Інтелектуальна система керування безпілотним автомобілем з використанням транспортного порталу та gps-системи
Номер патенту: 109985
Опубліковано: 26.09.2016
Формула / Реферат
Інтелектуальна система керування безпілотним автомобілем, що містить датчики збору з передавачем інформації про стан руху транспортного засобу, які з’єднані з головним бортовим комп'ютером, який з’єднаний з виконавчими пристроями та з пристроєм відображення інформації, яка відрізняється тим, що на безпілотному автомобілі додатково встановлено GPS-систему та транспортний портал, які виконані з можливістю отримувати та обробляти дані у реальному режимі часу про положення транспортного засобу на дорозі, його швидкість руху та ситуацію оточуючих транспортний засіб мобільних і стаціонарних об'єктів, здійснювати корегування системою рульового управління, гальмівною системою, системою курсової стійкості, системою управління двигуном та інші.
Текст
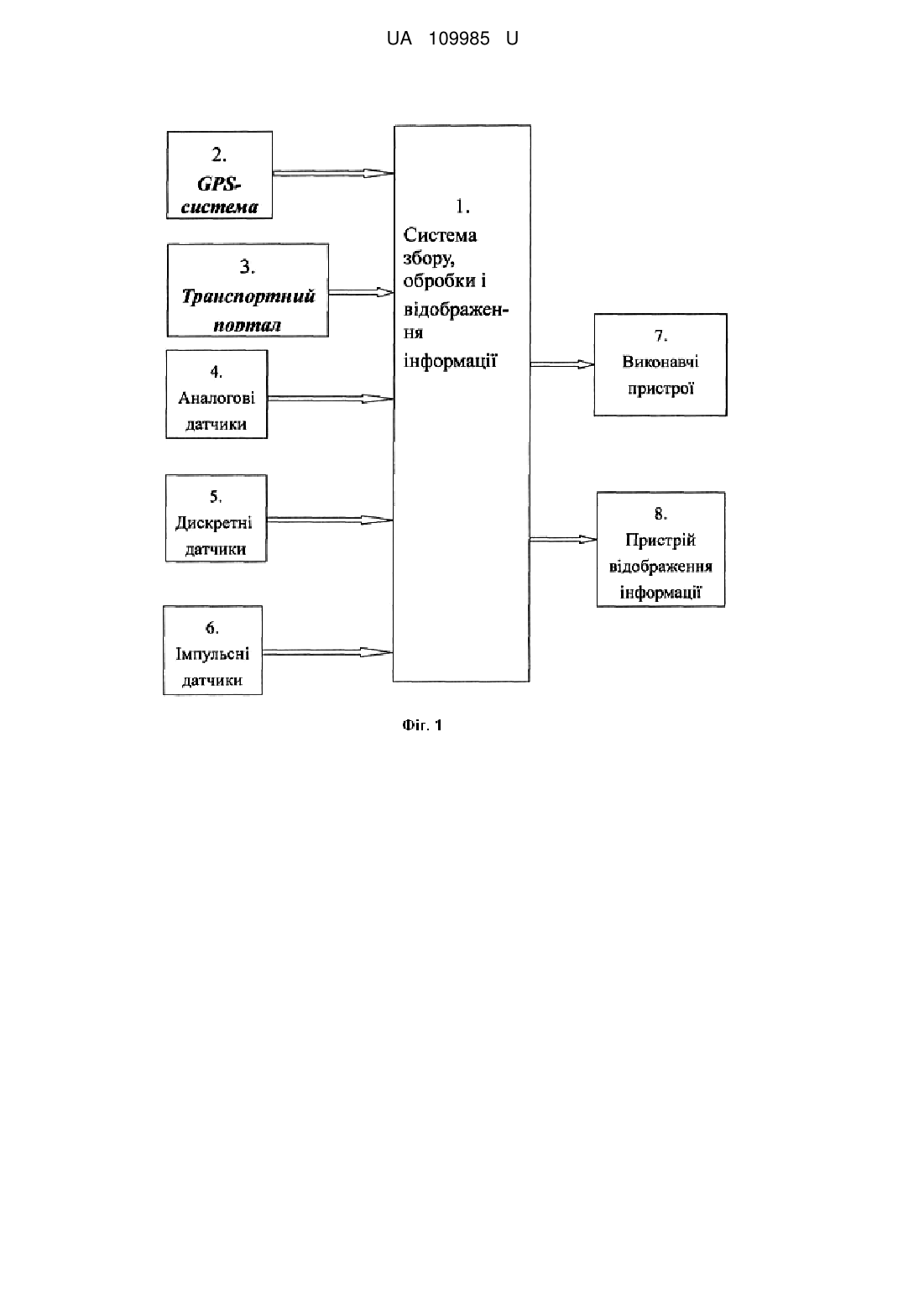
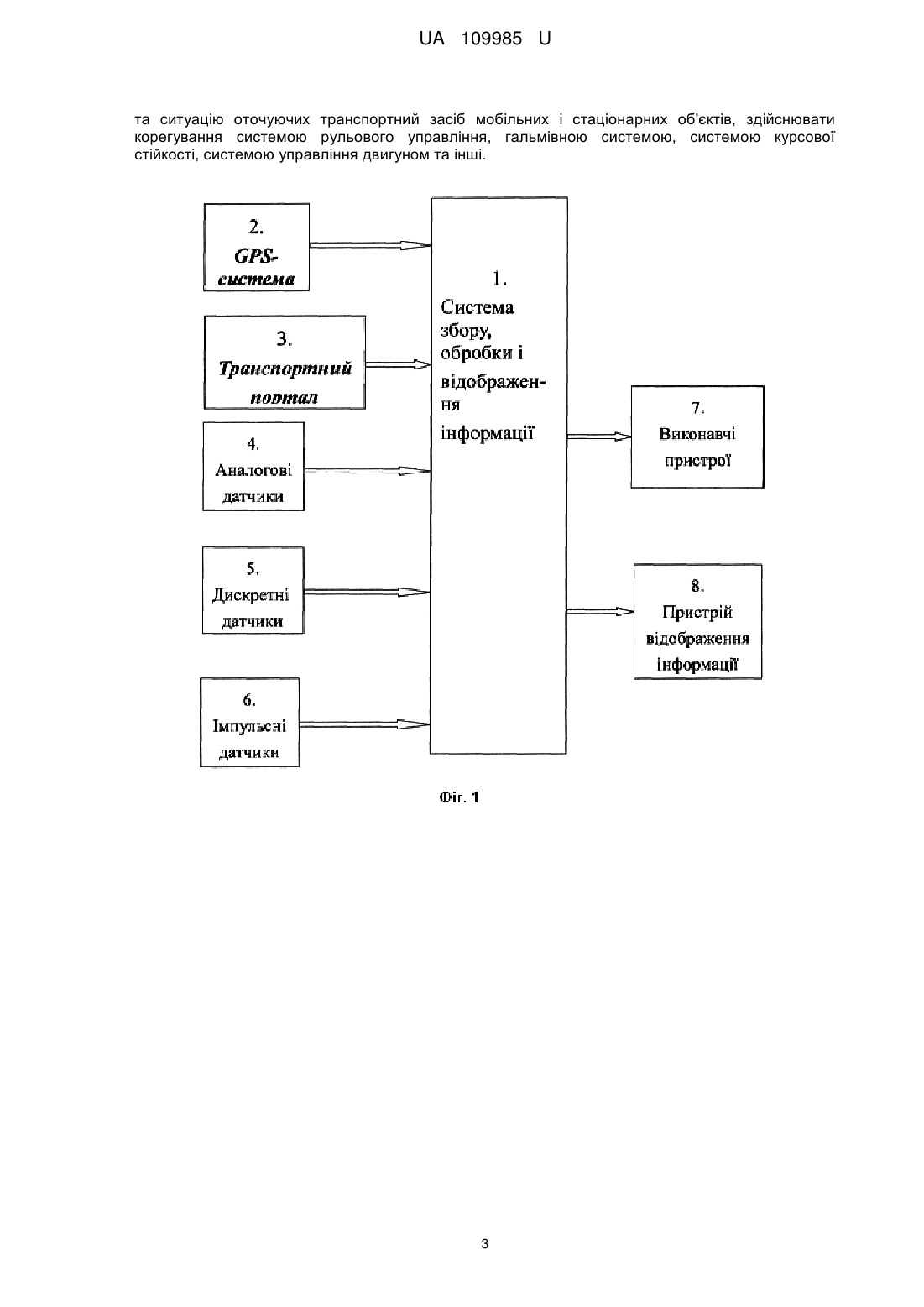
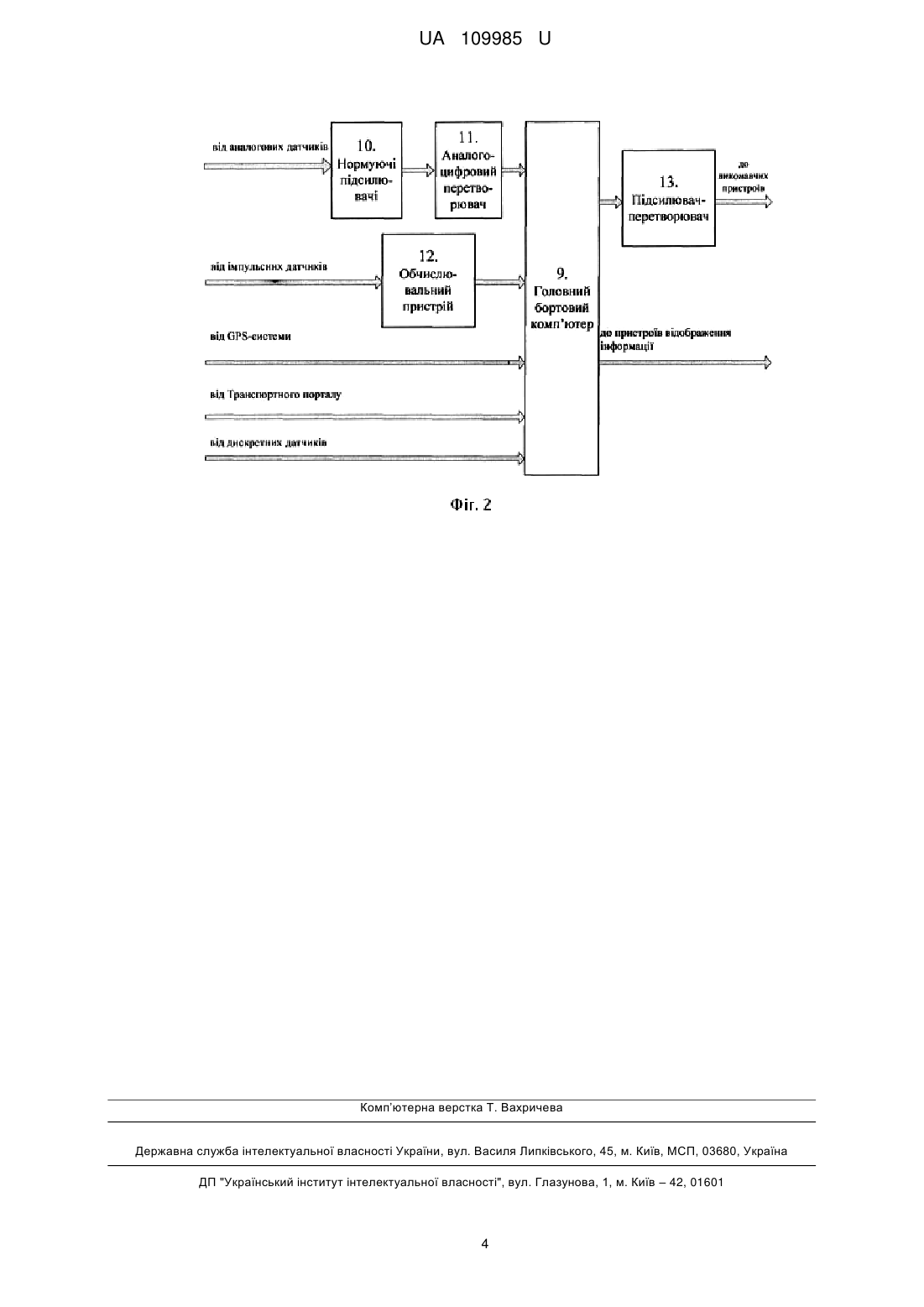
Реферат: Інтелектуальна система керування безпілотним автомобілем містить датчики збору з передавачем інформації про стан руху транспортного засобу, які з’єднані з головним бортовим комп'ютером, який з’єднаний з виконавчими пристроями та з пристроєм відображення інформації. На безпілотному автомобілі додатково встановлено GPS-систему та транспортний портал, які виконані з можливістю отримувати та обробляти дані у реальному режимі часу про положення транспортного засобу на дорозі, його швидкість руху та ситуацію оточуючих транспортний засіб мобільних і стаціонарних об'єктів, здійснювати корегування системою рульового управління, гальмівною системою, системою курсової стійкості, системою управління двигуном та інші. UA 109985 U (12) UA 109985 U UA 109985 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі машинобудування, зокрема до систем керування інтелектуальними системами, які керують як процесами в агрегатах і вузлах, так і процесом руху автомобіля в цілому. Найбільш близькою до запропонованої системи є система керування з використанням великої кількості датчиків і виконавчих механізмів, розподілених по автомобілю, в сукупності з бортовими мікропроцесорами і контролерами, об'єднаними в багаторівневу систему управління [Мишулин Ю.Е. Аппаратная реализация бортовой информационной системы транспортного средства / Ю.Е. Мишулин, Е.Ю. Мишулин, В.А. Шахнин // Фундаментальные исследования. 2012. - № 3. - С. 113-119], що представляє собою комплекс засобів для автоматичної оцінки технічного стану машини в процесі виконання функціональних завдань. Принцип роботи системи полягає в тому, що сигнали з датчиків, встановлених на транспортному засобі (ТЗ), надходять в аналізатор, який формує висновок і видає його у вигляді інформації про стан контрольованого об'єкта. Описаний принцип здійснюється за допомогою комплексу, що складається з наступних елементів: 1) комплекту датчиків, що відтворюють інформацію від об'єктів, які вони діагностують; 2) перетворювачів, які беруть сигнали від датчиків і перетворюють їх у вигляд, зручний для подальшої обробки; 3) пристроїв обробки інформації, які проводять оцінку отриманих даних за заданою програмою і видають кінцеві результати у вигляді електронних сигналів. Для оцінки стану та поведінки транспортного засобу (ТЗ) використовується інформація, що одержана з наступних датчиків, розташованих на автомобілі: - датчики тиску вимірюють тиск масла в коробці передач, двигуні внутрішнього згоряння (ДВЗ), гідросистемі, пневмосистемі; - датчики температури для вимірювання температури охолоджуючої рідини ДВЗ, масла в ДВЗ, охолоджуючої рідини в компресорі, масла в гідросистемі; - відеокамери, тепловізори. Перераховані датчики є аналоговими і мають різні діапазони вимірювання. Переважна кількість датчиків мають нелінійну характеристику. Використовуються також дискретні датчики, що працюють як сигналізатори, такі як сигналізатор критичної температури охолоджуючої рідини, аварійного тиску масла і інші, кінцеві вимикачі головного фрикціону, вентилятори. Ще один тип датчиків - імпульсні датчики, такі, як лідари, радари, ультразвукові датчики, що формують послідовність імпульсів та оцінюють наявність об'єкта на основі інтерпретації відбитого від нього сигналу. Як інформаційно-керуюча система використовується головний бортовий комп'ютер, що виконує збір та обробку інформації з датчиків, а також формує інформаційні повідомлення та управляючі сигнали на виконавчі механізми. Для підключення датчиків до головного бортового комп'ютера необхідно виконати обробку сигналів. До обробки сигналів належить нормування сигналу (посилення), тобто приведення його до певного значення, фільтрація, лінеаризація, аналого-цифрове перетворення та інші види обробки. До недоліків розглянутої інтелектуальної системи керування безпілотним автомобілем належить відсутність отримання інформації головним бортовим комп'ютером про постійні зміни транспортного середовища, тобто відсутність повної інформації про стан дороги. В основу корисної моделі поставлена задача вдосконалення інтелектуальної системи керування безпілотним автомобілем, у якій застосування транспортного порталу та GPSсистеми поліпшує процес використання інтелектуальної системи та її надійність. Поставлена задача вирішується інтелектуальною системою керування безпілотним автомобілем, що містить датчики збору з передавачем інформації про стан руху транспортного засобу, які з'єднані з головним бортовим комп'ютером, який з'єднаний з виконавчими пристроями та з пристроєм відображення інформації. На безпілотному автомобілі додатково встановлено GPS-систему та транспортний портал, які виконані з можливістю отримувати та обробляти дані у реальному режимі часу про положення транспортного засобу на дорозі, його швидкість руху та ситуацію оточуючих транспортний засіб мобільних і стаціонарних об'єктів, здійснює корегування системою рульового управління, гальмівною системою, системою курсової стійкості, системою управління двигуном та інші. Суть корисної моделі пояснюють креслення. На фіг. 1 представлено структурну схему інтелектуальної системи керування безпілотним автомобілем за допомогою транспортного порталу та GPS-системи, яка складається з датчиків збору даних 4, 5, 6 з транспортним порталом 3 та GPS-системою 2, системи збору, обробки і відображення інформації 1, пристрою відображення інформації 8 та виконавчих пристроїв 7. 1 UA 109985 U 5 10 15 20 25 30 35 40 45 50 На фіг. 2 представлено структурну схему системи збору, обробки і відображення інформації 1, яка складається з головного бортового комп'ютера 9, нормуючих підсилювачів 10, аналогоцифрового перетворювача 11, обчислювального пристрою 12 та підсилювача-перетворювача 13. На систему збору, обробки і відображення інформації 1 надходять сигнали з аналогових датчиків 4 (коробки передач, педалі акселератора, педалі зчеплення, педалі гальм, рульового колеса, відеокамер, тепловізора), дискретних датчиків 5 (сигналізатор критичної температури охолоджуючої рідини, аварійного тиску масла, кінцеві вимикачі головного фрикціону), імпульсних датчиків 6 (радарів, ультразвукових датчиків, лідара), дані з транспортного порталу 3 та карти збору даних, що входить до складу GPS-системи 2. Система збору, обробки і відображення інформації 1 за допомогою нормуючих підсилювачів 10 та аналого-цифрового перетворювача 11 обробляє сигнали з аналогових датчиків 4, за допомогою обчислювального пристрою 12 обробляє сигнали з імпульсних датчиків 6. Далі усі сигнали надходять до головного бортового комп'ютера 9, який управляє усіма обчислювальними і керуючими задачами. Пристрій відображення інформації 8 відображає всю відповідну інформацію. На виконавчі пристрої 7 сигнали від головного бортового комп'ютера 9 надходять через підсилювачперетворювач 13, виконують необхідні дії, як то підгальмовування певних коліс, зміну крутного моменту двигуна, зміну кута повороту передніх коліс, зміну ступеня демпфірування амортизаторів, при необхідності включення сигналу повороту, фар. Запропонована інтелектуальна система керування безпілотним автомобілем працює таким чином. Сигнали з GPS-системи 2, транспортного порталу 3, аналогових датчиків 4, дискретних датчиків 5, імпульсних датчиків 6, подаються на систему збору, обробки і відображення інформації 1, у якій сигнали з аналогових датчиків 4 та імпульсних датчиків 6 проходять необхідне перетворення та обробку, і далі всі дані подаються на головний бортовий комп'ютер 9, який є ключовою ланкою всієї системи. Головний бортовий комп'ютер 9 отримує інформацію про стан ТЗ та навколишнього середовища від GPS-системи 2 та транспортного порталу 3 в необхідний момент. Потім параметри керування передаються на виконавчі пристрої 7. Далі вищеописана операція повторюється. Головний бортовий комп'ютер 9 має п'ять типів входів і два типи виходів. На п'ять типів входів поступає інформація з трьох типів датчиків 4, 5, 6, транспортного порталу 3 і GPS-системи 2. З виходів надходить інформація у вигляді команд до електродвигуна електричного підсилювача рульового управління, гальмівної системи, системи курсової стійкості, системи управління двигуном та інші, та поступає інформація на пристрій відображення інформації 8, який розташовано у кабіні ТЗ. При русі ТЗ, головний бортовий комп'ютер 9 запрошує дані про місце знаходження ТЗ, який зареєстрований в базі даних транспортного порталу 3. Додатково головний бортовий комп'ютер 9 зчитує координати поворотів або перехресть через транспортний портал 3 та обробляє їх у вигляді параметрів для скоригованих даних. Головний бортовий комп'ютер 9 також відстежує місцезнаходження у реальному часі, що дозволяє йому визначити необхідне корегування системою рульового управління, гальмівною системою, системою курсової стійкості, системою управління двигуном та інші. Запропонована інтелектуальна система керування безпілотним автомобілем дозволяє підвищити ефективність використання безпілотного автомобіля за рахунок того, що головний бортовий комп'ютер завчасно отримує інформацію про повороти, перехрестя тощо, а також про мобільні та стаціонарні об'єкти, що знаходяться на шляху автомобіля. Таким чином, на основі механізму адаптації та самонавчання в автоматичному режимі враховуються постійні зміни середи руху ТЗ, оцінюються початкові характеристики і узагальнюється отримана інформація, а головне, забезпечується поліпшення в дорожній безпеці. Розроблена інтелектуальна система керування безпілотним автомобілем може бути використана для легкових автомобілів, ТЗ спеціального призначення, будівельних та дорожніх машин тощо. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 Інтелектуальна система керування безпілотним автомобілем, що містить датчики збору з передавачем інформації про стан руху транспортного засобу, які з’єднані з головним бортовим комп'ютером, який з’єднаний з виконавчими пристроями та з пристроєм відображення інформації, яка відрізняється тим, що на безпілотному автомобілі додатково встановлено GPS-систему та транспортний портал, які виконані з можливістю отримувати та обробляти дані у реальному режимі часу про положення транспортного засобу на дорозі, його швидкість руху 2 UA 109985 U та ситуацію оточуючих транспортний засіб мобільних і стаціонарних об'єктів, здійснювати корегування системою рульового управління, гальмівною системою, системою курсової стійкості, системою управління двигуном та інші. 3 UA 109985 U Комп’ютерна верстка Т. Вахричева Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B60R 25/00, G01S 3/02, B60R 1/08, B60R 1/00, G01C 21/26
Мітки: інтелектуальна, автомобілем, використанням, керування, порталу, система, gps-системи, безпілотним, транспортного
Код посилання
<a href="https://ua.patents.su/6-109985-intelektualna-sistema-keruvannya-bezpilotnim-avtomobilem-z-vikoristannyam-transportnogo-portalu-ta-gps-sistemi.html" target="_blank" rel="follow" title="База патентів України">Інтелектуальна система керування безпілотним автомобілем з використанням транспортного порталу та gps-системи</a>
Спосіб керування інтелектуальною системою безпілотного автомобіля за допомогою транспортного порталу та gps-системи
Номер патенту: 108240
Опубліковано: 11.07.2016
Автори: Полосухіна Тамара Олегівна, Ніконов Олег Якович
МПК: G01C 21/26, G08G 1/00, G01S 5/02, G01S 3/02
Мітки: автомобіля, gps-системи, системою, спосіб, безпілотного, транспортного, порталу, керування, інтелектуальною, допомогою
Формула / Реферат:
Спосіб керування інтелектуальною системою безпілотного автомобіля за допомогою транспортного порталу та GPS-системи, згідно з яким за допомогою датчиків збирають інформацію про стан руху транспортного засобу, після чого оброблена за допомогою головного бортового комп'ютера інформація надходить на виконавчі пристрої та пристрій відображення інформації, який відрізняється тим, що на автомобілі додатково встановлюються транспортний портал та...
Система керування безпілотним літальним апаратом
Номер патенту: 46179
Опубліковано: 10.12.2009
Автори: Гусарова Ганна Григорівна, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, До Куок Туан
МПК: B64C 21/00
Мітки: система, безпілотним, літальним, керування, апаратом
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, яка відрізняється тим, що в неї введені магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, п'ятого входів пристрою управління...
Система керування безпілотним літальним апаратом
Номер патенту: 55410
Опубліковано: 10.12.2010
Автори: Нгуен Ван Тхінь, Таранова Світлана Ігорівна, Кулік Анатолій Степанович, Фірсов Сергій Миколайович
МПК: B64C 21/00
Мітки: літальним, апаратом, безпілотним, система, керування
Формула / Реферат:
Система керування безпілотним літальним апаратом, яка містить пристрій управління, електричний привід, вхід якого з'єднаний з виходом пристрою управління, датчик кутової швидкості, з'єднаний з першим входом пристрою управління, датчик кута, з'єднаний з другим входом пристрою управління, магнітний курс, висотомір, GPS, виходи яких підключені до третього, четвертого, пятого входів пристрою управління відповідно, яка відрізняється тим, що в неї...
Інтелектуальна система головного світла транспортного засобу
Номер патенту: 99911
Опубліковано: 25.06.2015
Автори: Щукін Олександр Вікторович, Баранова Валентина Олегівна, Ніконов Олег Якович
МПК: B60Q 1/00, F21W 101/00, F21S 2/00
Мітки: система, засобу, інтелектуальна, головного, транспортного, світла
Формула / Реферат:
Інтелектуальна система головного світла транспортного засобу, що складається з датчиків, електронного блока керування та блока приводу, яка відрізняється тим, що в неї додатково встановлюються транспортний портал та GPS-система, за допомогою яких заздалегідь отримана інформація з урахуванням GPS-даних про положення транспортного засобу на дорозі та його швидкість руху передається з транспортного порталу через електронний блок керування...
Система керування безпілотним літальним апаратом

Номер патенту: 79320
Опубліковано: 25.04.2013
Автори: Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Таранова Людмила Ігорівна
МПК: B64C 13/00
Мітки: безпілотним, система, апаратом, керування, літальним
Формула / Реферат:
Система керування безпілотним літальнім апаратом, яка містить послідовно з'єднані задавач, мультиплексор, аналого-цифровий перетворювач, обчислювач, цифро-аналоговий перетворювач, сервопривід та об'єкт керування, другий вихід сервопривода через датчик напруги та третій нормуючий підсилювач з'єднаний з другим входом мультиплексора, третій вихід сервопривода через датчик струму та четвертий нормуючий підсилювач з'єднаний з третім входом...
Попередній патент: Спосіб визначення пластичності металів вальцюванням циліндричних зразків на клин
Наступний патент: Поживне середовище для культивування штаму irpex lacteus (fr.) fr. a-021 – продуцента ферментів молокозсідальної дії
Випадковий патент: Кристалізатор валковий