Візуальна кореляційно-екстремальна навігаційна система
Номер патенту: 103491
Опубліковано: 25.12.2015

Формула / Реферат
Візуальна кореляційно-екстремальна навігаційна система, яка містить блок комплексування інформації, інерціальну навігаційну систему (ІНС), магнітний компас, баровисотомір та камеру, яка відрізняється тим, що містить блок абсолютної навігації, який обчислює географічні координати, блок відносної навігації, який визначає складові лінійних швидкостей, базу даних геоінформаційної системи (ГІС), яка містить супутникові ортофотознімки земної поверхні з відповідними навігаційними даними.
Текст
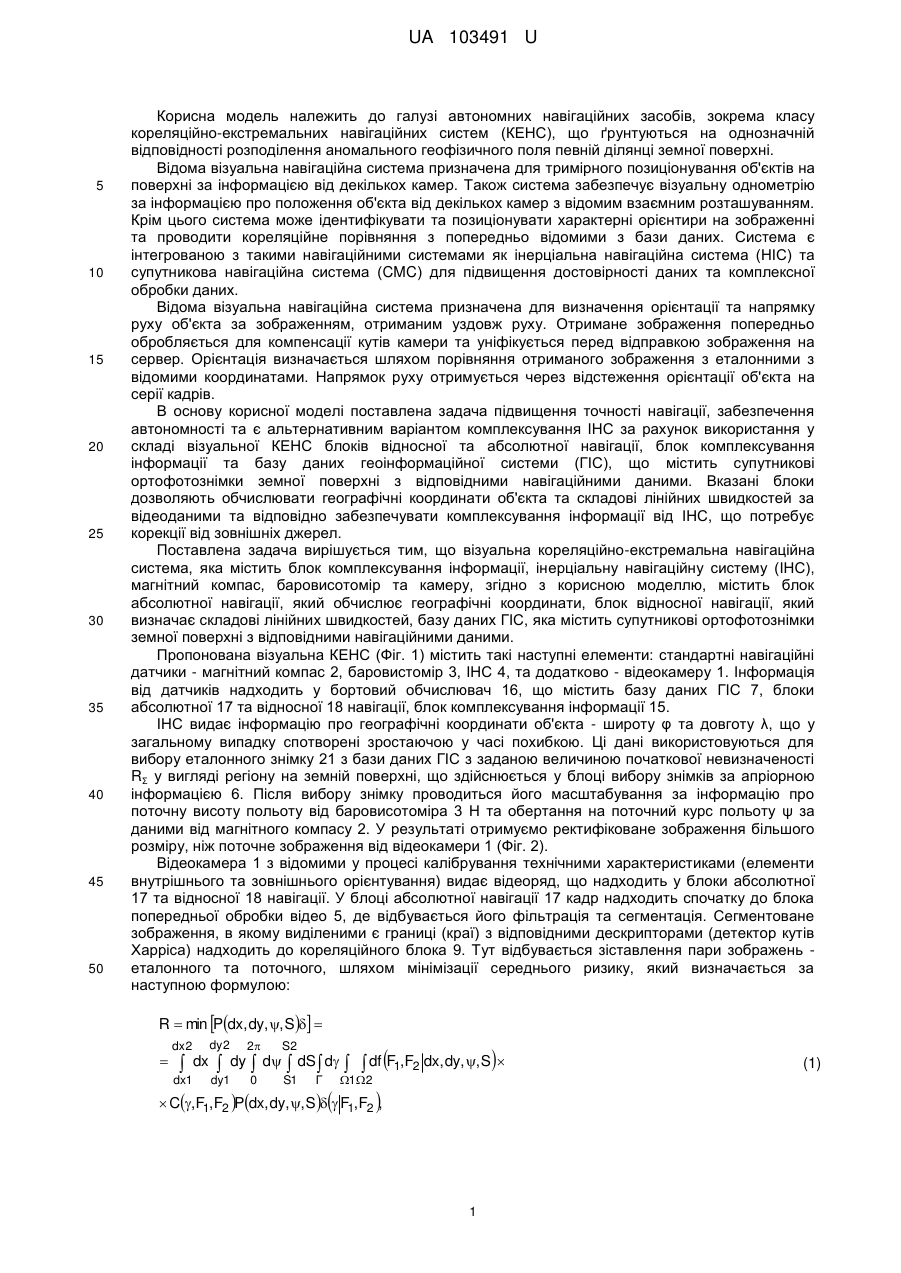
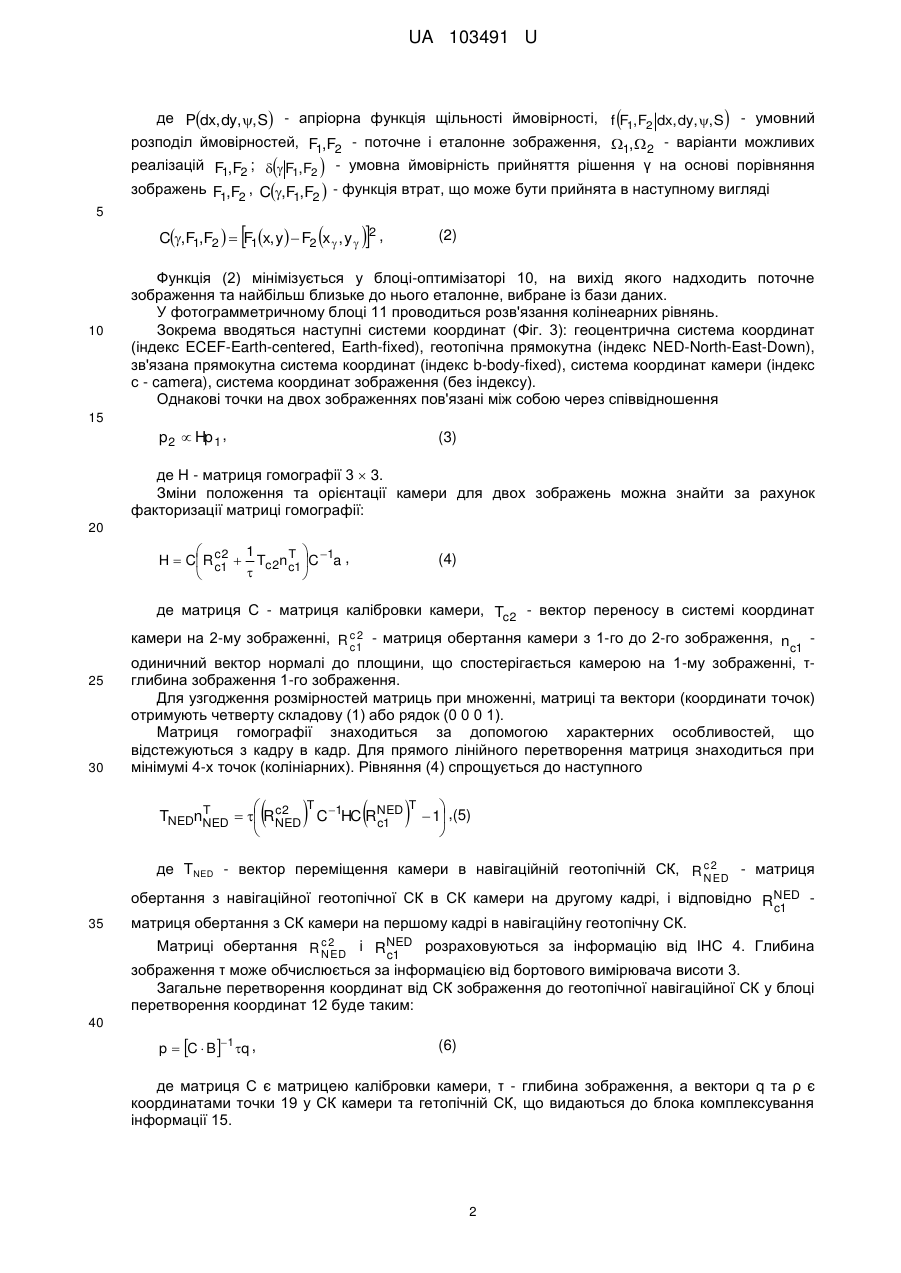
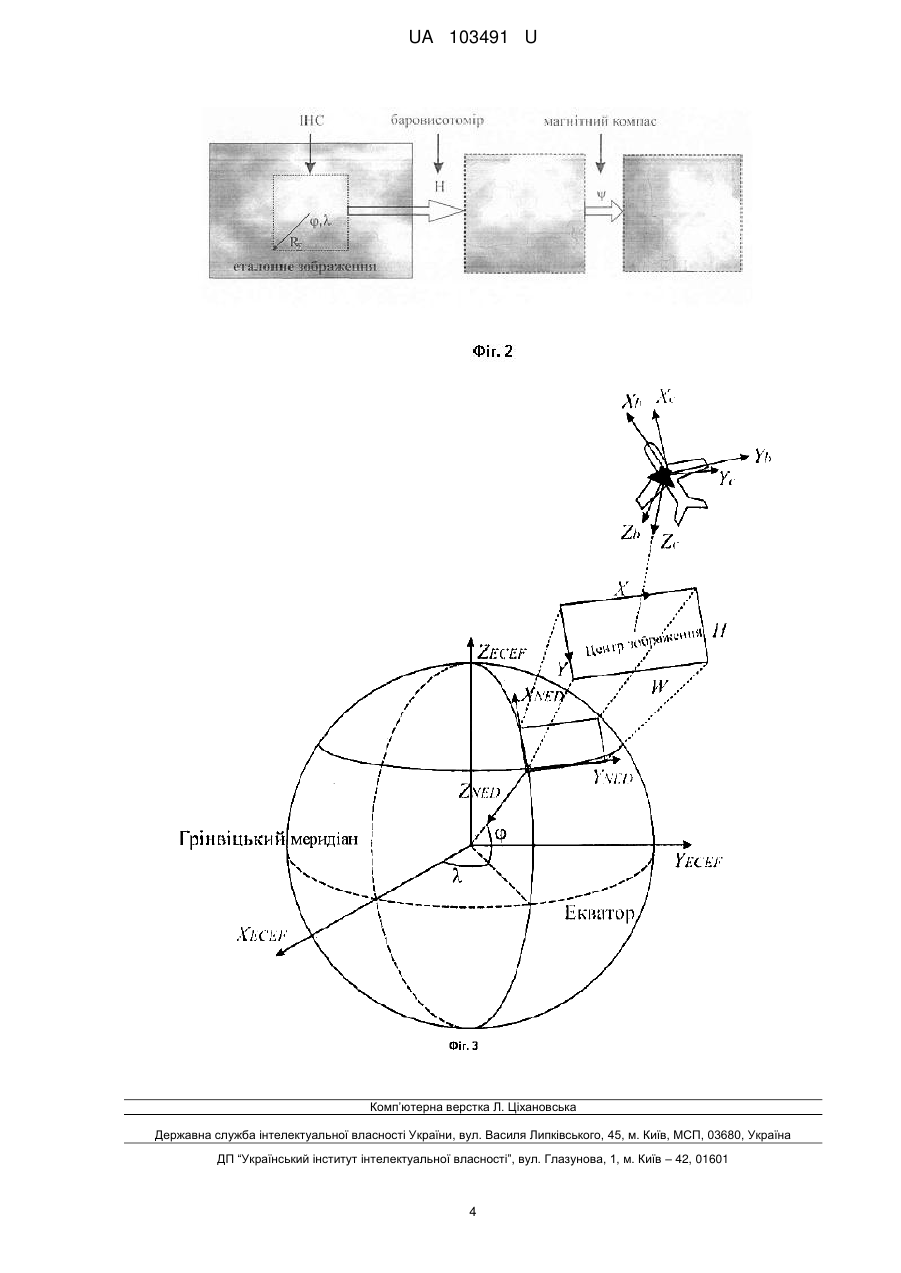
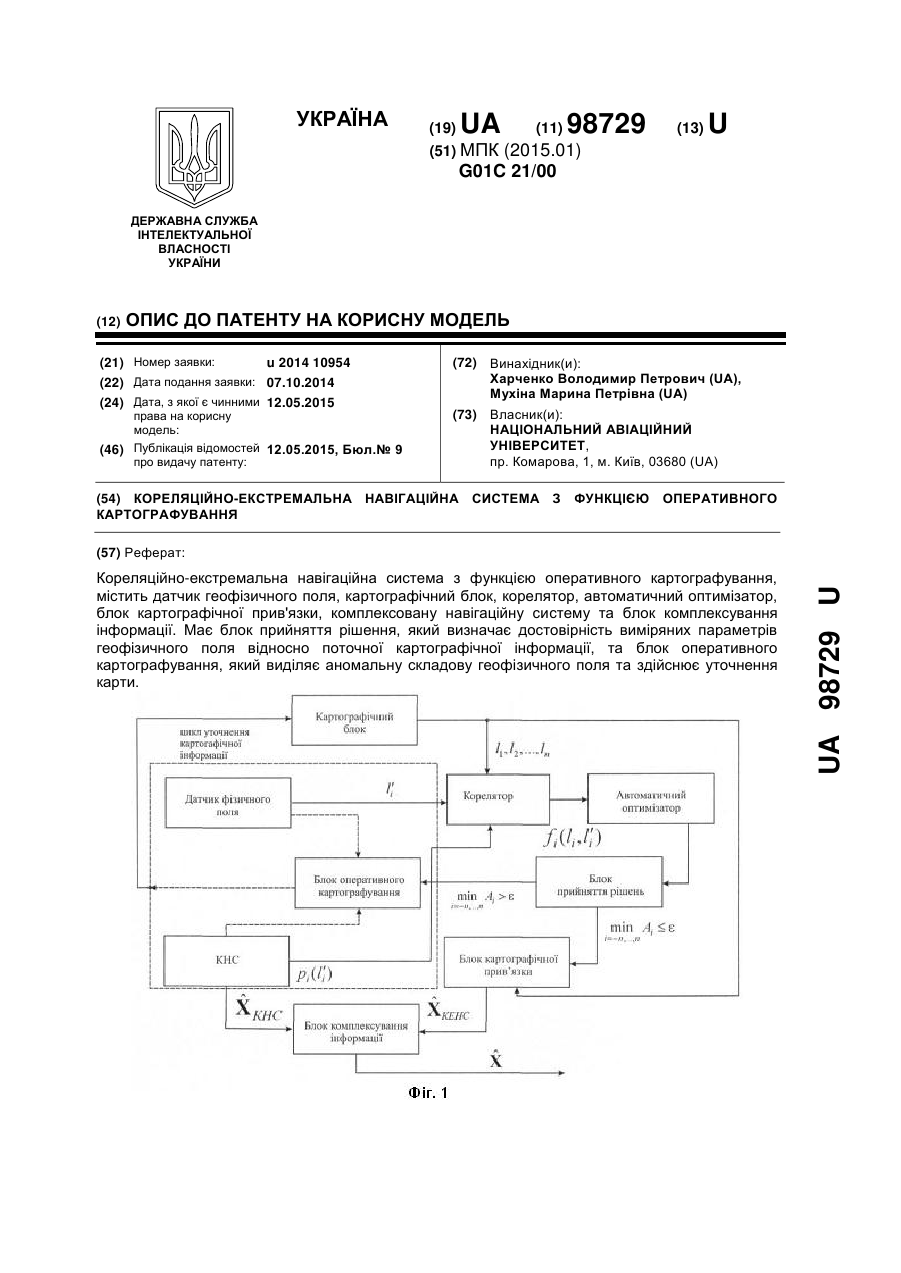
Реферат: UA 103491 U UA 103491 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до галузі автономних навігаційних засобів, зокрема класу кореляційно-екстремальних навігаційних систем (КЕНС), що ґрунтуються на однозначній відповідності розподілення аномального геофізичного поля певній ділянці земної поверхні. Відома візуальна навігаційна система призначена для тримірного позиціонування об'єктів на поверхні за інформацією від декількох камер. Також система забезпечує візуальну однометрію за інформацією про положення об'єкта від декількох камер з відомим взаємним розташуванням. Крім цього система може ідентифікувати та позиціонувати характерні орієнтири на зображенні та проводити кореляційне порівняння з попередньо відомими з бази даних. Система є інтегрованою з такими навігаційними системами як інерціальна навігаційна система (НІС) та супутникова навігаційна система (CMC) для підвищення достовірності даних та комплексної обробки даних. Відома візуальна навігаційна система призначена для визначення орієнтації та напрямку руху об'єкта за зображенням, отриманим уздовж руху. Отримане зображення попередньо обробляється для компенсації кутів камери та уніфікується перед відправкою зображення на сервер. Орієнтація визначається шляхом порівняння отриманого зображення з еталонними з відомими координатами. Напрямок руху отримується через відстеження орієнтації об'єкта на серії кадрів. В основу корисної моделі поставлена задача підвищення точності навігації, забезпечення автономності та є альтернативним варіантом комплексування ІНС за рахунок використання у складі візуальної КЕНС блоків відносної та абсолютної навігації, блок комплексування інформації та базу даних геоінформаційної системи (ГІС), що містить супутникові ортофотознімки земної поверхні з відповідними навігаційними даними. Вказані блоки дозволяють обчислювати географічні координати об'єкта та складові лінійних швидкостей за відеоданими та відповідно забезпечувати комплексування інформації від ІНС, що потребує корекції від зовнішніх джерел. Поставлена задача вирішується тим, що візуальна кореляційно-екстремальна навігаційна система, яка містить блок комплексування інформації, інерціальну навігаційну систему (ІНС), магнітний компас, баровисотомір та камеру, згідно з корисною моделлю, містить блок абсолютної навігації, який обчислює географічні координати, блок відносної навігації, який визначає складові лінійних швидкостей, базу даних ГІС, яка містить супутникові ортофотознімки земної поверхні з відповідними навігаційними даними. Пропонована візуальна КЕНС (Фіг. 1) містить такі наступні елементи: стандартні навігаційні датчики - магнітний компас 2, баровистомір 3, ІНС 4, та додатково - відеокамеру 1. Інформація від датчиків надходить у бортовий обчислювач 16, що містить базу даних ГІС 7, блоки абсолютної 17 та відносної 18 навігації, блок комплексування інформації 15. ІНС видає інформацію про географічні координати об'єкта - широту φ та довготу λ, що у загальному випадку спотворені зростаючою у часі похибкою. Ці дані використовуються для вибору еталонного знімку 21 з бази даних ГІС з заданою величиною початкової невизначеності RΣ у вигляді регіону на земній поверхні, що здійснюється у блоці вибору знімків за апріорною інформацією 6. Після вибору знімку проводиться його масштабування за інформацію про поточну висоту польоту від баровисотоміра 3 Η та обертання на поточний курс польоту ψ за даними від магнітного компасу 2. У результаті отримуємо ректифіковане зображення більшого розміру, ніж поточне зображення від відеокамери 1 (Фіг. 2). Відеокамера 1 з відомими у процесі калібрування технічними характеристиками (елементи внутрішнього та зовнішнього орієнтування) видає відеоряд, що надходить у блоки абсолютної 17 та відносної 18 навігації. У блоці абсолютної навігації 17 кадр надходить спочатку до блока попередньої обробки відео 5, де відбувається його фільтрація та сегментація. Сегментоване зображення, в якому виділеними є границі (краї) з відповідними дескрипторами (детектор кутів Харріса) надходить до кореляційного блока 9. Тут відбувається зіставлення пари зображень еталонного та поточного, шляхом мінімізації середнього ризику, який визначається за наступною формулою: R min Pdx, dy, , S dx1 2 dy 2 dx 2 dx dy1 dy 0 d S2 dS d df F1,F2 dx, dy, , S S1 Г 12 C,F1,F2 Pdx, dy, , S F1,F2 , 1 (1) UA 103491 U де Pdx, dy, , S - апріорна функція щільності ймовірності, f F1,F2 dx, dy, , S - умовний розподіл ймовірностей, F1,F2 - поточне і еталонне зображення, 1, 2 - варіанти можливих реалізацій F1,F2 ; F1,F2 - умовна ймовірність прийняття рішення γ на основі порівняння зображень F1,F2 , C,F1,F2 - функція втрат, що може бути прийнята в наступному вигляді 5 C,F1,F2 F1x, y F2 x , y 10 2 , (2) Функція (2) мінімізується у блоці-оптимізаторі 10, на вихід якого надходить поточне зображення та найбільш близьке до нього еталонне, вибране із бази даних. У фотограмметричному блоці 11 проводиться розв'язання колінеарних рівнянь. Зокрема вводяться наступні системи координат (Фіг. 3): геоцентрична система координат (індекс ECEF-Earth-centered, Earth-fixed), геотопічна прямокутна (індекс NED-North-East-Down), зв'язана прямокутна система координат (індекс b-body-fixed), система координат камери (індекс с - camera), система координат зображення (без індексу). Однакові точки на двох зображеннях пов'язані між собою через співвідношення 15 p 2 Hp 1 , (3) де Η - матриця гомографії 3 3. Зміни положення та орієнтації камери для двох зображень можна знайти за рахунок факторизації матриці гомографії: 20 2 1 T H C R c1 Tc 2n c1 C 1a , c (4) де матриця С - матриця калібровки камери, Tc 2 - вектор переносу в системі координат 25 30 камери на 2-му зображенні, R c 2 - матриця обертання камери з 1-го до 2-го зображення, n c1 c1 одиничний вектор нормалі до площини, що спостерігається камерою на 1-му зображенні, τглибина зображення 1-го зображення. Для узгодження розмірностей матриць при множенні, матриці та вектори (координати точок) отримують четверту складову (1) або рядок (0 0 0 1). Матриця гомографії знаходиться за допомогою характерних особливостей, що відстежуються з кадру в кадр. Для прямого лінійного перетворення матриця знаходиться при мінімумі 4-х точок (колініарних). Рівняння (4) спрощується до наступного c2 T T TNEDnNED RNED C 1HC RNED c1 T 1 ,(5) де TNED - вектор переміщення камери в навігаційній геотопічній СК, R c 2 - матриця NED 35 обертання з навігаційної геотопічної СК в СК камери на другому кадрі, і відповідно RNED c1 матриця обертання з СК камери на першому кадрі в навігаційну геотопічну СК. Матриці обертання R c 2 і RNED розраховуються за інформацію від ІНС 4. Глибина NED c1 зображення τ може обчислюється за інформацією від бортового вимірювача висоти 3. Загальне перетворення координат від СК зображення до геотопічної навігаційної СК у блоці перетворення координат 12 буде таким: 40 p C B1 q , (6) де матриця С є матрицею калібровки камери, τ - глибина зображення, а вектори q та ρ є координатами точки 19 у СК камери та гетопічній СК, що видаються до блока комплексування інформації 15. 2 UA 103491 U 5 10 cos cos cos sin sin dx sin sin cos cos sin sin sin sin cos cos sin cos d y B cos sin cos sin sin cos sin sin sin cos cos cos d z 0 0 0 1 У блоці відносної навігації 18 відбувається зберігання попереднього кадру зображення для його співставлення з поточним (через блок затримки 8) у кореляційному блоці 13. Обраховується за аналогічним принципом детектори кутів Харріса та за формулою (5) добуток у лівій частині має розмірність 33: d x 0 0 d x . d y 0 0 1 0 0 d y d z 0 0 d z При відомих складових правої частини рівняння (5) обчислюються dx, dy у блоці візуальної одометрії 14, які перераховуються у геотопічну СК та, відповідно, на виході отримуємо складові лінійних швидкостей об'єкта 20. У блоці комплексування інформації 15 відбувається сумісна обробка даних від ІНС 4 та блоків візуальної абсолютної 17 та відносно 18 навігації за розділеною гаусівською точковою фільтрацію нелінійної частини та калманівською фільтрацію лінійних складових. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Візуальна кореляційно-екстремальна навігаційна система, яка містить блок комплексування інформації, інерціальну навігаційну систему (ІНС), магнітний компас, баровисотомір та камеру, яка відрізняється тим, що містить блок абсолютної навігації, який обчислює географічні координати, блок відносної навігації, який визначає складові лінійних швидкостей, базу даних геоінформаційної системи (ГІС), яка містить супутникові ортофотознімки земної поверхні з відповідними навігаційними даними. 3 UA 103491 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 21/00
Мітки: кореляційно-екстремальна, система, візуальна, навігаційна
Код посилання
<a href="https://ua.patents.su/6-103491-vizualna-korelyacijjno-ekstremalna-navigacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Візуальна кореляційно-екстремальна навігаційна система</a>
Кореляційно-екстремальна навігаційна система з функцією оперативного картографування
Номер патенту: 98729
Опубліковано: 12.05.2015
Автори: Харченко Володимир Петрович, Мухіна Марина Петрівна
МПК: G01C 21/00
Мітки: оперативного, функцією, картографування, система, навігаційна, кореляційно-екстремальна
Формула / Реферат:
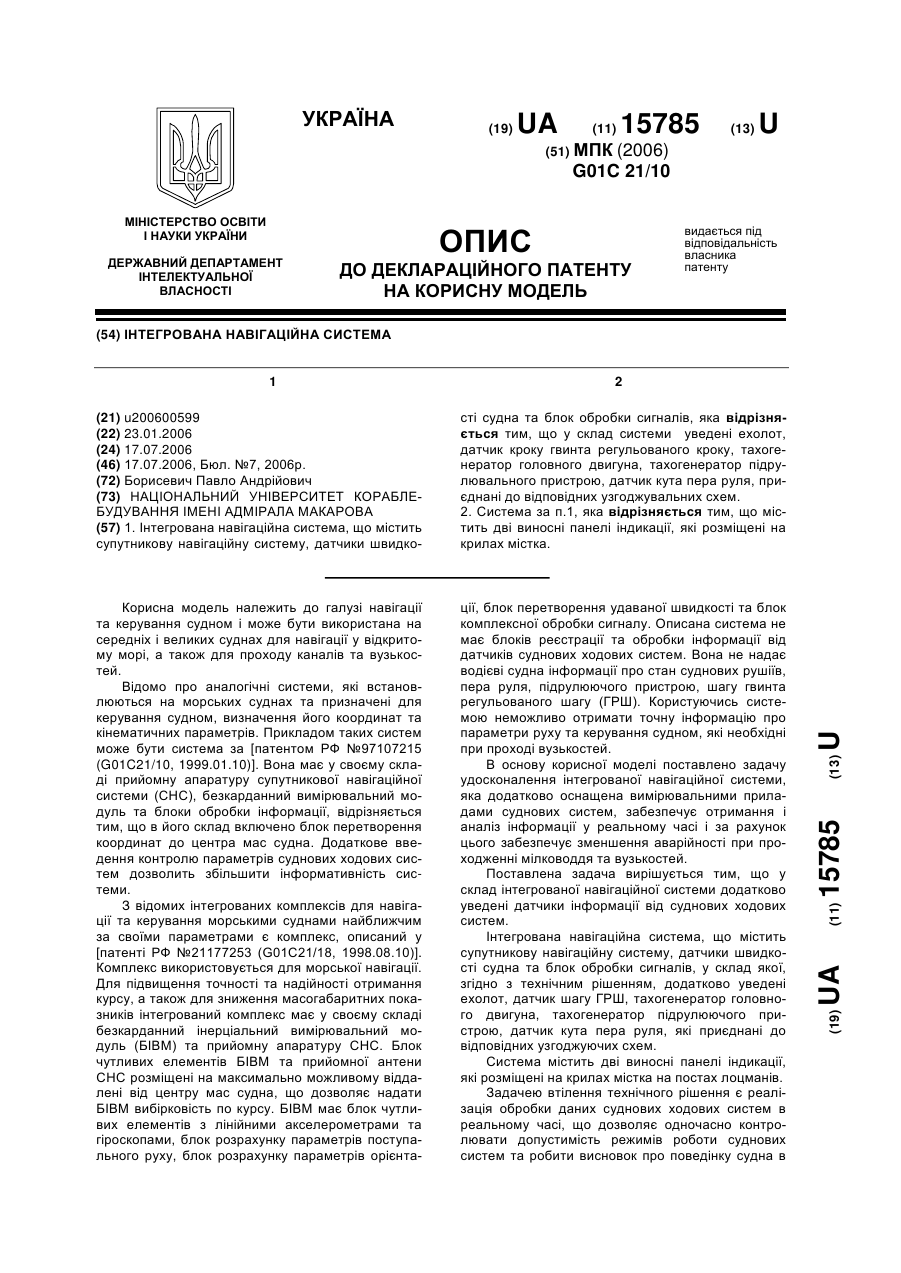
Кореляційно-екстремальна навігаційна система з функцією оперативного картографування, яка містить датчик геофізичного поля, картографічний блок, корелятор, автоматичний оптимізатор, блок картографічної прив'язки, комплексовану навігаційну систему та блок комплексування інформації, яка відрізняється тим, що має блок прийняття рішення, який визначає достовірність виміряних параметрів геофізичного поля відносно поточної картографічної...
Інтегрована навігаційна система
Номер патенту: 15785
Опубліковано: 17.07.2006
Автор: Борисевич Павло Андрійович
МПК: G01C 21/10
Мітки: система, навігаційна, інтегрована
Формула / Реферат:
1. Інтегрована навігаційна система, що містить супутникову навігаційну систему, датчики швидкості судна та блок обробки сигналів, яка відрізняється тим, що у склад системи уведені ехолот, датчик кроку гвинта регульованого кроку, тахогенератор головного двигуна, тахогенератор підрулювального пристрою, датчик кута пера руля, приєднані до відповідних узгоджувальних схем.2. Система за п. 1, яка відрізняється тим, що містить дві...
Малогабаритна інерціально-супутникова інтегрована навігаційна система
Номер патенту: 79932
Опубліковано: 13.05.2013
Автори: Вишнякова Євгенія Вікторівна, Трикоз Валерій Павлович, Кондратюк Марина Василівна, Кондратюк Василь Михайлович, Савченко Олексій Володимирович, Харченко Володимир Петрович, Вальденмайєр Георгій Георгійович, Васильєв Ігор Васильович, Тунік Анатолій Азарійович, Ільницька Світлана Іванівна, Куценко Олександр Вікторович
МПК: G01C 23/00
Мітки: навігаційна, інтегрована, система, інерціально-супутникова, малогабаритна
Формула / Реферат:
Малогабаритна інерціально-супутникова інтегрована навігаційна система, що містить багатоканальний радіоприймач, вхід якого через підсилювач з'єднаний з антеною, а виходи підключені до обчислювача місцеположення навігаційних супутників, блок початкової установки альманаху даних про супутники, що підключений виходами до входу обчислювача місцеположення супутників, таймер, підключений виходом до синхронізуючого входу обчислювача місцеположення...
Комплексна навігаційна система
Номер патенту: 42148
Опубліковано: 15.10.2001
Автор: Бакулін Ігор Євгенович
МПК: G01C 23/00
Мітки: система, комплексна, навігаційна
Формула / Реферат:
Комплексна навігаційна система, що включає інерційну навігаційну систему з використанням як коригований вимірювач, перший і другий відраховувальні пристрої і високоточну кореляційно - екстремальну навігаційну систему з використанням як коригувальний вимірювач, яка відрізняється тим, що у пристрій додатково введені електронний ключ, запам'ятовувальний пристрій і блок керування, причому послідовно з'єднані електронний ключ і запам'ятовувальний...
Електронна картографічна навігаційна і інформаційна система
Номер патенту: 110063
Опубліковано: 10.11.2015
Автори: Шишкін Олександр Володимирович, Кошевий Віталій Михайлович
МПК: H04B 7/26, G01C 21/00
Мітки: інформаційна, система, навігаційна, електронна, картографічна
Формула / Реферат:
Електронна картографічна навігаційна і інформаційна система, що містить процесорний блок з портами для підключення зовнішніх пристроїв - радіолокаційної станції, автоматичної ідентифікаційної системи (АІС), приймача супутникової навігації GPS, лага і гірокомпаса, яка відрізняється тим, що введені модуль формування повідомлень цифрового вибіркового виклику (ЦВВ), модуль маркування цілей АІС, модуль обробки повідомлень ЦВВ, порт виведення...
Попередній патент: Пристрій для множення елементів скінченного поля gf(2m) на комбінаційних схемах
Наступний патент: Генераторний агрегат
Випадковий патент: Спосіб біологічної боротьби з виляганням конюшини лучної та гібридної