Спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах
Номер патенту: 105075
Опубліковано: 10.04.2014
Формула / Реферат
Спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи ![]() , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри: частоту
, підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри: частоту ![]() та амплітуду
та амплітуду ![]() коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує частоту та амплітуду вимушених коливань віброприводу робочого органу до частоти
коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує частоту та амплітуду вимушених коливань віброприводу робочого органу до частоти ![]() , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу, який відрізняється тим, що система керування коректує амплітуду коливань робочого органу
, яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу, який відрізняється тим, що система керування коректує амплітуду коливань робочого органу ![]() на резонансній частоті так, щоб виконувалась наступна умова:
на резонансній частоті так, щоб виконувалась наступна умова:
![]() , де
, де
![]() та
та ![]() задані технологічно оптимальні параметри вібраційного поля адаптивної вібраційної технологічної машини,
задані технологічно оптимальні параметри вібраційного поля адаптивної вібраційної технологічної машини,
![]() - кут нахилу до горизонту робочого органу адаптивної вібраційної технологічної машини,
- кут нахилу до горизонту робочого органу адаптивної вібраційної технологічної машини, ![]() - кут напряму коливань робочого органу адаптивної вібраційної технологічної машини до горизонту.
- кут напряму коливань робочого органу адаптивної вібраційної технологічної машини до горизонту.
Текст
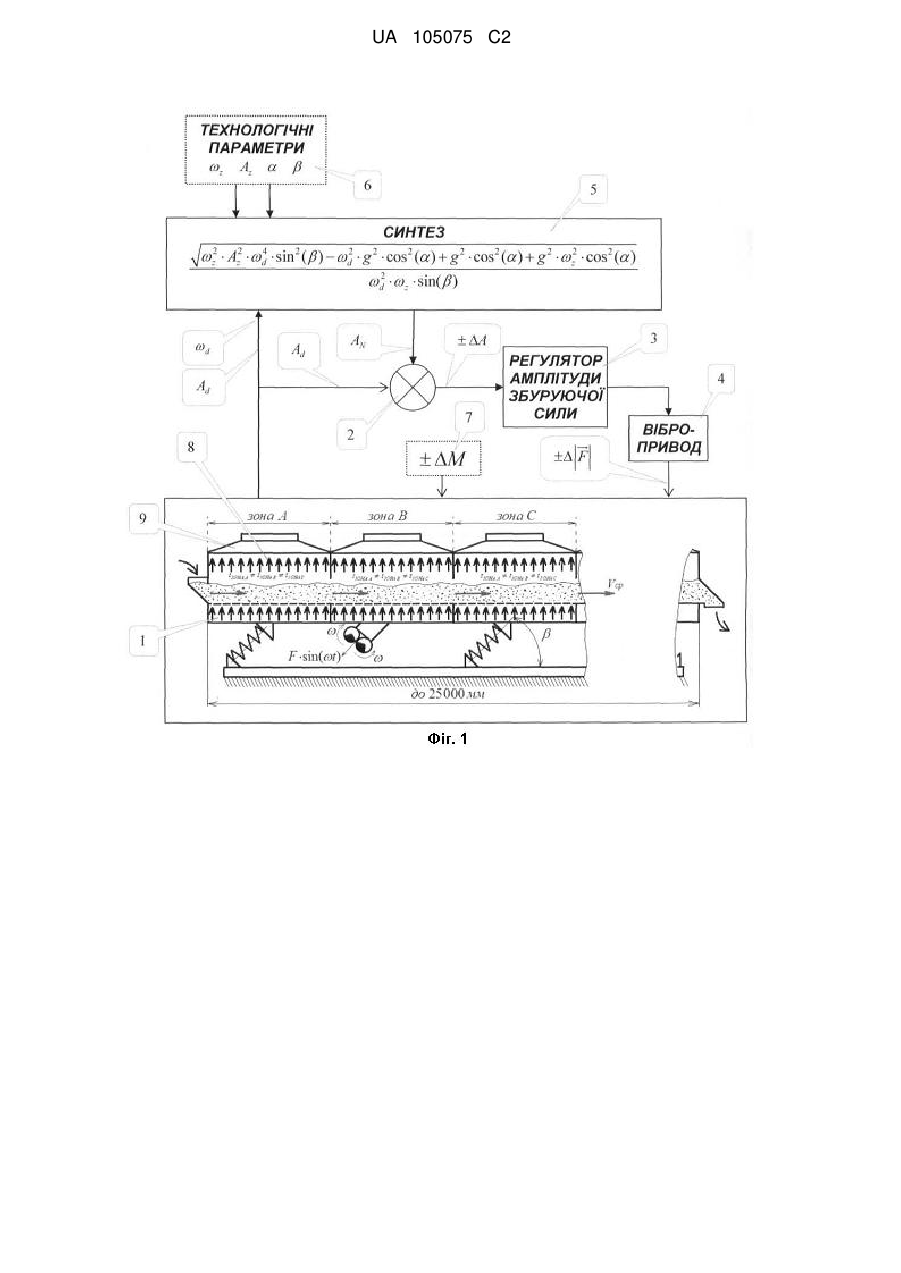
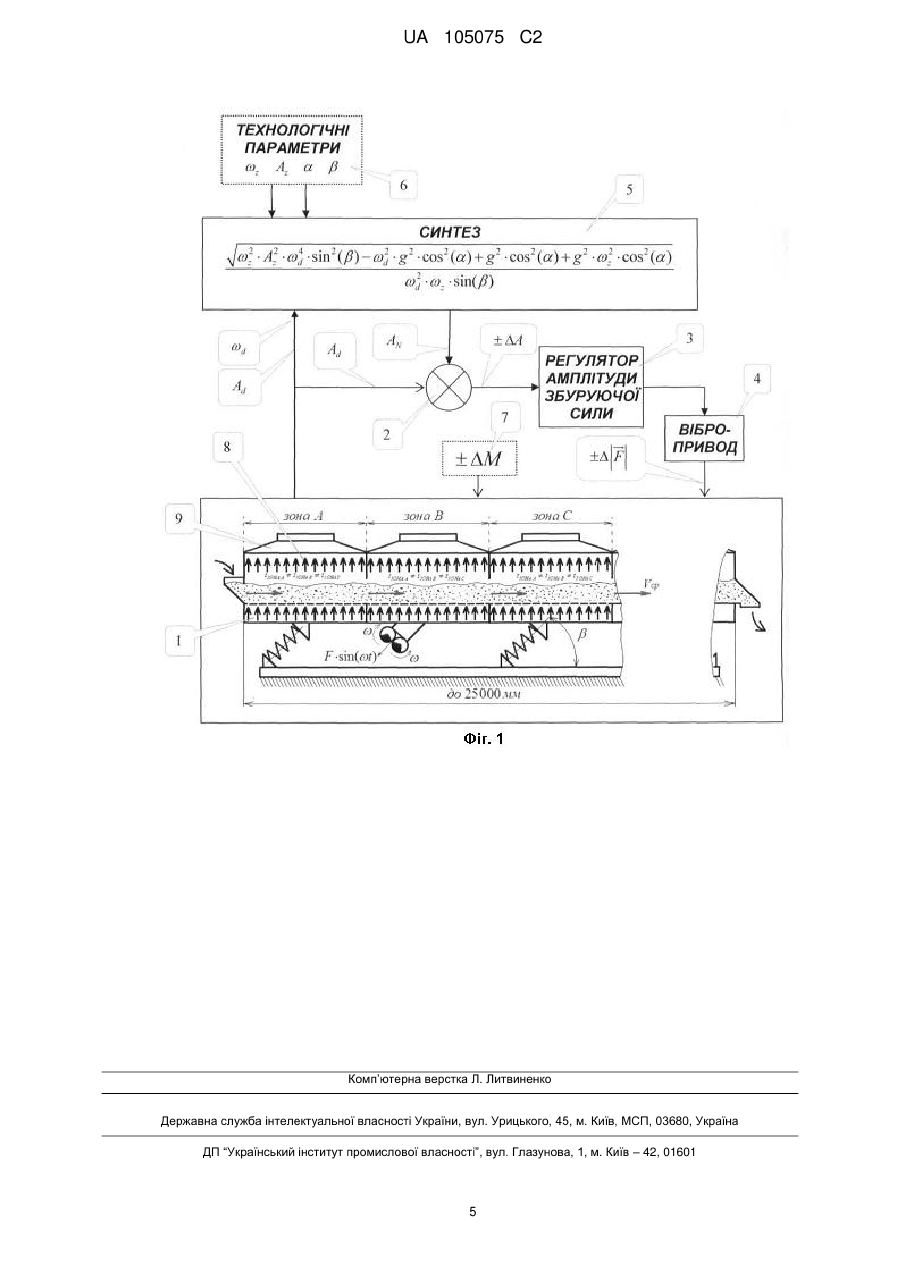
Реферат: Заявлений спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри: частоту d та амплітуду A d коливань робочого органу. У випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує частоту та амплітуду вимушених коливань віброприводу робочого органу до частоти d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу. Система керування коректує амплітуду коливань робочого органу A d на резонансній частоті так, щоб виконувалась наступна умова: Ad 4 2 A 2 d sin 2 () 2 g2 cos 2 () g2 cos 2 () g2 2 cos 2 () z z z z 2 z sin() d , де z та A z задані технологічно оптимальні параметри вібраційного поля адаптивної вібраційної технологічної машини, - кут нахилу до горизонту робочого органу адаптивної вібраційної технологічної машини, кут напряму коливань робочого органу адаптивної вібраційної технологічної машини до горизонту. UA 105075 C2 (12) UA 105075 C2 UA 105075 C2 5 10 15 20 Винахід стосується вібраційної техніки і може знайти застосування в машинобудуванні та приладобудуванні, а також в гірничо-переробній, хімічній, харчовій, будівельній промисловості та сільськогосподарському виробництві. Відомий спосіб керування [1], в якому в процесі роботи адаптивної вібраційної технологічної машини (АВТМ) система керування контролює два параметри - частоту та амплітуду коливань робочого органу і у випадку зміни завантаження робочого органа або при необхідності зміни режиму роботи машини система керування коректує частоту та амплітуду вимушених коливань приводу робочого органу до частоти, яка близька до власної частоти вібромашини при заданому завантаженні робочого органу і амплітуду коливань на резонансній частоті так, щоб вона відповідала оптимальному режиму технологічного процесу. Недоліком такого методу стабілізації технологічних параметрів вібраційного поля АВТМ є те, що один і той же рівень амплітуди коливань робочого органу АВТМ на різних частотах призведе до різної інтенсивності технологічного процесу, що для певних технологічних процесів є недопустимим. Найбільш близьким до заявлюваного за технічною суттю є метод стабілізації технологічно оптимальних параметрів вібраційного поля АВТМ [2], в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи АВТМ близький до резонансного і в процесі роботи АВТМ система керування контролює два параметри - частоту d та амплітуду A d коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи АВТМ система керування коректує частоту та амплітуду вимушених коливань віброприводу робочого органу, до частоти d яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу і амплітуду коливань робочого органу 2 2 A d на резонансній частоті так, щоб виконувалась умова A d z A z 25 30 35 40 45 , де z та A z задані технологічно оптимальні параметри вібраційного поля АВТМ. Недоліком такого методу стабілізації технологічних параметрів вібраційного поля АВТМ є те, що застосування питомої роботи вібраційного поля є доцільним та експериментально доведеним критерієм в роботах [3, 4, 5] для якісної та кількісної оцінки лише технологічних процесів, що пов'язані із віброабразивною обробкою деталей, а для АВТМ в процесі роботи яких здійснюється вібротранспортування даний критерій використовувати не можливо. В основу винаходу поставлено задачу шляхом зміни залежності амплітуди коливань робочого органу АВТМ від частоти коливань забезпечити підвищення точності дотримання технологічних режимів роботи адаптивних вібраційних технологічних машин, в процесі роботи яких здійснюється горизонтальне вібротранспортування. Поставлена задача вирішується тим, що у методі стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи адаптивної вібраційної технологічної машини близький до резонансного і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри - частоту d та амплітуду A d коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує частоту та амплітуду вимушених коливань віброприводу робочого органу, до частоти d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу і згідно з винаходом система керування коректує амплітуду коливань робочого органу A d на резонансній частоті так, щоб виконувалась наступна умова 4 2 A 2 d sin2 () 2 g2 cos2 () g2 cos2 () g2 2 cos2 () z z z z , де z та A z задані 2 z sin() d технологічно оптимальні параметри вібраційного поля адаптивної вібраційної технологічної машини, - кут нахилу до горизонту робочого органу адаптивної вібраційної технологічної машини, - кут напряму коливань робочого органу адаптивної вібраційної технологічної машини до горизонту. Такий метод стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах базується на забезпечені рівності (стабільності) в часі Ad 50 2 d 1 UA 105075 C2 середньої швидкості вібротранспортування Vcep [6] при будь-якому завантаженні робочого органу на робочій частоті АВТМ: Vcep k A z z cos() 1 5 10 15 20 25 g2 cos2 () A 2 4 sin2 () z z ,(1) 2 де A z z sin( ) - коефіцієнт перевантаження (режиму), k - довідковий коефіцієнт, що g cos( ) залежить від характеристик транспортованого матеріалу. Даний метод дозволяє постійно підтримувати резонансний режим роботи АВТМ завдяки корекції d , а при резонансній частоті АВТМ проводиться стабілізація швидкості горизонтального вібротранспортування шляхом корекції амплітуди коливань робочого органу A d , що забезпечує мінімальні енергозатрати на вібропривод при незмінному оптимальному значенні технологічних параметрів АВТМ. На фіг. 1 зображено функціональну схему методу стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах. На адаптивну вібраційну технологічну машину 1 діє параметричне збурення 7, робочий орган 9 якої поділено на кілька технологічних зон, що відрізняються технологічними умовами та параметрами впливу на сипучий матеріал (потужністю інфрачервоного випромінювання для нагрівання віброкипучого шару, температурою газу 8, яка різна для кожної зони або іншого технологічного реагенту, яким обробляється сипучий матеріал при реалізації певної технології). АВТМ 1 з'єднана із блоком порівняння 2 та блоком синтезу 5, який з'єднаний із блоком 6 введення технологічно оптимальних параметрів вібраційного поля. Сигнал з виходу блока синтезу 5 надходить на блок порівняння 2, а з виходу блока порівняння 2 надходить у регулятор амплітуди збурюючої циклічної сили 3 і з його виходу надходить на вібропривод 4, що приводить у рух АВТМ 1. У ході роботи АВТМ 1 за допомогою блока 6 проводиться ввід заданого технологічно оптимального значення швидкості вібротранспортування Vcep шляхом введення заданих динамічних параметрів робочого органу 9 частоти z і амплітуди A z АВТМ 1 та геометричних характеристик , . Швидкість вібропереміщення та характер траєкторії частинок транспортованого сипкого середовища залежать [6, 7] від параметрів вібраційного впливу, зокрема кутів напряму коливань (в середньому даний кут у вібромашинах складає від 18 70 , збільшення кута напряму коливань знижує швидкість вібротранспортування і покращує перемішування частинок у шарі сипучого матеріалу) та кута нахилу робочого органу 30 35 ( 00 для вказаного на фіг. 1 випадку, а зазвичай він складає 8 10 , при збільшені кута підйому робочого органу на один градус швидкість вібротранспортування для зернистих матеріалів зменшується на 2-5 %, а при зменшенні на один градус - збільшується на 3-10 %), фізичних властивостей матеріалу, висоти шару сипучого матеріалу, напряму та швидкості руху газу Vгазу 8 (або іншого технологічного реагенту), яким обробляється сипучий матеріал та ще ряду факторів, що безпосередньо залежать від типу реалізовуваної технології у даній АВТМ. Для АВТМ із подачею газу під транспортований сипучий матеріал в роботі [7] наведено дані експериментальних досліджень промислових вібросушарок, де встановлено, що швидкість вібротранспортування Vв іброгазу сипучого матеріалу при одночасній подачі газу під його шар визначається емпіричною залежністю: Vвіброгазу Vcep 2.4 ( Vгазу / Vкр )1.7 , 40 де Vгазу - швидкість газу, яка рівна його витраті, віднесеній до площі газорозподільної решітки, Vкр - швидкість газу при початку псевдорозрідження шару сипучого матеріалу. Враховуючи той факт, що площі газорозподільної решітки та розхід газу в кожній зоні однаковий, то швидкість вібротранспортування Vв іброгазу сипучого матеріалу при одночасній 45 подачі газу під його шар буде визначатися тільки конструкцією самого робочого органу та його динамічними параметрами - тобто Vcep . Тому у АВТМ, що застосовують для реалізації чи інтенсифікації певних технологічних процесів горизонтальне вібропереміщення, стабілізацію технологічно оптимальних параметрів можна проводити або зміною геометричних характеристик , , або зміною динамічних параметрів робочого органу 9 частоти z і 2 UA 105075 C2 5 10 15 амплітуди A z . Зміна геометричних параметрів АВТМ не є завжди можливою та зручною через те, що АВТМ в процесі реалізації певної технології пов'язана з іншими допоміжними та взаємопов'язаними вібромашинами. Тому оптимальною є зміна динамічних параметрів робочого органу 9 АВТМ 1. При дії на АВТМ 1 параметричного збурення 7 (зміна маси завантаження робочого органу ±ΔМ), змінюється власна резонансна частота АВТМ 1, що призводить до зміни амплітуди коливань робочого органу АВТМ 1, яка зумовлена переміщенням амплітудно-частотної характеристики (АЧХ) АВТМ по осі частот у ту чи іншу сторону залежно від напряму зміни параметричного збурення 7 (±ΔМ). Для корекції АЧХ застосовується зміна частоти циклічної вимушуючої сили віброприводу з метою забезпечення постійного резонансного режиму роботи АВТМ, у результаті чого виникає зміна технологічно оптимального параметрів вібраційного поля, насамперед частоти, із заданої z на нову дійсну d власну резонансну частоту АВТМ 1. Враховуючи нову власну резонансну частоту АВТМ 1 d та технологічно оптимальні параметри вібраційного поля АВТМ z та A z в блоці синтезу 5 проходить розрахунок необхідного значення амплітуди коливань робочого органу АВТМ AN при новій дійсній власній резонансній частоті АВТМ d так, щоб оптимальне значення швидкості вібротранспортування Vcep залишилось незмінним при новому дійсному значенні d власної резонансної частоти АВТМ 1. Тобто в блоці синтезу 5 проходить визначення необхідного значення амплітуди коливань робочого органу АВТМ AN виходячи із рівності: k A z z cos() 1 20 g2 cos2 () k AN d cos() 1 g2 cos2 () . A 2 4 sin2 () A 2 4 sin2 () z z z z Необхідне значення амплітуди коливань робочого органу AN , яке забезпечує задане технологічно оптимальне значення швидкості вібротранспортування Vcep при даній масі завантаження робочого органу, надходить на блок порівняння 2. У блоці порівняння 2 проходить порівняння необхідного значення AN амплітуди коливань робочого органу та 25 30 35 40 45 50 дійсного значення амплітуди коливань робочого органу A d і значення необхідної різниці амплітуд коливань робочого органу ±ΔА подається на регулятор амплітуди збурюючої циклічної сили 3, де на підставі величини похибки ±ΔА та розроблених оптимальних законів керування формується керуючий сигнал на вібропривід 4. Вібропривід 4 змінює значення амплітуди циклічної вимушеної сили віброприводу в необхідну сторону та на необхідну величину F і діє на АВТМ 1. В результаті зворотного зв'язку по d та A d даний метод стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах дозволяє постійно підтримувати технологічно оптимальні параметри вібраційного поля в процесі зміни маси завантаження робочого органу адаптивних вібраційних технологічних машин. Джерела інформації:: 1. Пат. 10971 А Україна, B65BG27/24. Спосіб керування роботою машини із коливними рухами робочих органів. П.С. Берник, Р.В. Чубик, В.А. Пашистий. (Україна). -№ 200502375; Опубл. 15.12.2005; Бюл. № 12, 4 с. 2. Пат. 92041 А Україна, B65G27/100. Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин. Середа Л.П., Чубик Р.В., Ярошенко Л.В. (Україна). - № а200806209; Опубл. 27.09.2010; Бюл. № 18, 3 с. 3. Сергеев А.П. Исследование процесса обработки, механизация и автоматизация вспомогательных работ на машинах для объемной вибрационной обработки// Механизация процесса снятия заусенцев. МДНТП. - М.: 1966. - С.74-85. 4. Сердюк Л.И., Давыденко Ю.А., Осина Л.М. Различные подходы к оценке динамических, энергетических и технологических возможностей вибрационных машин // Вибрации в технике и технологиях. Всеукраїнський науково-технічний журнал. - 2004. - № 3 (35) -С. 113-117. 5. Копылов Ю.Р. Амплитудные и фазо-частотные характеристики вибрирующей рабочей среды// Вибрации в технике и технологиях. Труды III международной научно-технической конференции. - Евпатория, 1998. - С. 133-137. 6. Ланець О.С. Високоефективні між резонансні вібраційні машини з електромагнітним приводом (Теоретичні основи та практика створення): Монографія. -Львів: Видавництво НУ "Львівська політехніка", 2008. - 324 с. 3 UA 105075 C2 7. Членов В.А., Михайлов Н.В. Виброкипящий слой. – М.: Наука, 1972. - 341 с. ФОРМУЛА ВИНАХОДУ 5 Спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри: частоту d та 10 амплітуду A d коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує частоту та амплітуду вимушених коливань віброприводу робочого органу до частоти d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу, який відрізняється тим, що система керування коректує амплітуду коливань робочого органу A d на резонансній частоті так, щоб виконувалась наступна умова: 15 Ad 20 4 2 A 2 d sin 2 () 2 g2 cos 2 () g2 cos 2 () g2 2 cos 2 () z z z z 2 z sin() d , де z та A z - задані технологічно оптимальні параметри вібраційного поля адаптивної вібраційної технологічної машини, - кут нахилу до горизонту робочого органу адаптивної вібраційної технологічної машини, кут напряму коливань робочого органу адаптивної вібраційної технологічної машини до горизонту. 4 UA 105075 C2 Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюChubyk Roman Vasyliovych, Yaroshenko Leonid Viktorovych
Автори російськоюЧубик Роман Васильевич, Ярошенко Леонид Викторович
МПК / Мітки
МПК: B65G 27/24
Мітки: вібротранспортування, горизонтального, машинах, стабілізації, адаптивних, технологічних, вібраційних, спосіб, швидкості
Код посилання
<a href="https://ua.patents.su/7-105075-sposib-stabilizaci-shvidkosti-gorizontalnogo-vibrotransportuvannya-v-adaptivnikh-vibracijjnikh-tekhnologichnikh-mashinakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах</a>
Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин

Номер патенту: 92041
Опубліковано: 27.09.2010
Автори: Середа Леонід Павлович, Ярошенко Леонід Вікторович, Чубик Роман Васильович
МПК: B65G 27/00
Мітки: параметрів, спосіб, технологічної, адаптивних, технологічних, стабілізації, вібраційних, машин, вібраційного, оптимальних, поля
Формула / Реферат:
Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи wd, підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, який відрізняється тим, що в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два...
Спосіб керування роботою адаптивних вібраційних технологічних машин
Номер патенту: 87776
Опубліковано: 10.08.2009
Автори: Середа Леонід Павлович, Чубик Роман Васильович, Ярошенко Леонід Вікторович
МПК: B65G 27/00
Мітки: вібраційних, роботою, спосіб, керування, адаптивних, машин, технологічних
Формула / Реферат:
Спосіб керування роботою адаптивних вібраційних технологічних машин, при якому система керування віброприводом, відслідковуючи зсув фаз між амплітудою коливань робочого органа адаптивної вібраційної технологічної машини та амплітудою циклічної вимушуючої сили віброприводу, підтримує резонансний режим роботи адаптивної вібраційної технологічної машини, який відрізняється тим, що в процесі роботи адаптивної вібраційної технологічної машини...
Пристрій керування електромагнітним віброприводом адаптивних вібраційних технологічних машин
Номер патенту: 90820
Опубліковано: 25.05.2010
Автори: Ярошенко Леонід Вікторович, Середа Леонід Павлович, Чубик Роман Васильович
МПК: B65G 27/10
Мітки: електромагнітним, пристрій, адаптивних, машин, керування, технологічних, віброприводом, вібраційних
Формула / Реферат:
Пристрій для керування електромагнітним віброприводом адаптивних вібраційних технологічних машин, який включає коливну масу (робочий орган) із вібродатчиком, встановлену на пружній системі, і електромагнітний вібратор, з'єднаний із блоком керування, який відрізняється тим, що блок керування виконаний у вигляді двох контурів - первинного, який складається із підсилювача потужності, реалізованого на базі широтно-імпульсної модуляції, детектора...
Привід горизонтального наведення і стабілізації танкового озброєння
Номер патенту: 60908
Опубліковано: 17.04.2006
Автори: Коваленко Олексій Олександрович, Мотуз Георгій Іванович, Бондаренко Олександр Григорович, Корсун Валентин Петрович, Кралін Володимир Всеволодович, Старков Юрій Володимирович, Хандога Анатолій Максимович
МПК: F41G 5/00
Мітки: танкового, горизонтального, стабілізації, привід, озброєння, наведення
Формула / Реферат:
Способ прогнозирования землетрясений основан на оценке персоналом централизованной сети постов прогнозирования сейсмоопасности нервно-эмоционального состояния штатных для этих постов и других сейсмочувствительных животных до и после землетрясений в основном по интенсивности психогенного потоотделения на подошвенной части лапок этих животных. По концентрическому размещению и радиальным размерам разброса по поверхности земли близких по...
Привід горизонтального наведення і стабілізації танкового озброєння
Номер патенту: 60907
Опубліковано: 17.04.2006
Автори: Мотуз Георгій Іванович, Єрдаков Євген Володимирович, Бондаренко Олександр Григорович, Старков Юрій Володимирович, Корсун Валентин Петрович, Кралін Володимир Всеволодович
МПК: F41G 5/00
Мітки: привід, озброєння, наведення, танкового, стабілізації, горизонтального
Формула / Реферат:
1. Чизельний робочий орган, що включає стовбу, лапу, долото, нижній кінець якого розташований нижче площини леза, який відрізняється тим, що поверхня долота виконана криволінійною і розміщена увігнутістю у напрямку руху, а кінець долота виконано трикутним у поперечно-вертикальній площині проекцій.2. Чизельний робочий орган за п. 1, який відрізняється тим, що його долото виконане оборотним.
Попередній патент: Цифровий спосіб вимірювання фазового часу проходження радіоімпульсних сигналів
Наступний патент: Машина для внесення рідких добрив
Випадковий патент: Спосіб нанесення покриття (варіанти)