Пристрій захисту від завад
Номер патенту: 105932
Опубліковано: 11.04.2016
Формула / Реферат
Пристрій захисту від завад, що містить послідовно з'єднані двоканальну гостроспрямовану антену, перший канал прийому, суматор, блок формування вагових коефіцієнтів, запам'ятовуючий пристрій і керований підсилювач, другий вхід якого з'єднаний з другим входом блока формування вагових коефіцієнтів, а вихід підключений до другого входу суматора, а також синхронізатор і другий канал прийому, вхід якого під'єднано до другого виходу антени, а вихід суматора є виходом пристрою, який відрізняється тим, що до нього додатково введено формувач управляючого сигналу, вхід якого підключено до синхронізатора, а вихід до управляючого входу запам'ятовуючого пристрою, при цьому другий вхід керованого підсилювача під′єднано до виходу другого каналу прийому.
Текст
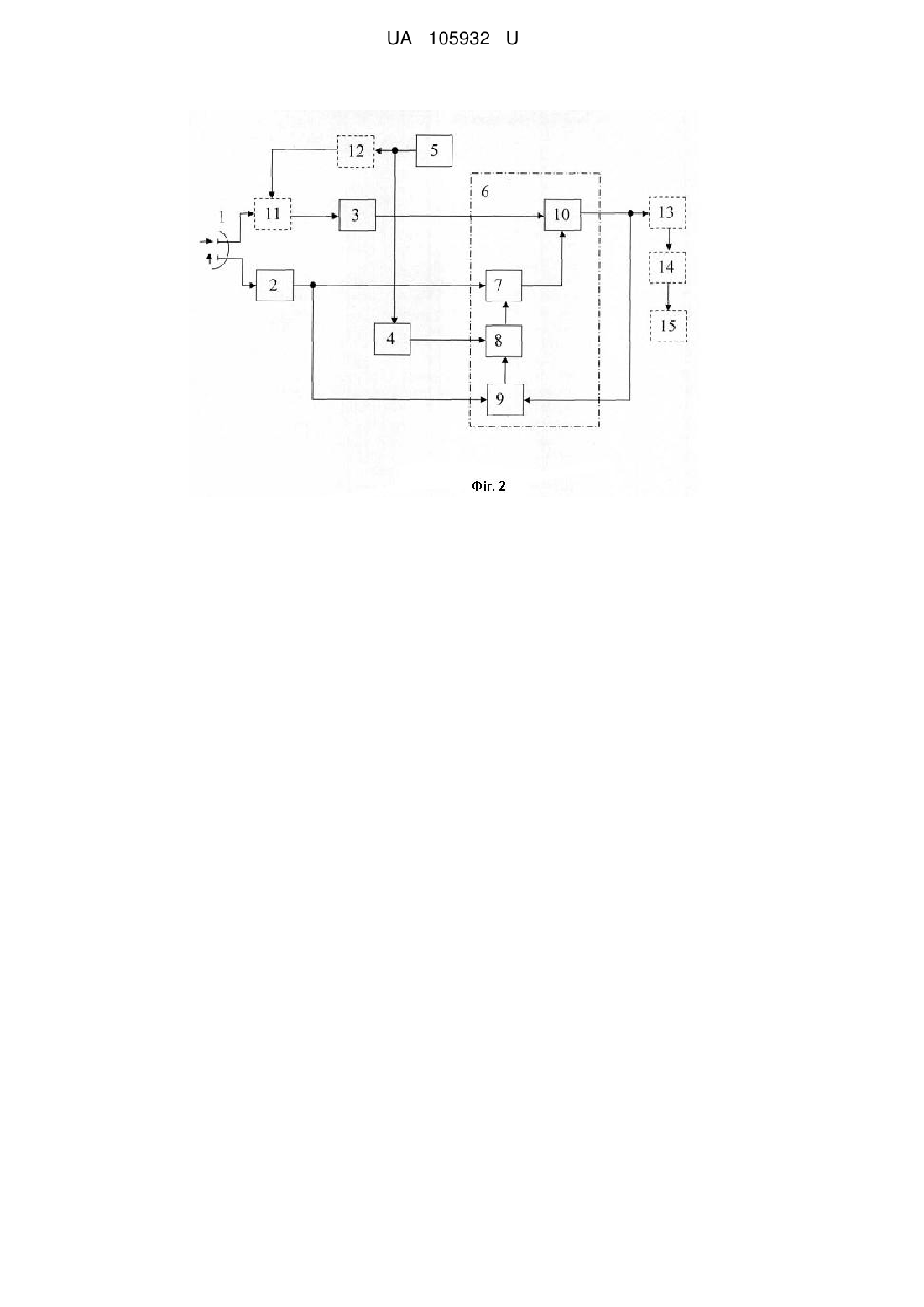
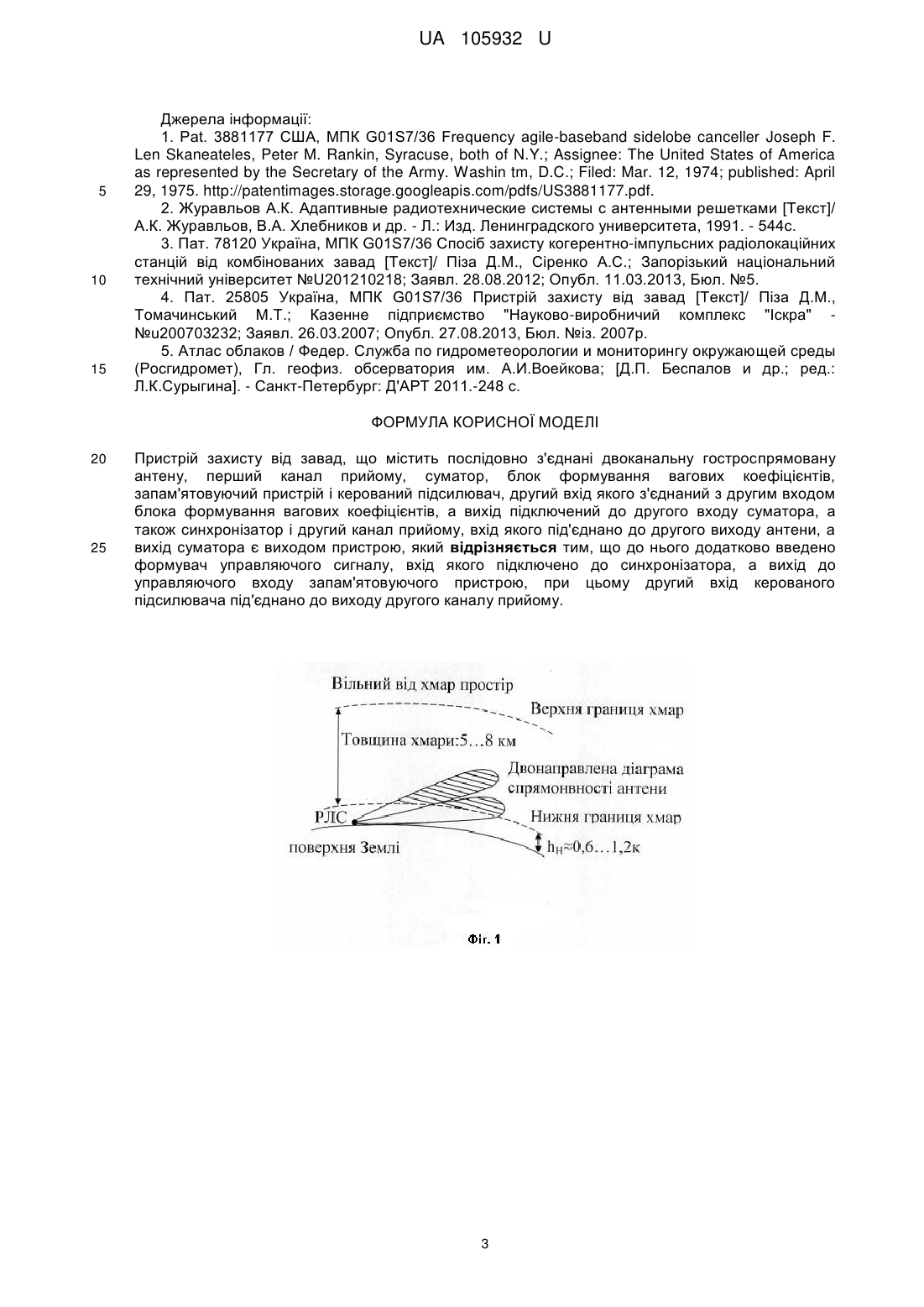
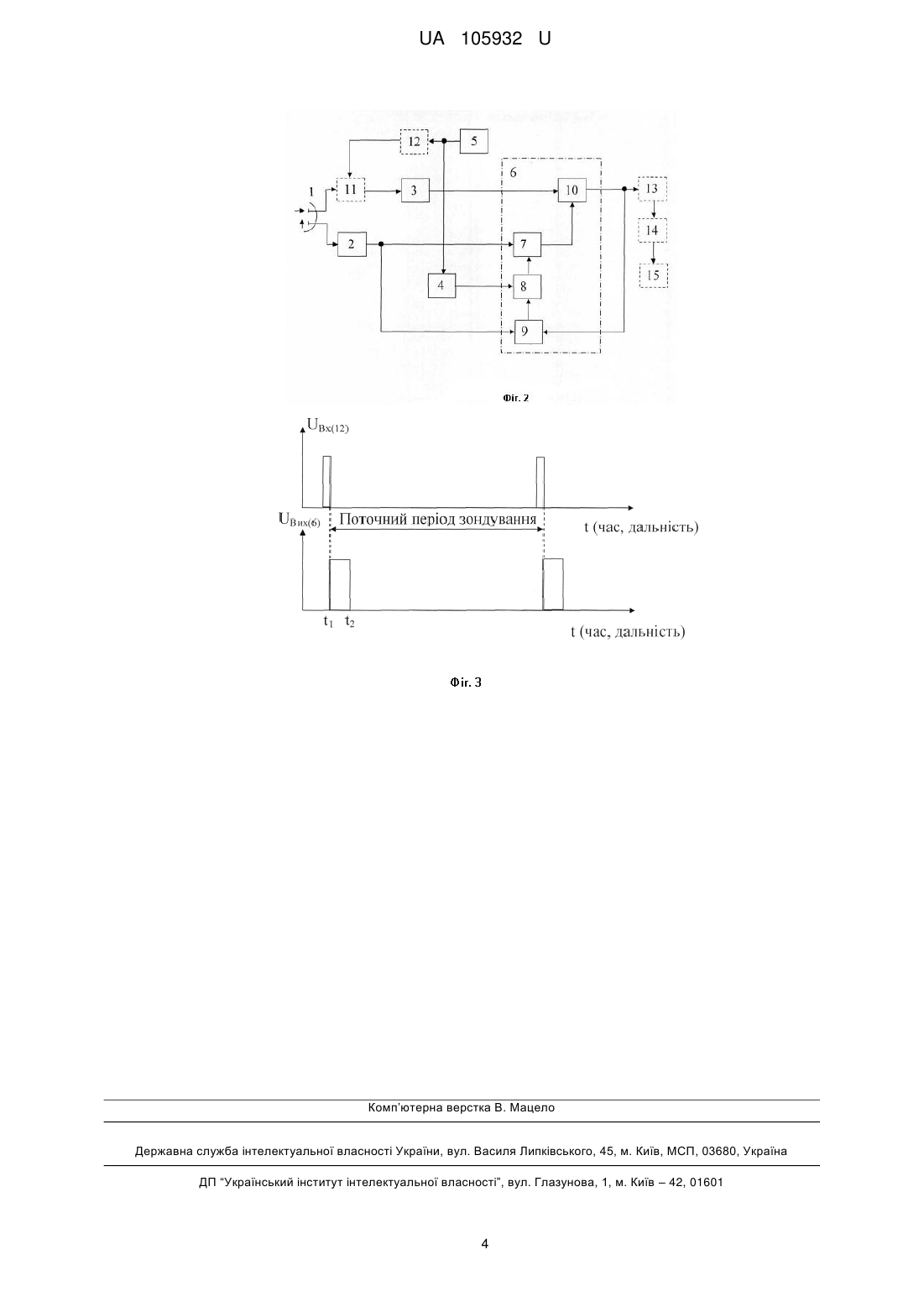
Реферат: Пристрій захисту від завад містить послідовно з'єднані двоканальну гостроспрямовану антену, перший канал прийому, суматор, блок формування вагових коефіцієнтів, запам'ятовуючий пристрій і керований підсилювач, другий вхід якого з'єднаний з другим входом блока формування вагових коефіцієнтів, а вихід підключений до другого входу суматора, а також синхронізатор і другий канал прийому, вхід якого під'єднано до другого виходу антени, а вихід суматора є виходом пристрою. До нього додатково введено формувач управляючого сигналу, вхід якого підключено до синхронізатора, а вихід до управляючого входу запам'ятовуючого пристрою, при цьому другий вхід керованого підсилювача під′єднано до виходу другого каналу прийому. UA 105932 U (12) UA 105932 U UA 105932 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до радіолокації і може бути використана для виявлення низьколетючих цілей, зокрема крилатих ракет, в умовах дії активних шумових та пасивних завад. Відомі радіолокаційні станції (РЛС), у яких системи завадозахисту від активних завад побудовані з використанням безперервних алгоритмів компенсації завад. Прикладом може бути РЛС, структурна схема якої наведена в патенті США [1]. Недоліком таких технічних рішень є низька якість компенсації активних завад при одночасній дії пасивних завад. При значному перевищенні пасивної завади над активною компенсацією останньої стає неможливою. Це пояснюється тим, що просторово-розподілений характер пасивних віддзеркалень порушує часову кореляцію активних випромінювачів[2]. Відома також радіолокаційна система з дискретним алгоритмом компенсації активних завад, структурна схема якої наведена в [3], до складу якої входить дуальнополяризована двоканальна система, основний та компенсаційний канали прийому, корелятор, цифрова лінія затримки, пристрій вибору максимуму, лічильник імпульсів з пам'яттю, автокомпенсатор у складі: керованого підсилювача, запам'ятовуючого пристрою, формувача вагових коефіцієнтів та суматора; а також пристрій фазової фільтрації, виявляч сигналів та монітор. Недоліком такого технічного рішення при виявленні низьколетючих цілей є великий обсяг обладнання при незадовільній якості компенсації активної складової комбінованої завади, що визначається наявністю пасивної завади на більшій частині дальності дії РЛС. Найбільш близьким за суттю та результатом є відомий пристрій захисту від завад [4], що містить послідовно з'єднані гостроспрямовану антену, перший канал прийому, суматор, блок формування вагових коефіцієнтів, запам'ятовуючий пристрій і керований підсилювач, другий вхід якого з'єднаний з другим входом блока формування вагових коефіцієнтів, а вихід підключений до другого входу суматора, а також синхронізатор, при цьому другий канал прийому з'єднаний з другим виходом антени. Формування вагових коефіцієнтів, а, відповідно, і адаптація параметрів наведеного пристрою захисту від завад здійснюється дискретно наприкінці дистанції (періоду повторення зондуючого імпульсу), щоб зменшити вплив пасивної завади на компенсацію активної складової комбінованої завади. Але це має сенс для виявлення радіолокаційних об'єктів на великих висотах, коли радіолокатор приймає сигнали від об'єктів, які знаходяться за межами (вище) хмарних систем. Однак, за рахунок збільшення імпульсного об'єму зі збільшенням дальності інтенсивність пасивної завади в кінці дальності при локації низьколетючих об'єктів може бути досить великою. Таким чином, основним недоліком описаного пристрою захисту від завад є низька ефективність компенсації активної складової комбінованої завади при локації низьколетючих об'єктів, що обумовлено впливом пасивної завади. Особливістю виявлення низьколетючих цілей є відносно мала дальність дії радіолокаційних засобів, яка визначається радіогоризонтом. При цьому враховуючи, наприклад, висоту нижньої границі кучно-дощових хмар типу Сb, яка складає 0,6-1,2 км, та їх товщину – 5-8 км [5] можна вважати (див. фіг. 1), що майже вся дальність дії РЛС для виявлення низьколетючих цілей знаходиться під дією віддзеркалень від хмар. Це показано на фіг. 1 заштрихованою частиною об'єму хмари типу Сb, яка віддзеркалює зондуючі сигнали в напрямі на РЛС. З фіг. 1 також видно, що на малих дальностях до РЛС віддзеркалення від хмар відсутні. Оскільки висота h H нижньої границі хмар складає 0,6 км, а кут місця β для виявлення низьколетючих цілей складає 2-3°, то похила дальність R до нижньої границі хмар може бути оцінена як: h 0,6км R 17км, sin sin 2 що відповідає часовому інтервалу, який дорівнює 110мкс. Довжина такого часового інтервалу може на порядок перевищувати інтервал, необхідний для формування вагових коефіцієнтів автокомпенсатора завад. Таким чином, розрахунки показують, що для підвищення ефективності компенсації активної складової комбінованої завади в РЛС виявлення низьколетючих об'єктів вагові коефіцієнти автокомпенсатора необхідно формувати на початку періоду повторення зондуючого імпульсу. В основу корисної моделі поставлена задача розробки пристрою захисту від завад, який забезпечує більш високу ефективність компенсації активної складової комбінованої завади при локації низьколетючих об'єктів. Поставлена задача вирішується тим, що в пристрій захисту від завад, що містить послідовно з'єднані двоканальну гостроспрямовану антену, перший канал прийому, суматор, блок формування вагових коефіцієнтів, запам'ятовуючий пристрій і керований підсилювач, другий вхід якого з'єднаний з другим входом блока формування вагових коефіцієнтів, а вихід 1 UA 105932 U 5 10 15 20 25 30 35 40 45 50 55 60 підключений до другого входу суматора, а також синхронізатор, при цьому вхід другого каналу прийому під'єднано до другого виходу антени, а вихід суматора є виходом пристрою, додатково введено формувач управляючого сигналу, вхід якого підключено до синхронізатра, а вихід до управляючого входу запам'ятовуючого пристрою, при цьому другий вхід керованого підсилювача підєднано до виходу другого каналу прийому. Причинно-наслідковий зв'язок між сукупністю ознак винаходу і технічним результатом полягає в такому. Завдяки тому, що в пристрій додатково введено формувач управляючого сигналу, вхід якого підключено до синхронізатора, а вихід - до управляючого входу запам'ятовуючого пристрою, формування вагових коефіцієнтів автокомпенсатора завад виконується на початку періоду повторення імпульсів. Тобто безпосередньо після випромінювання зондуючого імпульсу на інтервалі часу між моментом випромінювання та моментом досягнення імпульсом нижньої границі хмарних систем. Формування вагових коефіцієнтів на цьому інтервалі, де пасивні завади відсутні, забезпечує ефективну компенсацію активної завади в РЛС виявлення низьколетючих цілей. Нові технічні ознаки при взаємодії з відомими дають новий технічний результат, що дозволяє вирішити поставлену задачу. Це забезпечує усій заявленій сукупності ознак відповідність критерію "новизна" та приводить до нових технічних результатів. Ознаки, що відрізняють технічне рішення, яке заявляється, від прототипу, не виявлені в інших технічних рішеннях при вивченні цієї галузі техніки. Суть корисної моделі пояснюється кресленнями. На фіг. 1 показано вплив хмар типу Сb на РЛС з двопроменевою діаграмою спрямованості антени. На фіг.2 представлена структурна схема завадозахищеної РЛС виявлення низьколетючих цілей, до якої входить пристрій захисту від завад. На фіг.3 наведені часові діаграми роботи РЛС. Запропонований пристрій захисту від завад (див. фіг.2) містить двоканальну дуальнополяризовану гостроспрямовану антену 1, другий канал прийому 2, перший канал прийому 3, формувач управляючого сигналу 4, синхронізатор 5, автокомпенсатор 6, керований підсилювач 7, запам'ятовуючий пристрій 8, блок формування вагових коефіцієнтів 9, суматор 10. Для пояснення роботи пристрою захисту від завад в структурну схему РЛС також введено перемикач прийом/передача 11, передавач 12 та послідовно з'єднані пристрій фазової фільтрації 13, виявляч сигналів 14 та монітор 15, які зображені пунктирною лінією. Крім того, для більш детального пояснення роботи пристрою захисту від завад штрих-пунктирною лінією показано, що керований підсилювач 7, запам'ятовуючий пристрій 8, блок формування вагових коефіцієнтів 9 та суматор 10 входять до складу автокомпенсатора завад 6. Розглянемо роботу пристрою захисту від завад. В режимі передачі перемикач прийом/передача 11 підключає антену 1 до передавача 12. По імпульсу запуска Uвх(12) (див. фіг.2), який надходить з синхронізатора 5, передавач 12 генерує зондуючий імпульс, який через перемикач прийом/передача 11 надходить до антени 1 і випромінюється у простір. По задньому фронту імпульсу запуску U вх(12) при завершенні зондуючого сигналу формувач управляючого сигналу 4 переводить запам'ятовуючий пристрій 8 в режим лінійної передачі сигналів. По завершенні зондуючого імпульсу перемикач прийом/передача підключає антену 1 до першого каналу прийому 3. При цьому прийняті антеною 1 завадові сигнали через перший 3 та другий 2 канали прийому надходять на входи автокомпенсатора завад 6. У блоці формування вагових коефіцієнтів 9 під впливом завадових сигналів формуються вагові коефіцієнти, які через запам'ятовуючий пристрій 8 надходять на керований підсилювач 7. У керованому підсилювачі 7 відбувається регулювання аргументу і модуля коефіцієнта передачі таким чином, щоб завадові сигнали на вході суматора 10 мали однакові амплітуди і були в протифазі. При цьому формування вагових коефіцієнтів виконується дискретно на початку періоду повторення зондуючих імпульсів (див. фіг.3, інтервал t1, t2). Решту періоду повторення зондуючих імпульсів автокомпенсатор завад 6 працює з фіксованими значеннями вагових коефіцієнтів. Завдяки цьому знижується заважаюча дія пасивних завад на процес самонастроювання параметрів автокомпенсатора, що забезпечує високу завадозахищеність РЛС в умовах дії активних завад. Після компенсації активних завад суміш корисних сигналів та пасивних завад надходить на пристрій фазової фільтрації 13, який забезпечує спектральне розмежування корисних сигналів та пасивних завад. У пристрої виявлення 14 в кожному фільтровому каналі пристрою фазової фільтрації 13 виконується виділення на фоні пасивних завад корисних сигналів, які відображаються на моніторі 15. 2 UA 105932 U 5 10 15 Джерела інформації: 1. Pat. 3881177 США, МПК G01S7/36 Frequency agile-baseband sidelobe canceller Joseph F. Len Skaneateles, Peter M. Rankin, Syracuse, both of N.Y.; Assignee: The United States of America as represented by the Secretary of the Army. Washin tm, D.C.; Filed: Mar. 12, 1974; published: April 29, 1975. http://patentimages.storage.googleapis.com/pdfs/US3881177.pdf. 2. Журавльов А.К. Адаптивные радиотехнические системы с антенными решетками [Текст]/ А.К. Журавльов, В.А. Хлебников и др. - Л.: Изд. Ленинградского университета, 1991. - 544с. 3. Пат. 78120 Україна, МПК G01S7/36 Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад [Текст]/ Піза Д.М., Сіренко А.С.; Запорізький національний технічний університет №U201210218; Заявл. 28.08.2012; Опубл. 11.03.2013, Бюл. №5. 4. Пат. 25805 Україна, МПК G01S7/36 Пристрій захисту від завад [Текст]/ Піза Д.М., Томачинський М.Т.; Казенне підприємство "Науково-виробничий комплекс "Іскра" №u200703232; Заявл. 26.03.2007; Опубл. 27.08.2013, Бюл. №із. 2007р. 5. Атлас облаков / Федер. Служба по гидрометеорологии и мониторингу окружающей среды (Росгидромет), Гл. геофиз. обсерватория им. А.И.Воейкова; [Д.П. Беспалов и др.; ред.: Л.К.Сурыгина]. - Санкт-Петербург: Д'АРТ 2011.-248 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Пристрій захисту від завад, що містить послідовно з'єднані двоканальну гостроспрямовану антену, перший канал прийому, суматор, блок формування вагових коефіцієнтів, запам'ятовуючий пристрій і керований підсилювач, другий вхід якого з'єднаний з другим входом блока формування вагових коефіцієнтів, а вихід підключений до другого входу суматора, а також синхронізатор і другий канал прийому, вхід якого під'єднано до другого виходу антени, а вихід суматора є виходом пристрою, який відрізняється тим, що до нього додатково введено формувач управляючого сигналу, вхід якого підключено до синхронізатора, а вихід до управляючого входу запам'ятовуючого пристрою, при цьому другий вхід керованого підсилювача під′єднано до виходу другого каналу прийому. 3 UA 105932 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюAntijamming device
Автори англійськоюPiza Dmytro Makarovych, Sirenko Andrii Serhiiovych
Назва патенту російськоюУстройство защиты от помех
Автори російськоюПиза Дмитрий Макарович, Сиренко Андрей Сергеевич
МПК / Мітки
МПК: H04B 15/00, G01S 7/36
Мітки: пристрій, завад, захисту
Код посилання
<a href="https://ua.patents.su/6-105932-pristrijj-zakhistu-vid-zavad.html" target="_blank" rel="follow" title="База патентів України">Пристрій захисту від завад</a>
Пристрій для захисту від активних завад
Номер патенту: 19475
Опубліковано: 15.12.2006
Автори: Громаковський Володимир Васильович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Піза Дмитро Макарович
МПК: G01S 1/00
Мітки: активних, пристрій, захисту, завад
Формула / Реферат:
Пристрій для захисту від активних завад, що містить гостронаправлену антену, допоміжну ненаправлену антену, основний і компенсаційний канали прийому, блок автокомпенсатора, перший вхід якого з'єднаний з виходом приймача основного каналу прийому, другий вхід автокомпенсатора з'єднаний через підсилювальний блок з виходом приймача компенсаційного каналу прийому, який відрізняється тим, що в каналах прийому введені блок нормування вхідного...
Пристрій захисту від завад
Номер патенту: 25805
Опубліковано: 27.08.2007
Автори: Піза Дмитро Макарович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ
МПК: G01S 7/36
Мітки: захисту, пристрій, завад
Формула / Реферат:
Пристрій захисту від завад, що містить послідовно з'єднані двоканальну гостроспрямовану антену, перший канал прийому, перший суматор, блок формування вагових коефіцієнтів, запам'ятовуючий пристрій і керований підсилювач, другий вхід якого з'єднаний з другим входом блока формування вагових коефіцієнтів, а вихід підключений до другого входу першого суматора, вихід якого є виходом пристрою, а також синхронізатор, підключений до другого входу...
Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад
Номер патенту: 59472
Опубліковано: 10.05.2011
Автори: Рудик Олександр Володимирович, Залевський Олексій Павлович, Піза Дмитро Макарович
МПК: H04B 15/00, G01S 7/36
Мітки: захисту, спосіб, завад, станції, когерентно-імпульсної, радіолокаційної, комбінованих
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагових коефіцієнтів поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та...
Система захисту від завад
Номер патенту: 20787
Опубліковано: 15.02.2007
Автори: ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Піза Дмитро Макарович, Траілін Вячеслав Федорович
МПК: G01S 13/52, G01S 7/36
Мітки: завад, захисту, система
Формула / Реферат:
Система захисту від завад, що містить основний і допоміжний канали прийому, блок селекції рухомих цілей (СРЦ) і автокомпенсатор, що містить перший фазообертач, два балансних підсилювачі, віднімач і корелятор зворотного зв'язку (КЗЗ), що містить другий фазообертач, два балансних помножувачі і чотири фільтри нижніх частот (ФНЧ), при цьому вхід першого фазообертача і першого балансного підсилювача з'єднані з виходом допоміжного каналу прийому,...
Пристрій адаптивної компенсації активних шумових завад
Номер патенту: 69127
Опубліковано: 16.08.2004
Автор: Головань Артур Вячеславович
МПК: G01S 7/36
Мітки: шумових, адаптивної, компенсації, активних, завад, пристрій
Формула / Реферат:
Пристрій адаптивної компенсації активних шумових завад, що включає антенну систему, яка містить 2N антенних елементів з взаємно ортогональною поляризацією, два канали, один з яких зв'язаний з антенними елементами вертикальної поляризації, а другий - з елементами горизонтальної поляризації, канали розділені на N підканалів, кожний з яких містить ваговий підсилювач, вхід якого підключений до виходу антенного елементу і до входу корелятора, а...
Попередній патент: Спосіб моделювання розлитого жовчного перитоніту
Наступний патент: Спосіб підвищення ефективності системи рекуперації енергії транспортного засобу з електричним приводом
Випадковий патент: Спосіб передпосівної обробки насіння сільськогосподарських рослин