Спосіб визначення місцеположення об’єкта
Номер патенту: 109915
Опубліковано: 12.09.2016
Автори: Гівентарь Дмитро Маркович, Беренок Олександр Григорович
Формула / Реферат
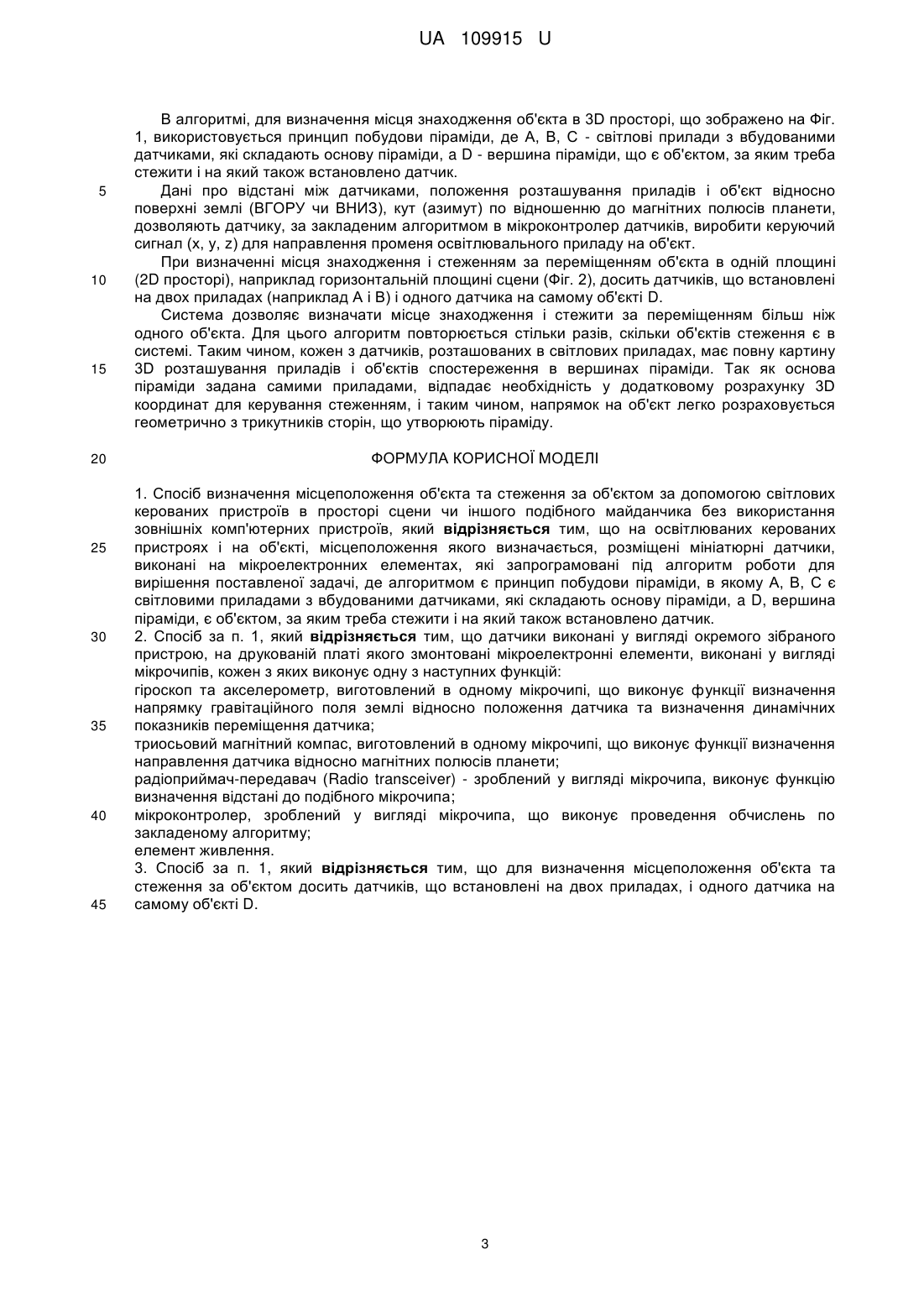
1. Спосіб визначення місцеположення об'єкта та стеження за об'єктом за допомогою світлових керованих пристроїв в просторі сцени чи іншого подібного майданчика без використання зовнішніх комп'ютерних пристроїв, який відрізняється тим, що на освітлюваних керованих пристроях і на об'єкті, місцеположення якого визначається, розміщені мініатюрні датчики, виконані на мікроелектронних елементах, які запрограмовані під алгоритм роботи для вирішення поставленої задачі, де алгоритмом є принцип побудови піраміди, в якому А, В, С є світловими приладами з вбудованими датчиками, які складають основу піраміди, a D, вершина піраміди, є об'єктом, за яким треба стежити і на який також встановлено датчик.
2. Спосіб за п. 1, який відрізняється тим, що датчики виконані у вигляді окремого зібраного пристрою, на друкованій платі якого змонтовані мікроелектронні елементи, виконані у вигляді мікрочипів, кожен з яких виконує одну з наступних функцій:
гіроскоп та акселерометр, виготовлений в одному мікрочипі, що виконує функції визначення напрямку гравітаційного поля землі відносно положення датчика та визначення динамічних показників переміщення датчика;
триосьовий магнітний компас, виготовлений в одному мікрочипі, що виконує функції визначення направлення датчика відносно магнітних полюсів планети;
радіоприймач-передавач (Radio transceiver) - зроблений у вигляді мікрочипа, виконує функцію визначення відстані до подібного мікрочипа;
мікроконтролер, зроблений у вигляді мікрочипа, що виконує проведення обчислень по закладеному алгоритму;
елемент живлення.
3. Спосіб за п.1, який відрізняється тим, що для визначення місцеположення об'єкта та стеження за об'єктом досить датчиків, що встановлені на двох приладах, і одного датчика на самому об'єкті D.
Текст
Реферат: Спосіб визначення місцеположення об'єкта та стеження за об'єктом за допомогою світлових керованих пристроїв в просторі сцени чи іншого подібного майданчика без використання зовнішніх комп'ютерних пристроїв. На освітлюваних керованих пристроях і на об'єкті, місцеположення якого визначається, розміщені мініатюрні датчики, виконані на мікроелектронних елементах, які запрограмовані під алгоритм роботи для вирішення поставленої задачі, де алгоритмом є принцип побудови піраміди, в якому А, В, С є світловими приладами з вбудованими датчиками, які складають основу піраміди, a D, вершина піраміди, є об'єктом, за яким треба стежити і на який також встановлено датчик. UA 109915 U (12) UA 109915 U UA 109915 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області мистецтва, дизайну, оформлення і може бути використана для технічного забезпечення в сценічних постановках, в телевізійних зйомках, презентаціях тощо. З рівня техніки відомо спеціальне обладнання, а саме керовані світлові прилади, керовані відеопроектори на лірах, і мініатюрні пристрої, виконані на мікроелектронних елементах, що дозволяють визначати відстань між об'єктами за допомогою виміру часу проходження радіосигналу, напрямок щодо магнітних полюсів планети за допомогою триосьового магнітного компасу; положення об'єкта ВГОРУ чи ВНИЗ шляхом визначення напряму гравітаційного поля та одержувати дані про динаміку руху за допомогою гіроскопа з акселерометром. Визначення місця знаходження об'єкта може бути визначено різними способами, які описані в попередньому рівні техніки. Патент України на винахід № 59366 описує спосіб і пристрій, що діють у реальному часі, для виявлення й локалізації ділянки, що здійснює відносне переміщення в межах зони спостереження, і для визначення швидкості й орієнтованого напряму згаданого відносного переміщення в реальному часі. Спосіб дозволяє здійснювати часову обробку вхідного цифрового відеосигналу S (РІ), яка полягає у визначенні змін між значенням кожного піксела в кадрі й у безпосередньо передуючому йому кадрі, двійкового сигналу DP, що вказує на наявність або відсутність значущої зміни, і цифрового сигналу CO, що виражає величину цієї зміни, і просторову обробку, що полягає в розподілі по матриці згаданих двох сигналів послідовно для одиночного кадру, що сканується через матрицю, й визначенні необхідного відносного переміщення і його параметрів по вказаному матричному розподілу. Патент України на винахід № 96206 розкриває спосіб визначення місцезнаходження об'єкта, який заснований на тому, що джерела магнітного поля у вигляді витків зі струмом мають рівну площу й не перетинаються; зазначені джерела магнітного поля розташовують у кожній із чотирьох різних точок об'єкта таким чином, що зазначені точки розташовані на двох взаємно ортогональних прямих, на фіксованій відстані від точки перетинання зазначених прямих і симетрично щодо зазначеної точки перетинання; вибирають місце розташування однієї точки простору поза об'єктом і розташовують у зазначеній точці векторний магнітометр; активують одне з зазначених джерел магнітного поля й реєструють значення вектора магнітної індукції в вибраній точці; процедуру повторюють для кожного із чотирьох зазначених джерел магнітного поля, який відрізняється тим, що фіксована відстань між точками розташування зазначених джерел в кілька разів менша за відстань до точки розташування векторного магнітометра; активують попарно джерела магнітного поля по градієнтній схемі, реєструють значення п'яти незалежних просторових похідних вектора магнітної індукції першого порядку в вибраній точці простору й за отриманим значенням визначають значення напрямку на об'єкт; активують одночасно всі чотири джерела магнітного поля, реєструють значення вектора магнітної індукції в вибраній точці простору й за отриманим значенням визначають відстань до об'єкта. В публікації WO/2010/025559 описано спосіб спостереження у реальному часі та модуль керування (RTM), які призначені для координації одного або більше ніж одного пристрою або об'єкта у фізичному середовищі. Віртуальне середовище створюється для кореляції з різними об'єктами і параметрами в межах фізичного середовища. RTM здатний одержувати дані про параметри та показники фізичних об'єктів і відповідним чином оновлювати параметри віртуальних об'єктів у віртуальному середовищі. RTM здатний також забезпечувати даними, що були одержані з віртуального середовища відносно одного або більше пристроїв, таких як роботизовані камери, в режимі реального часу. Інтерфейс до RTM дозволяє декільком пристроям взаємодіяти з RTM, координуючи таким чином пристрої. В публікації WO/2004/081602 описується радіочастотна (RF) система захоплення руху, що включає стаціонарні датчики прийому, один або більше передавачів маркерів тегів на один або кілька об'єктів, які необхідно відстежувати в зоні захоплення, щонайменше один стаціонарний передавач опорного тегу і систему для обробки прийнятих сигналів. Окремі теги передають викид RF сигналів з розширеним спектром. Передані сигнали містять загальний код синхронізації, а також ідентифікаційний код тегу, який є унікальним для кожного тегу. Шляхом обчислення подвійних різниць псевдодальності тактові терміни гасяться, дозволяючи системі обробки точно визначити місце розташування кожного тегу, як воно рухається через зону захоплення без необхідності синхронізації годин між датчиками і тегами. Найближчим аналогом до даної корисної моделі можна розглядати систему, що описана в документі ЕР1666912 (А1). В даному аналогу всі виміри відстані виконуються за допомогою вимірювання часу проходження радіосигналу від базових станцій та станцією еталонного об'єкта, місцезнаходження якого є відомим, після чого ці результаті порівнюються з часом проходження радіосигналу від базових станцій до станції об'єкта, місцезнаходження якого 1 UA 109915 U 5 10 15 20 25 30 35 40 45 50 55 необхідно визначити. Всі ці дані передаються від кожної базової станції по лініям передачі даних до комп'ютера (сервера), де за допомогою складного алгоритму вираховуються координати об'єкта та формуються, при потребі, сигнали керування. До недоліків даної системи можна віднести необхідність застосування великої кількості базових станцій (більше трьох), необхідність мати еталонний об'єкт із станцією, необхідність налаштування ліній передачі даних від кожної базової станції до комп'ютера, а також необхідно мати сам комп'ютер для виконання обчислень. В основу даної корисної моделі поставлено задачу спростити спосіб визначення місцеположення об'єкта за рахунок відсутності зовнішніх комп'ютерних пристроїв (серверів), в яких обробляються дані про місцеположення об'єкта та формується сигнал керування пристроями. В зв'язку з цим відпадає необхідність встановлення та налагодження ліній передачі даних від базових станцій до комп'ютера. В даній корисній моделі зменшена кількість датчиків, за рахунок відсутності станції еталонного об'єкта. Також в представленій корисній моделі для визначення місцезнаходження об'єктів, окрім даних про відстань між кожним датчиком, які отримуються за допомогою виміру часу проходження радіосигналу між датчиками, додатково про об'єкт, на якому встановлено датчик, існує можливість одержання даних про те, як зорієнтований кожен об'єкт щодо магнітних полюсів планети, відносно поверхні землі (ВГОРУ чи ВНИЗ) та дані про динаміку руху такого об'єкта. Представлена корисна модель створена для визначення місця знаходження об'єкта та стеження за об'єктом світловими керованими пристроями або іншими керованими пристроями в просторі сцени чи іншого подібного майданчика, без використання зовнішніх комп'ютерних пристроїв, які обробляють дані для визначення місця знаходження об'єкта та формують сигнали для керування пристроями, щоб направити їх на цей об'єкт. Тобто головною відмінністю даної корисної моделі є відсутність зовнішніх комп'ютерних пристроїв (серверів), в яких обробляються дані про місце знаходження об'єкта, з використанням 3D моделі даного простору, і де виробляються керуючі сигнали для відстеження за цим об'єктом освітлювальним або іншим пристроєм. Поставлена задача вирішується тим, що на освітлювальних керованих пристроях (так званих, інтелектуальних світлових приладах) і на об'єкті, місце розташування якого потрібно визначити, розміщуються мініатюрні датчики, виконані на мікроелектронних елементах, які запрограмовані під певний алгоритм роботи для вирішення поставленої задачі. Кожен датчик виконаний у вигляді окремого зібраного пристрою, на друкованій платі якого змонтовані мікроелектронні елементи, виконані у вигляді мікрочипів, кожен з яких виконує одну з наступних функцій: 1) гіроскоп та акселерометр, виготовлений в одному мікрочипі, що виконує функції визначення напрямку гравітаційного поля землі відносно положення датчика та визначення динамічних показників переміщення датчика; 2) триосьовий магнітний компас, виготовлений в одному мікрочипі, що виконує функції визначення направлення датчика відносно магнітних полюсів планети; 3) радіоприймач-передавач (Radio transceiver) - зроблений у вигляді мікрочипа, виконує функцію визначення відстані до подібного мікрочипа. 4) мікроконтролер, зроблений у вигляді мікрочипа, що виконує проведення обчислень по закладеному алгоритму. 5) елемент живлення. В основу алгоритму роботи системи, яку зображено на Фіг. 1, поставлено ідею обчислення довжин сторін кожного трикутника, сторони якого одночасно є ребрами суміжних граней "піраміди", в точках вершин якої встановлено датчики. Вершини А, В, С лежать в основі цієї піраміди, а вершина D є об'єктом, місце знаходження якого необхідно визначити. Так, у трикутнику A D С, сторона АС входить до основи піраміди і є незміною по довжині, а сторони AD та CD зв'язані вершиною D і змінюються в залежності від місця знаходження самого об'єкта D. В цілому, в даній моделі, за даними датчиків можливо одержати дані довжин сторін АС, СВ, ВА, які не змінюються і є базовими для даної системи, а також дані довжин сторін AD, CD, ВС на даний конкретний час або для конкретного місця знаходження об'єкта D. Також алгоритм враховує, що сторони AD, CD та ВС є ребрами суміжних граней "піраміди", що формують D вершину піраміди, і дана вершина D є об'єктом, місце знаходження якого необхідно визначити. Дані про те, як, ВГОРУ чи ВНИЗ, відносно напрямку гравітаційного поля землі розташовані світлові прилади А, В, С та об'єкт D, враховуються при обчислені команд керування для стеження світловими приладами А, В, С за об'єктом D. Дані про динаміку руху об'єкта D враховуються в алгоритмі стеження світловим приладами за об'єктом. 2 UA 109915 U 5 10 15 20 25 30 35 40 45 В алгоритмі, для визначення місця знаходження об'єкта в 3D просторі, що зображено на Фіг. 1, використовується принцип побудови піраміди, де А, В, С - світлові прилади з вбудованими датчиками, які складають основу піраміди, a D - вершина піраміди, що є об'єктом, за яким треба стежити і на який також встановлено датчик. Дані про відстані між датчиками, положення розташування приладів і об'єкт відносно поверхні землі (ВГОРУ чи ВНИЗ), кут (азимут) по відношенню до магнітних полюсів планети, дозволяють датчику, за закладеним алгоритмом в мікроконтролер датчиків, виробити керуючий сигнал (х, у, z) для направлення променя освітлювального приладу на об'єкт. При визначенні місця знаходження і стеженням за переміщенням об'єкта в одній площині (2D просторі), наприклад горизонтальній площині сцени (Фіг. 2), досить датчиків, що встановлені на двох приладах (наприклад А і В) і одного датчика на самому об'єкті D. Система дозволяє визначати місце знаходження і стежити за переміщенням більш ніж одного об'єкта. Для цього алгоритм повторюється стільки разів, скільки об'єктів стеження є в системі. Таким чином, кожен з датчиків, розташованих в світлових приладах, має повну картину 3D розташування приладів і об'єктів спостереження в вершинах піраміди. Так як основа піраміди задана самими приладами, відпадає необхідність у додатковому розрахунку 3D координат для керування стеженням, і таким чином, напрямок на об'єкт легко розраховується геометрично з трикутників сторін, що утворюють піраміду. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Спосіб визначення місцеположення об'єкта та стеження за об'єктом за допомогою світлових керованих пристроїв в просторі сцени чи іншого подібного майданчика без використання зовнішніх комп'ютерних пристроїв, який відрізняється тим, що на освітлюваних керованих пристроях і на об'єкті, місцеположення якого визначається, розміщені мініатюрні датчики, виконані на мікроелектронних елементах, які запрограмовані під алгоритм роботи для вирішення поставленої задачі, де алгоритмом є принцип побудови піраміди, в якому А, В, С є світловими приладами з вбудованими датчиками, які складають основу піраміди, a D, вершина піраміди, є об'єктом, за яким треба стежити і на який також встановлено датчик. 2. Спосіб за п. 1, який відрізняється тим, що датчики виконані у вигляді окремого зібраного пристрою, на друкованій платі якого змонтовані мікроелектронні елементи, виконані у вигляді мікрочипів, кожен з яких виконує одну з наступних функцій: гіроскоп та акселерометр, виготовлений в одному мікрочипі, що виконує функції визначення напрямку гравітаційного поля землі відносно положення датчика та визначення динамічних показників переміщення датчика; триосьовий магнітний компас, виготовлений в одному мікрочипі, що виконує функції визначення направлення датчика відносно магнітних полюсів планети; радіоприймач-передавач (Radio transceiver) - зроблений у вигляді мікрочипа, виконуєфункцію визначення відстані до подібного мікрочипа; мікроконтролер, зроблений у вигляді мікрочипа, що виконує проведення обчислень по закладеному алгоритму; елемент живлення. 3. Спосіб за п. 1, який відрізняється тим, що для визначення місцеположення об'єкта та стеження за об'єктом досить датчиків, що встановлені на двох приладах, і одного датчика на самому об'єкті D. 3 UA 109915 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: об'єкта, місцеположення, визначення, спосіб
Код посилання
<a href="https://ua.patents.su/6-109915-sposib-viznachennya-miscepolozhennya-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення місцеположення об’єкта</a>
Спосіб і пристрій підтримки послуг визначення місцеположення із вдосконаленим рівнем послуги визначення місцеположення
Номер патенту: 103394
Опубліковано: 10.10.2013
Автори: Едж Стефен В., Вахтер Андреас К.
МПК: H04W 4/02, H04W 4/20, H04L 29/08
Мітки: підтримки, рівнем, послуг, послуги, місцеположення, спосіб, вдосконаленим, пристрій, визначення
Формула / Реферат:
1. Спосіб отримання послуги визначення місцеположення, що містить етапи, на яких:обмінюються щонайменше одним повідомленням між терміналом і сервером визначення місцеположення один раз для встановлення розширеного сеансу визначення місцеположення визначеної тривалості, включаючи етапи, на яких: відправляють перше повідомлення від термінала на сервер визначення місцеположення для ініціювання встановлення розширеного сеансу...
Спосіб визначення місцеположення точок акупунктури
Номер патенту: 37001
Опубліковано: 16.04.2001
Автори: Смердова Тетяна Андріївна, Крижанівський Володимир Ярославович, Грицюк Ольга Володимирівна
МПК: A61H 39/02
Мітки: спосіб, місцеположення, визначення, точок, акупунктури
Формула / Реферат:
1. Спосіб визначення місцеположення точок акупунктури, який полягає в тому, що встановлюють давач фізичного параметра на поверхні шкіри, переміщують його в передбачуваній зоні знаходження точки акупунктури і за максимальною амплітудою фізичного параметра, який вимірюють, визначають наявність точки акупунктури на місці розміщення давача, який відрізняється тим, що трьохелектродним давачем формують функціональне співвідношення імпедансів двох...
Спосіб визначення місцеположення свищів у виробах
Номер патенту: 27486
Опубліковано: 12.11.2007
Автори: Бабак Віталій Павлович, Пономаренко Олександр Васильович, Філоненко Сергій Федорович
МПК: G01N 29/14, G01M 3/00, F17D 5/02, G01N 29/00
Мітки: виробах, місцеположення, спосіб, свищів, визначення
Формула / Реферат:
Спосіб визначення місцеположення свищів у виробах, що включає встановлення на об'єкті контролю двох датчиків, реєстрацію сигналів акустичної емісії з одночасним вимірюванням їх характеристик, за якими визначають місцеположення свищів, який відрізняється тим, що як вищезгадані характеристики використовують положення в часі енергетичного центра ваги пікового сигналу у взаємній кореляційній функції, за яким визначають місцеположення свища у...
Спосіб визначення місцеположення об’єктів у двовимірному просторі
Номер патенту: 98316
Опубліковано: 27.04.2015
Автори: Гімпілевич Юрій Борисович, Савочкін Дмитро Олександрович
МПК: G01S 13/75
Мітки: спосіб, місцеположення, просторі, об'єктів, визначення, двовимірному
Формула / Реферат:
Спосіб визначення місцеположення об'єктів у двовимірному просторі на основі системи радіочастотної ідентифікації і просторової локалізації, яка складається зі зчитувача, набору антен, блока локалізації та набору радіоміток, розташованих на об'єктах локалізації, який полягає в тому, що результуючу точкову оцінку місцеположення радіомітки та відповідного об'єкта локалізації в області локалізації формують за допомогою декількох алгоритмів...
Спосіб однозначного визначення місцеположення об’єкта на площині
Номер патенту: 45179
Опубліковано: 26.10.2009
Автори: Шинкарук Олег Миколайович, Сівак Вадим Анатолійович, Лисий Микола Іванович, Солонніков Владислав Григорович
МПК: G01S 5/00, G08B 13/00
Мітки: спосіб, місцеположення, однозначного, визначення, об'єкта, площині
Формула / Реферат:
Спосіб однозначного визначення місцеположення об'єкта на площині, який базується на визначенні пеленга об'єкта тріадою ненаправлених пасивних датчиків, який відрізняється тим, що шукане однозначне місцеположення об'єкта, у вигляді лінійних координат, визначають як точку перетину двох гіпербол і пеленга, які є лініями положення об'єкта.
Попередній патент: Універсальний тримач для харчових продуктів
Наступний патент: Спосіб визначення поверхнево-активних компонентів у водних розчинах
Випадковий патент: Набір отоларингологічних інструментів оглядовий одноразовий