для попередження перевантаження під час підйому передбачено пристрій 11 (наприклад типу SIWAREX) для вимірювання ваги, що блокує виконання небезпечних маніпуляцій і попереджає про це персонал. Пульт керування оператора так само забезпечує можливість регулювання швидкості підйому вантажів. Просторові координати положення основних механізмів крана і підвіски крана визначають за допомогою встановлених в системі крана датчиків положення. Технічним результатом корисної моделі було створення системи керування полярним краном, яка забезпечує надійнішу і безпечнішу роботу системи, високу точність позиціонування крана, оперативність керування краном; швидкий перехід на резервні мережі і елементи системи; протоколювання в реальному часі дій операторів, маршрутів пересування і навантажень крана; спрощення і прискорення обслуговування і ремонту крана. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 1. Система керування полярним краном, що містить керуючу підсистему, підсистему визначення координат основних механізмів крана, підсистему керування основними механізмами, пульт керування оператора і шафу керування допоміжними механізмами, яка відрізняється тим, що керуюча підсистема складається з шафи введення і розподілу електроживлення та шафи резервованого керуючого контролера і система додатково містить шафу резервованої підсистеми візуалізації транспортних технологічних операцій (ТТО), автоматизоване робоче місце (АРМ) майстра ТТО, АРМ обслуговуючого персоналу і підсистему введення і розподілу 3 UA 102483 U 5 10 живлення, де підсистема визначення координат містить датчики положення, для визначення координат візків, і датчики абсолютних значень (енкодери), для визначення кута повороту моста крана, кута повороту вантажозахватних "вилок" івисоти підйому. 2. Система за п. 1, яка відрізняється тим, що шафа введення і розподілу електроживлення містить основну і резервну мережі, а також джерело безперебійного живлення (ДБЖ) електронних компонентів системи керування. 3. Система за п. 1, яка відрізняється тим, що візуалізація ТТО реалізована на моделі "клієнтсервер", в якій клієнтами є промисловий персональний комп'ютер, вбудований в пульт керування оператора, АРМ майстра ТТО, АРМ обслуговуючого персоналу. 4. Система за п. 1, яка відрізняється тим, що підсистема керування основними механізмами оснащена датчиками швидкості обертання двигунів. Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of polar crane
Автори англійськоюLondon Boris
Назва патенту російськоюСистема управления полярным краном
Автори російськоюЛондон Борис
МПК / Мітки
МПК: B60W 20/00
Мітки: краном, система, полярним, керування
Код посилання
<a href="https://ua.patents.su/6-102483-sistema-keruvannya-polyarnim-kranom.html" target="_blank" rel="follow" title="База патентів України">Система керування полярним краном</a>
Універсальна система керування полярним краном
Номер патенту: 41107
Опубліковано: 12.05.2009
Автор: Крюгер Георг Вернер
МПК: B60W 20/00, B66C 17/00
Мітки: керування, система, краном, універсальна, полярним
Формула / Реферат:
1. Універсальна система керування полярним краном, яка містить керуючу підсистему, підсистему визначення координат основних механізмів крана та підсистему керування основними механізмами, яка відрізняється тим, що керуюча підсистема складається з інформаційно-керуючого програмованого контролера, пульта керування оператора та шафи керування допоміжними механізмами, а підсистема визначення координат містить лазерні далекоміри.2....
Пристрій для керування кульовим краном
Номер патенту: 7417
Опубліковано: 15.06.2005
Автори: Бурняшев Аркадій Васильович, Беккер Михаил Вікторович, Моісеєв Сергій Вікторович, Лапицький Яків Юрійович, Дрогомирецький Михайло Миколайович
МПК: F16K 31/12
Мітки: кульовим, керування, краном, пристрій
Формула / Реферат:
1. Пристрій для керування кульовим краном, який містить блок керування, магістральний трубопровід і механізм приводу кульового крана, що включає ємність з робочою рідиною, перший насос із приводом і ручний насос, з'єднані з гідроциліндром повороту кульового крана, гідророзподільник, який відрізняється тим, що привід першого насоса виконаний у вигляді реверсивної вихрової турбіни, з'єднаної з магістральним трубопроводом, при цьому механізм...
Автоматизована система керування
Номер патенту: 91773
Опубліковано: 10.07.2014
Автори: Дорощенков Геннадій Дмитрович, Потапова Надія Анатоліївна, Качуровський Сергій Вікторович
МПК: G06F 17/40
Мітки: автоматизована, система, керування
Формула / Реферат:
1. Автоматизована система керування, яка містить центральну систему керування із засобами обміну даними, через які вона з'єднана з підсистемами збору даних і формування єдиної бази даних, яка відрізняється тим, що в неї введено з'єднані з центральною системою керування через її засоби обміну даними аналітично-розрахункову підсистему і підсистему колективного прийняття рішень, яка містить автоматизовані робочі місця експертів-аналітиків та...
Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 55409
Опубліковано: 10.12.2010
Автори: Гуш Роман Миколайович, Кописов Олег Едуардович, Кулік Анатолій Степанович, Дергачов Костянтин Юрійович
МПК: G08G 1/0968
Мітки: місцезнаходженням, об'єкта, керування, рухомого, система
Формула / Реферат:
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації та пристроєм індикації та зв'язку з персональним комп'ютером, джерело живлення, вихід якого через підсистему стабілізації живлення з'єднаний з...
Система керування місцезнаходженням рухомого об’єкта
Номер патенту: 78921
Опубліковано: 10.04.2013
Автори: Кулік Анатолій Степанович, Дергачов Костянтин Юрійович, Лістунов Андрій Вікторович
МПК: G08G 1/0968
Мітки: рухомого, місцезнаходженням, керування, система, об'єкта
Формула / Реферат:
Система керування місцезнаходженням рухомого об'єкта, що містить глобальну супутникову систему, перший вхід якої з'єднаний з виходом передавача, а перший вихід з'єднаний з приймачем, керуючий контролер, вхід якого з'єднаний з приймачем, а виходи з'єднані з енергонезалежним зберігачем інформації, пристроєм індикації та зв'язку з персональним комп'ютером та передавачем, джерело живлення, вихід якого через підсистему стабілізації живлення...