Метод стабілізації в’язкості віброкиплячого шару в адаптивних вібраційних технологічних машинах
Номер патенту: 105859
Опубліковано: 25.06.2014
Формула / Реферат
Метод стабілізації в'язкості віброкиплячого шару в адаптивних вібраційних технологічних машинах (АВТМ), при якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи ![]() , підтримує режим роботи АВТМ, близький до резонансного, і в процесі її роботи контролює два параметри - частоту
, підтримує режим роботи АВТМ, близький до резонансного, і в процесі її роботи контролює два параметри - частоту ![]() та амплітуду
та амплітуду ![]() коливань робочого органа, і у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи АВТМ коректує частоту вимушуючих коливань віброприводу робочого органа, до частоти
коливань робочого органа, і у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи АВТМ коректує частоту вимушуючих коливань віброприводу робочого органа, до частоти ![]() , що близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа, який відрізняється тим, що амплітуду
, що близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа, який відрізняється тим, що амплітуду ![]() коливань робочого органа на резонансній частоті коректують системою керування так, щоб виконувалась умова
коливань робочого органа на резонансній частоті коректують системою керування так, щоб виконувалась умова ![]() , де
, де ![]() та
та ![]() задані технологічно оптимальні параметри вібраційного поля АВТМ.
задані технологічно оптимальні параметри вібраційного поля АВТМ.
Текст
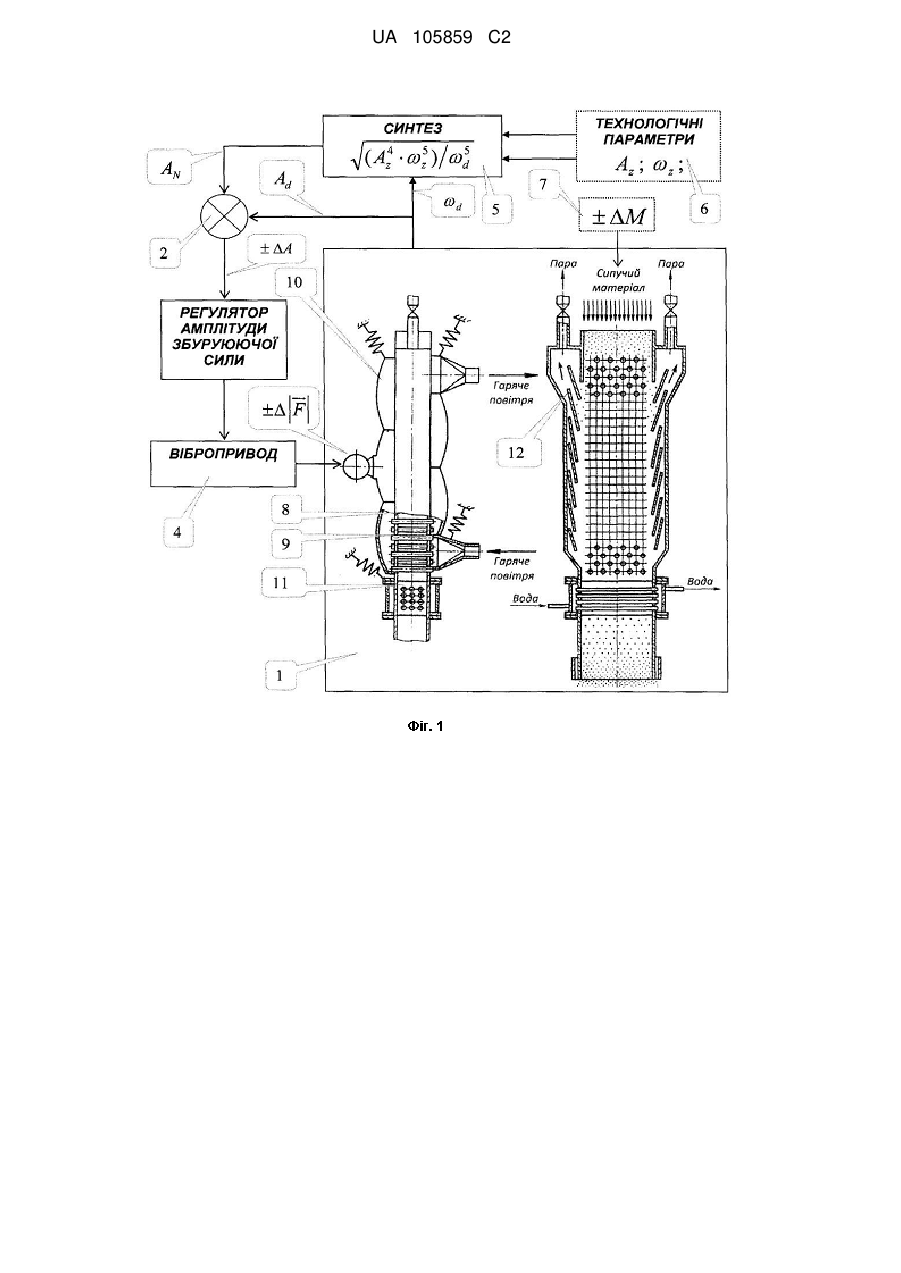
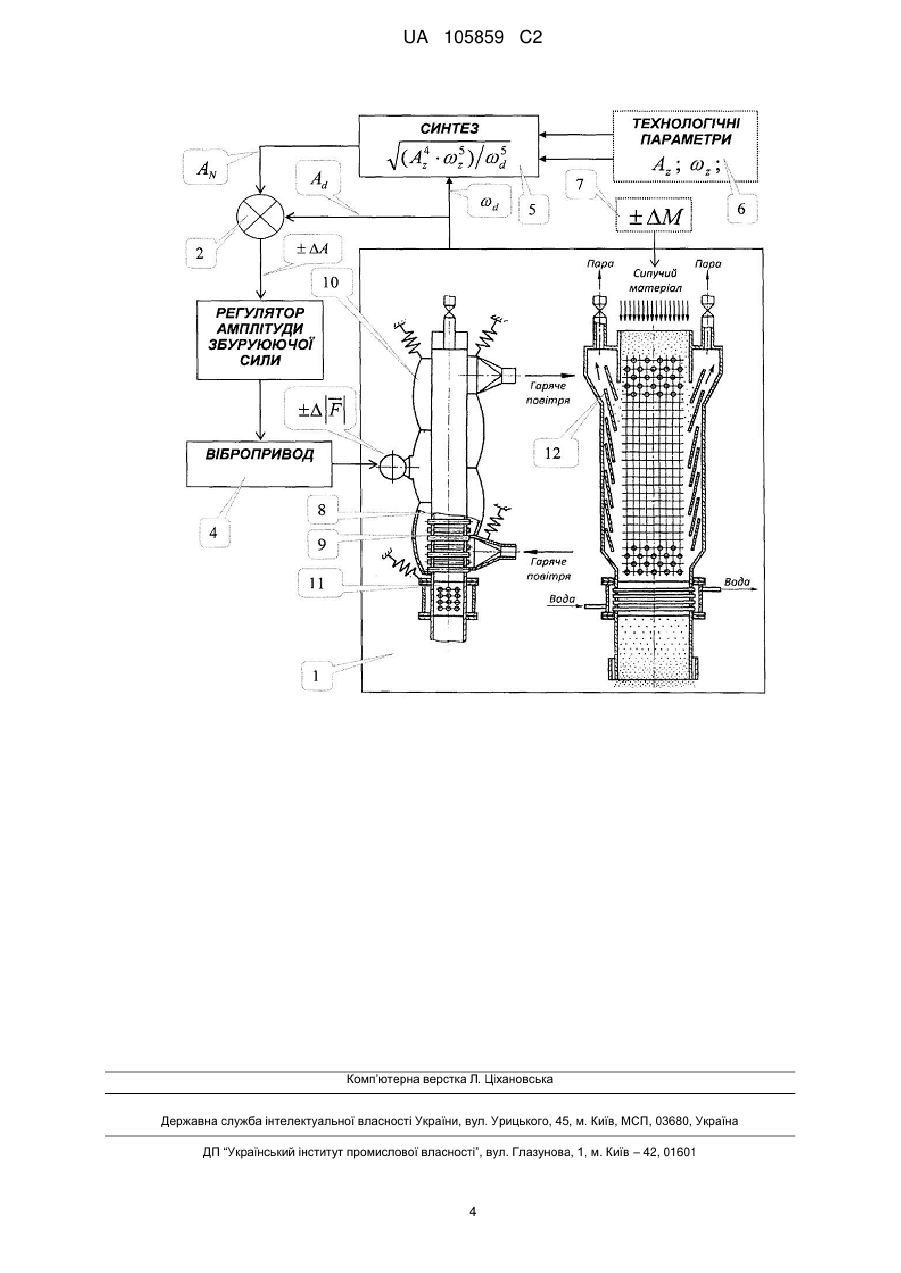
Реферат: Метод стабілізації в'язкості віброкиплячого шару в адаптивних вібраційних технологічних машинах (АВТМ), при якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи АВТМ, близький до резонансного. В процесі роботи система керування контролює два параметри - частоту d та амплітуду A d коливань робочого органу і, у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи АВТМ, коректує частоту вимушуючих коливань віброприводу робочого органа, до частоти d , що близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа. При цьому амплітуду A d коливань робочого органа на резонансній частоті коректують системою керування так, щоб виконувалась умова A d A 4 5 / 5 , де z та A z задані технологічно z z d оптимальні параметри вібраційного поля АВТМ. UA 105859 C2 (12) UA 105859 C2 UA 105859 C2 5 10 15 20 25 30 35 40 45 Винахід стосується вібраційної техніки і може знайти застосування в машинобудуванні та приладобудуванні, а також в гірничо-переробній, хімічній, харчовій, будівельній промисловості та сільськогосподарському виробництві. Відомий спосіб керування [1], в якому реалізується метод стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин (АВТМ) шляхом забезпечення контролю двох параметрів - частоти та амплітуди коливань робочого органа і у випадку зміни його завантаження або при необхідності зміни режиму роботи машини коректування частоти та амплітуди вимушуючих коливань приводу робочого органа до частоти, яка близька до резонансної частоти пружної системи вібромашини при заданому завантаженні робочого органа і амплітуди коливань на резонансній частоті так, щоб вона відповідала оптимальному режиму технологічного процесу. Недоліком даного методу стабілізації технологічних параметрів вібраційного поля АВТМ є те, що один і той же рівень амплітуди коливань робочого органа АВТМ на різних частотах може призвести до різної інтенсивності технологічного процесу, що для певних технологічних процесів є недопустимим. Найбільш близьким за технічною суттю є метод стабілізації технологічно оптимальних параметрів вібраційного поля АВТМ [2], в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи адаптивної вібраційної технологічної машини близький до резонансного, і в процесі роботи АВТМ система керування контролює два параметри - частоту d та амплітуду A d коливань робочого органа і у випадку зміни маси його завантаження або при необхідності зміни режиму роботи АВТМ система керування коректує частоту та амплітуду вимушуючих коливань віброприводу робочого органа до частоти d , яка близька до резонансної частоти пружної коливної системи АВТМ при заданому завантаженні робочого органа і амплітуду коливань виконувалась умова 50 робочого органа A d на резонансній частоті так, щоб виконувалась умова A d A 4 5 / 5 , z z d де z та A z задані технологічно оптимальні параметри вібраційного АВТМ. Недоліком такого методу стабілізації технологічних параметрів вібраційного поля АВТМ є те, що застосування питомої роботи вібраційного поля, як адекватного критерію доцільне лише для якісної та кількісної оцінки технологічних процесів, що пов'язані із віброабразивною обробкою деталей і не може забезпечити необхідної в'язкості шару сипучого матеріалу, яка є визначальною при здійсненні ряду технологічних процесів пов'язаних, наприклад, з тепломасообміном сипучих матеріалів. В основу винаходу поставлено задачу в методі стабілізації технологічно оптимальних параметрів вібраційного поля АВТМ, шляхом дотримання заданої в'язкості шару сипучого матеріалу у їхньому робочому органі, забезпечити точність реалізації технологічного процесу при роботі АВТМ та високу якість вихідної продукції. Поставлена задача досягається тим, що в методі стабілізації в'язкості віброкиплячого шару в АВТМ, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи АВТМ, близький до резонансного, і в процесі її роботи система керування контролює два параметри - частоту d та амплітуду A d коливань робочого органа, і у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи АВТМ, система керування коректує частоту та амплітуду вимушуючих коливань віброприводу робочого органа до частоти d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа, і амплітуду коливань робочого органа A d на резонансній частоті так, щоб A d A 4 5 / 5 , де z та A z задані технологічно оптимальні z z d параметри вібраційного поля АВТМ. Такий метод стабілізації в'язкості віброкиплячого шару сипучого матеріалу в АВТМ базується на забезпечені рівності (стабільності) в часі ефективної динамічної в'язкості віброкиплячого шару [3] при будь якому завантаженні робочого органа на робочій (власній резонансній) частоті АВТМ: 8 N , 2 4 S A d 5 d 1 UA 105859 C2 5 10 15 20 25 30 35 40 45 50 де N - потужність, яка передається сипучому матеріалу, що знаходиться у робочому органі АВТМ, S - площа поверхні робочого органа, яка передає коливання сипучому матеріалу, середня густина сипучого матеріалу, що знаходиться в робочому органі АВТМ. Даний метод дозволяє постійно підтримувати резонансний режим роботи АВТМ завдяки корекції d , а при резонансній частоті АВТМ проводиться стабілізація динамічної в'язкості шляхом корекції амплітуди коливань робочого органа A d , що забезпечує мінімальні енергозатрати на вібропривод при незмінній інтенсивності технологічного процесу роботи АВТМ та високій якості вихідної продукції. На кресленні зображено функціональну схему системи автоматичного керування віброприводом АВТМ, яка дозволяє реалізувати метод стабілізації в'язкості віброкиплячого шару сипучого матеріалу у її робочому органі на прикладі машини 1, що призначена для нагрівання, сушіння та охолодження сипучих матеріалів. АВТМ 1 складається із вертикального прямокутного робочого органа 8, в середині якого у шаховому порядку встановлено та жорстко із ним з'єднано горизонтальні трубчасті нагрівачі 9. Із зовні робочого органа 8 нагрівачі 9 підключені до перетічних коробів 10, через які в труби 9 подається гаряче повітря. На виході сипучого матеріалу із робочого органа 8 в труби 11 охолоджувача подають холодну воду. Вологу, що випаровується при сушінні сипучого матеріалу через жалюзі 12 та патрубки, які встановлені симетрично із двох сторін, виводять на зовні із корпусу АВТМ 1. Датчик параметрів вібрації, що встановлений на робочому органі АВТМ 1 з'єднаний із блоком порівняння 2 та блоком синтезу 5, який з'єднаний із блоком 6 введення технологічно оптимальних параметрів вібраційного поля. Сигнал з виходу блока синтезу 5 надходить на блок порівняння 2, а з виходу блока порівняння 2 надходить у регулятор амплітуди збурюючої циклічної сили 3 і з його виходу надходить на вібропривод 4, що приводить у рух АВТМ 1. В процесі роботи на АВТМ 1 діє параметричне збурення 7, яке являє собою приєднану масу M сипучого матеріалу, зерна якого (частинки) можуть бути з'єднані механічно або склеєні в грудки за рахунок різних фізико-хімічних процесів. Сипучий матеріал в АВТМ такого типу рухається вниз під дією сили тяжіння, тому неоднорідність характеристик сипучого матеріалу зумовлена склеюванням та зчіплюванням сипучого матеріалу у грудки забезпечувала б нестабільний прохід сипучого матеріалу крізь нагрівачі 9 вздовж робочого органа 8. Нагрівачі 9 розміщені перпендикулярно до потоку сипучого матеріалу, що проходить крізь робочий орган 8, та здійснюють разом із робочим органом 8 коливання по еліптичній траєкторії завдяки циклічній вимушуючій силі віброприводу 4. В результаті чого навколо нагрівачів 9 безпосередньо у потоці сипучого матеріалу утворюється віброкиплячий шар, в якому руйнуються грудки та активізуються тепломасообмінні процеси (між поверхнею нагрівачів 9 та сипучим матеріалом). Від в'язкості шару сипучого матеріалу залежить час перебування довільної частинки (зерна) у камері робочого органа 8. Зміна в'язкості сипучого шару у хаотичному порядку буде причиною того, що різні частинки сипучого матеріалу будуть перебувати в камері робочого органа 8 різний час і температурне поле може або їх перегріти або не догріти. Тому хаотична зміна в'язкості сипучого матеріалу у робочому органі 8 буде призводити до відхилень при реалізації даного технологічного процесу та низької якості вихідної продукції, оскільки в'язкість μ безпосередньо залежить від динамічних параметрів коливань робочого органа, тобто дійсної амплітуди A d та дійсної (резонансної) частоти коливань d робочого органа 8. Система керування АВТМ 1 при зміні маси завантаження M робочого органа 8 сипучим матеріалом, постійно проводитькорекцію частоти циклічної вимушуючої сили віброприводу 4 з метою забезпечення та підтримання постійного резонансного режиму роботи, як найвигіднішого з точки зору енергозбереження. Для стабілізації в'язкості шару сипучого матеріалу (його ефективної динамічної в'язкості [3]), необхідно за допомогою блока 6 вводити задані технологічно оптимальні параметри вібраційного поля ( z - задана частота коливань робочого органа 8, A z - задана амплітуда коливань робочого органа 8). Інформація про задане оптимальне значення параметрів вібраційного поля робочого органа 8 надходить у блок синтезу 5, де визначається A N необхідне значення амплітуди коливань робочого органа на його власній резонансній частоті коливань d (значення якої постійно надходить у блок 5 від датчика вібрації встановленого на робочому органі 8), яке дозволяє забезпечити заданий коефіцієнт в'язкості 55 віброкиплячого шару при будь-якій d робочій резонансній частоті коливань робочого органа 8. Розрахунок значення необхідної амплітуди коливань A N робочого органа 8 АВТМ 1 проводиться для забезпечення постійної рівності дійсного значення в'язкості 2 UA 105859 C2 4 d 8 N / S 2 A N 5 d 4 8 N / S 2 A 4 5 8 N / S 2 A N 5 , звідки z z d 5 10 15 20 25 із заданим оператором АВТМ z 8 N / S 2 A 4 5 , тобто: z z A 5 / 5 . У блоці 2 проводиться z d постійне порівняння необхідного значення амплітуди коливань A N робочого органа 8 із його дійсною амплітудою коливань A d , і на виході блока 2 отримується величина відхилення амплітуди A . За її модулем (абсолютною величиною) можна судити наскільки дійсна амплітуда коливань A d робочого органа 8 АВТМ 1 відрізняється від амплітуди коливань AN , що здатна забезпечити задану в'язкість z сипучого матеріалу на довільній робочій резонансні частоті d коливань органа 8 АВТМ 1. А за її знаком (±) можна зробити висновок, в яку сторону необхідно проводити корекцію дійсної амплітуди коливань A d робочого органа 8 АВТМ 1 для того, щоб забезпечити задану в'язкість z сипучого матеріалу на довільній робочій резонансній частоті d . Тому на основі сигналу від блока 2, блок 3 регулятор амплітуди збурюючої сили постійно в часі проводить корекцію A d дійсної амплітуди коливань робочого органа 8 АВТМ 1 так, щоб завжди при довільній робочій резонансній частоті d виконувалась умова A d AN , тобто в'язкість віброкиплячого шару сипучого матеріалу завжди відповідала заданій величині, що є оптимальною для даного технологічного процесу. Блок 3 безпосередньо впливає на вібропривод 4 АВТМ 1, змінюючи амплітуду циклічної вимушуючої сили у певному напрямі на задане значення F . AN 4 z В результаті зворотного зв'язку по d та A d даний метод стабілізації в'язкості віброкиплячого шару сипучого матеріалу в АВТМ дозволяє на власній резонансній частоті постійно підтримувати задані технологічно оптимальні параметри вібраційного поля в процесі зміни маси завантаження M робочого органа АВТМ. Джерела інформації: 1. Спосіб керування роботою машини із коливними рухами робочих органів. Пат. 10971 А Україна, B65G27/24. П.С Берник, Р.В. Чубик, В.А. Пашистий. (Україна). - № 200502375; Опубл. 15.12.2005; Бюл. № 12. - 4 с. 2. Пат. 92041 А Україна, B65G 27/100. Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин. Середа Л.П., Чубик Р.В., Ярошенко Л.В. (Україна). - № а200806209; Опубл. 27.09.2010; Бюл. № 18, 3 ст. 3. Членов В.А., Михайлов Η.В. Виброкипящий слой. - Μ.: Наука, 1972. - 341 с. 30 ФОРМУЛА ВИНАХОДУ 35 40 Метод стабілізації в'язкості віброкиплячого шару в адаптивних вібраційних технологічних машинах (АВТМ), при якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи АВТМ, близький до резонансного, і в процесі її роботи контролює два параметри - частоту d та амплітуду A d коливань робочого органа, і у випадку зміни маси завантаження робочого органа або при необхідності зміни режиму роботи АВТМ коректує частоту вимушуючих коливань віброприводу робочого органа, до частоти d , що близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органа, який відрізняється тим, що амплітуду A d коливань робочого органа на резонансній частоті коректують системою керування так, щоб виконувалась умова A d A 4 5 / 5 , де z та A z задані технологічно z z d оптимальні параметри вібраційного поля АВТМ. 3 UA 105859 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюChubyk Roman Vasyliovych, Yaroshenko Leonid Viktorovych
Автори російськоюЧубик Роман Васильевич, Ярошенко Леонид Викторович
МПК / Мітки
МПК: B65G 27/24, B65G 27/00
Мітки: метод, технологічних, стабілізації, шару, в'язкості, машинах, адаптивних, віброкиплячого, вібраційних
Код посилання
<a href="https://ua.patents.su/6-105859-metod-stabilizaci-vyazkosti-vibrokiplyachogo-sharu-v-adaptivnikh-vibracijjnikh-tekhnologichnikh-mashinakh.html" target="_blank" rel="follow" title="База патентів України">Метод стабілізації в’язкості віброкиплячого шару в адаптивних вібраційних технологічних машинах</a>
Спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах
Номер патенту: 105075
Опубліковано: 10.04.2014
Автори: Ярошенко Леонід Вікторович, Чубик Роман Васильович
МПК: B65G 27/24
Мітки: спосіб, вібротранспортування, технологічних, машинах, вібраційних, стабілізації, швидкості, адаптивних, горизонтального
Формула / Реферат:
Спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної...
Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин

Номер патенту: 92041
Опубліковано: 27.09.2010
Автори: Ярошенко Леонід Вікторович, Чубик Роман Васильович, Середа Леонід Павлович
МПК: B65G 27/00
Мітки: стабілізації, вібраційних, машин, адаптивних, технологічної, спосіб, параметрів, технологічних, вібраційного, оптимальних, поля
Формула / Реферат:
Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи wd, підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, який відрізняється тим, що в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два...
Спосіб керування роботою адаптивних вібраційних технологічних машин
Номер патенту: 87776
Опубліковано: 10.08.2009
Автори: Ярошенко Леонід Вікторович, Середа Леонід Павлович, Чубик Роман Васильович
МПК: B65G 27/00
Мітки: вібраційних, роботою, машин, адаптивних, керування, технологічних, спосіб
Формула / Реферат:
Спосіб керування роботою адаптивних вібраційних технологічних машин, при якому система керування віброприводом, відслідковуючи зсув фаз між амплітудою коливань робочого органа адаптивної вібраційної технологічної машини та амплітудою циклічної вимушуючої сили віброприводу, підтримує резонансний режим роботи адаптивної вібраційної технологічної машини, який відрізняється тим, що в процесі роботи адаптивної вібраційної технологічної машини...
Пристрій керування електромагнітним віброприводом адаптивних вібраційних технологічних машин
Номер патенту: 90820
Опубліковано: 25.05.2010
Автори: Чубик Роман Васильович, Середа Леонід Павлович, Ярошенко Леонід Вікторович
МПК: B65G 27/10
Мітки: машин, технологічних, віброприводом, адаптивних, пристрій, керування, електромагнітним, вібраційних
Формула / Реферат:
Пристрій для керування електромагнітним віброприводом адаптивних вібраційних технологічних машин, який включає коливну масу (робочий орган) із вібродатчиком, встановлену на пружній системі, і електромагнітний вібратор, з'єднаний із блоком керування, який відрізняється тим, що блок керування виконаний у вигляді двох контурів - первинного, який складається із підсилювача потужності, реалізованого на базі широтно-імпульсної модуляції, детектора...
Пружна опора для вібраційних пристроїв
Номер патенту: 23325
Опубліковано: 25.05.2007
Автори: Нестеренко Микола Петрович, Скляренко Тарас Олександрович, Нестеренко Микола Миколайович
МПК: F16F 3/00
Мітки: пружна, пристроїв, вібраційних, опора
Формула / Реферат:
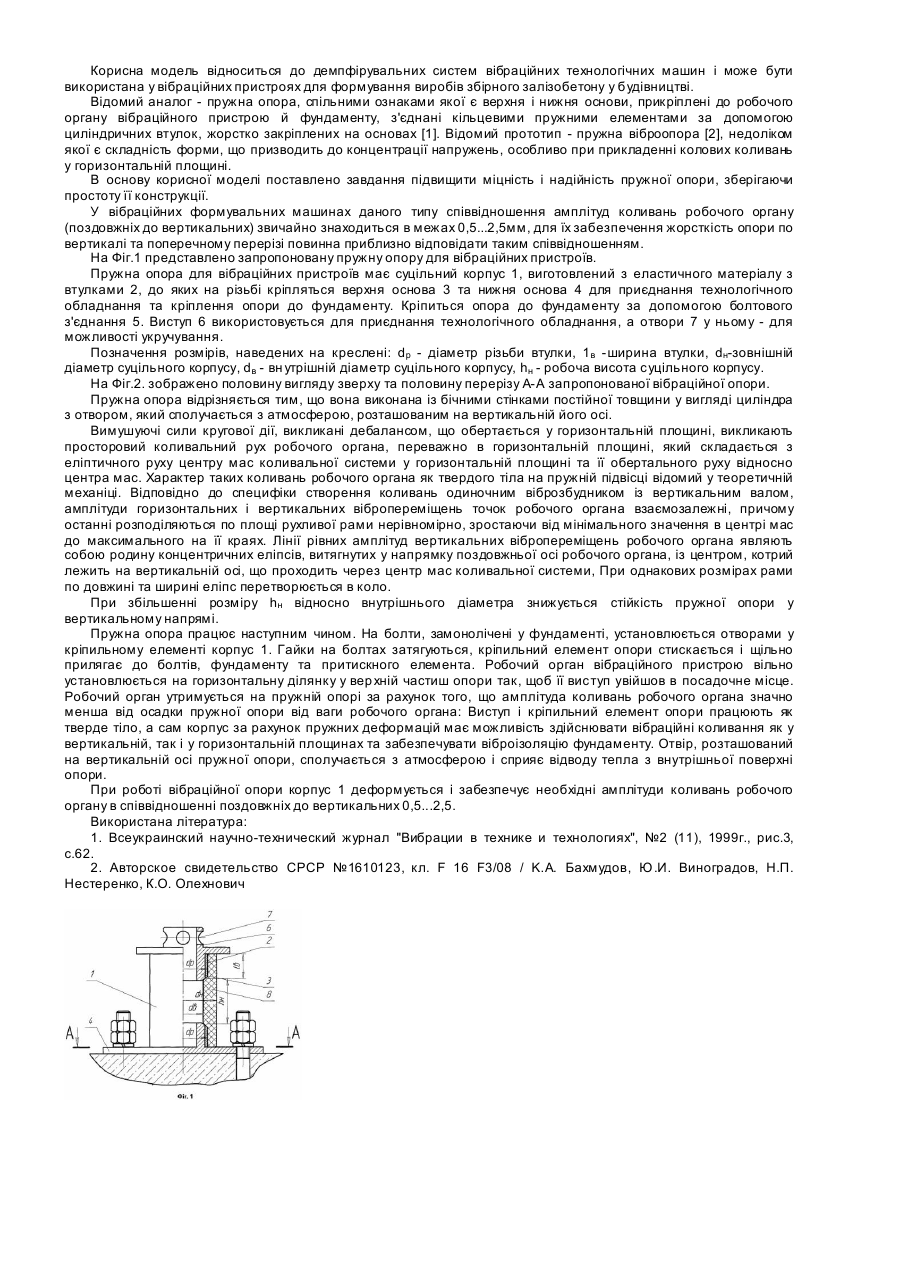
Пружна опора для вібраційних пристроїв, що містить суцільний корпус, виготовлений з еластичного матеріалу, з верхньою та нижньою основами для приєднання технологічного обладнання та кріплення опори до фундаменту, яка відрізняється тим, що виконана з бічними стінками постійної товщини у вигляді циліндра з отвором, що сполучається з атмосферою, розташованим на вертикальній його осі, через який здійснюють відведення тепла, причому співвідношення...
Наступний патент: Електрична машина змінного струму
Випадковий патент: Товстоплівковий резистивний елемент