Спосіб управління польотом коректованого літального апарата
Номер патенту: 10978
Опубліковано: 15.12.2005
Автори: Ляденко Андрій Пилипович, Канєвський Валерій Олександрович, Целінко Олександр Михайлович, Яковенко Петро Олексійович
Формула / Реферат
1. Спосіб управління польотом коректованого літального апарата, який включає запуск безпілотного літального апарата для виходу в район доставки, наведення безпілотного літального апарата на місце доставки, пуск після запуску безпілотного літального апарата іншого безпілотного літального апарата-носія корисного вантажу в район доставки, управління польотом безпілотного літального апарата за допомогою радіокомандної лінії управління за допомогою аналізу зображення з телевізійної камери, розміщеної на безпілотному літальному апараті, формування команд радіонаведення безпілотного літального апарата-носія корисного вантажу на місце доставки за допомогою аналізу параметрів взаємного розташування безпілотного літального апарата-носія корисного вантажу і місця доставки, отриманого з телевізійної камери з використанням ретранслятора сигналів радіокомандної лінії управління, який відрізняється тим, що здійснюють роздільні пуски безпілотного літального апарата і безпілотного літального апарата-носія корисного вантажу, пуск після запуску безпілотного літального апарата іншого безпілотного літального апарата-носія корисного вантажу здійснюють із затримкою, достатньою для формування (не менше за час формування) команд корекції, а ретранслятором сигналів радіокомандної лінії управління забезпечують безпілотний літальний апарат-носій корисного вантажу.
2. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що після запуску безпілотного літального апарата здійснюють пуски групи безпілотних літальних апаратів-носіїв корисного вантажу.
3. Спосіб управління польотом коректованого літального апарата по п. 1, який відрізняється тим, що пуски групи безпілотних літальних апаратів-носіїв корисного вантажу здійснюють одночасно.
4. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що пуски групи безпілотних літальних апаратів-носіїв корисного вантажу здійснюють послідовно.
5. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що пуски групи безпілотних літальних апаратів-носіїв корисного вантажу здійснюють паралельно-послідовно.
6. Спосіб управління польотом коректованого літального апарата за п. 1, і 4 або 5, який відрізняється тим, що час між пусками безпілотних літальних апаратів-носіїв корисного вантажу вибирають виходячи із забезпечення роботи лінії ретрансляції сигналів радіокомандної лінії управління.
7. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що повторно направляють безпілотний літальний апарат-носій корисного вантажу, в якому як вантаж повторно застосовують телевізійну камеру радіокомандної лінії управління.
8. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що як вантаж застосовують надувний плаваючий засіб.
9. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що як додатковий вантаж використовують парашут.
Текст
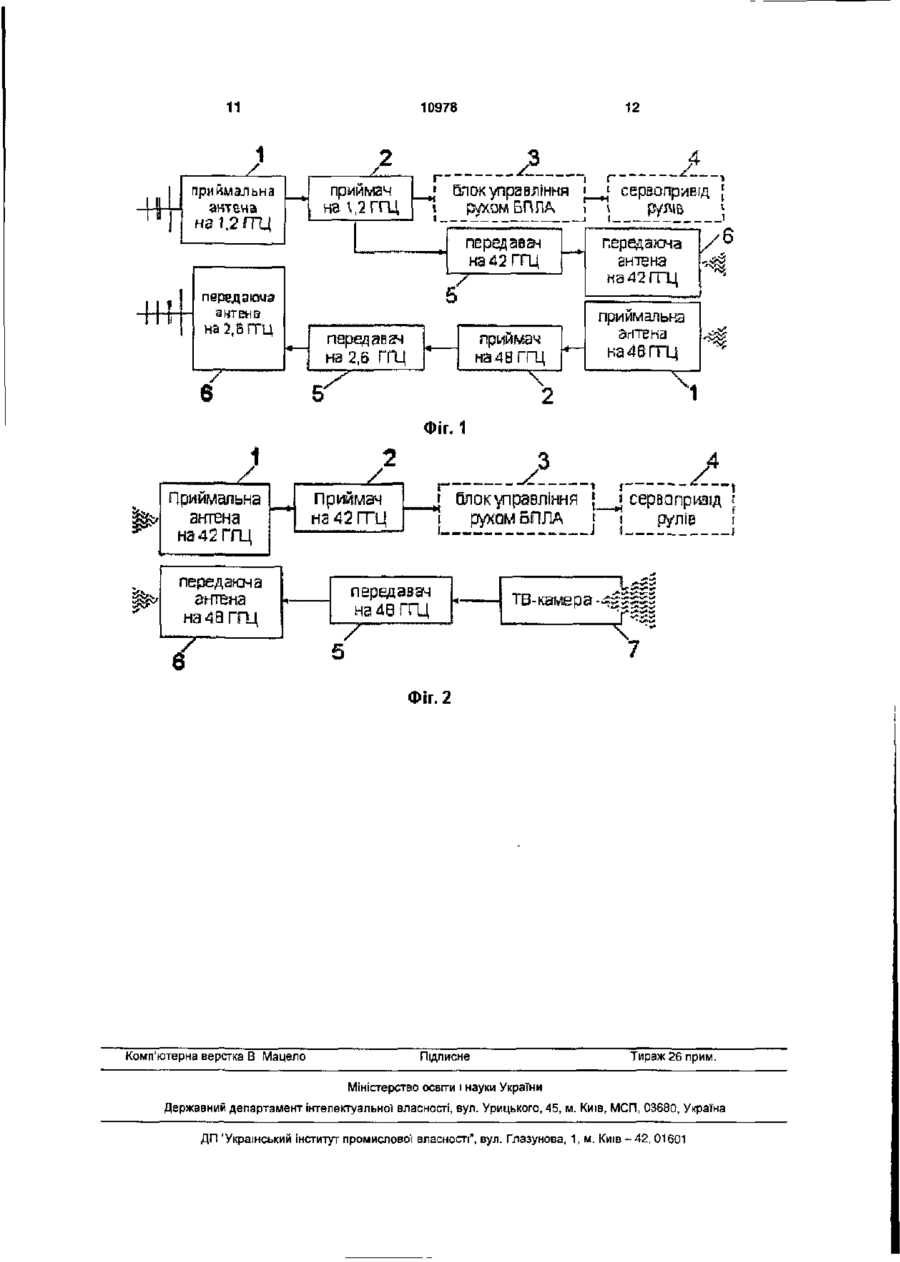
1. Спосіб управління польотом коректованого літального апарата, який включає запуск безпілотного літального апарата для виходу в район доставки, наведення безпілотного літального апарата на місце доставки, пуск після запуску безпілотного літального апарата іншого безпілотного літального апарата-носія корисного вантажу в район доставки, управління польотом безпілотного літального апарата за допомогою раді о командної лінії управління за допомогою аналізу зображення з телевізійної камери, розміщеної на безпілотному літальному апараті, формування команд радіонаведення безпілотного літального апарата-носія корисного вантажу на місце доставки за допомогою аналізу параметрів взаємного розташування безпілотного літального апарата-носія корисного вантажу і місця доставки, отриманого з телевізійної камери з використанням ретранслятора сигналів радіокоманд но і' ЛІНІЇ управління, який відрізняється тим, що здійснюють роздільні пуски безпілотного літального апарата і безпілотного літального апарата-носія корисного вантажу, пуск після запуску безпілотного літального апарата Іншого безпілотного літального апарата-носія корисного вантажу здійснюють із затримкою, достатньою для формування (не менше за час формування) команд корекції, а ретранслятором сигналів радіокомандної лінії управління забезпечують без пілотний літальний апарат-носій корисного вантажу. 2. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що після запуску безпілотного літального апарата здійснюють пуски групи безпілотних літальних апаратів-носіїв корисного вантажу. 3. Спосіб управління польотом коректованого літального апарата по п. 1, який відрізняється тим, що пуски групи безпілотних літальних апаратівносмв корисного вантажу здійснюють одночасно. 4. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що пуски групи безпілотних літальних апаратівносіїв корисного вантажу здійснюють послідовно. 5. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що пуски групи безпілотних літальних апаратіаноси'в корисного вантажу здійснюють паралельнопослідовно. 6. Спосіб управління польотом коректованого літального апарата за п. 1, і 4 або 5, який відрізняється тим, що час між пусками безпілотних літальних апаратів-носіїв корисного вантажу вибирають виходячи із забезпечення роботи лінії ретрансляції сигналів радіокомандної лінії управління. 7. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що повторно направляють безпілотний літальний апарат-носій корисного вантажу, в якому як вантаж повторно застосовують телевізійну камеру радіокомандної лінії управління. 8. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що як вантаж застосовують надувний плаваючий засіб. 9. Спосіб управління польотом коректованого літального апарата за п. 1, який відрізняється тим, що як додатковий вантаж використовують парашут. Спосіб відноситься зокрема до засобів виявлення потерпілого або районів стихійних лих і екс треної доставки корисного вантажу до нього і може бути застосований при проведенні робіт пов'яза 00 о О) них з порятунком людей в важкодоступних районах, а також для доставки різних вантажів в важкодоступний райони зокрема райони стихійних лих, аварій, геологорятувальних і геологорозвідувальних робіт, для ліквідації яких-небудь перешкод і заторів в екстремальних ситуаціях, при стихійних лихах. Відомий спосіб управління польотом коректованого літального апарату [см заявку на винахід Росії №2002128657/12, МПК А62В37/00, G08B25/00, Дата публікації заявки 2004.05.10] який передбачає запуск для виходу в район доставки комплексу доставки у вигляді безпілотного літального апарату забезпеченого розміщеними на ньому групою безпілотних літальних апаратів-носіїв корисного вантажу, наведення безпілотного літального апарату на місце доставки, пуск після досягнення безпілотного літального апарату району доставки безпілотних літальних апаратів-носіїв корисного вантажу в район доставки, управління польотом безпілотного літального апарату за допомогою радіо командної лінії управління за допомогою аналізу зображення з телевізійної камери розміщеної на безпілотному літальному апараті, формування команд радіонаведения безпілотного літального апарату-носія корисного вантажу на місце доставки за допомогою аналізу параметрів взаємного розташування безпілотного літального апарату-носія корисного вантажу і місця доставки, отриманого з телевізійної камери з використанням ретранслятора сигналів радіокомандної лінії управління. Недоліком такого способу є великі габарити і вага комплексу який включає перший безпілотний літальний апарат розміщені на ньому група безпілотних літальних апаратів-носіїв корисного вантажу, необхідність наявності на комплексі засобів зберігання, кріплення, забезпечення пуску з першого безпілотного літального апарату подальшої групи безпілотних літальних апаратів. Іншим недоліком такого способу є висока витрата енергії і палива на здійснення доставки зумовлена високою вагою комплексу. Істотним недоліком такого способу є неможливість змінити параметри вантажу за наслідками оцінки ситуації в місці події, оскільки вони жорстко визначені умовами пуску першого безпілотного літального апарату, а така необхідність зміни параметрів вантажу і точки доставки може виникнути за наслідками оцінки ситуації, наприклад в екстремальних ситуаціях при стихійних лихах, які розвиваються, для ліквідації яких-небудь перешкод і заторів і т.п. Органічні особливості способу обмежують період доставки вантажу який визначається за цим способом інтервалом часу між моментом пуску першого і останнього апарату носія корисного вантажу, оскільки апарати носії корисного вантажу пускаються в момент коли головний безпілотний літальний апарат вже знаходиться в районі доставки, хоча ситуація може вимагати затримку подачі частини вантажу. Такий спосіб пов'язаний з необхідністю вживання складних спеціальних технічних засобів для здійснення запуску комплексу великих габаритів і з 10978 обмеженням швидкості доставки обумовленою високою вагою комплексу. Спосіб також зв'язаний обмеженими можливостями прийняття рішення і здійснення дій виходячи з обмеженої ваги вантажу розташованого на основному літальному апараті і з тим що характер і параметри вантажу після досягнення району доставки і оцінки ситуації не можуть бути змінені, а на практиці кількості необхідного вантажу визначається і оцінкою конкретної ситуації і її розвитком. Завданням винаходу є створення способу управління польотом коректованого літального апарату в якому шляхом застосування нових дій способу управління та порядку їх здійснення забезпечується зменшення ваги коректованого способом літального апарату, знижується витрата енергії і (або) палива на здійснення доставки, забезпечується можливість здійснення нових видів дій управління які покращують умови доставки вантажів. Для вирішення цього завдання управління польотом коректованого літального апарату передбачає запуск безпілотного літального апарату для виходу в район доставки, наведення безпілотного літального апарату на місце доставки пуск після запуску безпілотного літального апарату іншого безпілотного літального апарату-носія корисного вантажу в район доставки управління польотом безпілотного літального апарату за допомогою радіокомандної лінії управління за допомогою аналізу зображення з телевізійної камери розміщеної на безпілотному літальному апараті, формування команд радіонаведення безпілотного літального апарату-носія корисного вантажу на місце доставки за допомогою аналізу параметрів взаємного розташування безпілотного літального апарату-носія корисного вантажу і місця доставки, отриманого з телевізійної камери з використанням ретранслятора сигналів радіокомандної лінії управління. Новим в способі є те що здійснюють роздільні пуски безпілотного літального апарату і безпілотного літального апарату-носія корисного вантажу, пуск після запуску безпілотного літального апарату іншого безпілотного літального апарату-носія корисного вантажу здійснюють із затримкою достатньою для формування команд корекції, а ретранслятором сигналів радіокомандної піни' управління забезпечують безпілотний літальний апаратносій корисного вантажу. Різко знижується вага коректованого літального апарату до рівня ваги системи отримання зображення з телевізійної камери і радіопередавача радіокомандної лінії управління, що дозволяє поширювати спосіб на інші типи коректованих літальних апаратів з невеликою вагою і іншою системою пуску. Об'єм і вага вантажу, що доставляється, не залежать від вантажопідйомності першого коректованого літального апарату і не обмежується його вантажопідйомністю Різко знижується витрата енергії і (або) палива на здійснення доставки зумовлена різким зниженням ваги всього комплексу. З'являється можливість змінити параметри вантажу за наслідками оцінки ситуації, оскільки в 10978 такому способі вони не визначені жорстко умовами пуску першого безпілотного літального апарату. Забезпечується можливість розширення періоду доставки який вже не обмежується інтервалом пуску першого і останнього апарату носія корисного вантажу, коли вони пускаються із зони розташування головного безпілотного літального апарату в момент коли головний безпілотний літальний апарат вже знаходиться в районі доставки хоча ситуація може вимагати затримку подачі частини вантажу. З'являється можливість змінити параметри вантажу за наслідками оцінки ситуації, оскільки вони перестають бути жорстко визначені умовами пуску першого коректованого літального апарату якій містить весь вантаж. Кожний подальший пуск безпілотних коректованих літальних апаратівносі'ів корисного вантажу може бути визначений необхідністю, яка змінюється, в процесі доставки. Розширення можливостей прийняття рішення і здійснення дії виходячи не з обмеженої ваги вантажу, а з кількості вантажу що визначається розвитком ситуації наприклад для ліквідації якихнебудь перешкод і заторів в екстремальних ситуаціях, при стихійних бідах. В окремих варіантах реалізації" способу після запуску безпілотного літального апарату здійснюють пуски групи безпілотних літальних апаратівносіїв корисного вантажу. Внаслідок застосування цих ознак забезпечується можливість надіслати в район стихійного лиха велику кількість вантажу. В окремих варіантах реалізації способу пуски групи безпілотних літальних апаратів-носіїв корисного вантажу здійснюють одночасно. Внаслідок цього забезпечується можливість у стислий термін з застосуванням мінімальних ресурсів надіслати в район стихійного лиха велику кількість вантажу. В окремих варіантах реалізації способу пуски групи безпілотних літальних апаратів- носі їв корисного вантажу здійснюють послідовно. Внаслідок цього забезпечується можливість застосовувати засоби зв'язку невеликої потужності І передавати інформацію між зоною пуску та стихійного лиха з застосуванням ретрансляції сигналів що додатково зменшить вагу засобів лінії ретрансляції і відповідно розміри літальних апаратів. В окремих варіантах реалізації способу пуски групи безпілотних літальних апаратів-носіїв корисного вантажу здійснюють паралельно-лослідовно. Внаслідок цього забезпечується можливість одночасно зменшити потужність лінії ретрансляції сигналів, з одночасним використанням мінімальних енергетичних ресурсів для направлення в район стихійного лиха великої кількості вантажу. В окремих варіантах реалізації способу час між пусками безпілотних літальних апаратів-носіїв корисного вантажу вибирають виходячи із забезпечення роботи лінії ретрансляції сигналів радюкомандної лінії управління. Застосування цих ознак забезпечує можливість мінімізувати потужність засобів лінії ретрансляції. В окремих варіантах реалізації способу повторно направляють безпілотний літальний апаратносій корисного вантажу, в якому як вантаж повторно застосовують телевізійну камеру радюкомандної лінії управління. Застосування цих ознак забезпечує можливість реагувати на зміну ситуації' в районі стихійного лиха у випадку коли зона стихійного лиха внаслідок зовнішніх факторів зміщується (наприклад у випадку дії течи) по відношенню до зони ди першої телевізійної' камери. В окремих варіантах реалізації способу як вантаж застосовують надувний плаваючий засіб. Застосування таких ознак забезпечує можливість функціонування системи управління більш подовжений термін внаслідок того що передавачі коректованого літального апарату будуть продовжувати знаходитись поблизу поверхні води і мати можливість продовжувати передавати сигнали. До того ж надувний плаваючий засіб може бути використаний також і людьми, які знаходяться у зоні стихійного лиха. В окремих варіантах реалізації способу як додатковий вантаж використовують парашут. Застосування таких ознак також забезпечує можливість функціонування системи управління більш подовжений термін внаслідок того що передавачі коректованого літального апарату будуть більш тривалий термін знаходитися над зоною стихійного лиха і мати можливість продовжувати передавати сигнали або досліджувати зону стихійного лиха. Заявлене рішення ілюструється прикладами реалізації способу управління польотом коректованого літального апарату та прикладами технічного виконання елементів конструкції, на базі яких може бути реалізовано спосіб. Для демонстрації технічної реалізації способу управління польотом коректованого літального апарату показуємо можливості технічної реалізації компонентів способу, що заявляється, а саме: можливості технічної реалізації конструкції безпілотного літального апарату (БПЛА) і його основних систем, а також способу управління і дорозвідки, локалізуючого місцеположення рятуємих людей (об'єктів) в районі стихійного лиха по інформаційних ознаках різної фізичної природи. Опис технічної реалізації БПЛА І його основних систем Система управління літальним апаратом передбачає застосування перед тим відомих способів дорозвідки, які локалізують місцеположення рятуємих людей (об'єктів) в районі стихійного лиха і можуть бути виконані на основі відомих алгоритмів по інформаційних ознаках різної фізичної природи, створюваних на фоні навколишнього середовища. У найпростішому випадку система дорозвідки може бути основана на радіосигналах від радіопередавачів або радіомаяків які знаходяться у рятуємих людей і коригуватися вручну із застосуванням відомостей отриманих за допомогою телевізійної камери (ТВ-камери). За результатами роботи підсистем розпізнавання і прийняття рішення здійснюють пуск необхідних технічних і рятувальних засобів. 8 БПЛА-ретранслятор містить два приймачі 2 і два передавачі 5 для ретрансляції команд управління з ПУ на БПЛА-ТВ, і ТВ-зображення у зворотному напрямі. Діаграми направленості відповідних приймальних 1 І передавальних 6 антен будуть направлені на ПУ і БПЛА-ТВ. БПЛА-ретранслятор також містить: - радіопеленгатор для локації радіомаяка, зв'язаного з БПЛА-ТВ; - радіомаяк для наведення на нього БПЛА- вантажовоза. Система управління рухом БПЛАретранслятора - автономна, забезпечує його наведення на БПЛА-ТВ. БПЛА-вантажовоз містить радіопеленгатор для локації радіомаяка, зв'язаного з БПЛАретранслятором. Система управління рухом БПЛА-вантажовозом - автономна, забезпечує його наведення на БПЛА-ретранслятор. Для зменшення взаємного впливу приймачів 2 і передавачів 5, особливо на БПЛА-ретрансляторі, один на одного, їх частоти настройки можуть бути рознесені. Наприклад, в радіолінії ПУ - БПЛАретранслятор його приймач 2 може працювати у виділеній відповідно до Регламенту радіозв'язку частотній смузі в діапазоні 1,2ГГц (-25см), а передавач 5 - в діапазоні 2,6ГГц. Для цієї радіолінії може бути використана лінійна поляризація радіохвиль з горизонтальною орієнтацією вектора напруженості електричного поля. Це дозволить використовувати приймальну і передаючу антени типу «хвильовий канал», розмістивши їх в крилах БПЛА. 10978 У способі можуть бути застосовані різні типи літальних апаратів зокрема апарат - БПЛА, оснащений надзвуковим прямоточним повітрянореактивним двигуном (ПВРД). Такі ПВРД широко відомі [див. «Теорія реактивних двигунів. Робочий процес і характеристики» п.р. акад. Б.С.Стечкина. Оборонгиз. М.; 1958. С.399.] Подібного роду двигун (залежно від конкретної конструкції) може працювати в діапазоні швидкостей 1-5М (М - швидкість звуку). Пальним для нього є авіаційний керосин, окислювачем кисень повітря. Як сказано на с 423 вказаного джерела: «характеристики ПВРД при надзвукових польотах свідчать про те, що в області великих швидкостей прямоточний двигун є дуже ефективним». Цей тип БПЛА характеризується простотою конструкції, і невеликими габаритами. Для малогабаритних ПВРД на оптимальній висоті і швидкості в умовах застосування способу витрата пального складатиме близько 10г за секунду польоту. Управління напрямком руху БПЛА здійснюється загальноприйнятим способом - поворотом повітряних рулів. Управляючі команди на сервопривід рулів поступають від Блоку управління рухом БПЛА, пов'язаного з радіоприймачем. На Фіг. 1 наведена можлива блок-схема приймача-передавача БПЛА з ретранслятором, а на Фіг.2 Блок-схема приймача-передавача БПЛА з ТВ-камерою. На зазначених схемах зображено: приймальна антена 1, приймач 2, блок управління рухом З, сервопривід рулів 4, передавач 5, передаюча антена 6, ТВ-камера 7. Для технічної реалізації прикладу даного способу управління можуть використовуються три функціонально спеціалізованих БПЛА: 1. БПЛА, який локалізує місцеположення людей (об'єктів) яких рятують в районі стихійного лиха по видимій картині, яка реєструється ТВкамерою БПЛА, сигналу радіомаяка, яким може бути обладнаний рятувальний жилет людини і т.п. Далі іменуватиметься БПЛА-ТВ; 3. БПЛА-ретранслятор, що ретранслює ТВзображення БПЛА-ТВ на пункт управління (далі ПУ), і команди управління з ПУ на БПЛА-ТВ; 3. БПЛА-вантажовоз, який доставляє корисний вантаж в район стихійного лиха. На практиці конкретні БПЛА можуть мати функціональні елементі які об'єднують дві будь-які з зазначених функцій або навіть всі три. БПЛА-ТВ містить приймач 2 і передавач 5 для прийому команд управління з ПУ через БПЛАретранслятор і передачі ТВ-зображення аналогічним чином. Діаграми направленості приймальної антени 1 та передавальної антени 6 будуть направлені проти напрямку руху БПЛА-ТВ для підтримки зв'язку з БПЛА-ретранслятором. При роботі всієї системи вони завжди будуть перебувати в межах радювидимості. БПЛА-ТВ також може містити: - радіопеленгатор для локації радіомаяка, зв'язаного з рятувальним засобом терплячої стихійне лихо людини. Інформація про напрямок на такий радіомаяк, також як і ТВ-зображення, передаватиметься у результаті на ПУ; - радіомаяк для наведення на нього БПЛАретранслятора. Практично постійна орієнтація площини антен 6 на БПЛА-ретрансляторі паралельно площині землі забезпечується автоматично схемою польоту (крила БПЛА паралельні землі). Приймачі 2 і передавачі 5 радіоліній БПЛАвантажовоз - БПЛА-ретранслятор - БПЛА-ТВ можуть працювати в частотних смугах міліметрового діапазону, що рознесені, наприклад 42-48ГГц. Для цих радіоліній може бути використаний кругова поляризації радіохвиль. Це усуває необхідність у взаємній кутовій орієнтації БПЛА. Використання міліметрового діапазону дозволить мініатюризувати приймальну 1 і передаючу 6 антени, виконавши їх рупорними, параболічними рефлекторними або антенами поверхових хвиль з періодичною структурою. Всі активні радюкомпоненти приймачівпередавачів можуть бути виконані на основі високо- і надвисокочастотних арсенід - галієвих (GaAs) польових транзисторів з затвором на бар'єрі Шоттки. Використання міліметрового діапазону - приклад лише одного з можливих варіантів реалізації радіолінії в заявленому способі управління. На практиці, у випадку необхідності роботи за умови дощу або сильного туману може бути застосована радіолінія іншого діапазону. Всі антени можуть бути інтегровані в конструкцію БПЛА, що забезпечить збереження їх високих аеродинамічних властивостей. Всі зазначені компоненти конструкції БПЛА широко відомі в техніці і описані в літературі. Наприклад, принципи функціонування систем зв'язку 10978 в діапазонах від 0,7 до 85ГГЦ (на прикладі діапазону 11/12ГГц) наведені в книзі «Супутникове телебачення в діапазонах 11/12ГГц», Єреван, 1990р., рекламно-інформаційне видання. Вірменський республіканський філіал. Агентство друку «NB-ПРЕС». відомості по антенах дециметрових і сантиметрових хвиль наведені в книзі «Радиолюбительский справочник» під загальн. ред. Д.П.Линде; Видавництво «Енергія», М-Л., 1966, стор.118-121. Оскільки прямоточний ВРД доцільно застосовувати по досягненні достатньо великих швидкостей, кожний з літальних апаратів, що розглядаються в даній заявці буде заздалегідь розганятися під час пуску до необхідної швидкості, наприклад за допомогою стартових твердопаливних реактивних двигунів, або іншими засобами. Опис способу управління польотом коректованого літального апарату. Після старту БПЛА-ТВ буде направлений до цілі. При цьому управління його польотом (в частині визначення поточних координат) може здійснюватися як локацією місцеположення БПЛА-ТВ з ПУ, так і з використанням модуля GPS, що приймає сигнали супутникової радіонавігаційної' системи. Таким чином, при не дуже великих відстанях від ПУ метод грубого визначення координат БПЛАТВ буде гібридним. Дорозвідка, яка локалізує місцеположення людей (об'єктів) в районі стихійного лиха, здійснюватиметься по інформаційних ознаках різної фізичної природи, як-то: видима картина, отримана ТВкамерою БПЛА, сигнал радіомаяка, яким може бути забезпечений рятувальний жилет людини і т.п. Таким чином БПЛА-ТВ буде точно, по командах з ПУ, направлений в потрібну точку району стихійного лиха. Через 3-Ю секунд після старту БПЛА-ТВ буде запущено БПЛА-ретранслятор. Згадана вище система управління рухом БПЛА-ретранслятора забезпечить його наведення на БПЛА-ТВ і падіння практично в ту ж саму точку (внаслідок схожості траєкторій на заключній ділянці руху). 10 Також через 3-10 секунд після старту БПЛАретранслятора буде запущено БПЛА-вантажовоз. Згадана вище система управління рухом БПЛАвантажовоза забезпечить його наведення на БПЛА-ретранслятор і падіння практично в ту ж саму точку (внаслідок схожості траєкторій на заключній ділянці руху). Попадання наступних, що рухаються один за одним БПЛА в одну і ту ж точку пояснюється також тим, що радіомаяки на БПЛА-ТВ і БПЛАретрансляторі можуть бути виконані ударостійкими і не руйнуватимуться при контакті з поверхнею води або суші. Кількість і порядок (послідовність) пусків які використовуються в одній місії БПЛАвантажовозів при цьому не обмежуються. У випадку коли у БПЛА-ретрансляторі як додатковий вантаж застосовують надувний плаваючий засіб також забезпечується можливість функціонування системи управління більш подовжений термін внаслідок того, що передавачі коректованого літального апарату будуть продовжувати знаходитись поблизу поверхні води і мати можливість продовжувати передавати сигнали. Подібна ситуація буде у випадку, коли у БПЛАретрансляторі як додатковий вантаж використовують парашут. Це також забезпечує можливість функціонування системи управління більш тривалий час внаслідок того, що передавачі коректованого літального апарату будуть більш тривалий час знаходитися над зоною стихійного лиха і мати можливість продовжувати передавати сигнали або досліджувати зону стихійного лиха У випадку коли зона стихійного лиха внаслідок зовнішніх факторів зміщується (наприклад у випадку ді'і течії) по відношенню до зони дії першої телевізійної камери, повторно направляють безпілотний літальний апарат-носій корисного вантажу, в якому як вантаж повторно застосовують телевізійну камеру радюкомандної лінії' управління. Застосування цих дій забезпечує можливість здійснювати більш гнучке управління польотом і відповідно реагувати на зміну ситуації в районі стихійного лиха. 11 10978 12 1 приймальна актєна Н3 1.2ГЩ передаюча антвнв НЭЗ.ВГГЦ 1 г1 1 І приймач на\,2ГЩ Блок управління |_J рухом БПЛА і і передавай на42ГПД передаагч из 2,6 ГҐЦ приймач на4ВГГЦ \ 6 р/лів антена антєна на Фіг. 1 з антена ^ блок управління і рухом БПЛА j Пржмач на 42 Г Ш "і рулір Н3 42ГГЦ передаюча знтена на49ГПЦ передавач наЛВГГЦ 7 5 Фіг. 2 Комп'ютерна верстка В Мацело Підписне Тираж 26 прим. Міністерство освгги і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП 'Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 42, 01601 і
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling flight of correcting flight vehicle
Автори англійськоюKanevskyi Valerii Oleksandrovych, Liadenko Andrii Pylypovych, Tselenko Oleksandr Mykhaylovich, Yakovenko Petro Oleksiiovych
Назва патенту російськоюСпособ управления полетом корректируемого летательного аппарата
Автори російськоюКаневский Валерий Александрович, Ляденко Андрей Филиппович, Целинко Александр Михайлович, Яковенко Петр Алексеевич
МПК / Мітки
МПК: G08B 25/00, A62B 37/00
Мітки: управління, коректованого, апарата, літального, спосіб, польотом
Код посилання
<a href="https://ua.patents.su/6-10978-sposib-upravlinnya-polotom-korektovanogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління польотом коректованого літального апарата</a>
Спосіб управління технічним станом літального апарата
Номер патенту: 69740
Опубліковано: 15.09.2004
Автори: Щербина Володимир Миколайович, Петренко Всеволод Григорович, Семон Богдан Йосипович, Волошин Ігор Іванович
МПК: G05B 13/00
Мітки: технічним, станом, спосіб, управління, літального, апарата
Формула / Реферат:
Спосіб управління технічним станом літального апарата, при якому отримують параметри технічного стану літального апарата, параметри процесу технічної експлуатації, параметри зовнішніх факторів та параметри мети технічної експлуатації, формують оператор корегування параметрів управління процесу технічної експлуатації відповідного каналу, формують команду управління виконавчим пристроєм відповідного каналу, корегують параметри процесу технічної...
Ергономічний друкувальний пристрій, що використовується на блоці управління польотом літального апарата, важчого за повітря
Номер патенту: 22116
Опубліковано: 30.04.1998
Автори: Рібейро Жан, Дюбуа Марсель
МПК: B41J 15/04, B41J 29/00, G06F 3/12, B41J 29/44, B65H 75/04, B41J 15/16
Мітки: літального, управління, польотом, друкувальний, блоці, використовується, повітря, важчого, пристрій, апарата, ергономічний
Формула / Реферат:
1. Эргономичное печатающее устройство, используемое в блоке управления полетом летательного аппарата тяжелее воздуха, содержащее ограниченную несущим корпусом кассету для помещения в нее рулона бумаги и имеющую держатель для установки на него рулона бумаги с возможностью свободного вращения на геометрической оси, причем корпус имеет в своей лицевой стенке загрузочное отверстие для ввода рулона в кассету поступательным перемещением параллельно...
Система управління літального апарата
Номер патенту: 62989
Опубліковано: 15.01.2004
Автори: Гусєв Борис Васильович, Абрамов Леонід Ілліч, Абрамов Євген Ілліч, Мойсеєв Володимир Гаврилович, Затолокін Анатолій Сергійович
МПК: B64C 13/00
Мітки: літального, управління, система, апарата
Формула / Реферат:
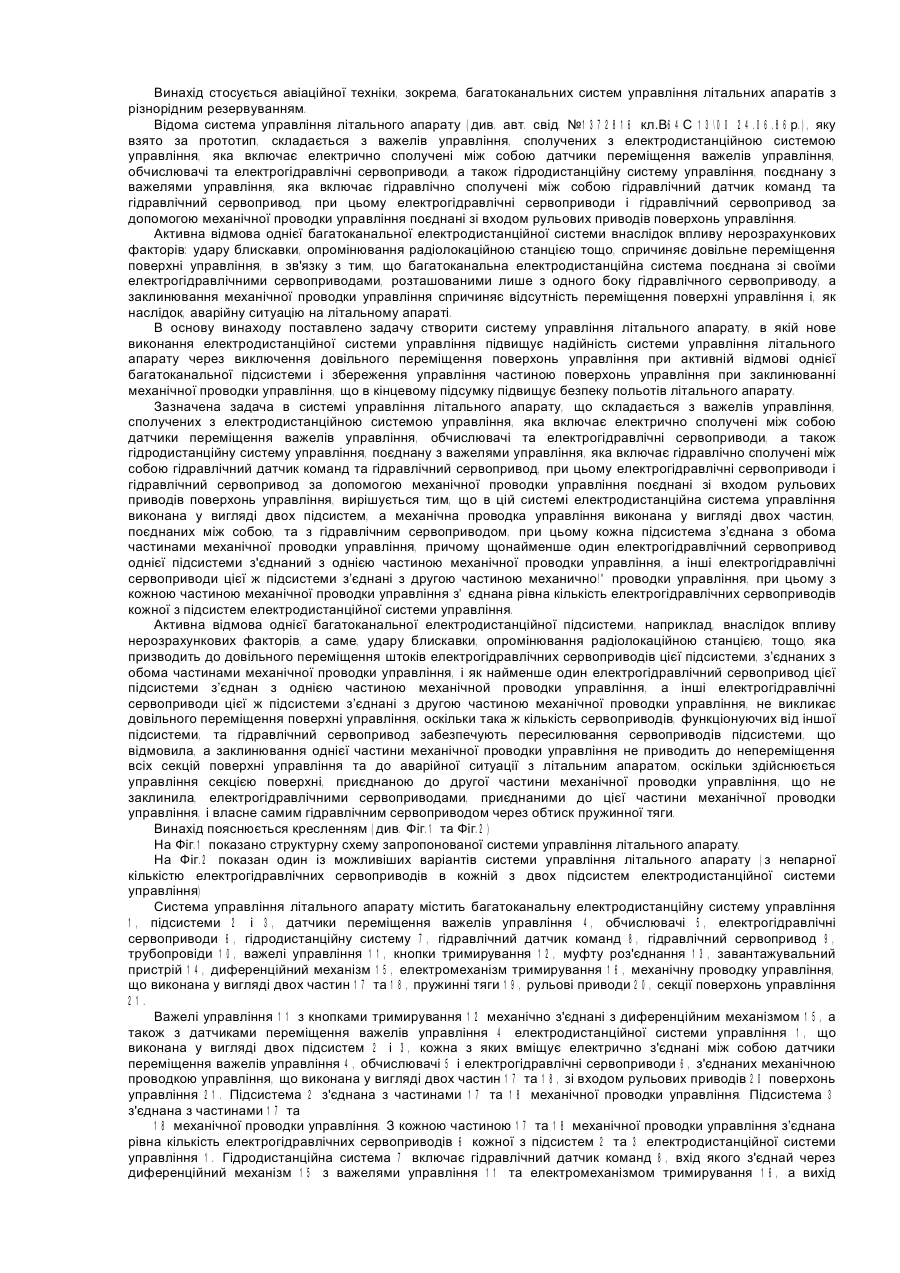
Система управління літального апарата, яка містить важелі управління, сполучені з електродистанційною системою управління, яка включає електрично сполучені між собою датчики переміщення важелів управління, обчислювачі та електрогідравлічні сервоприводи, а також гідродистанційну систему управління, з'єднану з важелями управління, яка включає гідравлічно сполучені між собою гідравлічний датчик команд та гідравлічний сервопривод, при цьому...
Система протиобледеніння літального апарата
Номер патенту: 50674
Опубліковано: 15.10.2002
Автори: Жихарев Володимир Якович, Чечуй Олександр Вікторович, Торчило Віталій Микитович, Кас'ян Ольга Викторівна, Шилова Тетяна Вікторівна
МПК: B64D 15/00
Мітки: апарата, літального, протиобледеніння, система
Формула / Реферат:
Система протиобледеніння літального апарата, яка має n датчиків струму, n контакторів, n нагрівальних елементів, пристрій управління, джерело живлення, до якого через відповідні контактори підключені нагрівальні елементи, яка відрізняється тим, що містить n формувачів імпульсів, n детекторів фронту і n детекторів спаду, причому виходи і-го датчика струму з'єднані з входами і-го формувача імпульсів, вихід якого з'єднаний через і-тий детектор...
Крило літального апарата
Номер патенту: 64342
Опубліковано: 16.02.2004
Автор: Руднєв Юрій Миколайович
Мітки: літального, апарата, крило
Формула / Реферат:
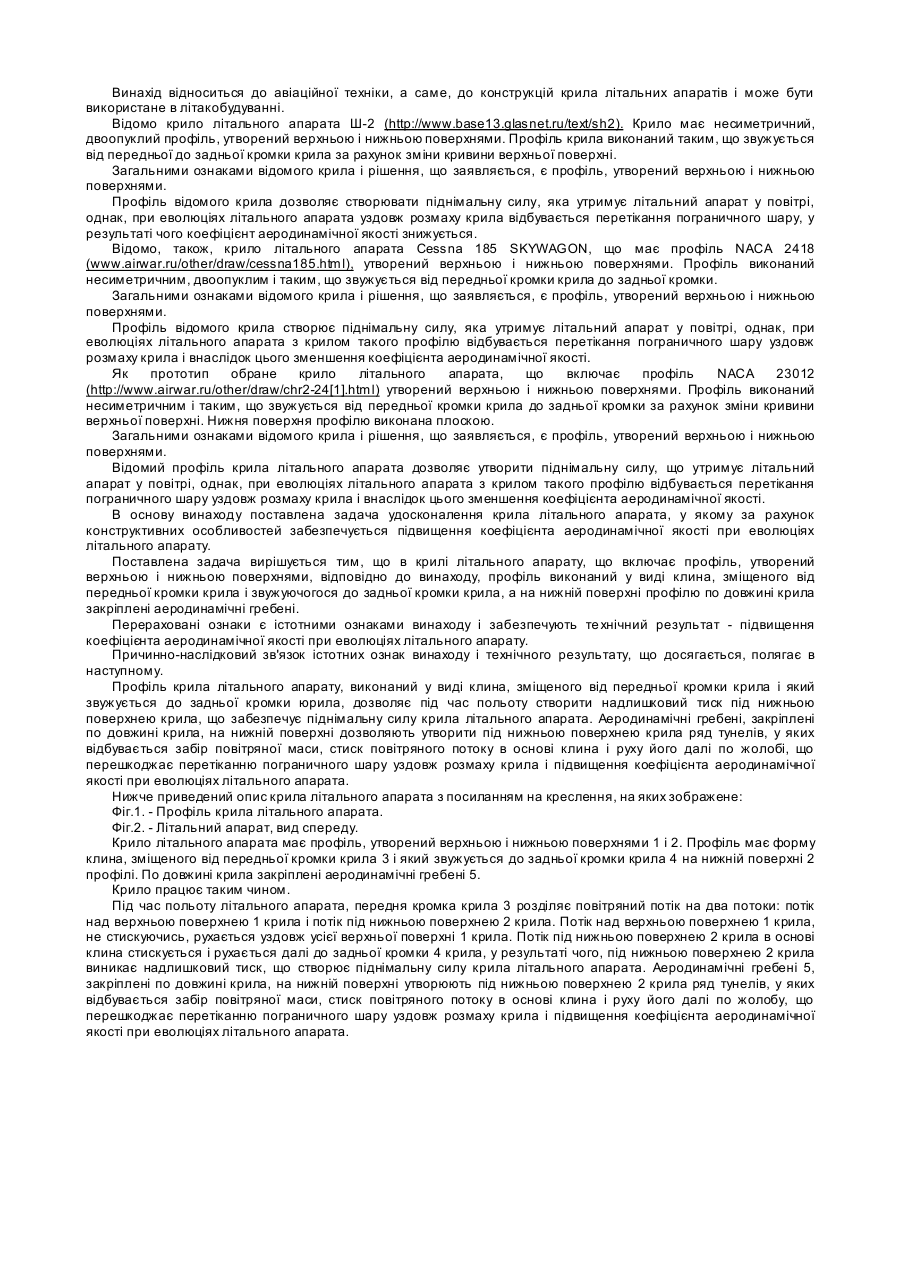
Крило літального апарата, що включає профіль, утворений верхньою і нижньою поверхнями, яке відрізняється тим, що профіль виконаний у вигляді клина, зміщеного від передньої кромки крила і який звужується до задньої кромки крила, а на нижній поверхні профілю по довжині крила закріплені аеродинамічні гребені.
Попередній патент: Пристрій для нагрівання води
Наступний патент: Механізм накатування полотна круглов’язальної машини
Випадковий патент: Препарат ветеринарний "нормотел"