Спосіб стабілізації швидкості вертикального вібротранспортування в адаптивних вібраційних технологічних машинах
Номер патенту: 106526
Опубліковано: 10.09.2014
Формула / Реферат
Спосіб стабілізації швидкості вертикального вібротранспортування в адаптивних спіралеподібних вібраційних технологічних машинах, за яким за допомогою системи керування віброприводом, яка відслідковує власну частоту коливань механічної коливної системи ![]() , підтримують режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини за допомогою системи керування контролюють два параметри - частоту
, підтримують режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини за допомогою системи керування контролюють два параметри - частоту ![]() та амплітуду
та амплітуду ![]() коливань робочого органа і у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини за допомогою системи керування коректують частоту та амплітуду вимушених коливань віброприводу робочого органа, до частоти
коливань робочого органа і у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини за допомогою системи керування коректують частоту та амплітуду вимушених коливань віброприводу робочого органа, до частоти ![]() , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа, який відрізняється тим, що амплітуду коливань робочого органа
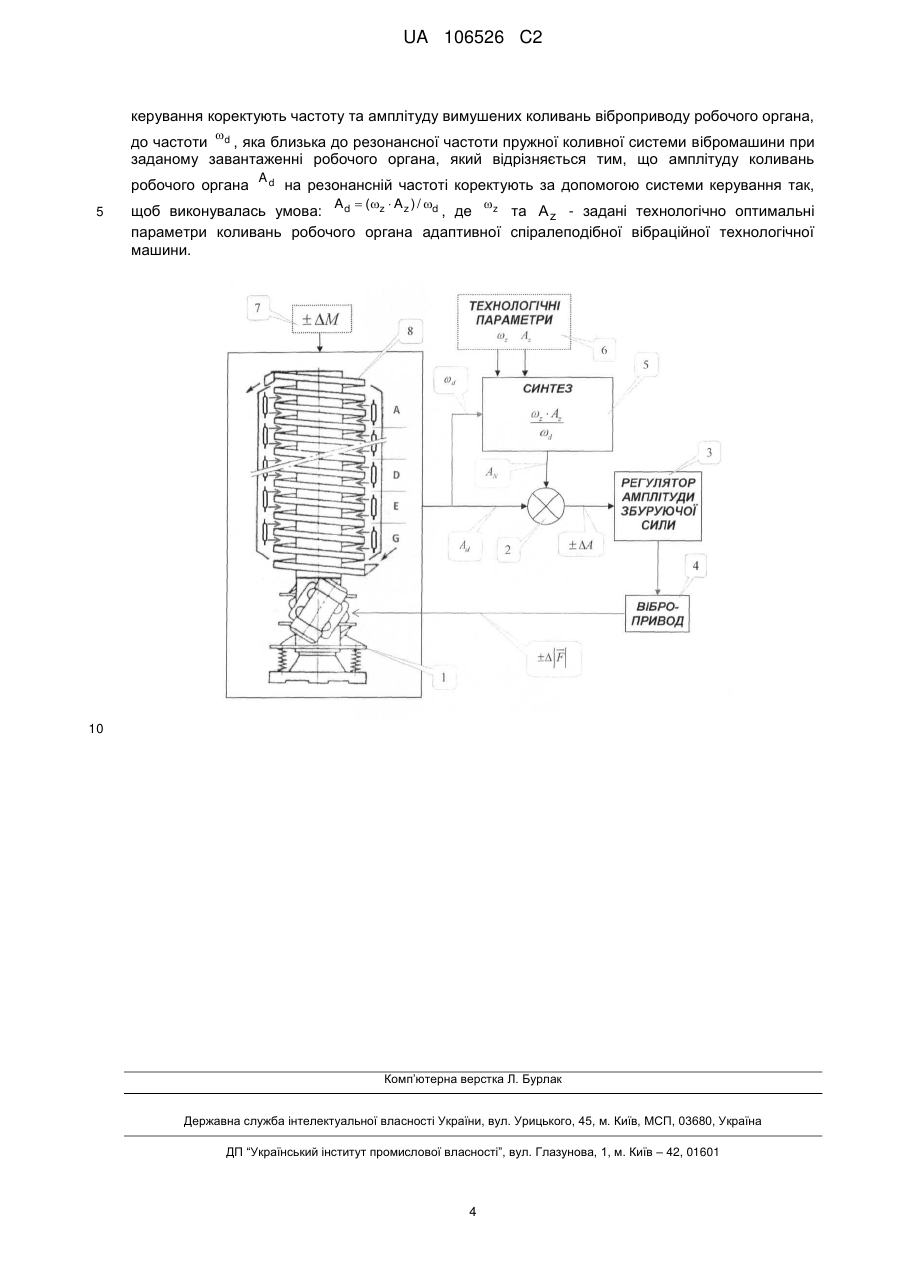
, яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа, який відрізняється тим, що амплітуду коливань робочого органа ![]() на резонансній частоті коректують за допомогою системи керування так, щоб виконувалась умова:
на резонансній частоті коректують за допомогою системи керування так, щоб виконувалась умова: ![]() , де
, де ![]() та
та ![]() задані технологічно оптимальні параметри коливань робочого органа адаптивної спіралеподібної вібраційної технологічної машини.
задані технологічно оптимальні параметри коливань робочого органа адаптивної спіралеподібної вібраційної технологічної машини.
Текст
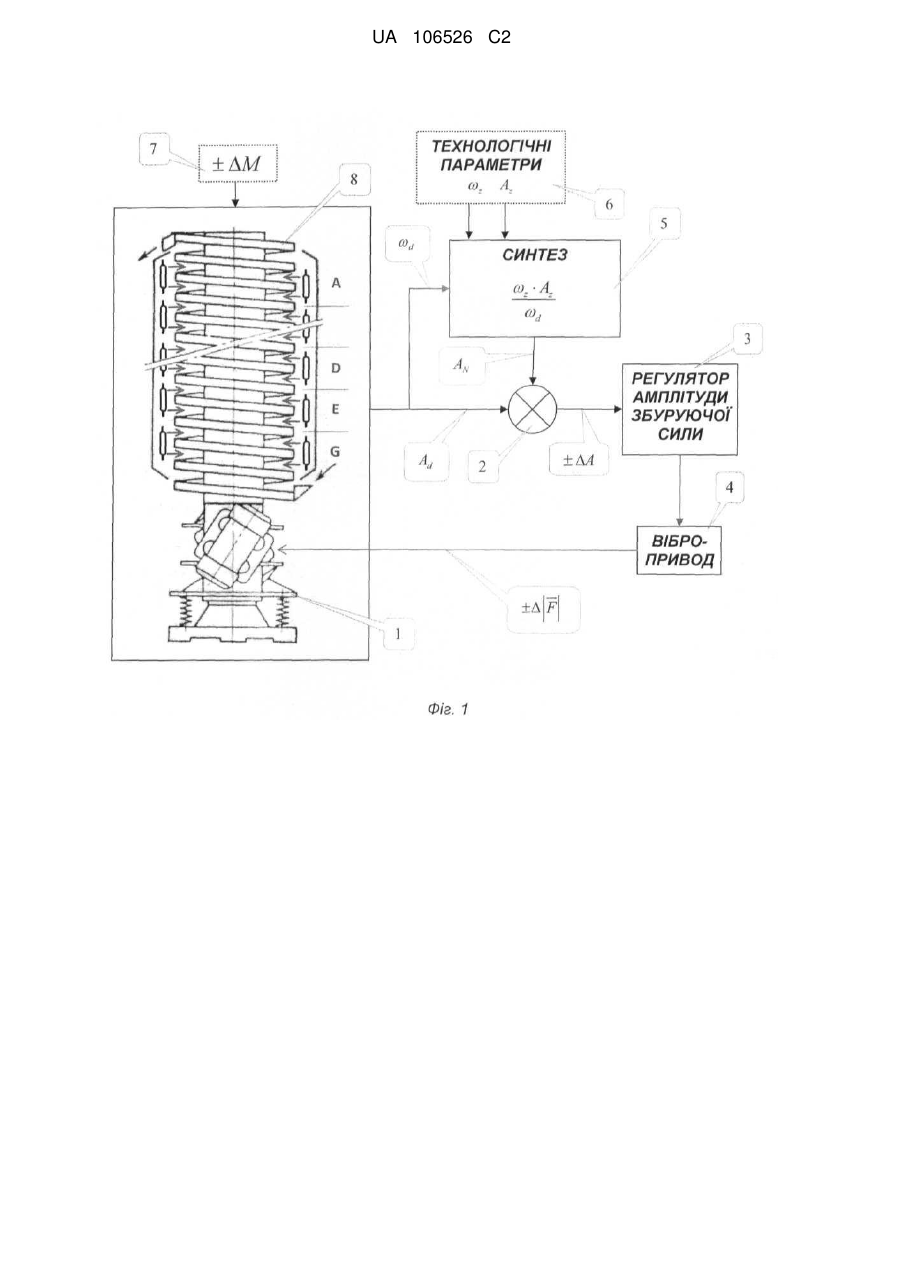
Реферат: Винахід належить до галузі машинобудування та приладобудування, а також гірничопереробної, хімічної, харчової, будівельної промисловості та сільськогосподарського виробництва. Спосіб керування віброприводом, у якому система керування, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри - частоту d та амплітуду A d коливань робочого органа, і у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує частоту та амплітуду вимушених коливань віброприводу робочого органа, до частоти d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа, згідно винаходу, система керування коректує амплітуду коливань робочого органа A d на резонансній частоті так, щоб виконувалась умова: A d (z A z ) / d , де z та A z , задані технологічно оптимальні параметри коливань робочого органа адаптивної спіралеподібної вібраційної технологічної машини. Винахід дозволяє підвищити точність дотримання технологічних режимів роботи адаптивних спіралеподібних вібраційних технологічних машин внаслідок забезпечення постійності швидкості вертикального вібротранспортування оброблюваного сипучого матеріалу. UA 106526 C2 (12) UA 106526 C2 UA 106526 C2 5 10 15 20 25 30 35 40 45 Винахід стосується вібраційної техніки і може знайти застосування в машинобудуванні та приладобудуванні, а також в гірничо-переробній, хімічній, харчовій, будівельній промисловості та сільськогосподарському виробництві. Відомий спосіб керування [1], в якому в процесі роботи адаптивної вібраційної технологічної машини (АВТМ) система керування контролює два параметри - частоту та амплітуду коливань робочого органа, і у випадку зміни завантаження робочого органа або при необхідності зміни режиму роботи машини система керування коректує частоту та амплітуду вимушуючих коливань приводу робочого органа, до частоти, яка близька до резонансної частоти пружної системи вібромашини при заданому завантаженні робочого органа, і амплітуду коливань на резонансній частоті так, що б вона відповідала оптимальному режиму технологічного процесу. Недоліком такого способу стабілізації технологічних параметрів вібраційного поля АВТМ є те, що один і той же рівень амплітуди коливань робочого органа АВТМ на різних частотах призведе до різної інтенсивності технологічного процесу, що для певних технологічних процесів є недопустимим. Найбільш близьким до заявлюваного за технічною суттю є спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин (АВТМ) [2], в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри - частоту d та амплітуду A d коливань робочого органа, і у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує частоту та амплітуду вимушуючих коливань віброприводу робочого органа, до частоти d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа, і амплітуду коливань робочого органа A d на резонансній частоті 2 A 2 Ad z z 2 d , де z та A z задані технологічно оптимальні так, щоб виконувалась умова параметри вібраційного поля адаптивної вібраційної технологічної машини. Недоліком такого способу стабілізації технологічних параметрів вібраційного поля АВТМ є те, що застосування питомої роботи вібраційного поля є адекватним та експериментально доведеним критерієм в роботах [3, 4, 5] для якісної та кількісної оцінки лише технологічних процесів, що пов'язані із віброабразивною обробкою деталей і не може використовуватись для АВТМ, у яких в процесі роботи здійснюється вертикальне вібротранспортування оброблюваного сипучого матеріалу. В основу винаходу поставлено задачу, шляхом зміни залежності амплітуди коливань робочого органа АВТМ від частоти коливань, забезпечити підвищення точності дотримання технологічних режимів роботи адаптивних вібраційних технологічних машин, у яких в процесі роботи здійснюється вертикальне вібротранспортування оброблюваного сипучого матеріалу. Поставлена задача досягається тим, що у способі стабілізації швидкості вертикального вібротранспортування оброблюваного сипучого матеріалу в адаптивних спіралеподібних вібраційних технологічних машинах (АСВТМ), в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи АСВТМ, близький до резонансного, і в процесі її роботи система керування контролює два параметри - частоту d та амплітуду A d коливань робочого органа, і у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи АСВТМ система керування коректує частоту та амплітуду вимушуючих коливань віброприводу робочого органа, до частоти d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа, і амплітуду коливань робочого органа A d на резонансній частоті так, щоб згідно винаходу, виконувалась умова Ad (z A z ) / d , де z та A z задані технологічно оптимальні параметри коливань робочого органа АСВТМ. 50 Такий спосіб стабілізації швидкості вертикального вібротранспортування оброблюваного сипучого матеріалу в адаптивних спіралеподібних вібраційних технологічних машинах базується на забезпечені рівності (стабільності) в часі середньої швидкості 1 UA 106526 C2 5 10 15 20 25 30 35 V вібротранспортування сер [6] (1) при будь-якому завантаженні робочого органа на робочій (власній резонансній) частоті адаптивної спіралеподібної вібромашини: Vсер k A z z cos() , (1) де k - довідковий коефіцієнт, що залежить від характеристик транспортованого матеріалу, - кут підйому гвинтової лінії спіралеподібного робочого органа. Даний спосіб дозволяє постійно підтримувати резонансний режим роботи АСВТМ завдяки корекції d , а при резонансній частоті коливної механічної системи АСВТМ проводиться стабілізація швидкості вертикального вібротранспортування оброблюваного сипучого матеріалу шляхом корекції амплітуди коливань спіралеподібного робочого органа A d , що забезпечує мінімальні енергозатрати на вібропривод при незмінному оптимальному значенні технологічних параметрів АВТМ. На фіг. 1 зображено функціональну схему способу стабілізації швидкості вертикального вібротранспортування оброблюваного сипучого матеріалу в адаптивних спіралеподібних вібраційних технологічних машинах. На резонансну адаптивну спіралеподібну вібраційну технологічну машину АСВТМ 1, спіралеподібний робочий орган 8 якої поділено на кілька технологічних зон (зона А, …, зона G), що відрізняються технологічними умовами та параметрами впливу на сипучий матеріал (потужністю інфрачервоного випромінювання для нагріву віброкип'ячого шару, або температурою газу, яка різна для кожної зони tЗОНА A ... tЗОНА G ;, або іншого технологічного реагенту яким обробляється сипучий матеріал при реалізації певної технології) діє параметричне збурення 7. Адаптивна спіралеподібна вібраційна технологічна машина 1 з'єднана із блоком порівняння 2 та блоком синтезу 5, який з'єднаний із блоком 6 введення (оптимальних) технологічних параметрів вібраційного поля. Сигнал з виходу блока синтезу 5 поступає на блок порівняння 2, а з виходу блока порівняння 2 надходить у регулятор амплітуди збурюючої циклічної сили з його виходу надходить на вібропривод 4, що приводить у рух АСВТМ 1. Спосіб стабілізації швидкості вертикального вібротранспортування в адаптивних вібраційних технологічних машинах полягає у наступному. При дії на резонансну адаптивну спіралеподібну вібраційну технологічну машину 1 параметричного збурення 7 (зміна маси завантаження робочого органа M ) змінюється власна резонансна частота резонансної АСВТМ 1, що призводить до зміни амплітуди коливань спіралеподібного робочого органа 8, яка зумовлена зміщенням амплітудно-частотної характеристики АСВТМ по осі частот у ту чи іншу сторону залежно від напряму зміни параметричного збурення 7 ( M ). Для забезпечення резонансного режиму роботи застосовується зміна частоти циклічної вимушуючої сили віброприводу з метою забезпечення постійного резонансного режиму роботи АСВТМ, у результаті чого виникає зміна технологічно оптимального параметрів вібраційного поля, амплітуди коливань робочого органа A d та частоти (із заданої z ) на нову дійсну власну резонансну частоту АСВТМ 1. Технологічний процес у АСВТМ повинен відбуватися при наперед заданих параметрах 40 45 50 коливань z , A z , спіралеподібного робочого органа 8, для забезпечення оптимального часу перебування сипучого матеріалу в різних технологічних зонах (зона А, …, зона G), що відрізняються технологічними умовами та параметрами впливу на сипучий матеріал (потужністю інфрачервоного випромінювання для нагрівання віброкипучого шару, або t t температурою газу, яка різна для кожної зони ЗОНА A ... ЗОНА G , або іншого технологічного реагенту, яким обробляється сипучий матеріал при реалізації певної технології). Постійний в часі перехід на новий резонансний режим роботи вібромашини 1 зумовлює зміну заданої z , частоти роботи на нову дійсну d власну резонансну частоту. Це може стати причиною зміни швидкості вертикального транспортування сипучого матеріалу і, що головне, зміни часу перебування сипучого матеріалу в заданих технологічних зонах, що відрізняються технологічними умовами та параметрами впливу на сипучий матеріал. А це в свою чергу буде причиною порушення технологічного процесу обробки сипучого матеріалу. Для стабілізації швидкості вертикального транспортування сипучого матеріалу по спіралеподібному робочому органі 8 (на власній резонансній частоті АСВТМ 1) у блоці синтезу 5 постійно проводиться розрахунок нового необхідного значення AN амплітуди коливань робочого органа 8 на основі 2 UA 106526 C2 дійсного значення амплітуди коливань робочого органа A d та заданих через блок введення 6 5 оптимальних технологічних параметрів вібраційного поля z , A z , Розрахунок необхідного значення AN амплітуди коливань робочого органа 8 при кожній новій дійсній wd власній резонансній частоті проводиться, виходячи із залежності: Vсер k A z z cos() k AN d cos() . Тому в блоці синтезу 5 на основі виразу AN (z A z ) / d розраховується необхідне значення An амплітуди коливань робочого органа 8 при кожній новій власній резонансній частоті коливань АСВТМ 1. Завдяки даному співвідношенню ( AN (z A z ) / d ) , при амплітуді 10 AN буде забезпечуватись задана оптимальна швидкість вертикального транспортування сипучого матеріалу по спіралеподібному робочому органі 8 на довільній власній резонансній частоті коливань АСВТМ 1. Величина необхідного значення AN амплітуди коливань 15 спіралеподібного робочого органа 8 в блоці порівняння 2 порівнюється із дійсним A d значенням амплітуди коливань спіралеподібного робочого органа 8. На виході блока 2 отримуємо параметр A , який вказує на напрям корекції та її величину. Величина необхідної корекції амплітуди коливань робочого органа A подається на регулятор амплітуди збурюючої циклічної сили 3, де на підставі його знаку і величини A та розроблених оптимальних законів керування формується керуючий сигнал на вібропривод 4. Вібропривод 4 змінює значення амплітуди циклічної вимушуючої сили віброприводу в необхідну сторону та на необхідну величину 20 25 30 35 40 F . В результаті зворотного зв'язку по d та A d даний спосіб стабілізації швидкості вертикального вібротранспортування оброблюваного сипучого матеріалу в адаптивних спіралеподібних вібраційних технологічних машинах дозволяє на новій резонансній частоті постійно підтримувати технологічно оптимальні параметри вібраційного поля в процесі зміни маси завантаження спіралеподібного робочого органа АСВТМ. Джерела інформації:: 1. Пат. 10971 А Україна, B65G 27/24. Спосіб керування роботою машини із коливними рухами робочих органів. П.С Берник, Р. В. Чубик, В. А. Пашистий. (Україна). - № 200502375; Опубл. 15.12.2005; Бюл. № 12, 4 с 2. Пат. 92041 А Україна, B65G 27/100. Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин. Середа Л.П., Чубик Р.В., Ярошенко Л.В. (Україна). - № а200806209; Опубл. 27.09.2010; Бюл. № 18,3 с. 3. Сергеев А. П. Исследование процесса обработки, механизация и автоматизация вспомогательных работ на машинах для объемной вибрационной обработки// Механизация процесса снятия заусенцев. МДНТП. - М.: 1966. - С.74-85. 4. Сердюк Л.И., Давыденко Ю.А., Осина Л.М. Различные подходы к оценке динамических, энергетических и технологических возможностей вибрационных машин // Вибрации в технике и технологиях. Всеукраїнський науково-технічний журнал. 2004. - № 3(35) - С. 113-117. 5. Копылов Ю. Р. Амплитудные и фазо-частотные характеристики вибрирующей рабочей среды// Вибрации в технике и технологиях. Труды III международной научно-технической конференции. - Евпатория: 1998. - С. 133-137. 6. Членов В.А., Михайлов Н.В.Виброкипящий слой - М.: Наука, 1972. - 341 с. ФОРМУЛА ВИНАХОДУ 45 50 Спосіб стабілізації швидкості вертикального вібротранспортування в адаптивних спіралеподібних вібраційних технологічних машинах, за яким за допомогою системи керування віброприводом, яка відслідковує власну частоту коливань механічної коливної системи d , підтримують режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини за допомогою системи керування контролюють два параметри - частоту d та амплітуду A d коливань робочого органа, і у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини за допомогою системи 3 UA 106526 C2 керування коректують частоту та амплітуду вимушених коливань віброприводу робочого органа, до частоти d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа, який відрізняється тим, що амплітуду коливань робочого органа A d на резонансній частоті коректують за допомогою системи керування так, 5 щоб виконувалась умова: Ad (z A z ) / d , де z та A z - задані технологічно оптимальні параметри коливань робочого органа адаптивної спіралеподібної вібраційної технологічної машини. 10 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюChubyk Roman Vasyliovych, Yaroshenko Leonid Viktorovych
Автори російськоюЧубик Роман Васильевич, Ярошенко Леонид Викторович
МПК / Мітки
МПК: B65G 27/24
Мітки: стабілізації, швидкості, адаптивних, вібротранспортування, машинах, спосіб, вертикального, вібраційних, технологічних
Код посилання
<a href="https://ua.patents.su/6-106526-sposib-stabilizaci-shvidkosti-vertikalnogo-vibrotransportuvannya-v-adaptivnikh-vibracijjnikh-tekhnologichnikh-mashinakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації швидкості вертикального вібротранспортування в адаптивних вібраційних технологічних машинах</a>
Спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах
Номер патенту: 105075
Опубліковано: 10.04.2014
Автори: Чубик Роман Васильович, Ярошенко Леонід Вікторович
МПК: B65G 27/24
Мітки: технологічних, швидкості, адаптивних, вібротранспортування, вібраційних, машинах, стабілізації, горизонтального, спосіб
Формула / Реферат:
Спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної...
Метод стабілізації в’язкості віброкиплячого шару в адаптивних вібраційних технологічних машинах
Номер патенту: 105859
Опубліковано: 25.06.2014
Автори: Ярошенко Леонід Вікторович, Чубик Роман Васильович
МПК: B65G 27/00, B65G 27/24
Мітки: метод, в'язкості, стабілізації, адаптивних, вібраційних, машинах, шару, віброкиплячого, технологічних
Формула / Реферат:
Метод стабілізації в'язкості віброкиплячого шару в адаптивних вібраційних технологічних машинах (АВТМ), при якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи , підтримує режим роботи АВТМ, близький до резонансного, і в процесі її роботи контролює два параметри - частоту
Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин

Номер патенту: 92041
Опубліковано: 27.09.2010
Автори: Чубик Роман Васильович, Середа Леонід Павлович, Ярошенко Леонід Вікторович
МПК: B65G 27/00
Мітки: спосіб, адаптивних, машин, вібраційного, вібраційних, технологічних, технологічної, параметрів, стабілізації, оптимальних, поля
Формула / Реферат:
Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи wd, підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, який відрізняється тим, що в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два...
Спосіб керування роботою адаптивних вібраційних технологічних машин
Номер патенту: 87776
Опубліковано: 10.08.2009
Автори: Середа Леонід Павлович, Чубик Роман Васильович, Ярошенко Леонід Вікторович
МПК: B65G 27/00
Мітки: спосіб, технологічних, роботою, керування, машин, вібраційних, адаптивних
Формула / Реферат:
Спосіб керування роботою адаптивних вібраційних технологічних машин, при якому система керування віброприводом, відслідковуючи зсув фаз між амплітудою коливань робочого органа адаптивної вібраційної технологічної машини та амплітудою циклічної вимушуючої сили віброприводу, підтримує резонансний режим роботи адаптивної вібраційної технологічної машини, який відрізняється тим, що в процесі роботи адаптивної вібраційної технологічної машини...
Пристрій керування електромагнітним віброприводом адаптивних вібраційних технологічних машин
Номер патенту: 90820
Опубліковано: 25.05.2010
Автори: Середа Леонід Павлович, Ярошенко Леонід Вікторович, Чубик Роман Васильович
МПК: B65G 27/10
Мітки: вібраційних, технологічних, електромагнітним, пристрій, керування, машин, адаптивних, віброприводом
Формула / Реферат:
Пристрій для керування електромагнітним віброприводом адаптивних вібраційних технологічних машин, який включає коливну масу (робочий орган) із вібродатчиком, встановлену на пружній системі, і електромагнітний вібратор, з'єднаний із блоком керування, який відрізняється тим, що блок керування виконаний у вигляді двох контурів - первинного, який складається із підсилювача потужності, реалізованого на базі широтно-імпульсної модуляції, детектора...
Попередній патент: Система забезпечення оптимальних температур охолоджуючої рідини в двигуні внутрішнього згорання
Наступний патент: Муфта запобіжна
Випадковий патент: Електромагнітний перемішувач пульсуючого магнітного поля для рідких металів