Адаптивна вібраційна машина з тороїдальною робочою камерою
Номер патенту: 104061
Опубліковано: 25.12.2013
Автори: Чубик Роман Васильович, Ярошенко Леонід Вікторович, Яремчук Олександр Степанович

Формула / Реферат
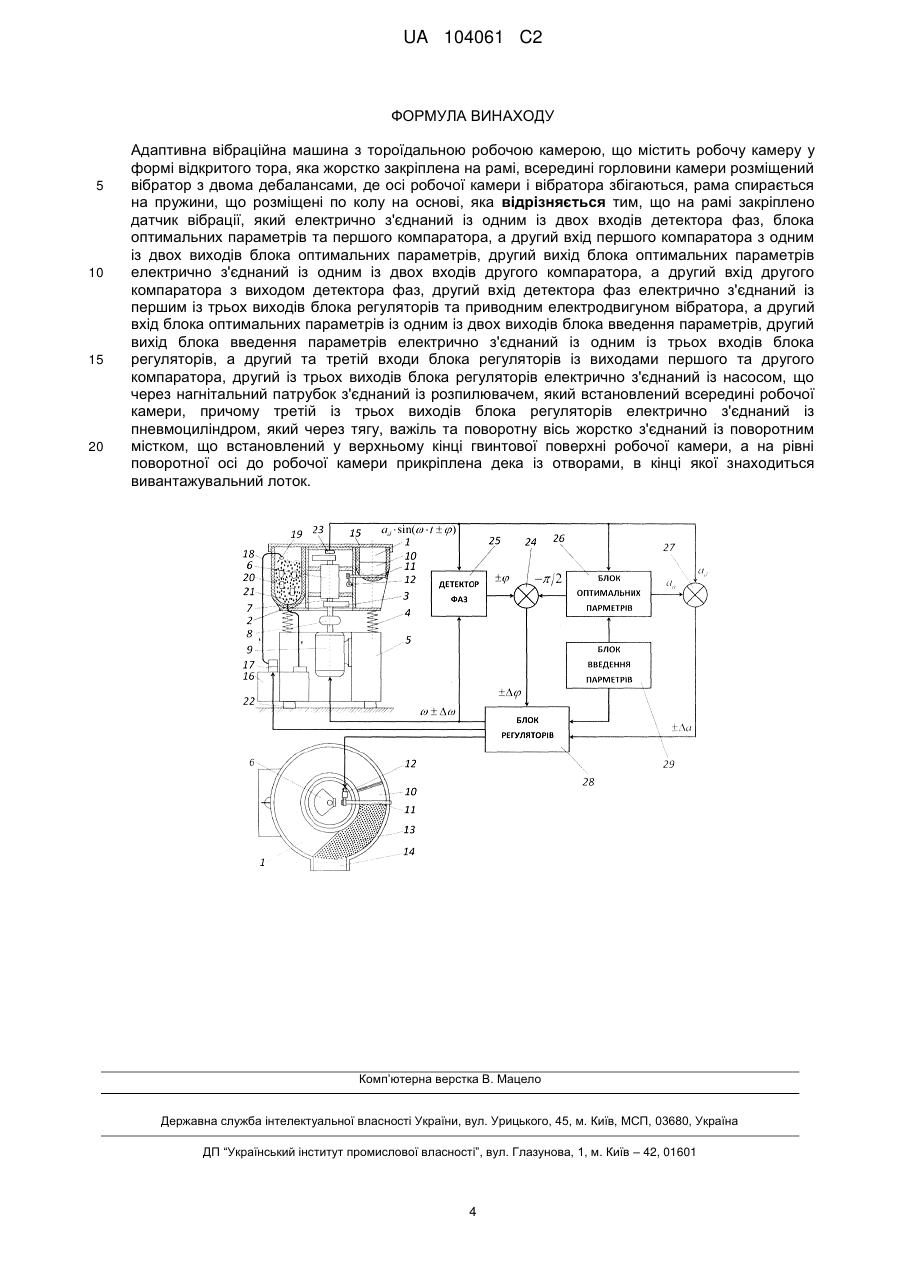
Адаптивна вібраційна машина з тороїдальною робочою камерою, що містить робочу камеру у формі відкритого тора, яка жорстко закріплена на рамі, всередині горловини камери розміщений вібратор з двома дебалансами, де осі робочої камери і вібратора збігаються, рама спирається на пружини, що розміщені по колу на основі, яка відрізняється тим, що на рамі закріплено датчик вібрації, який електрично з'єднаний із одним із двох входів детектора фаз, блока оптимальних параметрів та першого компаратора, а другий вхід першого компаратора з одним із двох виходів блока оптимальних параметрів, другий вихід блока оптимальних параметрів електрично з'єднаний із одним із двох входів другого компаратора, а другий вхід другого компаратора з виходом детектора фаз, другий вхід детектора фаз електрично з'єднаний із першим із трьох виходів блока регуляторів та приводним електродвигуном вібратора, а другий вхід блока оптимальних параметрів із одним із двох виходів блока введення параметрів, другий вихід блока введення параметрів електрично з'єднаний із одним із трьох входів блока регуляторів, а другий та третій входи блока регуляторів із виходами першого та другого компаратора, другий із трьох виходів блока регуляторів електрично з'єднаний із насосом, що через нагнітальний патрубок з'єднаний із розпилювачем, який встановлений всередині робочої камери, причому третій із трьох виходів блока регуляторів електрично з'єднаний із пневмоциліндром, який через тягу, важіль та поворотну вісь жорстко з'єднаний із поворотним містком, що встановлений у верхньому кінці гвинтової поверхні робочої камери, а на рівні поворотної осі до робочої камери прикріплена дека із отворами, в кінці якої знаходиться вивантажувальний лоток.
Текст
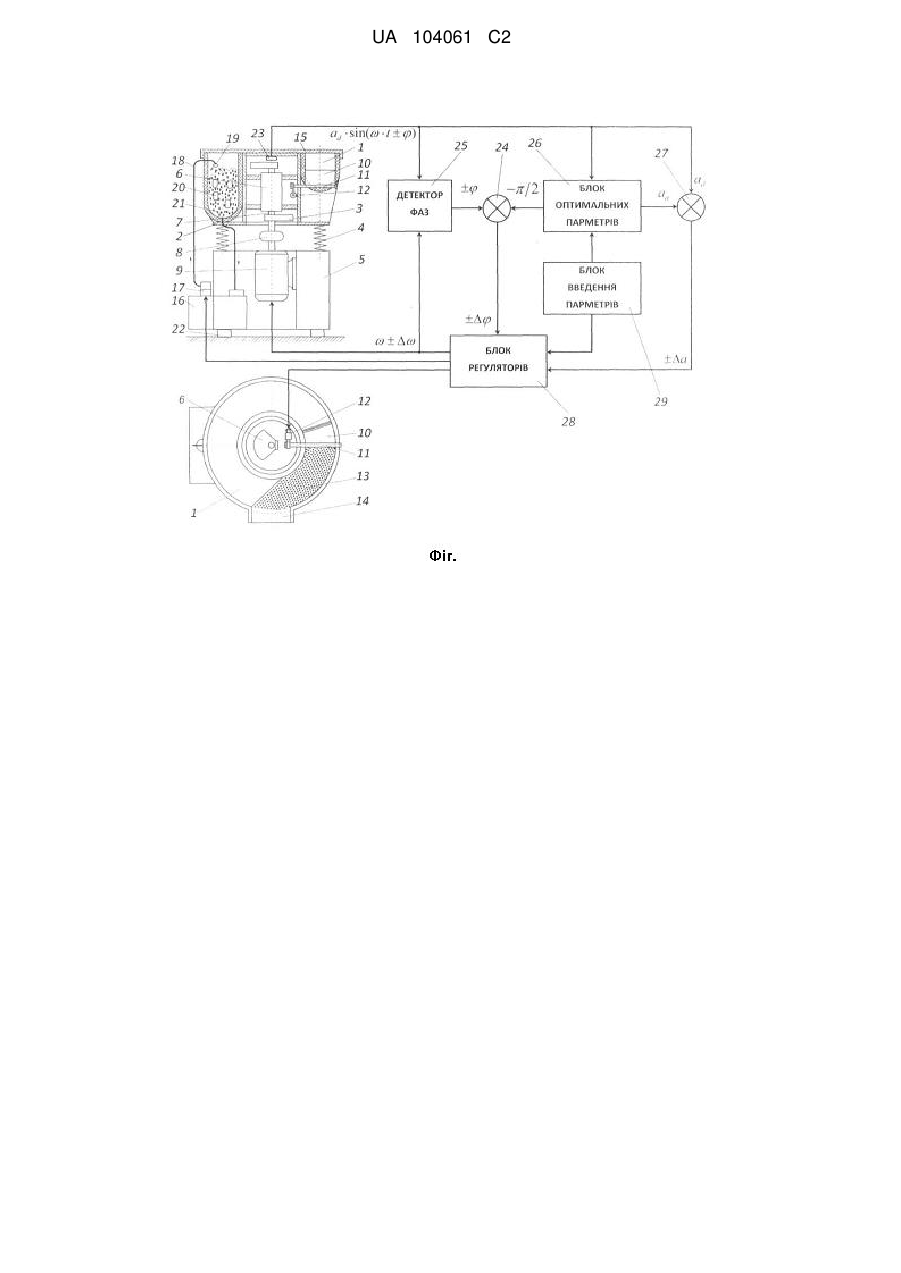
Реферат: Винахід належить до оздоблювально-зачисної та зміцнювальної обробки деталей. Адаптивна вібраційна машина із тороїдальною робочою камерою містить вібратор та датчик вібрації. Останній електрично з'єднаний зі схемою, що містить детектор фаз, блок оптимальних параметрів, компаратори, блок регуляторів, блок введення параметрів. Блок регуляторів електрично з'єднаний із насосом та із пневмоциліндром поворотного містка. Останній встановлений у верхньому кінці гвинтової поверхні робочої камери. На рівні поворотної осі до робочої камери прикріплена дека із отворами, в кінці якої знаходиться вивантажувальний лоток. Технічним результатом є забезпечення постійного резонансного режиму роботи для зменшення затрат електроенергії на вібропривод при одночасній автоматизації відокремлення та вивантаження оброблюваних деталей. UA 104061 C2 (12) UA 104061 C2 UA 104061 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до техніки вібраційної обробки деталей у машинобудуванні і може бути використаний для оздоблювально-зачисної та зміцнювальної обробки деталей з метою шліфування, полірування, заокруглень гострих кромок, поверхневого зміцнення, видалення задирок, нагару та ін. Відома вібраційна машина з тороїдальною робочою камерою (Диментберг Ф.М., Фролов КБ. Вибрация в технике и человек. - Μ.: Знание, 1987. - 160 с. Стор. 100, мал. 89 ж), яка містить робочу камеру у формі відкритого тора, що жорстко закріплена на рамі, всередині горловини камери, розміщений вібратор з двома дебалансами, осі робочої камери і вібратора збігаються, рама установки спирається на пружини, що розміщені по колу на основі. Недоліком даної вібраційної машини є неможливість забезпечення постійного резонансного режиму роботи при змінній масі завантаження робочої камери деталями та робочим середовищем та неможливість підтримувати технологічно оптимальні параметри коливань робочої камери на заданому рівні, а також складність відокремлення оброблених деталей від робочого середовища та їх вивантаження з робочої камери. В основу винаходу поставлено задачу у адаптивній вібраційній машині з тороїдальною робочою камерою, шляхом забезпечення постійного резонансного режиму роботи при змінній масі завантаження робочої камери деталями та робочим середовищем, зменшити енергозатрати на дебалансний вібропривід робочої камери а шляхом механізації відділення оброблюваних деталей від робочого середовища розширити технологічні можливості адаптивної вібраційної машини. Поставлена задача вирішується тим, що у адаптивній вібраційній машині з тороїдальною робочою камерою, яка містить робочу камеру у формі відкритого тора, що жорстко закріплена на рамі, всередині горловини камери, розміщений вібратор з двома дебалансами, осі робочої камери і вібратора збігаються, рама установки спирається на пружини, що розміщені по колу на основі, згідно з винаходом, на рамі закріплено давач вібрації, який електрично з'єднаний із одним із двох входів детектора фаз блока оптимальних параметрів та першого компаратора, другий вхід першого компаратора із одним із двох виходів блока оптимальних параметрів, а другий вихід блока оптимальних параметрів електрично з'єднаний із одним із двох входів другого компаратора, другий вхід другого компаратора із виходом детектора фаз, а другий вхід детектора фаз електрично з'єднаний із першим із трьох виходів блока регуляторів та привідним електродвигуном вібратора, другий вхід блока оптимальних параметрів електрично з'єднаний із одним із двох виходів блока введення параметрів, а другий вихід блока введення параметрів - із одним із трьох входів блока регуляторів, другий та третій входи блока регуляторів електрично з'єднані із виходами першого та другого компаратора, а другий із трьох виходів блока регуляторів - із насосом, що через нагнітальний патрубок з'єднаний з розпилювачем усередині робочої камери, третій із трьох виходів блока регуляторів електрично з'єднаний із пневмоциліндром механізму відділення оброблюваних деталей від робочого середовища, який через тягу, важіль та поворотну вісь жорстко з'єднаний із поворотним містком, що встановлений у верхньому кінці гвинтової поверхні робочої камери, причому на рівні поворотної осі до робочої камери прикріплена дека із отворами вкінці якої знаходиться вивантажувальний лоток. Конструктивна схема адаптивної вібраційної машини з тороїдальною робочою камерою зображена на фіг. 1. Адаптивна вібраційна машина з тороїдальною робочою камерою містить основу 5 на якій за допомогою пружних елементів 4, що рівномірно розподілені по колу встановлено робочу камеру 1, що жорстко закріплена на рамі 2, з розташованим всередині керованим дебалансним вібратором, що складається підшипникового вузла 6 у підшипниках якого встановлено вертикальний вал 7 з верхньою та нижньою парами дебалансних вантажів 3. Вертикальний вал 7 через еластичну муфту 8 з'єднаний з приводним електродвигуном 9. Механізм сепарації (відділення оброблюваних деталей від робочого середовища) встановлюється у верхньому кінці гвинтової поверхні робочої камери 1 і містить поворотний місток 10, що кріпиться до поворотної осі 11, яка через тяги і важелі з'єднується з пневмоциліндром 12. Механізм сепарації містить також деку з отворами 13, що прикріплена до робочої камери 1 горизонтально, на рівні поворотної осі 11 таким чином, щоб між декою 13 та поворотним містком 10 у крайньому положенні, не було просипання робочого середовища 21. В кінці деки 13 знаходиться вивантажувальний лоток 14. Тороїдальна робоча камера 1 накривається шумопоглинаючим ковпаком 15. Система подачі, видалення і регенерації робочої рідини містить бак відстійник 16 з насосом 17 та зливним і нагнітальним патрубками 18 з розпилювачем 19, що встановлюється усередині робочої камери 1. На рамі 2 закріплено давач вібрації 23, що електрично з'єднаний із блоком оптимальних параметрів 26. компаратором 27 та детектором фаз 25. Блок оптимальних параметрів 26 своїми виходами з'єднаний компаратором 27 та компаратором 24. Привідний електродвигун 9 електрично з'єднаний із входом детектора 1 UA 104061 C2 5 10 15 20 25 30 35 40 45 50 55 60 зсуву фаз 25, а вихід детектора зсуву фаз з'єднаний із компаратором 24. Інформація із двох компараторів 24 та 27 надходить в блок регуляторів 28. Інформація про технологічні параметри віброобробки надходить із блока введення 29 в блок оптимальних параметрів 26 та блок регуляторів 28. Блок регуляторів 28 електрично з'єднаний та керує системою віброприводу (приводним двигуном 9 та керованим дебалансним вібратором), механізмом сепарації (відділення деталей 20 від робочого середовища 21) через пневмоциліндр 12 та системою подачі, видалення і регенерації рідини через насос 17. Тороїдальна робоча камера 1 адаптивної вібраційної машини заповнюється оброблюваними деталями 20 та робочим середовищем 21. Основа 5 встановлюється горизонтально на чотирьох віброопорах 22. Адаптивна вібраційна машина з тороїдальною робочою камерою працює таким чином. Перед обробкою робоча камера 1 завантажується оброблюваними деталями 20 та робочим середовищем 21 у співвідношенні, яке визначається вимогами технологічного процесу. При включенні приводного електродвигуна 9, обертовий рух через еластичну муфту 8 передається до вертикального вала 7 із верхньою та нижньою парами керованих дебалансних вантажів 3, що призводить до виникнення системи двох взаємно нерухомих обертових відцентрових сил, які діють на вертикальний вал 7. Під дією цих сил генеруються складні просторові коливання тороїдальної робочої камери 1, які можна розглядати як суму двох коливань: поступальних коливань її центру мас по горизонтальній круговій траєкторії та кутових коливань навколо центру мас у вертикальній площині. При цьому кожна точка робочої поверхні камери 1 коливається по траєкторії, яка має форму нахиленого під певним кутом до горизонтальної площини еліпса. При цьому точки поверхонь робочої камери 1, які лежать на концентричному із віссю вертикального вала 7 колі, здійснюють ці коливання із зсувом фаз одна відносно одної. Такі коливання точок поверхонь робочої камери 1 можна розглядати як розповсюдження вздовж її кінцевої осі квазіхвиль, що складаються із біжучих повздовжньої і поперечної квазіхвиль, які зсунуті одна відносно одної на 90°. При цьому хвилеві фронти обох квазіхвиль мають форму площин, які проходять через вісь вертикального вала 7, а довжина квазіхвиль рівна довжині концентричного із віссю вала 7 кола, вздовж якого вона розповсюджується. Такі коливання точок поверхонь робочої камери 1, призводять до інтенсивного перемішування і вібротранспортування оброблюваних деталей 20 та робочого середовища 21 вздовж спіральної доріжки робочої камери 1. При цьому гранули робочого середовища 21 та оброблювані деталі 20 набувають достатній для здійснення роботи рівень кінетичної енергії і створюється максимальна різниця швидкостей між оброблюваними деталями 20 і гранулами робочого середовища 21 а при їхньому рівномірному та інтенсивному перемішуванні утворюється вільний доступ часток робочого середовища до всіх оброблюваних поверхонь деталей, що забезпечує рівномірність і високу якість оздоблювально-зачисної обробки деталей 20 частинками робочого середовища 21. Зміна маси (кількості) технологічної рідини та зміна кількості деталей, що надходять на обробку, а також зміна кількості деталей що безпосередньо знаходяться в тороїдальній робочій камері 1 в циклі віброобробки впливають призводять до зміни сумарної маси робочої камери і її завантаження. Така зміна сумарної маси в часі, викликає зміну власної резонансної частоти коливань тороїдальної робочої камери ω 0, що в свою чергу при сталій частоті циклічної вимушуючої сили, яку генерує керований дебалансний вібратор, викликатиме зміну амплітуди коливань робочої камери 1. Інформація про амплітуду, фазу і частоту коливань робочої камери 1 із датчика вібрації 23 надходить у детектор фаз 25. У детектор фаз 25 також надходить інформація про частоту та фазу циклічної вимушуючої сили, яку генерує керований дебалансний вібратор. Відповідно до [1, 2] при резонансі фаза амплітуди коливань робочої камери 1 буде відставати від амплітуди циклічної вимушуючої сили, яку генерує керований дебалансний вібратор, на -/2. Тому в детекторі фаз 25 проводиться визначення величини відставання (випередження) фази коливань камери 1 від вимушуючої циклічної сили ±, яку генерує керований дебалансний вібратор. Інформацію про реальну різницю фаз між коливанням камери 1, та вимушуючої сили вібратора у формі кута ±φ надходить на компаратор 24, де постійно порівнюється із заданим енергетично оптимальним -/2. Інформація про оптимальне значення -/2 (резонанс) в компаратор 24 надходить із блока оптимальних параметрів, куди вона була введена оператором через блок введення параметрів 29. В результаті порівняння існуючої фази ±φ із заданою оптимальною із енергетичної точки зору -/2 отримується інформація ±φ про те на скільки і в яку сторону коливна система в результаті зміни сумарної маси робочої камери 1 відійшла від резонансного режиму роботи. На основі даної інформації блок регуляторів 28 проводить корекцію частоти циклічної вимушуючої сили керованого дебалансного вібратора на величину ±о з метою забезпечення та постійно підтримування рівності її із власною резонансною частотою (тобто -0), що забезпечуватиметься при ±φ = 0. Даний контур здатний забезпечити та підтримувати 2 UA 104061 C2 5 10 15 20 25 30 35 40 45 50 55 резонансний режим роботи (коливань) тороїдальної робочої камери 1 при зміні маси завантажених деталей 20, робочої рідини та робочого середовища. Кількість рідини, що подається в камеру 1, залежно від технологічно зумовлених параметрів процесу віброобробки, керується блоком регуляторів 28, через блок введення параметрів 29. Отже, даний контур керування (корекції) частоти здатний забезпечити мінімальні енергозатрати на привод керованого дебалансного вібратора при заданих комбінаціях мас деталей 20, робочого середовища 21 та технологічної рідини. Для усунення можливості виникнення бракованих виробів (для покращення та розширення технологічних можливостей адаптивної тороїдальної машини) пов'язаних із плаванням амплітуди коливань тороїдальної камери 1 введено в другий контур керування (стабілізації). Суть стабілізації базується на забезпеченні сталості питомої роботи вібраційного поля тороїдальної камери 1 відповідно до способу [3]. Тобто, якщо із технологічної точки зору партію деталей необхідно обробляти протягом заданого часу tz, при заданих параметрах коливань 2 камери 1 z та z тобто при певній заданій питомій роботі вібраційного поля, що рівна А = 2 z . Виходячи із даного співвідношення в блоці оптимальних параметрів 26 на основі дійсної частоти коливань 0 тороїдальної камери 1, та із міркувань сталості питомої роботи вібраційного поля камери 1, проводиться визначення необхідного значення амплітуди аn її 2 2 2 2 коливань на новій частоті 0 тобто = . Інформація про необхідне значення амплітуди коливань тороїдальної камери 1 на резонансній частоті коливань 0 передається в компаратор 27 де порівнюється із дійсною амплітудою її коливань і в результаті на виході компаратора отримується величина ±а яка показує на скільки і в яку сторону відхиляється амплітуда коливань робочої камери 1 від необхідної амплітуди для забезпечення сталості питомої роботи вібраційного поля робочої камери 1. Дана інформація надходить в блок регуляторів 28, де на основі ±а формується зміна амплітуди циклічної вимушуючої сили керованого дебалансного вібратора на величину F, шляхомзміни кута між дебалансами у верхній та нижній парі дебалансів 3 на величину ±. Стабілізація питомої роботи вібраційного поля на заданому технологічно оптимальному рівні дозволяє забезпечити задані показники якості віброобробки при заданому часі віброобробки деталей 20 в тороїдальній камері 1. Після закінчення часу віброобробки tz (введеного оператором через блок введення параметрів 29) блок регуляторів 28 формує команду на включення пневмоциліндра 12, який через тягу, важіль та поворотну вісь 11, провертає поворотний місток 10 у нижнє положення і все завантаження робочої камери 1 (оброблювані деталі 20 та робоче середовище 21) спрямовуються на деку з отворами 13. При проходженні завантаження робочої камери 1 через деку з отворами 13 гранули робочого середовища 21, що мають розміри менші за діаметри отворів деки 13, провалюються через ці отвори в робочу камеру 1, а оброблені деталі 20, що мають розміри більші за діаметри отворів деки 13, транспортуються по деці 13 і через вивантажувальний лоток 14 спрямовуються у приймальні ємності, що знаходяться під ним. Після чого у робочу камеру 1 можна завантажити нову партію оброблюваних деталей. Автоматизація процесу: забезпечення резонансного режиму роботи (отримання мінімально можливих затрат електроенергії на привод керованого дебалансного вібратора), вивантаження оброблюваних деталей, забезпечення заданої (оптимальної) технологічно зумовленої кількості різних хімічних добавок відносно до маси завантаження робочої камери деталями, стабілізація (інтенсивності віброобробки, продуктивності, ...) питомої роботи вібраційного поля тороїдальної робочої камери при зміні в часі сумарної маси її завантаження дозволяє зменшити енергозатрати на вібропривід та інтегрувати такі технологічні процеси як зняття нагару, видалення задирок (заокруглення гострих кромок) декоративне шліфування, полірування та оздоблювально-зміцнюючу обробку деталей в гнучкі технологічні лінії багатьох галузей промисловості. Література: 1. Хайкии С. Э. Физические основы механики. -М.: Наука, 1971. -751 с. 2. Пат. 87776 А Україна, B65G27/00. Спосіб керування роботою адаптивних вібраційних технологічних машин. Середа Л.П., Чубик Р.В., Ярошенко Л.В. (Україна). - № а200803685; Опубл. 10.08.2009; Бюл. № 15, 4 с. 3. Пат. 92041 А Україна, B65G27/100. Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин. Середа Л.П., Чубик Р.В., Ярошенко Л.В. (Україна). - № а 200806209; Опубл. 27.09.2010; Бюл. № 18, 3 с. 3 UA 104061 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 Адаптивна вібраційна машина з тороїдальною робочою камерою, що містить робочу камеру у формі відкритого тора, яка жорстко закріплена на рамі, всередині горловини камери розміщений вібратор з двома дебалансами, де осі робочої камери і вібратора збігаються, рама спирається на пружини, що розміщені по колу на основі, яка відрізняється тим, що на рамі закріплено датчик вібрації, який електрично з'єднаний із одним із двох входів детектора фаз, блока оптимальних параметрів та першого компаратора, а другий вхід першого компаратора з одним із двох виходів блока оптимальних параметрів, другий вихід блока оптимальних параметрів електрично з'єднаний із одним із двох входів другого компаратора, а другий вхід другого компаратора з виходом детектора фаз, другий вхід детектора фаз електрично з'єднаний із першим із трьох виходів блока регуляторів та приводним електродвигуном вібратора, а другий вхід блока оптимальних параметрів із одним із двох виходів блока введення параметрів, другий вихід блока введення параметрів електрично з'єднаний із одним із трьох входів блока регуляторів, а другий та третій входи блока регуляторів із виходами першого та другого компаратора, другий із трьох виходів блока регуляторів електрично з'єднаний із насосом, що через нагнітальний патрубок з'єднаний із розпилювачем, який встановлений всередині робочої камери, причому третій із трьох виходів блока регуляторів електрично з'єднаний із пневмоциліндром, який через тягу, важіль та поворотну вісь жорстко з'єднаний із поворотним містком, що встановлений у верхньому кінці гвинтової поверхні робочої камери, а на рівні поворотної осі до робочої камери прикріплена дека із отворами, в кінці якої знаходиться вивантажувальний лоток. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюYaroshenko Leonid Viktorovych, Chubyk Roman Vasyliovych, Yaremchuk Oleksandr Stepanovych
Автори російськоюЯрошенко Леонид Викторович, Чубик Роман Васильевич, Яремчук Александр Степанович
МПК / Мітки
МПК: B24B 31/073, B06B 1/16
Мітки: машина, робочою, камерою, вібраційна, адаптивна, тороїдальною
Код посилання
<a href="https://ua.patents.su/6-104061-adaptivna-vibracijjna-mashina-z-torodalnoyu-robochoyu-kameroyu.html" target="_blank" rel="follow" title="База патентів України">Адаптивна вібраційна машина з тороїдальною робочою камерою</a>
Вібраційна машина
Номер патенту: 48842
Опубліковано: 15.08.2002
Автори: Ланець Олексій Степанович, Гаврильченко Олександр Віталійович
МПК: B06B 1/02
Мітки: машина, вібраційна
Формула / Реферат:
Вібраційна машина, що містить симетричну відносно горизонтальної площини реактивну масу, яка віброізолюючими стержнями з'єднана з рамою, симетрично розташовані відносно тієї ж горизонтальної площини першу та другу активні маси, перший та другий колові електромагнітні віброзбудники, першу та другу плоскі пружні системи, перший та другий контейнери, причому перша та друга активні маси з'єднані між собою вертикально розташованим пружним...
Вібраційна машина об’ємної обробки
Номер патенту: 48840
Опубліковано: 15.08.2002
Автори: Гаврильченко Олександр Віталійович, Ланець Олексій Степанович
МПК: B06B 1/02
Мітки: об'ємної, вібраційна, обробки, машина
Формула / Реферат:
Вібраційна машина об'ємної обробки, що містить симетричну відносно горизонтальної площини реактивну масу, яка віброізолюючими стержнями з'єднана з рамою, симетрично розташовані відносно тієї ж горизонтальної площини першу та другу активні маси, перший та другий колові електромагнітні віброзбудники, першу та другу плоскі пружні системи, перший та другий контейнери, причому перша та друга активні маси з'єднані між собою вертикально розташованим...
Вібраційна машина

Номер патенту: 40893
Опубліковано: 15.08.2001
Автори: Повідайло Володимир Олександрович, Ланець Олексій Степанович, Гаврильченко Олександр Віталійович, Боровець Володимир Михайлович
МПК: B06B 1/02
Мітки: машина, вібраційна
Формула / Реферат:
Вібраційна машина, що містить реактивну і першу активну маси, з'єднані пружним елементом, перший коловий електромагнітний віброзбудник, осердя з котушками якого розташовані в реактивній масі, а якорі в першій активній масі, до якої прикріплений контейнер, яка відрізняється тим, що додатково містить другу активну масу, другий коловий електромагнітний віброзбудник, дві плоскі пружні системи, другий контейнер та раму, причому реактивна маса...
Вібраційна притиральна машина

Номер патенту: 4202
Опубліковано: 17.01.2005
Автори: Гаврильченко Олександр Віталійович, Шпак Ярослав Володимирович, Ланець Олексій Степанович
МПК: B06B 1/02
Мітки: машина, вібраційна, притиральна
Формула / Реферат:
Вібраційна притиральна машина, що містить нижню реактивну та верхню робочу коливні плити, які з'єднані між собою вертикальною пружною торсіонною системою, електромагнітні віброзбудники, осердя з котушками яких прикріплені до реактивної плити, а якорі - до робочої плити, до якої зверху прикріплений притир, на якому по колу встановлені касети з деталями та в центральній частині якого прикріплена електромагнітна муфта періодичної дії, причому...
Вібраційна машина об`ємної обробки
Номер патенту: 22198
Опубліковано: 25.04.2007
Автори: Ланець Олексій Степанович, Шпак Ярослав Володимирович, Гаврильченко Олександр Віталійович
МПК: B06B 1/02
Мітки: вібраційна, об'ємної, машина, обробки
Формула / Реферат:
Вібраційна машина об'ємної обробки, що містить симетричні відносно горизонтальної площини реактивну масу, яка віброізолюючими стержнями з'єднана з рамою, вертикально розташований пружний стержень, кожух, перший коловий електромагнітний віброзбудник, симетрично розташовані відносно тієї ж горизонтальної площини першу та другу активні маси, другий та третій колові електромагнітні віброзбудники, першу та другу плоскі пружні системи, перший та...
Попередній патент: Тест-система для визначення плазміногену в плазмі крові
Наступний патент: Аналого-цифровий електрохімічний пристрій для вимірювання параметрів розчинів
Випадковий патент: Спосіб хіміотерапії хворих на остеогенну саркому