Спосіб керування роботою адаптивних вібраційних технологічних машин
Номер патенту: 87776
Опубліковано: 10.08.2009
Автори: Середа Леонід Павлович, Ярошенко Леонід Вікторович, Чубик Роман Васильович

Формула / Реферат
Спосіб керування роботою адаптивних вібраційних технологічних машин, при якому система керування віброприводом, відслідковуючи зсув фаз між амплітудою коливань робочого органа адаптивної вібраційної технологічної машини та амплітудою циклічної вимушуючої сили віброприводу, підтримує резонансний режим роботи адаптивної вібраційної технологічної машини, який відрізняється тим, що в процесі роботи адаптивної вібраційної технологічної машини система керування контролює зсув фаз між коливаннями робочого органу адаптивної вібраційної технологічної машини та коливаннями циклічної вимушуючої сили віброприводу, і у випадку зміни завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує частоту циклічної вимушуючої сили віброприводу, наближаючи її до частоти, котра близька до частоти власних коливань пружної системи адаптивної вібраційної технологічної машини, таким чином, щоб коливання циклічної вимушуючої сили віброприводу випереджали по фазі коливання робочого органу адаптивної вібраційної технологічної машини на кут ![]() .
.
Текст
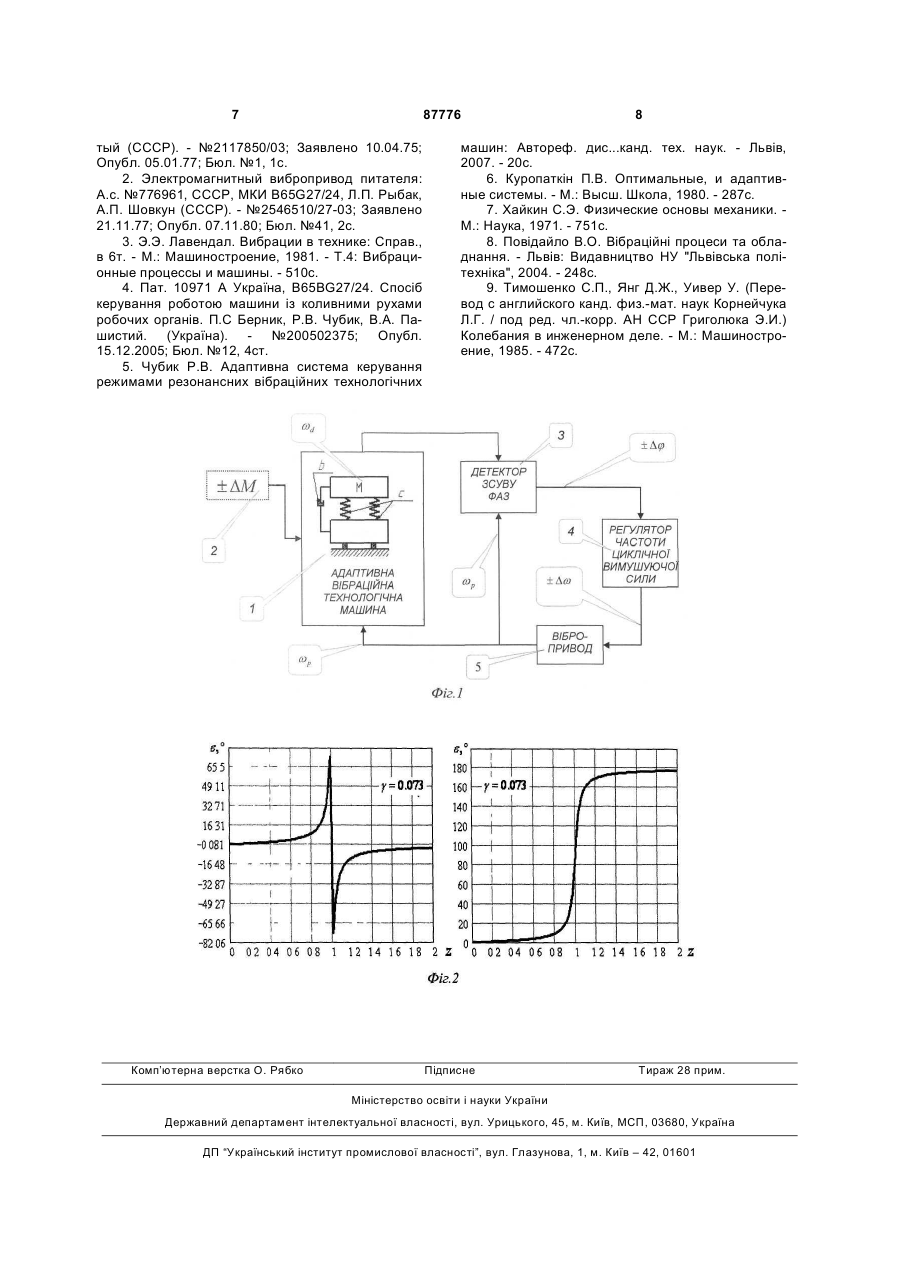
Спосіб керування роботою адаптивних вібраційних технологічних машин, при якому система керування віброприводом, відслідковуючи зсув фаз між амплітудою коливань робочого органа C2 2 (19) 1 3 ВТМ на новій власній резонансній частоті, тому це буде причиною затухання ВТМ; - збільшення приведеної маси згідно [3] приводить до зменшення резонансної частоти коливань механічної системи і система керування проведе зміну частоти з певною точністю завдяки датчику вібрації, але для того щоб амплітуда коливань системи, із більшою масою на новій власній резонансній частоті залишилася незмінною, необхідно проводити автоматичну корекцію амплітуди циклічної вимушуючої сили віброприводу, тобто система керування згідно [2] не може здійснювати автоматичне регулювання амплітуди циклічної вимушуючої сили, тому такий спосіб керування не забезпечує стійкої роботи ВТМ та не дозволяє підтримувати технологічно задане оптимальне значення амплітуди коливань робочого органу ВТМ. Найближчим за технічною суттю є спосіб керування роботою машини із коливними рухами робочих органів [4], де в процесі роботи ВТМ система керування контролює два параметри - частоту та амплітуду коливань робочого органу і у випадку зміни завантаження робочого органу або при необхідності зміни режиму роботи вібромашини система керування коректує частоту та амплітуду вимушуючих коливань віброприводу робочого органу, до частоти яка близька до резонансної частоти пружної системи вібромашини при заданому завантаженні робочого органу і амплітуду коливань на резонансній частоті так, що б вона відповідала оптимальному режиму технологічного процесу. Такий спосіб керування дозволяє автоматизувати процес налагодження частоти і амплітуди вимушуючих коливань віброприводу робочого органу ВТМ при зміні завантаження робочого органу або при необхідності зміни режиму роботи вібромашини до значень, які відповідають резонансному режиму роботи. Вібромашини які реалізують такий спосіб керування мають назву адаптивних вібраційних технологічних машин (АВТМ) [5] завдяки постійній адаптації параметрів віброприводу до нових параметрів коливної механічної системи та забезпечують мінімальні енергозатрати на вібропривід. Недоліком такого способу керування роботою АВТМ є те, що він базується на пошуку екстремуму амплітудно-частотної характеристики (АЧХ) АВТМ у якому закладено пошукові алгоритми роботи що мають певну невизначеність і висновок про напрям переміщення власної резонансної частоти АВТМ можна зробити лише за реакцією механічної коливної системи АВТМ на корегувальну дію екстремальної адаптивної системи керування, тому такий спосіб керування, через додаткові затрати часу на визначення напряму корекції не забезпечує високої якості і точності керування та мінімальних енергозатрат на вібропривід, що зумовлюється тимчасово не резонансним режимом роботи АВТМ. Метою винаходу є розширення функціональних можливостей адаптивних вібраційних технологічних машин і економія електроенергії, яка витрачається на їх вібропривід. 87776 4 Поставлена мета досягається тим, що в способі керування роботою адаптивних вібраційних технологічних машин, в якому система керування віброприводом, відслідковуючи зсув фаз між амплітудою коливань робочого органа адаптивної вібраційної технологічної машини та амплітудою циклічної вимушуючої сили віброприводу, підтримує резонансний режим роботи адаптивної вібраційної технологічної машини, згідно винаходу, в процесі роботи адаптивної вібраційної технологічної машини система керування контролює зсув фаз між коливаннями робочого органа адаптивної вібраційної технологічної машини та коливаннями вимушуючої сили віброприводу і у випадку зміни завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує частоту циклічної вимушуючої сили віброприводу наближаючи її до частоти яка близька до резонансної частоти пружної системи адаптивної вібраційної технологічної машини при заданому завантаженні робочого органу таким чином, щоб коливання вимушуючої сили віброприводу випереджали по фазі коливання робочого органа адаптивної вібраційної технологічної машини на кут p/2. Даний спосіб керування роботою адаптивних вібраційних технологічних машин дозволяє перейти від екстремально-пошукових [6] систем керування віброприводом АВТМ до слідкуючих систем керування. Така система керування буде постійно слідкувати за зсувом фаз коливань робочого органа АВТМ і коливань вимушуючої сили віброприводу, та зводити його відхилення від оптимального кута рівного p/2 до нуля за рахунок зміни частоти циклічної вимушуючої сили віброприводу. На Фіг.1 зображено функціональну схему способу керування роботою адаптивних вібраційних технологічних машин. Адаптивна вібраційна технологічна машина 1 завдяки зворотному зв'язку через датчик частоти коливань робочого органу w d з'єднана із детектором зсуву фаз 3. На другий вхід детектора зсуву фаз 3 поступає сигнал прямо пропорційний частоті циклічної вимушуючої сили віброприводу - w p . Детектор зсуву фаз 3 з'єднаний із регулятором частоти циклічної вимушуючої сили 4. Регулятор частоти циклічної вимушуючої сили 4 безпосередньо з'єднаний із віброприводом 5, а вібропривод 5 із адаптивною вібраційною технологічною машиною 1 на яку діє 2 збурюючий фактор ± DM зміни маси завантаження робочого органа АВТМ 1. Спосіб керування роботою адаптивних вібраційних технологічних машин, базується на аналізі розв'язку основного диференційного рівняння руху механічних коливних систем: d2 s ds M +b + k × s = F0 × sin (w × t ) (1) dt dt де Μ - приведена маса АВТМ; s - переміщення робочого органу АВТМ; f (f - коефіцієнт сили тертя, опору повітb= s ря); k - жорсткість пружної системи АВТМ; 5 87776 F0 - амплітуда циклічної вимушуючої сили віброприводу. Sa = F æ - M × w2 + k 2 ö + (b × w)2 ÷ ç ø è = 2 M × æ w2 - w2 ö + 4 × a 2 × w2 ÷ ç 0 ø è ö ÷ ÷ ÷ ÷ ÷ ø (3) Загальне рівняння руху, що пов'язує рух робочого органу АВТМ із циклічною вимушуючою силою віброприводу F у робочому амплітудночастотному діапазоні має вигляд: F S( t ) = × m × sin (w × t - e ), (4) k де m - коефіцієнт підсилення [9], що характеризує динамічні властивості АВТМ на всій ділянці АЧХ і має вигляд: 1 m= ö æ ç w2 ÷ ÷ ç1 ç w2 ÷ 0ø è 2 1 = w2 + g2 × w2 0 æ1 - z 2 ö ÷ ç ø è 2 Згідно з [7, 8, 9], розв'язком диференційного рівняння (1) є вираз: S( t ) = S a × sin(w × t - e ) , (2) F де w - частота циклічної вимушуючої сили віброприводу; w0 - власна резонансна частота АВТМ; g - коефіцієнт демпфірування; e - зсув фаз між коливаннями робочого органу АВТМ та коливаннями циклічної вимушуючої сили віброприводу, що рівний: w æ ç g× ö æ æ ö ç 2× w× a ÷ b×w ç w0 ÷ = arctan ç e = arctan ç ÷ = arctan ç ç ÷ w ç w2 - w2 ÷ è - M × w2 + k ø ç ø è 0 ç 1- w 0 è 6 , + g 2 × z2 де z= w / w0 - коефіцієнт відлагодження. Враховуючи дисипативні втрати енергії (наприклад для витих циліндричних пружин g =0,073) у АВТМ можна за допомогою виразу (3) дослідити зсув фаз між коливаннями робочого органу АВТМ та коливаннями циклічної вимушуючої сили віброприводу. Результати такого дослідження наведено на Фіг.2, з якої видно, що в зоні резонансу (0,9≤z≤1,1) існує дуже різка зміна кута зсуву фаз і при резонансі існує відставання вимушених коливань робочого органа АВТМ від циклічної вимушуючої сили віброприводу на чверть періоду (p/2). Автоматично підтримуючи співвідношення між переміщенням робочого органу АВТМ та циклічною вимушуючою силою віброприводу постійно рівним p/2 за допомогою корекції (z= w / w0 ) частоти циклічної вимушуючої сили віброприводу w до власної резонансної частоти АВТМ w0 можна забезпечити постійний резонансний режим роботи. Слід взяти також до уваги, що згідно з [7, 8, 9] максимум коефіцієнта підсилення m і відповідно максимум і АЧХ АВТМ має місце не при w / w0 =1, а при виконанні умови: = q 1 × ; 2 æ ö w 0 ç w2 w2 ÷ 2 ç1 - 2 ÷ + g × 2 ç w w ÷ 0ø 0 è w = 1- 2 × g 2 . w0 Враховуючи те, що значення коефіцієнта демпфірування g для АВТМ є мізерним, (наприклад при дане співвідношення рівне g =0,073 w / w0 =0,99997160) тому при розрахунках можна брати співвідношення w / w0 =1. Спосіб керування роботою адаптивних вібраційних технологічних машин полягає у наступному. При зміні приведеної маси 2 (Фіг.1) ± DM у АВТМ 1 відбувається зсув фаз між коливаннями вимушуючої сили віброприводу та вимушеними коливаннями робочого органу АВТМ. В детекторі зсуву фаз 3 постійно в робочому режимі проходить порівняння та визначення величини відставання або випередження між двома гармонійними сигналами, частоти коливань робочого органа адаптивної вібраційної технологічної машини w d та частоти циклічної вимушуючої сили віброприводу w p . Сигнал пропорційний зсуву фаз ± Dj після визначення поступає в 4 регулятор частоти циклічної вимушуючої сили, де відповідно до закладених законів керування виробляється необхідний приріст частоти циклічної вимушуючої сили віброприводу ± Dw , який через вібропривод 5 впливає на АВТМ 1 та зводить заданий зсув фаз між вимушуючими та вимушеними коливаннями до оптимального з точки зору точності дотримання резонансного режиму значення (p/2). Таким чином відбувається адаптація вібромашини до нової маси завантаження робочого органу та забезпечується резонансний режим роботи АВТМ. Застосування запропонованого способу керування роботою адаптивних вібраційних технологічних машин дозволить оптимізувати процес керування ними та забезпечити оптимальні режими роботи при мінімальних затратах енергії на вібропривод. Зменшення енергозатрат зумовлене тим, що таке керування дозволяє швидше проводити корекцію нерезонансного режиму роботи, а як наслідок машина менше часу працюватиме при економічно невигідних нерезонансних режимах. Окрім того даний спосіб зводить до мінімуму різкі зростання амплітуди коливань у перехідних процесах, які звичайно спостерігаються при зміні маси завантаження чи зміні режимів роботи та параметрів технологічного процесу. Література: 1. Вибрационный питатель: А.с. №541740 СССР, МКИ В65G27/00, В.П. Чайка, В.А. Пашыс 7 87776 тый (СССР). - №2117850/03; Заявлено 10.04.75; Опубл. 05.01.77; Бюл. №1, 1с. 2. Электромагнитный вибропривод питателя: А.с. №776961, СССР, МКИ В65G27/24, Л.П. Рыбак, А.П. Шовкун (СССР). - №2546510/27-03; Заявлено 21.11.77; Опубл. 07.11.80; Бюл. №41, 2с. 3. Э.Э. Лавендал. Вибрации в технике: Справ., в 6т. - М.: Машиностроение, 1981. - Т.4: Вибрационные процессы и машины. - 510с. 4. Пат. 10971 А Україна, B65BG27/24. Спосіб керування роботою машини із коливними рухами робочих органів. П.С Берник, Р.В. Чубик, В.А. Пашистий. (Україна). - №200502375; Опубл. 15.12.2005; Бюл. №12, 4ст. 5. Чубик Р.В. Адаптивна система керування режимами резонансних вібраційних технологічних Комп’ютерна верстка О. Рябко 8 машин: Автореф. дис...канд. тех. наук. - Львів, 2007. - 20с. 6. Куропаткін П.В. Оптимальные, и адаптивные системы. - Μ.: Высш. Школа, 1980. - 287с. 7. Хайкин С.Э. Физические основы механики. М.: Наука, 1971. - 751с. 8. Повідайло В.О. Вібраційні процеси та обладнання. - Львів: Видавництво НУ "Львівська політехніка", 2004. - 248с. 9. Тимошенко С.П., Янг Д.Ж., Уивер У. (Перевод с английского канд. физ.-мат. наук Корнейчука Л.Г. / под ред. чл.-корр. АН ССР Григолюка Э.И.) Колебания в инженерном деле. - М.: Машиностроение, 1985. - 472с. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of operation of adaptive vibration technological machines
Автори англійськоюSereda Leonid Pavlovych, Chubyk Roman Vasyliovych, Yaroshenko Leonid Viktorovych
Назва патенту російськоюСпособ управления работой адаптивных вибрационных технологических машин
Автори російськоюСереда Леонид Павлович, Чубик Роман Васильевич, Ярошенко Леонид Викторович
МПК / Мітки
МПК: B65G 27/00
Мітки: адаптивних, машин, технологічних, роботою, керування, спосіб, вібраційних
Код посилання
<a href="https://ua.patents.su/4-87776-sposib-keruvannya-robotoyu-adaptivnikh-vibracijjnikh-tekhnologichnikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування роботою адаптивних вібраційних технологічних машин</a>
Спосіб керування роботою машини із коливними рухами робочих органів
Номер патенту: 10971
Опубліковано: 15.12.2005
Автори: Пашистий Вадим Ананієвич, Берник Павло Степанович, Чубик Роман Васильович
МПК: B65G 27/10
Мітки: спосіб, коливними, машини, органів, керування, рухами, роботою, робочих
Формула / Реферат:
1. Спосіб керування роботою машин з коливними рухами робочих органів, при якому за допомогою системи керування приводом відслідковують власну частоту коливань механічної системи, підтримуючи режим роботи машини близьким до резонансного, який відрізняється тим, що в процесі роботи машини через систему керування безперервно контролюють два параметри - частоту та амплітуду коливань робочого органа, і у випадку зміни завантаження робочого органа...
Спосіб керування роботою наповнювально-зливної системи гідравлічного преса
Номер патенту: 38880
Опубліковано: 26.01.2009
Автори: Корчак Олена Сергіївна, Шинкаренко Олег Михайлович
МПК: B21B 15/00
Мітки: наповнювально-зливної, роботою, системі, спосіб, керування, гідравлічного, преса
Формула / Реферат:
Спосіб керування роботою наповнювально-зливної системи гідравлічного преса шляхом відкриття наповнювально-зливного клапана під час ходу наближення, його закриття під час робочого ходу та відкриття на зворотному ході, який відрізняється тим, що наповнювально-зливним клапаном керує індивідуальний сервопривод так, що клапан примусово знаходиться у постійно відкритому стані, а його примусове закриття сервоприводом здійснюється тільки під час...
Привід вібраційних машин
Номер патенту: 42469
Опубліковано: 10.07.2009
Автори: Архангельський Георгій Володимирович, Архангельський Андрій Георгійович
МПК: B07B 1/28
Мітки: привід, машин, вібраційних
Формула / Реферат:
Привід вібраційних машин, що містить електродвигун та кривошипно-шатунний механізм, який відрізняється тим, що двигун жорстко зв'язаний з однією ланкою механізму вільного ходу, а кривошип жорстко зв'язаний з другою ланкою механізму вільного ходу.
Спосіб автоматичного керування роботою радіального згущувача
Номер патенту: 65883
Опубліковано: 15.04.2004
Автор: Шпильовий Леонід Вікторович
МПК: B01D 21/00
Мітки: автоматичного, роботою, радіального, спосіб, керування, згущувача
Формула / Реферат:
Спосіб автоматичного керування роботою радіального згущувача, що включає вимірювання навантаження на його ферму, який відрізняється тим, що додатково вимірюється швидкість обертання ферми та визначається висота шару ущільненого осаду, а швидкість обертання ферми змінюють залежно від визначеного значення висоти шару осаду.
Спосіб керування роботою газового нагрівального пристрою
Номер патенту: 22563
Опубліковано: 25.04.2007
Автори: Клевцов Олексій Іванович, Вознюк Віктор Володимирович
Мітки: газового, роботою, пристрою, спосіб, керування, нагрівального
Формула / Реферат:
1. Спосіб керування роботою газового нагрівального пристрою, що включає контроль температури середовища, що нагрівається, наявності полум'я на пальнику, наявності тяги і тиску газу як поточних параметрів роботи пристрою, порівняння значень поточних параметрів із заданими значеннями цих параметрів, і на підставі результатів порівняння - вироблення сигналів: для блокування роботи пристрою при виявленні позамежних значень поточних параметрів,...
Попередній патент: Пристрій для вимірювання параметрів інклінації, ангуляції та ротації зубів
Наступний патент: Модульно структурований військовий наземний робот
Випадковий патент: Пристрій для регулювання температури в приміщенні споруди, наприклад теплиці