Пристрій для автоматизованого вимірювання контактної різниці потенціалів безконтактним методом
Номер патенту: 104591
Опубліковано: 10.02.2016
Автори: Нагорна Ніна Миколаївна, Жавжаров Євген Лєонідович, Смирнова Ніна Анатоліївна
Формула / Реферат
Пристрій для автоматизованого вимірювання контактної різниці потенціалів безконтактним методом, що містить столик, зразок, еталонний електрод, вібратор, екрануючий корпус, підсилювач, який відрізняється тим, що столик виконано рухливим у координаті X за допомогою першого крокового двигуна та координаті Υ за допомогою другого крокового двигуна, вібратор електромагнітного типу разом із еталонним електродом приводиться у дію вбудованим із ним в один корпус генератором і зв'язаний із керованим третім кроковим двигуном механізмом регулювання відстані Ζ між еталонним електродом і зразком на столику, підсилювач електрично зв'язаний із перетворювачем аналогового сигналу у цифровий і складає з ним перетворювальний блок, який з'єднується із електронним блоком вимірювання та керування та має роз'єм для підключення зовнішнього блока дистанційного керування та ЕОМ.
Текст
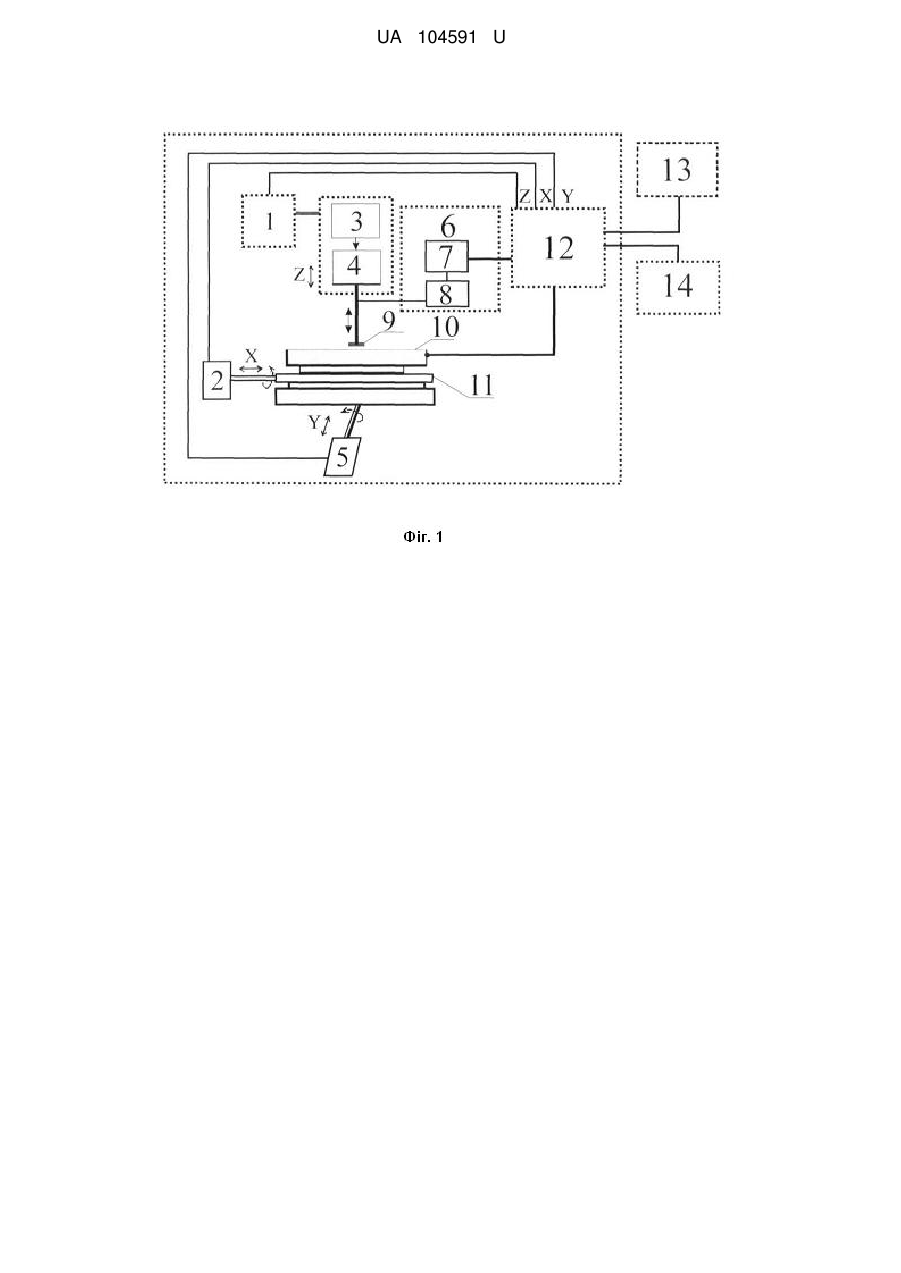
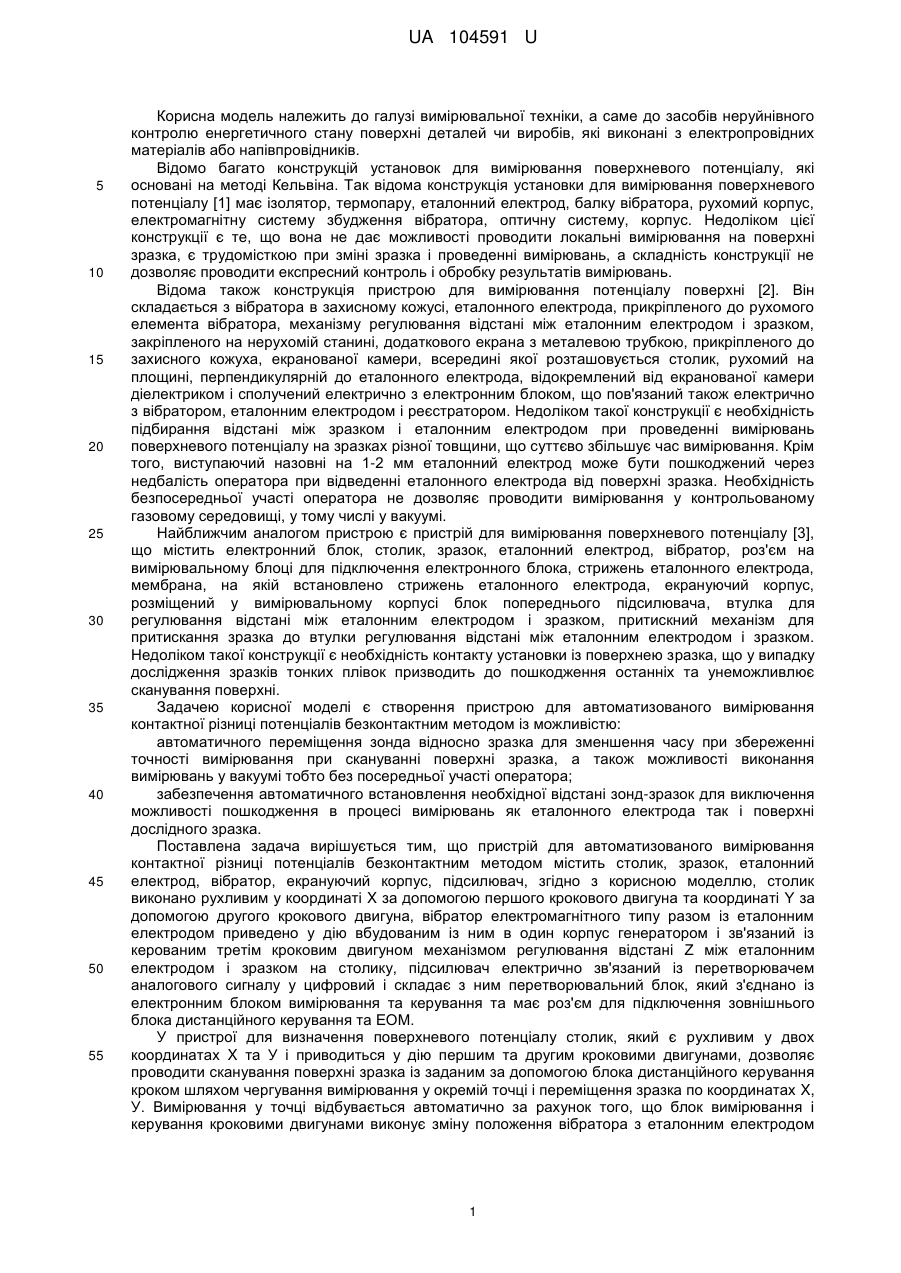
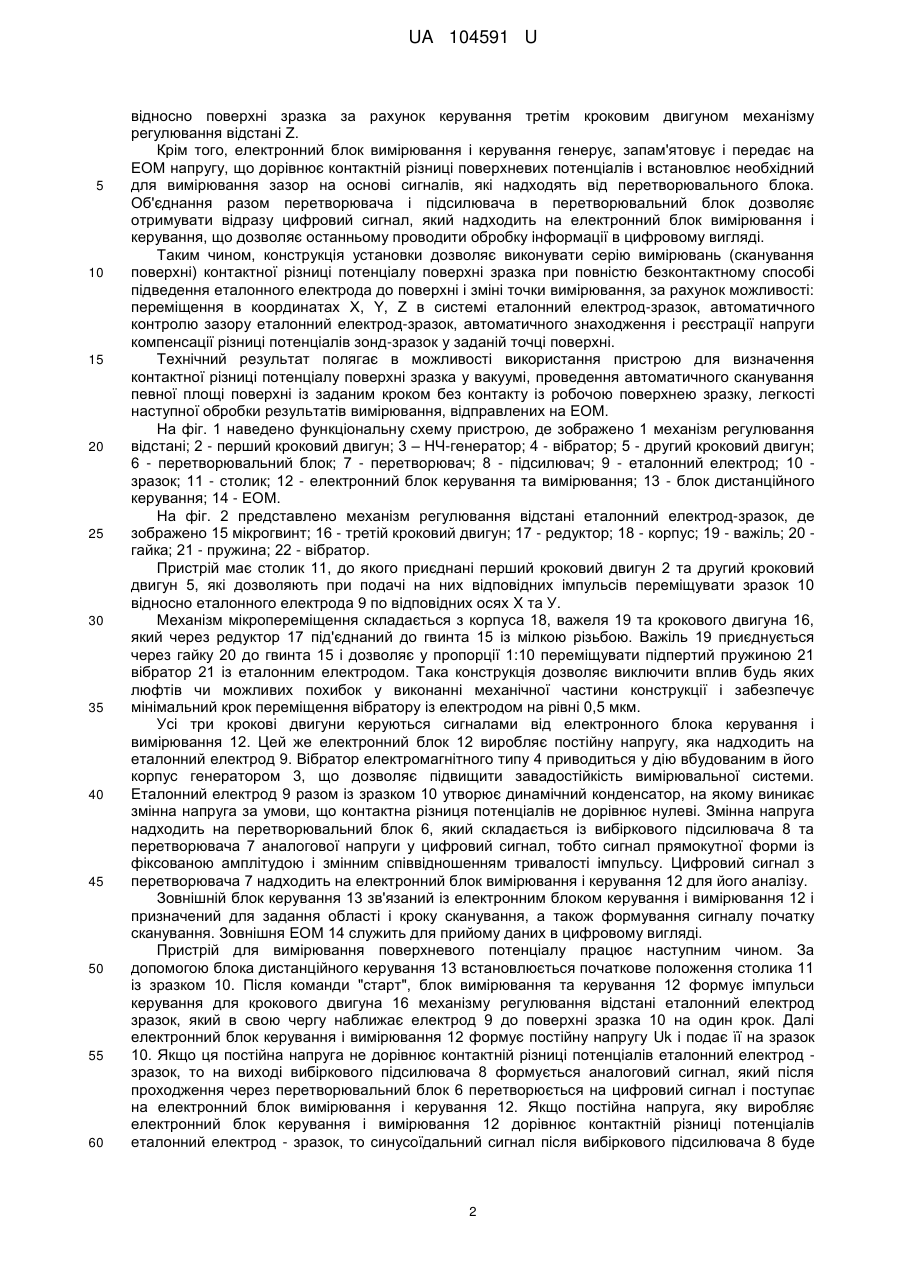
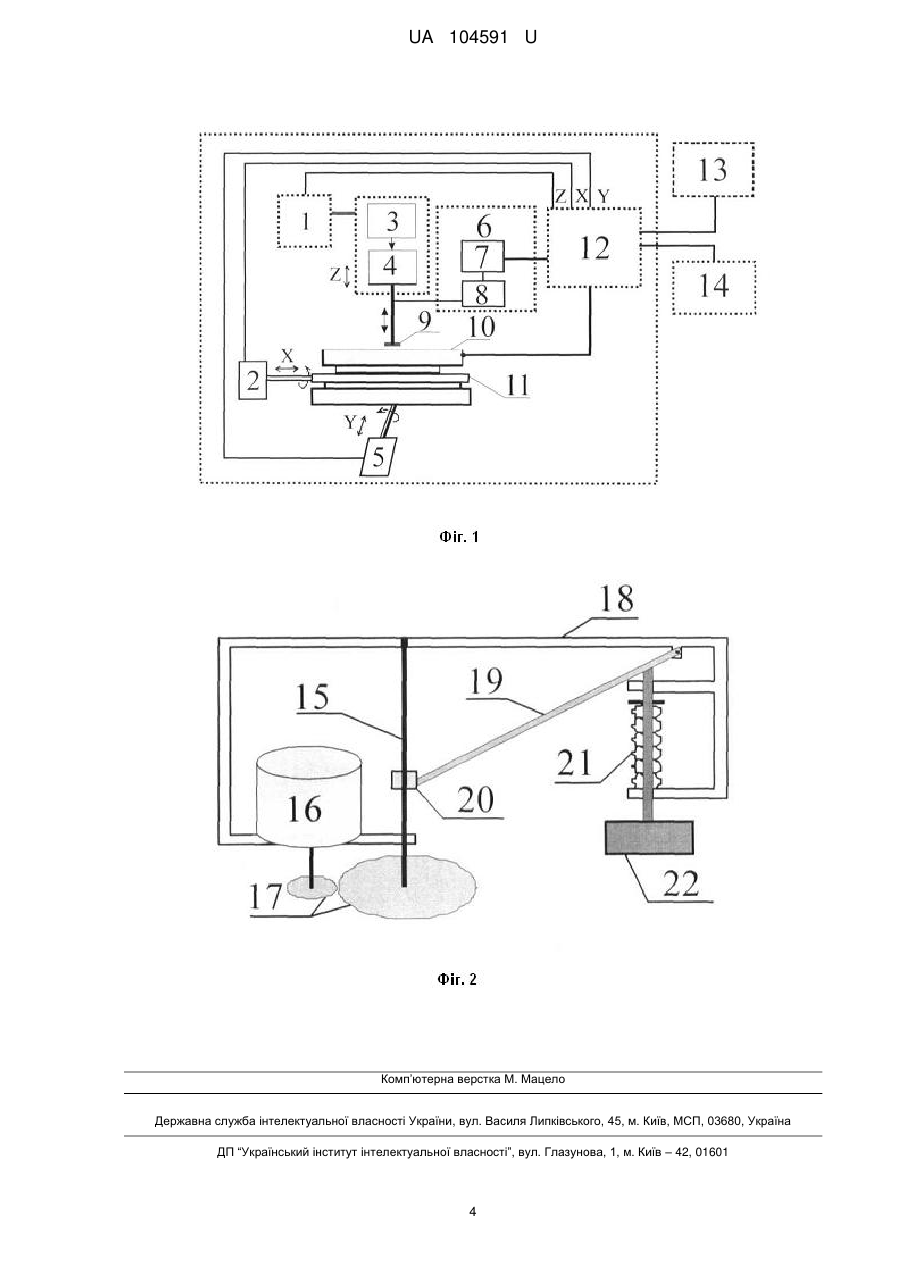
Реферат: Пристрій для автоматизованого вимірювання контактної різниці потенціалів безконтактним методом містить столик, зразок, еталонний електрод, вібратор, екрануючий корпус, підсилювач. Столик виконано рухливим за допомогою першого крокового двигуна за допомогою другого крокового двигуна. Вібратор електромагнітного типу разом із еталонним електродом приведено у дію вбудованим із ним в один корпус генератором і зв'язаний із керованим третім кроковим двигуном механізмом регулювання відстані між еталонним електродом і зразком на столику. Підсилювач електрично зв'язаний із перетворювачем аналогового сигналу у цифровий і складає з ним перетворювальний блок, який з'єднано із електронним блоком вимірювання та керування та має роз'єм для підключення зовнішнього блока дистанційного керування та ЕОМ. UA 104591 U (12) UA 104591 U UA 104591 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі вимірювальної техніки, а саме до засобів неруйнівного контролю енергетичного стану поверхні деталей чи виробів, які виконані з електропровідних матеріалів або напівпровідників. Відомо багато конструкцій установок для вимірювання поверхневого потенціалу, які основані на методі Кельвіна. Так відома конструкція установки для вимірювання поверхневого потенціалу [1] має ізолятор, термопару, еталонний електрод, балку вібратора, рухомий корпус, електромагнітну систему збудження вібратора, оптичну систему, корпус. Недоліком цієї конструкції є те, що вона не дає можливості проводити локальні вимірювання на поверхні зразка, є трудомісткою при зміні зразка і проведенні вимірювань, а складність конструкції не дозволяє проводити експресний контроль і обробку результатів вимірювань. Відома також конструкція пристрою для вимірювання потенціалу поверхні [2]. Він складається з вібратора в захисному кожусі, еталонного електрода, прикріпленого до рухомого елемента вібратора, механізму регулювання відстані між еталонним електродом і зразком, закріпленого на нерухомій станині, додаткового екрана з металевою трубкою, прикріпленого до захисного кожуха, екранованої камери, всередині якої розташовується столик, рухомий на площині, перпендикулярній до еталонного електрода, відокремлений від екранованої камери діелектриком і сполучений електрично з електронним блоком, що пов'язаний також електрично з вібратором, еталонним електродом і реєстратором. Недоліком такої конструкції є необхідність підбирання відстані між зразком і еталонним електродом при проведенні вимірювань поверхневого потенціалу на зразках різної товщини, що суттєво збільшує час вимірювання. Крім того, виступаючий назовні на 1-2 мм еталонний електрод може бути пошкоджений через недбалість оператора при відведенні еталонного електрода від поверхні зразка. Необхідність безпосередньої участі оператора не дозволяє проводити вимірювання у контрольованому газовому середовищі, у тому числі у вакуумі. Найближчим аналогом пристрою є пристрій для вимірювання поверхневого потенціалу [3], що містить електронний блок, столик, зразок, еталонний електрод, вібратор, роз'єм на вимірювальному блоці для підключення електронного блока, стрижень еталонного електрода, мембрана, на якій встановлено стрижень еталонного електрода, екрануючий корпус, розміщений у вимірювальному корпусі блок попереднього підсилювача, втулка для регулювання відстані між еталонним електродом і зразком, притискний механізм для притискання зразка до втулки регулювання відстані між еталонним електродом і зразком. Недоліком такої конструкції є необхідність контакту установки із поверхнею зразка, що у випадку дослідження зразків тонких плівок призводить до пошкодження останніх та унеможливлює сканування поверхні. Задачею корисної моделі є створення пристрою для автоматизованого вимірювання контактної різниці потенціалів безконтактним методом із можливістю: автоматичного переміщення зонда відносно зразка для зменшення часу при збереженні точності вимірювання при скануванні поверхні зразка, а також можливості виконання вимірювань у вакуумі тобто без посередньої участі оператора; забезпечення автоматичного встановлення необхідної відстані зонд-зразок для виключення можливості пошкодження в процесі вимірювань як еталонного електрода так і поверхні дослідного зразка. Поставлена задача вирішується тим, що пристрій для автоматизованого вимірювання контактної різниці потенціалів безконтактним методом містить столик, зразок, еталонний електрод, вібратор, екрануючий корпус, підсилювач, згідно з корисною моделлю, столик виконано рухливим у координаті X за допомогою першого крокового двигуна та координаті Υ за допомогою другого крокового двигуна, вібратор електромагнітного типу разом із еталонним електродом приведено у дію вбудованим із ним в один корпус генератором і зв'язаний із керованим третім кроковим двигуном механізмом регулювання відстані Ζ між еталонним електродом і зразком на столику, підсилювач електрично зв'язаний із перетворювачем аналогового сигналу у цифровий і складає з ним перетворювальний блок, який з'єднано із електронним блоком вимірювання та керування та має роз'єм для підключення зовнішнього блока дистанційного керування та ЕОМ. У пристрої для визначення поверхневого потенціалу столик, який є рухливим у двох координатах X та У і приводиться у дію першим та другим кроковими двигунами, дозволяє проводити сканування поверхні зразка із заданим за допомогою блока дистанційного керування кроком шляхом чергування вимірювання у окремій точці і переміщення зразка по координатах X, У. Вимірювання у точці відбувається автоматично за рахунок того, що блок вимірювання і керування кроковими двигунами виконує зміну положення вібратора з еталонним електродом 1 UA 104591 U 5 10 15 20 25 30 35 40 45 50 55 60 відносно поверхні зразка за рахунок керування третім кроковим двигуном механізму регулювання відстані Ζ. Крім того, електронний блок вимірювання і керування генерує, запам'ятовує і передає на ЕОМ напругу, що дорівнює контактній різниці поверхневих потенціалів і встановлює необхідний для вимірювання зазор на основі сигналів, які надходять від перетворювального блока. Об'єднання разом перетворювача і підсилювача в перетворювальний блок дозволяє отримувати відразу цифровий сигнал, який надходить на електронний блок вимірювання і керування, що дозволяє останньому проводити обробку інформації в цифровому вигляді. Таким чином, конструкція установки дозволяє виконувати серію вимірювань (сканування поверхні) контактної різниці потенціалу поверхні зразка при повністю безконтактному способі підведення еталонного електрода до поверхні і зміні точки вимірювання, за рахунок можливості: переміщення в координатах Χ, Υ, Ζ в системі еталонний електрод-зразок, автоматичного контролю зазору еталонний електрод-зразок, автоматичного знаходження і реєстрації напруги компенсації різниці потенціалів зонд-зразок у заданій точці поверхні. Технічний результат полягає в можливості використання пристрою для визначення контактної різниці потенціалу поверхні зразка у вакуумі, проведення автоматичного сканування певної площі поверхні із заданим кроком без контакту із робочою поверхнею зразку, легкості наступної обробки результатів вимірювання, відправлених на ЕОМ. На фіг. 1 наведено функціональну схему пристрою, де зображено 1 механізм регулювання відстані; 2 - перший кроковий двигун; 3 – НЧ-генератор; 4 - вібратор; 5 - другий кроковий двигун; 6 - перетворювальний блок; 7 - перетворювач; 8 - підсилювач; 9 - еталонний електрод; 10 зразок; 11 - столик; 12 - електронний блок керування та вимірювання; 13 - блок дистанційного керування; 14 - ЕОМ. На фіг. 2 представлено механізм регулювання відстані еталонний електрод-зразок, де зображено 15 мікрогвинт; 16 - третій кроковий двигун; 17 - редуктор; 18 - корпус; 19 - важіль; 20 гайка; 21 - пружина; 22 - вібратор. Пристрій має столик 11, до якого приєднані перший кроковий двигун 2 та другий кроковий двигун 5, які дозволяють при подачі на них відповідних імпульсів переміщувати зразок 10 відносно еталонного електрода 9 по відповідних осях X та У. Механізм мікропереміщення складається з корпуса 18, важеля 19 та крокового двигуна 16, який через редуктор 17 під'єднаний до гвинта 15 із мілкою різьбою. Важіль 19 приєднується через гайку 20 до гвинта 15 і дозволяє у пропорції 1:10 переміщувати підпертий пружиною 21 вібратор 21 із еталонним електродом. Така конструкція дозволяє виключити вплив будь яких люфтів чи можливих похибок у виконанні механічної частини конструкції і забезпечує мінімальний крок переміщення вібратору із електродом на рівні 0,5 мкм. Усі три крокові двигуни керуються сигналами від електронного блока керування і вимірювання 12. Цей же електронний блок 12 виробляє постійну напругу, яка надходить на еталонний електрод 9. Вібратор електромагнітного типу 4 приводиться у дію вбудованим в його корпус генератором 3, що дозволяє підвищити завадостійкість вимірювальної системи. Еталонний електрод 9 разом із зразком 10 утворює динамічний конденсатор, на якому виникає змінна напруга за умови, що контактна різниця потенціалів не дорівнює нулеві. Змінна напруга надходить на перетворювальний блок 6, який складається із вибіркового підсилювача 8 та перетворювача 7 аналогової напруги у цифровий сигнал, тобто сигнал прямокутної форми із фіксованою амплітудою і змінним співвідношенням тривалості імпульсу. Цифровий сигнал з перетворювача 7 надходить на електронний блок вимірювання і керування 12 для його аналізу. Зовнішній блок керування 13 зв'язаний із електронним блоком керування і вимірювання 12 і призначений для задання області і кроку сканування, а також формування сигналу початку сканування. Зовнішня ЕОМ 14 служить для прийому даних в цифровому вигляді. Пристрій для вимірювання поверхневого потенціалу працює наступним чином. За допомогою блока дистанційного керування 13 встановлюється початкове положення столика 11 із зразком 10. Після команди "старт", блок вимірювання та керування 12 формує імпульси керування для крокового двигуна 16 механізму регулювання відстані еталонний електрод зразок, який в свою чергу наближає електрод 9 до поверхні зразка 10 на один крок. Далі електронний блок керування і вимірювання 12 формує постійну напругу Uk і подає її на зразок 10. Якщо ця постійна напруга не дорівнює контактній різниці потенціалів еталонний електрод зразок, то на виході вибіркового підсилювача 8 формується аналоговий сигнал, який після проходження через перетворювальний блок 6 перетворюється на цифровий сигнал і поступає на електронний блок вимірювання і керування 12. Якщо постійна напруга, яку виробляє електронний блок керування і вимірювання 12 дорівнює контактній різниці потенціалів еталонний електрод - зразок, то синусоїдальний сигнал після вибіркового підсилювача 8 буде 2 UA 104591 U 5 10 15 20 25 наближатися до нуля, а цифровий сигнал з блоку перетворення 6 буде дорівнювати нулеві. Електронний блок вимірювання і керування 12 змінюючи напругу на зразку 10 знаходить діапазон напруг, за якого сигнал з вибіркового підсилювача 8 наближається до нуля. Величина діапазону напруг залежить від багатьох чинників, але найбільше від величини зазору зонд зразок. Нове у корисній моделі - це контроль зазору зонд - зразок за величиною діапазону напруги компенсації. Електронний блок вимірювання і керування 12 порівнює виміряне значення діапазону напруги компенсації Uk із заданим у налаштуваннях. Якщо виміряне значення більше заданого, то виконується подальше зменшення зазору еталонний електрод зразок. Якщо виміряне значення діапазону менше, то вимір у цій точці поверхні вважається виконаним, блок вимірювання та керування 12 запам'ятовує значення знайденого діапазону напруг, піднімає зонд 9 над поверхнею зразка 10, після чого здійснює переміщення столика 11 із зразком 10 відносно зонду 9 на заданий крок. Далі процес вимірювання повторюється для наступної точки поверхні. По закінченні сканування заданої площі поверхні дані передаються на персональний комп'ютер 14 для подальшої обробки. Джерела інформації: 1. Устройство для измерения распределения поверхностного потенциала: А. с. 1026088 A. SU. МКИ G 01 R 29/12 /В.Ф. Колесников, А. В. Мажулин. - 3389341/18-21; Заявл. 05.02.81; Опубл. 30.06.83, Бюл. № 24. - 3 с: ил. 2. Булатова Р.Ф., Корниленко А. Н., Павлухин В.Α., Шкалето В.И. Установка для изучения кинетики фото- и термостимулированных измерений поверхностного потенциала полупроводников //ПТЭ. - 1984. - № 1. - С. 192-195. 3. Патент на корисну модель 39395 Україна, МПК G01R 29/12. Пристрій для вимірювання поверхневого потенціалу /Компанієць І.В., Шкілько А.М., Борисов В.В.; власник Українська інженерно-педагогічна академія. - - № U200811428; дата заявки 22.09.2009; дата публік. 25.02.2009, Бюл. № 4. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Пристрій для автоматизованого вимірювання контактної різниці потенціалів безконтактним методом, що містить столик, зразок, еталонний електрод, вібратор, екрануючий корпус, підсилювач, який відрізняється тим, що столик виконано рухливим у координаті X за допомогою першого крокового двигуна та координаті Υ за допомогою другого крокового двигуна, вібратор електромагнітного типу разом із еталонним електродом приводиться у дію вбудованим із ним в один корпус генератором і зв'язаний із керованим третім кроковим двигуном механізмом регулювання відстані Ζ між еталонним електродом і зразком на столику, підсилювач електрично зв'язаний із перетворювачем аналогового сигналу у цифровий і складає з ним перетворювальний блок, який з'єднується із електронним блоком вимірювання та керування та має роз'єм для підключення зовнішнього блока дистанційного керування та ЕОМ. 3 UA 104591 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюZhavzharov Yevhen Leonidovych
Автори російськоюЖавжаров Евгений Леонидович
МПК / Мітки
МПК: G01N 27/87, G01R 29/12
Мітки: автоматизованого, вимірювання, різниці, безконтактним, потенціалів, пристрій, контактної, методом
Код посилання
<a href="https://ua.patents.su/6-104591-pristrijj-dlya-avtomatizovanogo-vimiryuvannya-kontaktno-riznici-potencialiv-bezkontaktnim-metodom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматизованого вимірювання контактної різниці потенціалів безконтактним методом</a>
Пристрій для вимірювання контактної різниці потенціалів
Номер патенту: 51160
Опубліковано: 12.07.2010
Автори: Шкілько Анатолій Максимович, Компанієць Ігор Валерійович, Борисов Валентин Володимирович, Тихоненко Віра Вікторівна
МПК: G01R 29/12
Мітки: контактної, пристрій, різниці, потенціалів, вимірювання
Формула / Реферат:
Пристрій для вимірювання контактної різниці потенціалів, що містить послідовно з'єднані генератор і вібратор, і до рухомої частини якого прикріплений зонд, який підключений через конденсатор з попереднім підсилювачем, який відрізняється тим, що в нього введено внутрішній вольтметр, послідовно з'єднані селективний підсилювач, фазовий детектор, компаратор, блок компенсації напруги, блок живлення схеми збудження, з'єднаний з генератором, блок...
Пристрій для вимірювання поверхневого потенціалу
Номер патенту: 39395
Опубліковано: 25.02.2009
Автори: Борисов Валентин Володимирович, Шкілько Анатолій Максимович, Компанієць Ігор Валерійович
МПК: G01R 29/12
Мітки: потенціалу, вимірювання, поверхневого, пристрій
Формула / Реферат:
Пристрій для вимірювання поверхневого потенціалу, що містить електронний блок, столик, зразок, еталонний електрод, вібратор, введено рознім на вимірювальному блоці для підключення електронного блока, стержень еталонного електрода, мембрану, на якій встановлений стержень еталонного електрода, екрануючий корпус, розміщений у вимірювальному корпусі, блок попереднього підсилювача, втулка для регулювання відстані між еталонним електродом і...
Спосіб автоматизованого вимірювання в`язкості біологічних рідин безелектродним методом
Номер патенту: 35766
Опубліковано: 10.10.2008
Автори: Пішак Василь Павлович, Шаплавський Микола Володимирович, Григоришин Петро Михайлович, Слободян Оксана Всеволодівна
МПК: A61B 5/00
Мітки: безелектродним, спосіб, вимірювання, автоматизованого, рідин, методом, в'язкості, біологічних
Формула / Реферат:
Спосіб автоматизованого вимірювання в'язкості біологічних рідин безелектродним методом шляхом вимірювання параметрів рідини, що рухається через контур певного об'єму, який відрізняється тим, що додатково проводять автоматичну комп'ютерну реєстрацію напруги на виході приладу (вимірювач добротності ВМ-560) та однозначно її переводять у добротність коливального контуру, а вимірювання в'язкості проводять за графічною залежністю коливального...
Пристрій для визначення розміщення та вимірювання потенціалів підземних трубопроводів
Номер патенту: 52293
Опубліковано: 25.08.2010
Автори: Вербенець Богдан Ярославович, Джала Роман Михайлович
МПК: G01V 3/00, C23F 13/00
Мітки: підземних, вимірювання, розміщення, трубопроводів, визначення, потенціалів, пристрій
Формула / Реферат:
Пристрій для визначення розміщення та вимірювання потенціалів підземних трубопроводів, що складається з розміщених у корпусі послідовно з'єднаних індуктивного датчика магнітного поля, вхідного підсилювача, фільтра, логарифмічного підсилювача, випрямляча, індикатора, блока живлення та перемикача діапазонів, з'єднаного з вхідним підсилювачем, та конструктивно суміщеного з вимикачем, з'єднаним з блоком живлення, при цьому з'єднання пристрою...
Компенсаційний спосіб вимірювання різниці тисків та пристрій для його здійснення
Номер патенту: 56384
Опубліковано: 15.05.2003
Автор: Шевченко Сергій Якович
Мітки: тисків, різниці, здійснення, вимірювання, компенсаційний, пристрій, спосіб
Формула / Реферат:
1. Спосіб вимірювання різниці тисків, що полягає в збудженні у камері з вимірювальною мембраною коливань, який відрізняється тим, що вимірювальну мембрану повертають в положення рівноваги шляхом прикладення зовнішньої сили, а про різницю тисків судять по величині цієї сили.2. Спосіб по п.1, який відрізняється тим, що мембрану в положення рівноваги повертають за допомогою електричного поля, а про різницю тисків судять по величині цього...
Попередній патент: Колодкове гальмо
Наступний патент: Спосіб однореакторного паралельного синтезу алкілсульфідів, сульфоксидів та сульфонів
Випадковий патент: Пристрій для моделювання хронічної ішемії