Пристрій керування електромагнітним віброприводом адаптивних вібраційних технологічних машин
Номер патенту: 90820
Опубліковано: 25.05.2010
Автори: Середа Леонід Павлович, Чубик Роман Васильович, Ярошенко Леонід Вікторович

Формула / Реферат
Пристрій для керування електромагнітним віброприводом адаптивних вібраційних технологічних машин, який включає коливну масу (робочий орган) із вібродатчиком, встановлену на пружній системі, і електромагнітний вібратор, з'єднаний із блоком керування, який відрізняється тим, що блок керування виконаний у вигляді двох контурів - первинного, який складається із підсилювача потужності, реалізованого на базі широтно-імпульсної модуляції, детектора зсуву фаз, елемента порівняння зсуву фаз, задавача зсуву фаз та регулятора частоти циклічної примушуючої сили, та вторинного, який складається із елемента задання технологічно-оптимальних параметрів коливань робочого органу, елемента синтезу необхідного значення амплітуди коливань робочого органу, елемента порівняння амплітуди, регулятора амплітуди циклічної примушуючої сили електромагнітного віброприводу та підсилювача, реалізованого на базі широтно-імпульсної модуляції, причому вихід вібродатчика з'єднаний із входами детектора зсуву фаз, елементом синтезу необхідного значення амплітуди коливань та елементом порівняння амплітуди, другий вхід детектора зсуву фаз з'єднаний із елементом підсилення на базі широтно-імпульсної модуляції, а вихід - із входом елемента порівняння зсуву фаз, другий вхід якого з'єднаний із задавачем зсуву фаз, вихід елемента порівняння зсуву фаз з'єднаний із входом регулятора частоти циклічної примушуючої сили, вихід якого з'єднаний із підсилювачем на базі широтно-імпульсної модуляції, у свою чергу два інші входи елемента синтезу необхідного значення амплітуди коливань робочого органу з'єднані із елементом задання технологічно-оптимальних параметрів коливань робочого органу, а вихід - із другим входом елемента порівняння амплітуди, вихід якого з'єднаний із входом регулятора амплітуди циклічної примушуючої сили, вихід якого з'єднаний із підсилювачем на базі широтно-імпульсної модуляції, вихід підсилювача з'єднаний із електромагнітним віброприводом.
Текст
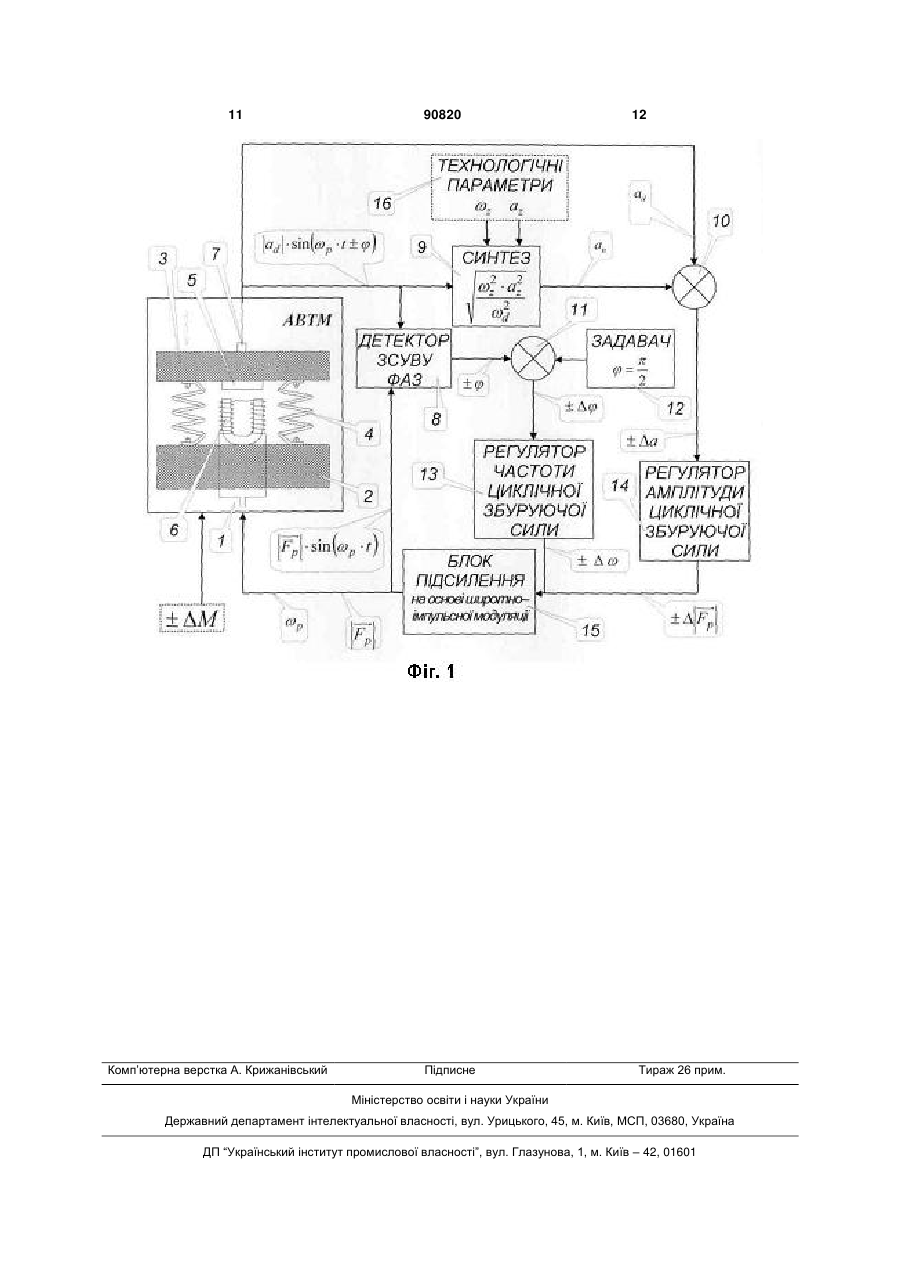
Пристрій для керування електромагнітним віброприводом адаптивних вібраційних технологічних машин, який включає коливну масу (робочий орган) із вібродатчиком, встановлену на пружній системі, і електромагнітний вібратор, з'єднаний із блоком керування, який відрізняється тим, що блок керування виконаний у вигляді двох контурів - первинного, який складається із підсилювача потужності, реалізованого на базі широтноімпульсної модуляції, детектора зсуву фаз, еле C2 2 (11) 1 3 при чому вихід дільника імпульсної послідовності підключено до генератора пилоподібних імпульсів, а через генератор запускаючих імпульсів - до керуючого електроду силового тиристора. Даний пристрій забезпечує фазо-імпульсне регулювання, із можливістю зміни цілочисельного значення коефіцієнта поділу випрямленої напруги, це дозволяє регулювати частоту роботи віброприводу. Недоліком даного пристрою є те, що він не може автоматично змінювати частоту роботи віброприводу при зміні маси завантаження робочого органу ВТМ. Відомий також пристрій [2], що дозволяє здійснювати автоматичне підлаштування частоти вимушуючої сили до резонансної частоти механічної коливної системи у якому, за рахунок відслідковування власної частоти коливань механічної коливної системи, проходить процес підсилення сигналу отриманого від датчика вібрації двома підсилювачами, а вихідний силовий сигнал подається на електромагнітний вібропривод адаптивної вібраційної технологічної машини (АВТМ). Однак і цей пристрій має такі недоліки: - збільшення приведеної маси приводить до зменшення резонансної частоти механічної системи [3], і система керування проведе зміну частоти з певною точністю, але для того щоб амплітуда коливань системи, тепер уже із більшою масою, на новій резонансній частоті залишилася не змінною необхідно проводити автоматичну корекцію амплітуди вимушуючої сили, але дана система керування не може проводити автоматичного регулювання амплітуди вимушуючої сили. - у моменти запуску, розвантаження та довантаження робочого органа ВТМ, механічна коливна система суттєво та різко відходитиме від власної резонансної частоти, що буде причиною зменшення амплітуди сигналу на виході датчика зворотного зв'язку та появи хаотичних коливань у колі зворотному зв'язку, і після підсилення такий сигнал не буде синхронною вимушуючою функцією і не зможе стабілізувати роботу ВТМ на новій власній резонансній частоті, тому це буде причиною затухання ВТМ, отже пристрої керування електромагнітним віброприводом такого типу є не стійкими та не стабільними в моменти запуску, розвантаження та довантаження робочого органа АВТМ. Найбільш близьким за технічною суттю є пристрій [4], у якому для керування електромагнітним віброприводом адаптивних вібраційних технологічних машин, який складається із робочого органа з вібродатчиком, що встановлений на пружній системі та електромагнітного віброприводу який з'єднаний із блоком керування, що виконаний у вигляді промислового мікроконтролера із зашитою програмою корекції параметрів коливного руху та пов'язаний через інтерфейс із перетворювачем частоти, який забезпечує живлення електромагнітного віброприводу двополярною широтноімпульсно модульованою напругою. Такий пристрій дозволяє автоматизувати процес керування роботою адаптивних вібраційних технологічних машин, за рахунок регульовання одночасно двох параметрів - частоти та амплітуди, що дозволяє 90820 4 забезпечити оптимальні режими роботи при мінімальних затратах енергії на вібропривод. Недоліком даного пристрою є те, що програмне забезпечення яке реалізовує корекцію параметрів коливного руху АВТМ базується на покроковому принципі [5] пошуку екстремуму амплітудночастотної характеристики (АЧХ) АВТМ. Пристрої керування такого типу вираховують приріст керованої величини [5, 6, 7] і за допомогою певних законів генерують керуючий вплив на вібропривод. Якщо АВТМ працювала на вершині максимуму АЧХ АВТМ і відбулась зміна маси завантаження робочого органу на певну величину то за приростом амплітуди коливань робочого органу неможливо визначити напрям зміни маси робочого органу, тому пристрої та системи такого типу роблять пробну корекцію, у даному випадку це зміна циклічної частоти віброприводу і за реакцією механічної коливної системи АВТМ визначають напрям переміщення власної резонансної частоти АВТМ при новій масі завантаження робочого органу. Маючи інформацію про напрям зміни власної резонансної частоти АВТМ, даний пристрій починає проводити корекцію циклічної частоти віброприводу у необхідну сторону за певним законом керування, аж до моменту коли у АВТМ виникне обернена реакція на приріст циклічної частоти віброприводу. Тобто, коли на зміну циклічної частоти віброприводу у певну сторону, виникає додатний приріст амплітуди коливань система виконує таку корекцію, а як тільки виникає зменшення амплітуди при тому ж самому напрямі приросту циклічної частоти віброприводу, пристрій зупиняє корекцію циклічної частоти віброприводу. Отже даний пристрій керування АВТМ затрачає додатковий час на встановлення напряму зміни власної резонансної частоти АВТМ і це є причиною того, що АВТМ протягом цього часу знаходиться на режимах роботи які є енергетичне невигідними. Метою винаходу є розширення функціональних можливостей адаптивних вібраційних технологічних машин, та економія електроенергії яка витрачається на вібропривод. Поставлена мета досягається тим, що в пристрої для керування електромагнітним віброприводом адаптивних вібраційних технологічних машин, який включає коливну масу (робочий орган) із вібродатчиком встановлену на пружній системі і електромагнітний вібратор, з'єднаний із блоком керування, згідно винаходу, блок керування виконаний у вигляді двох контурів: первинного, який складається із підсилювача потужності реалізованого на базі широтно-імпульсної модуляції, детектора зсуву фаз, елемента порівняння зсуву фаз, задавача зсуву фаз та регулятора частоти циклічної вимушуючої сили та вторинного який складається із елемента завдання технологічнооптимальних параметрів коливань робочого органу, елемента синтезу необхідного значення амплітуди коливань робочого органу, елемента порівняння амплітуди, регулятора амплітуди циклічної вимушуючої сили електромагнітного віброприводу та підсилювача реалізованого на базі широтноімпульсної модуляції, причому вихід вібродатчика з'єднаний із входами детектора зсуву фаз, елеме 5 нтом синтезу необхідного значення амплітуди коливань та елементом порівняння амплітуди, другий вхід детектора зсуву фаз з'єднаний із елементом підсилення на базі широтно-імпульсної модуляції, а вихід із входом блока порівняння зсуву фаз, другий вхід якого з'єднаний із задавачем зсуву фаз, вихід елемента порівняння зсуву фаз з'єднаний із входом регулятора частоти циклічної вимушуючої сили, вихід якого з'єднаний із підсилювачем на базі широтно-імпульсної модуляції, у свою чергу два інші входи елемента синтезу необхідного значення амплітуди коливань робочого органу з'єднані із елементом завдання технологічно-оптимальних параметрів коливань робочого органу а вихід із другим входом елемента порівняння амплітуди, вихід якого з'єднаний із входом регулятора амплітуди циклічної вимушуючої сили, вихід якого з'єднаний із підсилювачем на базі широтно-імпульсної модуляції, вихід підсилювача з'єднаний із електромагнітним віброприводом. Інформація від датчика вібрації надходить на вхід детектора зсуву фаз, на інший вхід якого поступає сигнал від підсилювача реалізованого на базі широтно-імпульсної модуляції (ШІМ) [8, 9, 10], підсилювач на базі ШІМ підсилює сигнал від двох регуляторів частоти та амплітуди циклічної вимушуючої сили віброприводу, регулятор частоти [1114] циклічної вимушуючої сили віброприводу з'єднано із елементом порівняння зсуву фаз, що порівнює існуючий зсув фаз, інформацію про який він отримує від детектора зсуву фаз, між циклічною збурюючою силою електромагнітного віброприводу та вібропереміщенням робочого органу АВТМ із наперед заданим значенням зсуву фаз рівним /2 і за величиною різниці регулятор частоти циклічної вимушуючої сили віброприводу проводить корекцію [11-14] частоти вимушуючої сили електромагнітного віброприводу, в сторону зведення даної різниці до нуля ( 0) так щоб амплітуда коливань робочого органа адаптивної вібраційної технологічної машини постійно відставала на кут /2 [15, 16] від амплітуди циклічної вимушуючої сили електромагнітного віброприводу, регулятор амплітуди [11-14] циклічної вимушуючої сили віброприводу з'єднано із елементом порівняння амплітуди на вхід якого надходить інформація про рівень амплітуди від датчика вібрації, що розміщений на робочому органі АВТМ, та від елемента синтезу, який за заданими технологічно оптимальними параметрами вібраційного поля і новій власній частоті коливань АВТМ, що отримана від датчика вібрації, визначає нове необхідне значення рівняння амплітуди коливань робочого органу АВТМ на новій власній частоті АВТМ і подає цю інформацію до елемента порівняння амплітуди де вона порівнюється із реальною і за її різницею, регулятор амплітуди циклічної вимушуючої сили віброприводу проводить корекцію [11-14] амплітуди F p вимушуючої сили віброприводу. Така конструкція пристрою керування покращує якісні характеристики керування, а саме швидкодію системи (її реакцію на зміну маси заванта 90820 6 ження робочого органа) завдяки переходу від покрокового пошукового алгоритму роботи для визначення максимуму амплітудно-частотної характеристики (АЧХ) АВТМ до слідкуючого принципу роботи і дозволяє із бігом часу відслідковувати зсув фаз між циклічною вимушуючою силою електромагнітного віброприводу та вібропереміщенням робочого органу АВТМ і за допомогою автоматичної корекції частоти циклічної вимушуючої сили електромагнітного віброприводу забезпечувати відставання фази коливань [15, 17] робочого органу АВТМ від коливань циклічної вимушуючої сили на кут рівний /2, що необхідно для забезпечення постійного резонансного режиму роботи АВТМ при різних або змінних масах завантаження робочого органу та підтримання оптимальних із точки зору енергоспоживання параметрів коливань робочого органу АВТМ. Таке конструктивне виконання даного пристрою дозволяє забезпечити мінімальний енергозатрати на електромагнітний вібропривод при постійному резонансному режимі роботи, а також дозволяє забезпечити задані технологічно оптимальні параметри вібраційного поля при змінній власній резонансній частоті АВТМ (відповідно до зміни маси робочого органу). Отже даний пристрій дозволяє забезпечити мінімальні енергозатрати на вібропривод при оптимальних параметрах коливань робочого органу із технологічної точки зору. На Фіг.1 зображено функціональну схему пристрою для керування електромагнітним віброприводом двох масової АВТМ. Двох масова АВТМ 1 складається із реактивної маси 2 та активної маси 3 (робочого органу АВТМ), яка встановлена на пружній системі 4, що закріплена на реактивній масі 2. Електромагнітний вібропривод АВТМ складається із прикріпленого до активної маси 3 якоря 5, та котушки з осердям 6, що встановлена на реактивній масі 2. На робочому органі АВТМ, який є активною масою 3 закріплено датчик вібрації 7, що з'єднаний із входом детектора зсуву фаз 8, елементом синтезу 9 та елементом порівняння амплітуди 10. Вихід елемента синтезу 9 з'єднано із елементом порівняння амплітуди 10. Вихід детектора зсуву фаз 8 з'єднаний із входом елемента порівняння зсуву фаз 11, а на другий вхід елемента порівняння зсуву фаз 11 надходить задане значення зсуву фаз від задавача 12. Вихід елемента порівняння частоти 11 з'єднаний із регулятором частоти циклічної збурюючої сили 13, а вихід елемента порівняння амплітуди 10 - із регулятором амплітуди циклічної збурюючої сили 14. Виходи елементів 13 та 14 з'єднані із входом підсилювача 15, що реалізований на базі широтно-імпульсної модуляції, вихід якого з'єднаний із другим входом детектора зсуву фаз 8 та котушкою з осердям 6 електромагнітного віброприводу АВТМ 1. Два інші входи елемента синтезу 9 з'єднані із елементом завдання технологічно-оптимальних параметрів коливань робочого органу АВТМ 16. Принцип роботи пристрою наступний: інформація про коливання АВТМ 1 від датчика вібрації 7 у вигляді електричного сигналу [8] надходить на вхід детектора зсуву фаз 8, а на другий вхід даного детектора надходить сигнал від підсилювача 7 потужності 15, який живить електромагнітний вібропривод АВТМ (котушку з осердям 6 віброприводу). Сила, яку розвиває електромагнітний вібропривод, F залежить від геометричних параметрів електромагнітного віброприводу [17] та прямо пропорційна струму тобто сигналу на виході підсилювача 15. Отже, на два входи детектора зсуву фаз одночасно надходять: сигнал, що прямо пропорційний циклічній збурюючій силі F, та сигнал прямо пропорційний коливанням механічної коливної системи (АВТМ 1), на виході детектора зсув фаз 8 формується сигнал який пропорційний зсуву фаз між двома цими коливаннями. Враховуючи, що при резонансних коливаннях зсув фаз між циклічною вимушуючою силою F та коливаннями робочого органу, рівний /2 (90 ) [15, 16, 17], можна за величиною та знаком сигналу (кута ) визначити на скільки і в яку сторону механічна коливна система АВТМ 1 відійшла від резонансу. Тому сигнал із виходу детектора зсуву фаз 8 надходить до елемента порівняння 14 де визначається відповідність умови резонансу АВТМ: = /2 і на виході елемента порівняння появляється сигнал, величина якого вказує на величину відходження режиму роботи АВТМ відрезонансного, а знак на напрям відходження. Цей сигнал поступає в регулятор частоти циклічної збурюючої сили 13 де на підставі класичних законів теорії автоматичного управління (пропорційного, диференційного, інтегруючого ...) [11-14] формується закон за яким проводиться корекція частоти циклічної вимушуючої сили електромагнітного віброприводу АВТМ . Наприклад: якщо завдяки зміні приведеної маси змінилась резонансна частота АВТМ, яка рівна [18]: 1 C (1) , 2 M де С - жорсткість пружної системи АВТМ; М - приведена маса АВТМ, що рівна: ma mr M , (2) ma mr де ma - активна маса 3 (маса робочого органу); mr - реактивна маса 2. Отже зростання маси робочого органу 3 призводить до зростання приведеної маси М, а це в свою чергу є причиною того, що власна резонансна частота АВТМ – f зменшиться на певну величину і механічна коливна система АВТМ 1 відійде від резонансу, а кут зсуву фаз стане, наприклад, рівним =91 , тому необхідно проводити корекцію частоти циклічної вимушуючої сили в сторону зменшення (- ) аж доти поки не стане рівним 90 , а якщо наприклад, кут зсуву фаз стане рівним =89 то корекцію частоти циклічної вимушуючої сили необхідно проводити в сторону її збільшення аж поки знову не стане рівним 90 . Підсилювач 15 підсилює відкоректований елементом 13 сигнал і постійно забезпечує АВТМ 1 синусоїдальною вимушуючою силою, частота якої р постійно відповідатиме власній резонансній частоті АВТМ при будь-якому завантажені робочого органу 3. Таким чином елементи 7, 8, 11, 12, 13 та 15 складають один контур керування, що корекf 90820 8 тує частоту вимушуючої сили електромагнітного віброприводу наближуючи та утримуючи її в межах власної резонансної частоти АВТМ 1. Елементи 7, 9, 10, 14, 15 та 16 являють собою другий контур керування, який призначений для забезпечення підтримки технологічно оптимальних параметрів коливань робочого органу 3 на заданому користувачем (оператором) рівні. Цей контур керування є вторинним і проводить корекцію амплітуди вимушуючої сили електромагнітного віброприводу на кожній новій власній резонансній частоті АВТМ 1 підтримуючи питому роботу вібраційного поля АВТМ на заданому технологічно оптимальному рівні. Первинним є контур керування частотою електромагнітного віброприводу який забезпечує резонансний режим роботи та мінімальні енергозатрати на вібропривод, а вторинний контур лише проводить оптимізацію параметрів вібраційного поля з метою дотримання технологічних оптимальних параметрів роботи АВТМ 1. Вторинний контур керування амплітудою коливань робочого органу 3 АВТМ 1 працює таким чином: сигнал пропорційний руху робочого органу 3 поступає від датчика вібрації 7 у елемент синтезу 9 та елемент порівняння 10. Елемент синтезу 9 призначений для визначення необхідної величини амплітуди коливань робочого органу 3 АВТМ на будь-якій частоті (в даному випадку на власній резонансній АВТМ) виходячи із умови точності дотримання технологічних режимів роботи АВТМ. Якщо, наприклад, необхідно підтримувати незмінною технологічно оптимальну інтенсивність віброобробки (питому роботу вібраційного поля) на кожній новій резонансній частоті АВТМ, що рівна [18, 19, 20]: Ароб=a2 2 (3) де - частота коливань робочого органу 3 АВТМ 1; а - амплітуда коливань робочого органу 3 АВТМ 1. Враховуючи вираз (3), в елементі синтезу 9 даного пристрою визначається значення необхідного рівня амплітуди робочого органу АВТМ, виходячи із наступної умови: 2 (4) an 2 a 2 2 , z z d де an - необхідне значення амплітуди коливань робочого органу АВТМ; аz - задане технологічно оптимальне значення амплітуди коливань робочого органу 3 АВТМ 1; z - задане технологічно оптимальне значення частоти коливань робочого органу ЗАВТМ 1; d - дійсна власна резонансна частота АВТМ 1 під час віброобробки при певній (змінній) масі завантаження робочого органу 3. Таким чином у елементі синтезу 9 даного пристрою відбувається співставлення двох параметрів: дійсної амплітуди коливань робочого органу АВТМ (на резонансній частоті) та значення амплітуди коливань робочого органу АВТМ на даній резонансній частоті яке необхідне для того щоб вібраційне поле виконувало задану питому роботу і виробляється сигнал амплітуда якого пропорційна величині відходження амплітуди коливань робочого органу 3 від його технологічно оптимально 9 90820 го значення, а знак даного параметру вказує напрям відходження: an 2 a2 z z . (5) 2 d У результаті порівняння в елементі 10 формується сигнал a, що прямо пропорційний величині відхилення амплітуди коливань робочого органу вібромашини від технологічно оптимального значення для даної частоти віброобробки, який подається у регулятор амплітуди циклічної збурюючої сили 14 де проводиться корекція амплітуди циклічної збурюючої сили електромагнітного віброприводу F p , що напрямлена на те щоб звести параметр a на виході елемента 10 до нуля ( a=0) [11-15]. Така корекція ( F p ) здійснюється пос тійно, як і корекція яка напрямлена на те, щоб підтримувати постійним в часі співвідношення = /2. Реалізація такого пристрою керування роботою АВТМ на базі промислових мікроконтролерів дозволить спростити систему керування (пристрій) до 3-х елементів: промислового мікроконтролера, Ш1М підсилювача 15, датчика вібрацій 7, а також безпосередньо керованого об'єкту - АВТМ 1 та мінімізувати капітальні затрати та енергозатрати на вібропривод при оптимальних параметрах вібраційного поля а також підвищити надійність роботи АВТМ внаслідок зменшення кількості елементів у пристрої керування. Джерела інформації: 1. Устройство для управления вибродвигателем: А.с. № 967914, СССР, МКИ В 65 G 27/24 А. И. Некрасов, А.Н. Макаров, В. С. Проходцев. - 1981, Бюл. - № 39, - 2с. 2. Электромагнитный вибропривод питателя: А.с. № 776961, СССР, МКИ В 65 G 27/24, Л. П. Рыбак, А. П. Шовкун. - 1980; Бюл. - № 41, - 2 с. 3. Лавендал Э. Э. Вибрации в технике: Справ, в 6 т. - М.: Машиностроение, 1981. - Т.4: Вибрационные процессы и машины. - 510 с. 4. Пат. 10123 А Україна, B65BG27/24. Пристрій для керування електромагнітним віброприводом. П. С. Берник, Р. В. Чубик, В. А. Пашистий. - 2005; Бюл. № 11, 4 ст. 10 5. Чубик Р. В. Адаптивна система керування режимами резонансних вібраційних технологічних машин; Дис... канд. тех. наук. - Львів, 2007. - 266 с. 6. Зайцев Г. Ф. Теория автоматического управления и регулирования. - К.: Вища школа, 1989.-431 с. 7. Бесекерский В. А. Попов Е. П. Теория систем автоматического управления. - СанктПетербург: Профессия, 2004. - 752 с. 8. Добрынин С. А., Фельдман М. С., Фирсов Г. И. Методы автоматизированного исследования вибрации машин. Москва, Машиностроение, 1987, - 225 ст. 9. Сергиенко А. Б., Цифровая обработка сигналов. "Питер" 2003. - 603 ст. 10. Михайлов О. П. Автоматизированный электропривод станков и промышленных роботов: Учебник для вузов. - М.: Машиностроение, 1990. 304 ст. 11. Солодовников В. В., Плотников В. П., Яковлев А. В. Основы теории и элементы систем автоматического регулирования. - М.: Машиностроение, 1985 р. -536с. 12. Бесекерский В. А. Попов Е. П. Теория систем автоматического управления. -СанктПетербург: Профессия, 2004. - 752 с. 13. Лавендел Э. Э. Синтез оптимальных вибромашин. - Рига: Зинатне, 1970. -210с. 14. Куропаткін П. В. Оптимальные и адаптивные системы. - М.: Высш. Школа, 1980. - 287 с. 15. Хайкин С. Э. Физические основы механики. - М.: Наука, 1971. - 751 с. 16. Крюков Б. И. Динамика вибрационных; машин резонансного тина. - К.: Наукова думка, 1997. - 230 с. 17. Повідайло В. О. Вібраційні процеси та обладнання. - Львів: Видавництво НУ "Львівська політехніка", 2004. - 248 с. 18. Шмигальський В. Н. Критерий равноценности вибраций различных частот// Труды НИИЖБ. Гостстройиздат. - М.: 1959. - № 11. - С. 35-41. 19. Сердюк Л. И., Давыденко Ю. А., Осина Л. М. Различные подходы к оценке динамических, энергетических и технологических возможностей вибрационных машин// Вибрации в технике и технологиях. Всеукраїнський науково-технічний журнал. 2004. - № 3 (35) - C. 113-117. 20. Копылов Ю. Р. Амплитудные и фазочастотные характеристики вибрирующей рабочей среды// Вибрации в технике и технологиях. Труды III международной научно-технической конференции. - Евпатория: 1998. - С. 133-137. 11 Комп’ютерна верстка А. Крижанівський 90820 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of electromagnetic vibratory drive of adaptive vibration technology machines
Автори англійськоюSereda Leonid Pavlovych, Chubyk Roman Vasyliovych, Yaroshenko Leonid Viktorovych
Назва патенту російськоюУстройство для управления электромагнитным виброприводом адаптивных вибрационных технологических машин
Автори російськоюСереда Леонид Павлович, Чубик Роман Васильевич, Ярошенко Леонид Викторович
МПК / Мітки
МПК: B65G 27/10
Мітки: пристрій, керування, електромагнітним, адаптивних, вібраційних, технологічних, машин, віброприводом
Код посилання
<a href="https://ua.patents.su/6-90820-pristrijj-keruvannya-elektromagnitnim-vibroprivodom-adaptivnikh-vibracijjnikh-tekhnologichnikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування електромагнітним віброприводом адаптивних вібраційних технологічних машин</a>
Спосіб керування роботою адаптивних вібраційних технологічних машин
Номер патенту: 87776
Опубліковано: 10.08.2009
Автори: Чубик Роман Васильович, Середа Леонід Павлович, Ярошенко Леонід Вікторович
МПК: B65G 27/00
Мітки: технологічних, керування, роботою, спосіб, машин, адаптивних, вібраційних
Формула / Реферат:
Спосіб керування роботою адаптивних вібраційних технологічних машин, при якому система керування віброприводом, відслідковуючи зсув фаз між амплітудою коливань робочого органа адаптивної вібраційної технологічної машини та амплітудою циклічної вимушуючої сили віброприводу, підтримує резонансний режим роботи адаптивної вібраційної технологічної машини, який відрізняється тим, що в процесі роботи адаптивної вібраційної технологічної машини...
Пристрій для керування електромагнітним віброприводом
Номер патенту: 10123
Опубліковано: 15.11.2005
Автори: Берник Павло Степанович, Чубик Роман Васильович, Пашистий Вадим Ананієвич
МПК: B65G 27/10
Мітки: керування, електромагнітним, віброприводом, пристрій
Формула / Реферат:
Пристрій для керування електромагнітним віброприводом, що включає коливну масу (робочий орган) із вібродатчиком, встановлену на пружній системі, і електромагнітний вібратор, з’єднаний із блоком керування, який відрізняється тим, що блок керування виконаний у вигляді промислового мікроконтролера із зашитою програмою корекції параметрів коливного руху та пов'язаний через інтерфейс із перетворювачем частоти з можливістю забезпечення живлення...
Пристрій керування віброприводом
Номер патенту: 36611
Опубліковано: 16.04.2001
Автор: Шаповалов Михайло Якович
МПК: B06B 1/02
Мітки: пристрій, віброприводом, керування
Формула / Реферат:
Пристрій керування віброприводом, що вміщує електромагніт, датчик вібрації, підключений до входу амплітудного детектора, вихід якого підключений до входу блока підсумовування, на вхід якого підключений задатчик амплітуди, підсилювач, вихід якого підключений до входу комутуючого елемента, а останній підключений до одного з виводів електромагніта, а другий вивід електромагніта з'єднаний з джерелом живлення, який відрізняється тим, що введено...
Віброоброблюючий пристрій резонансного типу з дебалансним віброприводом
Номер патенту: 10124
Опубліковано: 15.11.2005
Автори: Чубик Роман Васильович, Пашистий Вадим Ананієвич, Берник Павло Степанович
МПК: B65G 27/10
Мітки: дебалансним, віброприводом, віброоброблюючий, резонансного, типу, пристрій
Формула / Реферат:
Віброоброблюючий пристрій резонансного типу з дебалансним віброприводом, що містить робочий орган і дебалансний вібратор, зв’язані з пружною системою, а також датчик вібрації і блок керування, який відрізняється тим, що блок керування виконаний у вигляді промислового мікроконтролера із зашитою програмою корекції параметрів коливного руху і зв’язаний через інтерфейс із перетворювачем частоти, який виконаний з можливістю живлення електродвигуна...
Привід вібраційних машин
Номер патенту: 42469
Опубліковано: 10.07.2009
Автори: Архангельський Андрій Георгійович, Архангельський Георгій Володимирович
МПК: B07B 1/28
Мітки: привід, вібраційних, машин
Формула / Реферат:
Привід вібраційних машин, що містить електродвигун та кривошипно-шатунний механізм, який відрізняється тим, що двигун жорстко зв'язаний з однією ланкою механізму вільного ходу, а кривошип жорстко зв'язаний з другою ланкою механізму вільного ходу.
Попередній патент: Імпульсна газорозрядна лампа на молекулах йоду
Наступний патент: Роторний двигун
Випадковий патент: Інструмент для радіального кування