Спосіб керування інтелектуальною системою безпілотного автомобіля за допомогою транспортного порталу та gps-системи
Номер патенту: 108240
Опубліковано: 11.07.2016
Формула / Реферат
Спосіб керування інтелектуальною системою безпілотного автомобіля за допомогою транспортного порталу та GPS-системи, згідно з яким за допомогою датчиків збирають інформацію про стан руху транспортного засобу, після чого оброблена за допомогою головного бортового комп'ютера інформація надходить на виконавчі пристрої та пристрій відображення інформації, який відрізняється тим, що на автомобілі додатково встановлюються транспортний портал та GPS-система, які повідомляють у реальному режимі часу про положення транспортного засобу на дорозі, його швидкість руху та ситуацію оточуючих транспортний засіб мобільних і стаціонарних об'єктів, причому отримані дані передаються з транспортного порталу на головний бортовий комп'ютер, який відповідає за прийняття рішення щодо корегування системою рульового управління, гальмівною системою, системою курсової стійкості, системою управління двигуном та інш. і, як наслідок, забезпечує оптимальний рух на дорозі.
Текст
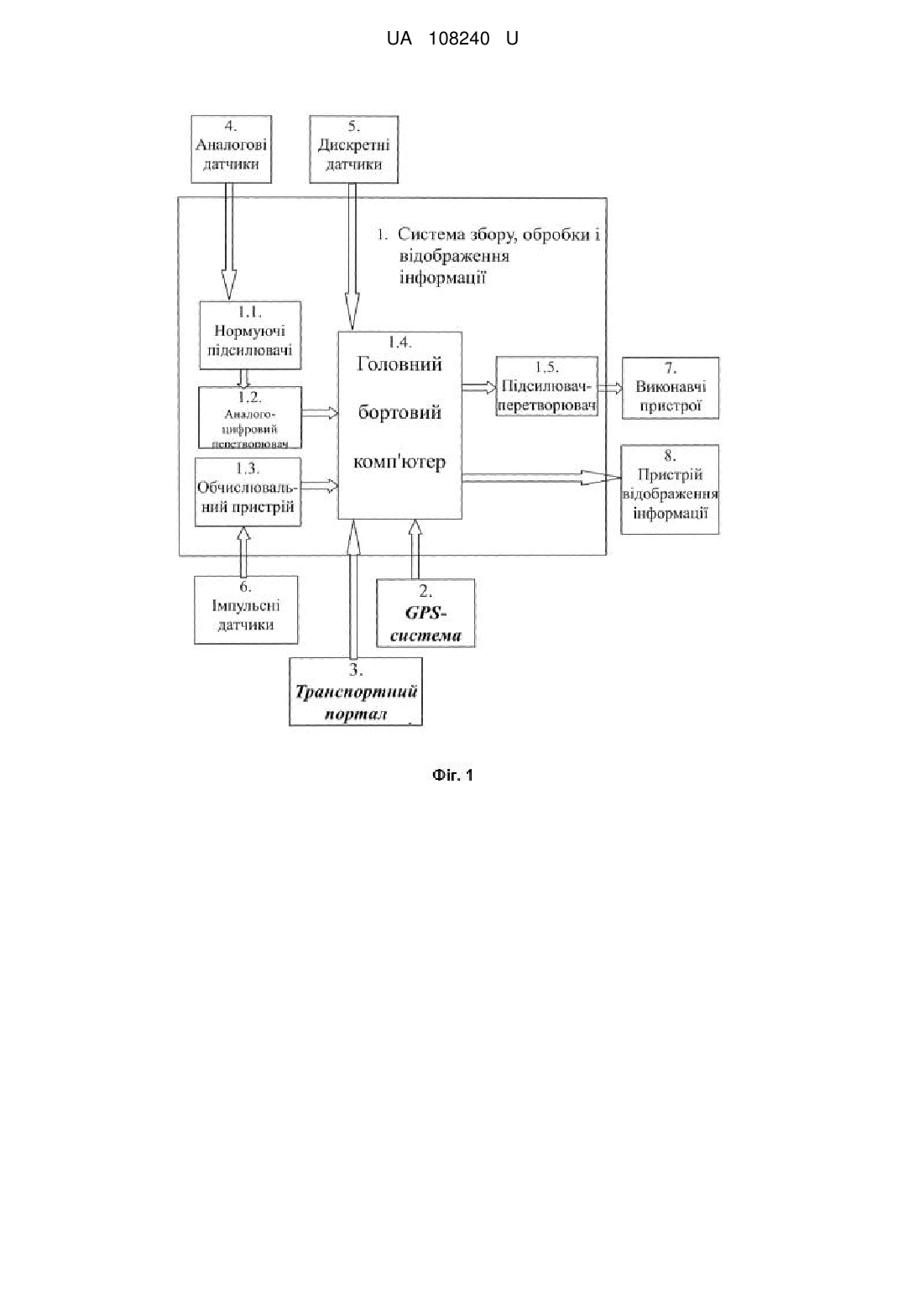
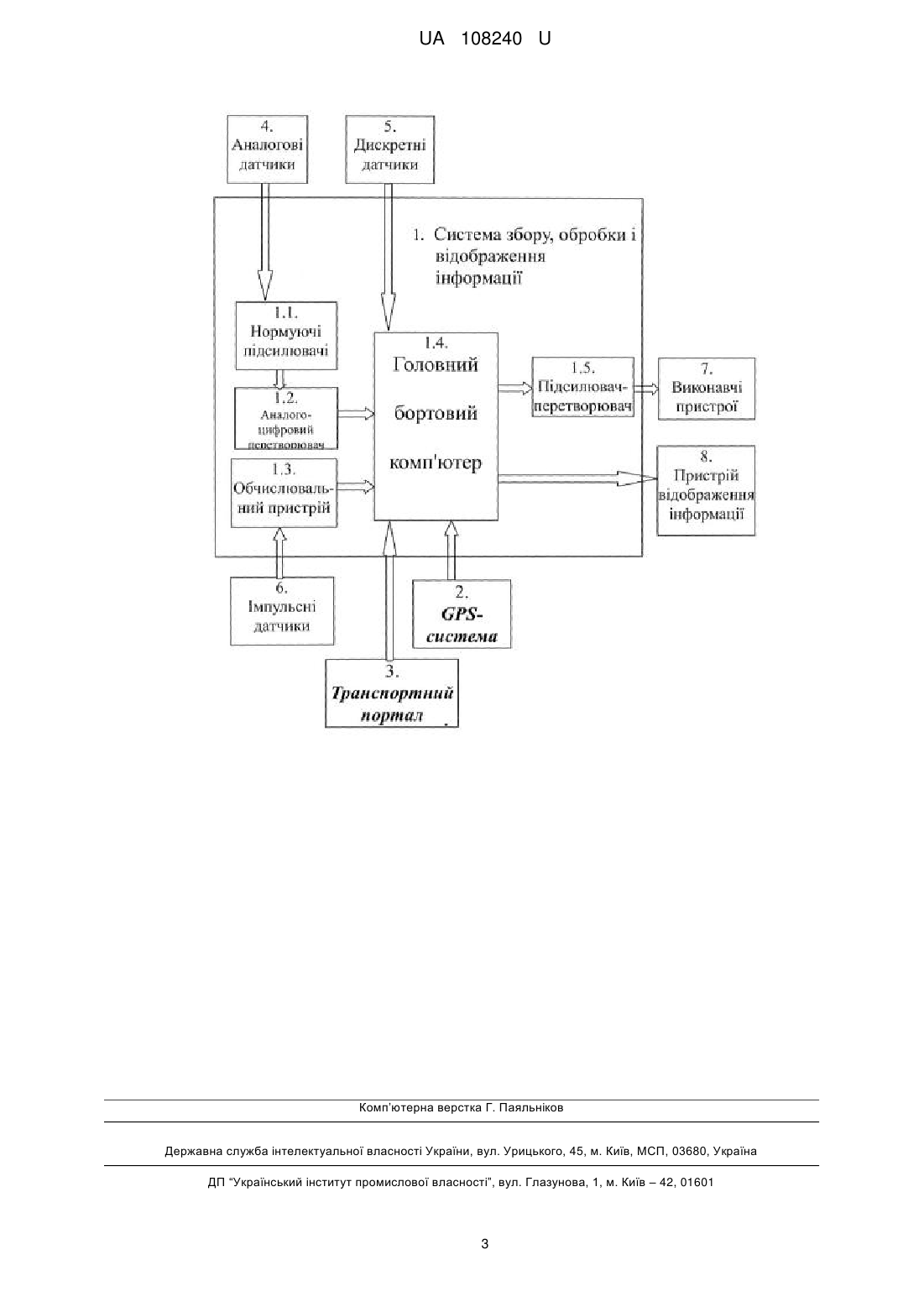
Реферат: Спосіб керування інтелектуальною системою безпілотного автомобіля за допомогою транспортного порталу та GPS-системи, згідно з яким за допомогою датчиків збирають інформацію про стан руху транспортного засобу, після чого оброблена за допомогою головного бортового комп'ютера інформація надходить на виконавчі пристрої та пристрій відображення інформації. Крім цього, на автомобілі додатково встановлюються транспортний портал та GPSсистема, які повідомляють у реальному режимі часу про положення транспортного засобу на дорозі, його швидкість руху та ситуацію оточуючих транспортний засіб мобільних і стаціонарних об'єктів, причому отримані дані передаються з транспортного порталу на головний бортовий комп'ютер, який відповідає за прийняття рішення щодо корегування системою рульового управління, гальмівною системою, системою курсової стійкості, системою управління двигуном та інш. і, як наслідок, забезпечує оптимальний рух на дорозі. UA 108240 U (12) UA 108240 U UA 108240 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, зокрема до способів керування інтелектуальною системою, яка керує як процесами в агрегатах і вузлах, так і процесом руху автомобіля в цілому. Найбільш близьким до запропонованого способу є спосіб керування з використанням великої кількості датчиків і виконавчих механізмів, розподілених по автомобілю, в сукупності з бортовими мікропроцесорами і контролерами, об'єднаними в багаторівневу систему управління [Мишулин Ю.Е. Аппаратная реализация бортовой информационной системы транспортного средства/ Мишулин Ю.Е.,Мишулин Е.Ю., Шахнин В.А.// Фундаментальные исследования. 2012. - № 3. - С. 113-119], що являє собою комплекс засобів для автоматичної оцінки технічного стану машини в процесі виконання функціональних завдань. Принцип здійснення способу полягає в тому, що сигнали з датчиків, встановлених на транспортному засобі (ТЗ), надходять в аналізатор, який формує висновок і видає його у вигляді інформації про стан контрольованого об'єкта. Описаний спосіб здійснюється за допомогою комплексу, що складається з наступних елементів: 1) комплекту датчиків, що відтворюють інформацію від об'єктів, які вони діагностують; 2) перетворювачів, які беруть сигнали від датчиків і перетворюють їх у вигляд, зручний для подальшої обробки; 3) пристроїв обробки інформації, які проводять оцінку отриманих даних за заданою програмою і видають кінцеві результати у вигляді електронних сигналів. Для оцінки стану та поведінки транспортного засобу (ТЗ) використовується інформація, одержувана з наступних датчиків, розташованих на автомобілі: - датчики тиску вимірюють тиск масла в коробці передач, двигуні внутрішнього згоряння (ДВЗ), гідросистемі, пневмосистемі; - датчики температури для вимірювання температури охолоджуючої рідини ДВЗ, масла в ДВЗ, охолоджуючої рідини в компресорі, масла в гідросистемі; - відеокамери, тепловізори. Перераховані датчики є аналоговими і мають різні діапазони вимірювання. Багато датчиків мають нелінійну характеристику. Використовуються також дискретні датчики, що працюють як сигналізатори, такі як сигналізатор критичної температури охолоджуючої рідини, аварійного тиску масла і інші, кінцеві вимикачі головного фрикціону, вентилятора. Ще один тип датчиків імпульсні датчики, такі як лідари, радари, ультразвукові датчики, що формують послідовність імпульсів та оцінюють наявність об'єкта на основі інтерпретації відбитого від нього сигналу. Як інформаційно-керуюча система використовується головний бортовий комп'ютер, що виконує збір та обробку інформації з датчиків, а також формує інформаційні повідомлення та управляючі сигнали на виконавчі механізми. Для підключення датчиків до головного бортового комп'ютера необхідно виконати обробку сигналів. До обробки сигналів належать нормування сигналу (посилення), тобто приведення його до певного значення, фільтрація, лінеаризація, аналого-цифрове перетворення та інші види обробки. До недоліків розглянутого способу керування інтелектуальною системою безпілотного автомобіля належить відсутність отримання інформації головним бортовим комп'ютером про постійні зміни транспортного середовища, тобто відсутність повної інформації про стан дороги. В основу запропонованої корисної моделі поставлено задачу вдосконалення способу керування інтелектуальною системою безпілотного автомобіля, у якому застосування транспортного порталу та GPS-системи поліпшує процес використання інтелектуальної системи та її надійність. Поставлена задача вирішується переважно завдяки тому, що збір інформації про стан дороги здійснюють не тільки за допомогою датчиків, а й за допомогою транспортного порталу та GPS-системи, які допомагають здійснити завчасну передачу інформації на бортовий комп'ютер про зустрічні ТЗ, повороти, перехрестя та інші елементи дороги. На кресленні представлено структурну схему способу керування інтелектуальною системою безпілотного автомобіля за допомогою транспортного порталу та GPS-системи, яка складається з датчиків збору даних 4, 5, 6 з транспортним порталом 3 та GPS-системою 2, системи збору, обробки і відображення інформації 1, пристрою відображення інформації 8 та виконавчих пристроїв 7. На систему збору, обробки і відображення інформації 1 надходять сигнали з аналогових датчиків 4 (коробки передач, педалі акселератора, педалі зчеплення, педалі гальм, рульового колеса, відеокамер), дискретних датчиків 5 (сигналізатор критичної температури охолоджуючої рідини, аварійного тиску масла, кінцеві вимикачі головного фрикціону), імпульсних датчиків 6 (радарів, тепловізора, ультразвукових датчиків, лідара), дані з транспортного порталу 3 та карти збору даних, що входить до складу GPS-системи 2. Система 1 UA 108240 U 5 10 15 20 25 30 35 40 збору, обробки і відображення інформації 1 за допомогою нормуючих підсилювачів 1.1 та аналого-цифрового перетворювача 1.2 обробляє сигнали з аналогових датчиків 4, за допомогою обчислювального пристрою 1.3 обробляє сигнали з імпульсних датчиків 6. Далі усі сигнали надходять до головного бортового комп'ютера 1.4, який управляє усіма обчислювальними і керуючими задачами. Пристрій відображення інформації 8 відображає всю відповідну інформацію. Виконавчі пристрої 7 виконують необхідні дії, як то підгальмовування певних коліс, зміну крутного моменту двигуна, зміну кута повороту передніх коліс, зміну ступеня демпфірування амортизаторів, при необхідності включення сигналу повороту, фар. Запропонований спосіб керування інтелектуальною системою безпілотного автомобіля здійснюється таким чином. Сигнали з GPS-системи 2,транспортного порталу 3, аналогових датчиків 4, дискретних датчиків 5, імпульсних датчиків 6 подаються на систему збору, обробки і відображення інформації 1, у якій сигнали з аналогових датчиків 4 та імпульсних датчиків 6, проходять необхідне перетворення та обробку і далі всі дані подаються на головний бортовий комп'ютер 1.4, який є ключовою ланкою всієї системи. Головний бортовий комп'ютер 1.4 отримує інформацію про стан ТЗ та навколишнього середовища від GPS-системи 2 та транспортного порталу 3 в необхідний момент. Потім параметри керування передаються на виконавчі пристрої 7. Далі вищеописана операція повторюється. Головний бортовий комп'ютер 1.4 має п'ять типів входів і два типа виходів. На п'ять типів входів надходить інформація з трьох типів датчиків 4, 5, 6, транспортного порталу 3 і GPS-системи 2. З виходів надходить інформація у вигляді команд до електродвигуна електричного підсилювача рульового управління, гальмівної системи, системи курсової стійкості, системи управління двигуном та інші та надходить інформація на пристрій відображення інформації 8, який знаходиться у кабіні ТЗ. При русі ТЗ головний бортовий комп'ютер 1.4 запрошує дані про місце знаходження ТЗ, який зареєстрований в базі даних транспортного порталу 3. Додатково головний бортовий комп'ютер 1.4 зчитує координати поворотів або перехресть через транспортний портал 3, та обробляє їх у вигляді параметрів для скоригованих даних. Головний бортовий комп'ютер 1.4 також відстежує місцезнаходження у реальному часі, що дозволяє йому визначити необхідне корегування системою рульового управління, гальмівною системою, системою курсової стійкості, системою управління двигуном та інш. Запропонований спосіб дозволяє підвищити ефективність інтелектуальної системи безпілотного автомобіля за рахунок того, що головний бортовий комп'ютер завчасно отримує інформацію про повороти, перехрестя тощо, а також про мобільні та стаціонарні об'єкти, що знаходяться на шляху автомобіля. Таким чином, на основі механізму адаптації та самонавчання в автоматичному режимі враховуються постійні зміни середовища руху ТЗ, оцінюються початкові характеристики і узагальнюється отримана інформація, а головне, забезпечується поліпшення в дорожній безпеці. Розроблений спосіб керування інтелектуальною системою безпілотного автомобіля може бути використано для легкових автомобілів, ТЗ спеціального призначення, будівельних та дорожніх машин тощо. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 Спосіб керування інтелектуальною системою безпілотного автомобіля за допомогою транспортного порталу та GPS-системи, згідно з яким за допомогою датчиків збирають інформацію про стан руху транспортного засобу, після чого оброблена за допомогою головного бортового комп'ютера інформація надходить на виконавчі пристрої та пристрій відображення інформації, який відрізняється тим, що на автомобілі додатково встановлюються транспортний портал та GPS-система, які повідомляють у реальному режимі часу про положення транспортного засобу на дорозі, його швидкість руху та ситуацію оточуючих транспортний засіб мобільних і стаціонарних об'єктів, причому отримані дані передаються з транспортного порталу на головний бортовий комп'ютер, який відповідає за прийняття рішення щодо корегування системою рульового управління, гальмівною системою, системою курсової стійкості, системою управління двигуном та інш. і, як наслідок, забезпечує оптимальний рух на дорозі. 2 UA 108240 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 5/02, G01S 3/02, G01C 21/26, G08G 1/00
Мітки: керування, транспортного, системою, автомобіля, спосіб, допомогою, порталу, інтелектуальною, безпілотного, gps-системи
Код посилання
<a href="https://ua.patents.su/5-108240-sposib-keruvannya-intelektualnoyu-sistemoyu-bezpilotnogo-avtomobilya-za-dopomogoyu-transportnogo-portalu-ta-gps-sistemi.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування інтелектуальною системою безпілотного автомобіля за допомогою транспортного порталу та gps-системи</a>
Спосіб керування інтелектуальною системою головного світла транспортного засобу
Номер патенту: 99913
Опубліковано: 25.06.2015
Автори: Щукін Олександр Вікторович, Ніконов Олег Якович, Баранова Валентина Олегівна
МПК: F21W 101/00, B60Q 1/00, F21S 2/00
Мітки: засобу, головного, інтелектуальною, світла, спосіб, системою, керування, транспортного
Формула / Реферат:
Спосіб керування інтелектуальною системою головного світла транспортного засобу, який полягає у тому, що за допомогою датчиків збирають інформацію про стан руху транспортного засобу та транспортного середовища, після чого оброблена за допомогою АСПО-контролера інформація надходить в електронні блоки освітлення, який відрізняється тим, що в процесі керування враховують заздалегідь отриману інформацію від додатково встановленого транспортного...
Пристрій з автоматизованою системою керування для індивідуальної системи опалення за допомогою перетворення електричної енергії в теплову енергію теплоносія зі зменшенням електричної потужності нагрівача теплон
Номер патенту: 39255
Опубліковано: 25.02.2009
Автор: Панченко Ігор Володимирович
МПК: F24H 7/00, F24D 10/00, F24D 15/00
Мітки: автоматизованою, електричної, потужності, індивідуальної, системі, опалення, керування, теплову, системою, нагрівача, перетворення, допомогою, теплоносія, теплон, пристрій, енергії, енергію, зменшенням
Формула / Реферат:
Пристрій з автоматизованою системою керування для індивідуального опалення приміщень за допомогою перетворення електричної енергії в теплову енергію теплоносія зі зменшенням електричної потужності нагрівача теплоносія, який відрізняється тим, що для реалізації можливості примусової, рівномірної циркуляції теплоносія; контролю та підтримки тиску теплоносія; реалізації функції використання накопиченої енергії теплоносія для відновлення...
Програмно-апаратний комплекс для виробничо-збутової системи (варіанти), спосіб його експлуатації, спосіб керування системою за допомогою комп’ютера та спосіб виконання програми комп’ютерним носієм даних
Номер патенту: 72994
Опубліковано: 16.05.2005
Автор: Сасакі Бедзі
МПК: G06Q 10/00
Мітки: системі, даних, комплекс, комп'ютерним, допомогою, системою, виконання, керування, спосіб, програми, носієм, програмно-апаратний, виробничо-збутової, експлуатації, варіанти, комп'ютера
Формула / Реферат:
1. Програмно-апаратний комплекс для виробничо-збутової системи, що передбачає залучення споживача до взаємодії по зниженню витрат виробництва-збуту, який містить засоби введення-виведення даних, друкуючі пристрої та засоби контролю, який відрізняється тим, що містить:запам'ятовуючий пристрій зберігання даних запитів із запрошеннями щодо взаємодії по зниженню витрат виробництва-збуту, з якими постачальники звертаються до споживачів з...
Рухомий пункт керування за допомогою безпілотного літального апарата

Номер патенту: 92602
Опубліковано: 26.08.2014
Автори: Башкиров Олександр Миколайович, Куровська Тетяна Юріївна, Шишацький Андрій Володимирович, Лютов Віктор Володимирович, Якобінчук Олександр Вікторович, Розум Ігор Юрійович
МПК: G11B 15/00, H04B 3/00
Мітки: літального, допомогою, апарата, рухомий, пункт, керування, безпілотного
Формула / Реферат:
Рухомий пункт керування за допомогою безпілотних літальних апаратів, до складу якого входить рухомий засіб, що містить робочі місця, персональну електронно-обчислювальну машину, приймач та передавач радіостанції рухомого засобу, та безпілотний літальний апарат, що містить відеокамеру, а також приймач та передавач радіостанції, при цьому робочі місця через електронно-обчислювальну машину з'єднані з передавачем радіостанції рухомого засобу,...
Пристрій для фітопаротерапії з інтелектуальною системою управління процедурою
Номер патенту: 93648
Опубліковано: 10.10.2014
Автор: Бадмаєв Герман Вікторович
МПК: A61F 7/00
Мітки: процедурою, пристрій, системою, інтелектуальною, фітопаротерапії, управління
Формула / Реферат:
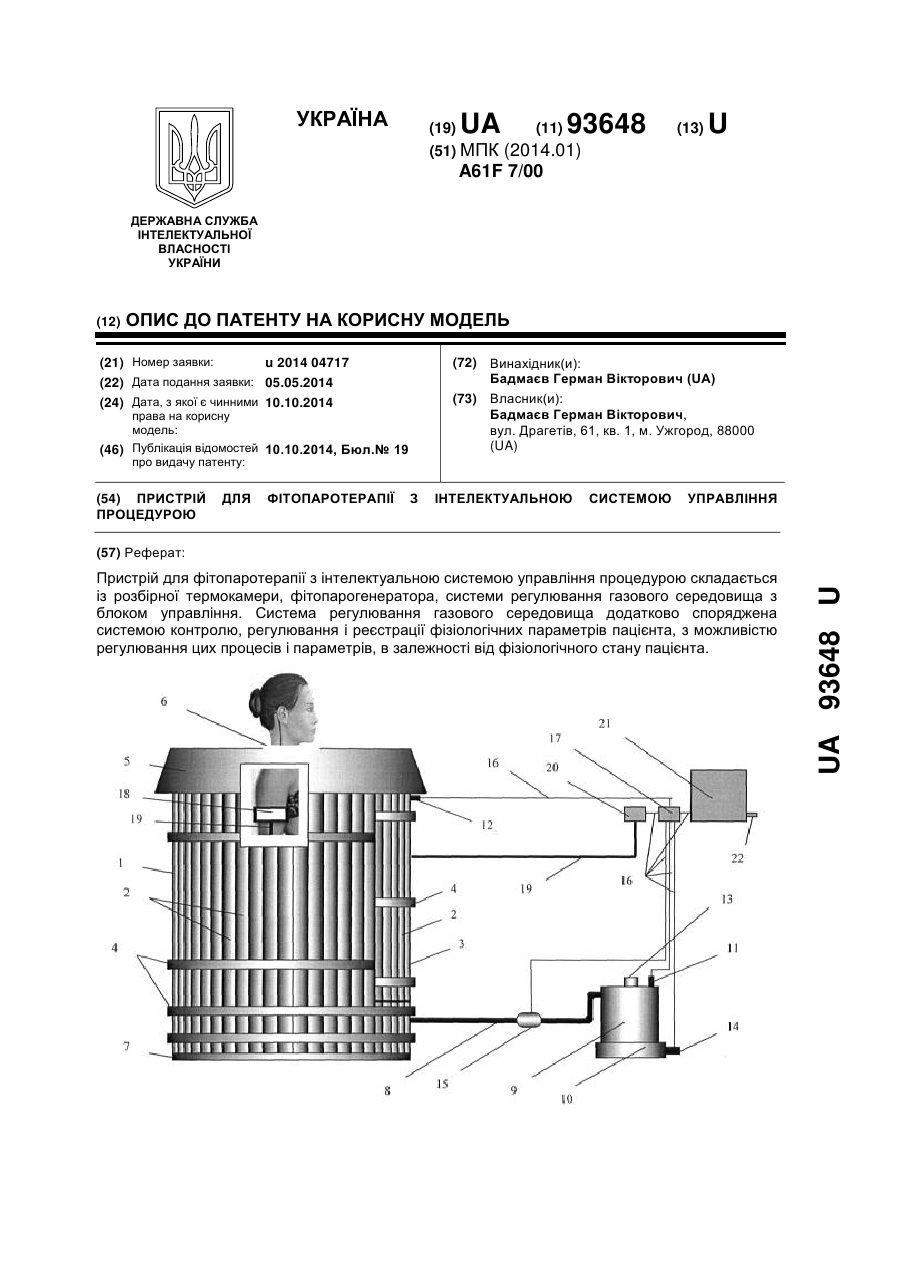
1. Пристрій для фітопаротерапії з інтелектуальною системою управління процедурою, що складається із розбірної термокамери, фітопарогенератора, системи регулювання газового середовища з блоком управління, який відрізняється тим, що система регулювання газового середовища додатково споряджена системою контролю, регулювання і реєстрації фізіологічних параметрів пацієнта, з можливістю регулювання цих процесів і параметрів, в залежності від...
Попередній патент: Пристрій для керування змінами швидкості
Наступний патент: Ізомерні бензоксазини з перфторованими моно- та біфеніленовими центральними фрагментами як мономери для полібензоксазинів
Випадковий патент: Спосіб рафінування сталі