Спосіб фіксації дорожньо-транспортної пригоди
Номер патенту: 111420
Опубліковано: 10.11.2016
Автори: Пашиєв Олександр Вікторович, Каленик Костянтин Леонідович, Алцибєєв Іван Олександрович, Дєєв Євген Володимирович

Формула / Реферат
1. Спосіб фіксації дорожньо-транспортної пригоди, що полягає у вимірюванні параметрів руху транспортного засобу за допомогою модуля позиціонування, датчиків аварійної ситуації, передачу сигналів від датчиків аварійної ситуації на приймально-передавальний пристрій і від нього на стаціонарний сервер обробки і зберігання даних, який відрізняється тим, що як датчик аварійної ситуації використовують тривісний акселерометр і гіроскоп.
2. Спосіб фіксації дорожньо-транспортної пригоди за п. 1, який відрізняється тим, що додатково отримують і передають на стаціонарний сервер інформацію про основні експлуатаційні характеристики транспортного засобу.
3. Спосіб фіксації дорожньо-транспортної пригоди за будь-яким з пп. 1 і 2, який відрізняється тим, що вимірювання і передачу інформації про основні експлуатаційні характеристики транспортного засобу здійснюють за допомогою модуля діагностики технічного стану автомобіля.
Текст
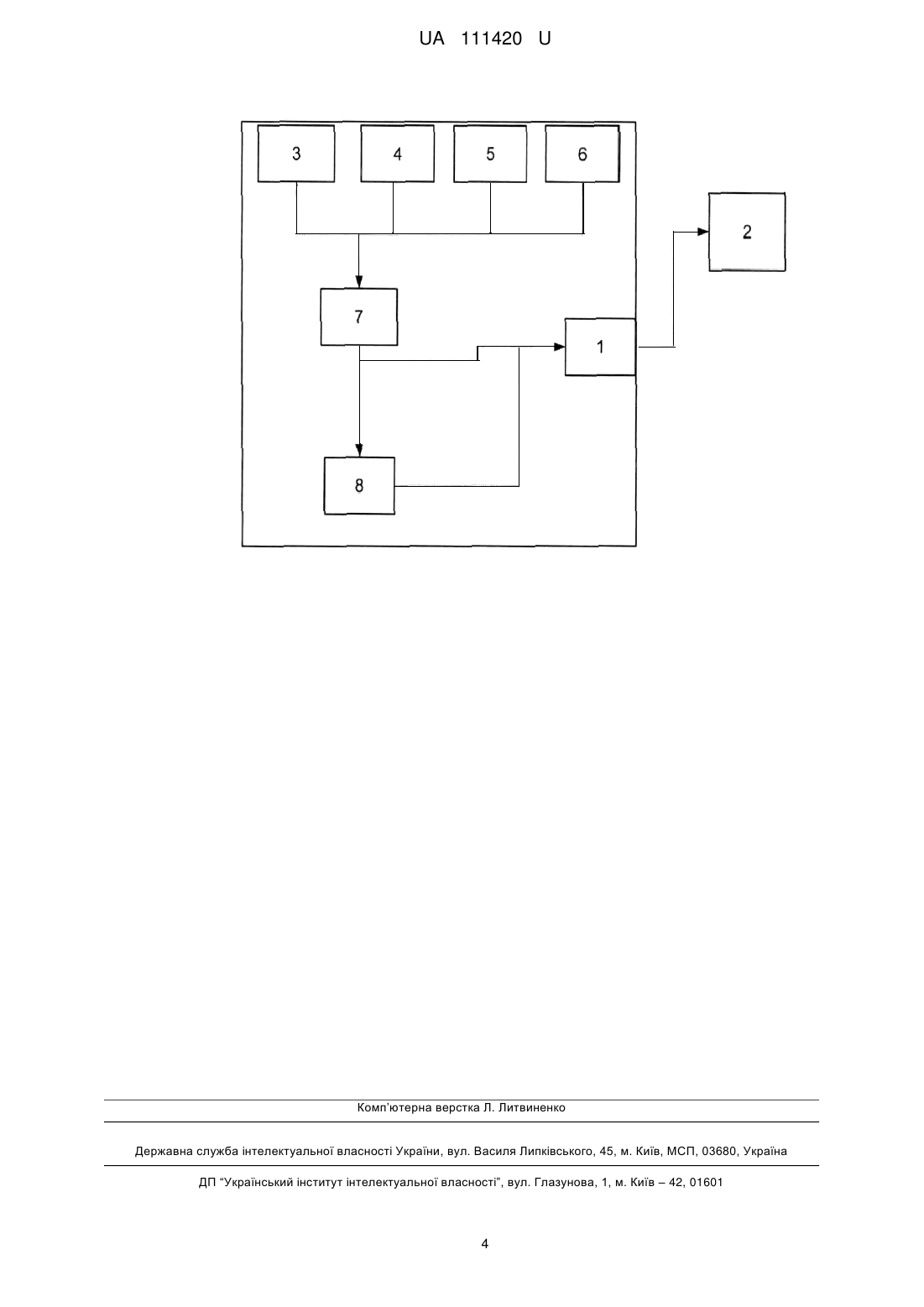
Реферат: Спосіб фіксації дорожньо-транспортної пригоди включає вимірювання параметрів руху транспортного засобу за допомогою модуля позиціонування, датчиків аварійної ситуації, передачу сигналів від датчиків аварійної ситуації на приймально-передавальний пристрій і від нього на стаціонарний сервер обробки і зберігання даних. Як датчик аварійної ситуації використовують тривісний акселерометр і гіроскоп. UA 111420 U (12) UA 111420 U UA 111420 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі контролю параметрів руху і стану транспортного засобу та може бути використана для встановлення факту та причин виникнення, а також виявлення випадків фальсифікації дорожньо-транспортних пригод, що становить особливий інтерес для страхових компаній. В теперішній час почастішали випадки інсценувань дорожньо-транспортних пригод (ДТП) з метою їх фальсифікацій, які полягають в тому, що транспортні засоби навмисно ушкоджують або видають пошкодження автомобіля, отримані за різними обставинами, за пошкодження, отримані при ДТП, з метою отримання страхових компенсацій. У зв'язку з цим виникла необхідність створення і застосування ефективного способу фіксації дорожньо-транспортної пригоди для використання страховими компаніями з метою виявлення вищезгаданих випадків фальсифікацій ДТП. Відомий спосіб фіксації ДТП, що полягає у вимірюванні параметрів руху транспортного засобу за допомогою датчиків аварійної ситуації, передачу сигналів від датчиків аварійної ситуації на приймально-передавальний пристрій і від нього на стаціонарний сервер обробки і зберігання даних (патент РФ № 2193989 "Способ построения пространственной траектории движения транспортного средства по зарегистрированным данным и устройство для его осуществления" від 2001 р., МПК B62D 41/00). У відомому способі фіксації ДТП використовують датчики бокового та вертикального перевантажень, які розміщені в передній і задній бокових частинах транспортного засобу, і датчик поздовжнього та вертикального перевантажень, розміщені в передній частині транспортного засобу. Недоліками відомого способу фіксації ДТП є необ'єктивність отриманих даних лише від акселерометра при фіксації ДТП, тому що у випадку, коли величина прискорень при зіткненні є меншою за порогове значення для ДТП, то за даними лише від акселерометра неможливо зафіксувати ДТП, крім того фіксація лише поперечних і поздовжніх прискорень не дозволяє відрізнити наїзд на вертикальну перешкоду від зіткнення при ДТП, а також відсутність врахування додаткових параметрів стану транспортного засобу, що в цілому знижує точність і достовірність результатів відомого способу фіксації ДТП. В основу цієї корисної моделі поставлена задача створення такого способу фіксації ДТП, застосування якого дозволило б підвищити достовірність фіксації ДТП. Поставлена задача вирішується тим, що в способі фіксації дорожньо-транспортної пригоди, що полягає у вимірюванні параметрів руху транспортного засобу за допомогою модуля позиціонування, датчиків аварійної ситуації, передачу сигналів від датчиків аварійної ситуації на приймально-передавальний пристрій і від нього на стаціонарний сервер обробки і зберігання даних, згідно з корисною моделлю, як датчик аварійної ситуації використовують тривісний акселерометр і гіроскоп. Згідно з корисною моделлю, додатково отримують і передають на стаціонарний сервер інформацію про основні експлуатаційні характеристики транспортного засобу. Згідно з корисною моделлю, вимірювання і передачу інформації про основні експлуатаційні характеристики транспортного засобу здійснюють за допомогою модуля діагностики технічного стану автомобіля. Використання як одного з датчиків аварійної ситуації тривісного акселерометра дозволяє фіксувати параметри як поздовжнього і поперечного, так і вертикального перевантажень транспортного засобу за допомогою одного приладу, що дозволяє виключити помилку, пов'язану з хибною фіксацією ДТП при наїзді на вертикальну перешкоду, і, таким чином, підвищує точність способу визначення значень прискорень при зіткненні транспортного засобу з перешкодою або іншим транспортним засобом. Використання як одного з датчиків аварійної ситуації гіроскопа дозволяє фіксувати зміни кута повороту автомобіля в момент зупинки при зіткненні з перешкодою або іншим автомобілем, у випадках, якщо зафіксовані акселерометром прискорення не досягнули порогових значень, при яких фіксується дорожньо-транспортна пригода, що, в свою чергу, значно підвищує точність вимірювань характеристик транспортного засобу при заявленому способі фіксації ДТП. Отримання інформації про експлуатаційні характеристики автомобіля за допомогою модуля діагностики технічного стану автомобіля і передача цієї інформації на центральний сервер дозволяють отримати об'єктивні дані про технічний стан транспортного засобу та враховувати ці дані в процесі ідентифікації та фіксації ДТП, що підвищує точність способу. Таким чином, застосування заявленого способу фіксації дорожньо-транспортної пригоди дозволяє значно підвищити точність вимірювання і достовірність сигналів фіксації ДТП, що, в свою чергу, дозволяє відрізнити випадки наїзду на вертикальну перешкоду (заїзд на бордюр, 1 UA 111420 U 5 10 15 20 25 30 35 40 45 50 55 вибоїну на дорозі), які не є дорожньо-транспортною пригодою, від зіткнення транспортних засобів і, таким чином, ідентифікувати фальсифікацію ДТП, що особливо актуально для страхових компаній для виключення необґрунтованих виплат страхових компенсацій. У пропонованому способі фіксації дорожньо-транспортної пригоди для уточнення даних фіксації, а також у випадках, коли зафіксовані акселерометром прискорення є нижчими за порогові (наприклад, у випадку зниження коефіцієнта тертя колеса і дорожнього покриття), додатково використовують показники гіроскопа, який дозволяє зафіксувати неприродно великий кут повороту автомобіля для малої швидкості при різкому зниженні швидкості або в момент зупинки транспортного засобу при зіткненні з іншим транспортним засобом або перешкодою. В подальшому корисна модель пояснюється докладним описом її виконання з посиланням на креслення, на якому представлена схема способу. При спрацьовуванні датчиків аварійної ситуації і модуля технічної діагностики сигнал передається на приймально-передавальний пристрій 1 і від нього на стаціонарний сервер обробки і зберігання даних 2. Як датчики аварійної ситуації, згідно з заявленим способом, використовують тривісний акселерометр 3 і гіроскоп 4 в mems виконанні. Процес відбувається в такий спосіб: У процесі фіксації дорожньо-транспортної пригоди сигнали від тривісного акселерометра 3, гіроскопа 4, модуля 5 технічної діагностики, виконаного у вигляді чипа для діагностики, який читає діагностичні протоколи OBD, ISO 15765-4 (CAN), ISO 14230-4 (Keyword Protocol 2000), ISO 9141-2 (Asian, European, Chrysler vehicles), SAE J1850 VPW (GM vehicles), SAE J1850 PWM (Ford vehicles), Single Wire CAN (SW-CAN) - GM proprietary network, Medium Speed CAN (MS-CAN) Ford proprietary network, ISO 15765, ISO 11898 (raw CAN), SAE J1939 OBD protocol used in heavyduty vehicles, а також координати транспортного засобу, отримані від модуля 6 позиціонування, виконаного у вигляді плати, що включає всю необхідну периферію, і GPS приймач з інтегрованою антеною, передаються в модуль 7 обробки даних, який являє собою мікроконтролер. Обробка сигналів в модулі 7 обробки даних відбувається наступним чином. На початковому етапі відбувається фільтрація даних з акселерометра 3, гіроскопа 4, модуля 5 технічного стану автомобіля за допомогою фільтрів високих частот для даних за кожною віссю тривісного акселерометра і гіроскопа. Далі за допомогою алгоритмів чисельного інтегрування показань гіроскопа визначається кут повороту автомобіля, а потім - амплітуди прискорень. У випадку, якщо при швидкості не більше 5 км/год. кут повороту, розрахований за показниками гіроскопа, змінився на 10 і більше градусів на довжині шляху меншій 3 м, дані про аварійну ситуацію передаються через приймально-передавальний пристрій 1, який являє собою плату, що включає всю необхідну периферію, GSM/GPRS/3G контролер, сполучений з GSM антеною, на сервер 2 обробки і зберігання даних. У разі, якщо будь-яке зі значень прискорення за поздовжньою віссю попадає у діапазон 1,3g
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G06F 3/0346, G07C 5/00, G06F 17/00, B62D 41/00
Мітки: дорожньо-транспортної, спосіб, фіксації, пригоди
Код посилання
<a href="https://ua.patents.su/6-111420-sposib-fiksaci-dorozhno-transportno-prigodi.html" target="_blank" rel="follow" title="База патентів України">Спосіб фіксації дорожньо-транспортної пригоди</a>
Спосіб фіксування дорожньо-транспортної пригоди

Номер патенту: 111352
Опубліковано: 10.11.2016
Автори: Атаманенко Юлія Юріївна, Куліковська Ольга Євгенівна
МПК: G03B 15/00, G08G 1/00
Мітки: спосіб, дорожньо-транспортної, пригоди, фіксування
Формула / Реферат:
Спосіб фіксування дорожньо-транспортної пригоди (ДТП), що включає розміщення на літальному апараті фотографічної апаратури, яка дозволяє отримати перспективний аерофотознімок, обліт заданої території, фотографування земної поверхні, обробку отриманої інформації, який відрізняється тим, що як літальний апарат використовують квадрокоптер, на якому розміщують фотографічну апаратуру, в якій відхилення оптичної осі від прямовисного положення не...
Спосіб об’єктивізації динаміки дорожньо-транспортної ситуації
Номер патенту: 3206
Опубліковано: 15.10.2004
Автори: Григорян Рафік Давидович, Шатров Анатолій Євгенович, Руденко Юрій Володимирович
МПК: G08G 1/09
Мітки: ситуації, спосіб, динаміки, об'єктивізації, дорожньо-транспортної
Формула / Реферат:
Спосіб об'єктивізації дорожньо-транспортної ситуації, який передбачає запис таких параметрів руху транспортного засобу як дата, час та швидкість руху, який відрізняється тим, що додатково протягом заданого періоду часу в обмежений об'єм оперативної пам'яті записують передній та задній відеоогляд з ідентифікацією номера переднього транспортного засобу і відстані до нього, повторюючи такий запис кожний заданий період часу в той же об'єм...
Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди
Номер патенту: 101717
Опубліковано: 25.04.2013
Автори: Грінченко Олена Володимирівна, Лук'янова Ольга Олексіївна, Лук'янов Олександр Михайлович, Галевич Максим Миколайович, Дохов Олександр Іванович
МПК: G01C 21/28, G08G 1/052, G08G 1/056
Мітки: руху, виникнення, дорожньо-транспортної, автоматизована, аналізу, інформації, причин, система, пригоди, автомобіля, параметри, збору
Формула / Реферат:
Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди, що включає в себе: центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GPS/GNSS-приймач, блок розподілу потоків даних, блок...
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди
Номер патенту: 91792
Опубліковано: 25.08.2010
Автори: Лук'янова Ольга Олексіївна, Лук'янов Олександр Михайлович, Дохов Олександр Іванович, Грінченко Олена Володимирівна, Сітенко Олександр Миколайович
МПК: G08G 1/056, G08G 1/052, G01C 21/26
Мітки: дорожньо-транспортної, визначення, водієм, контролю, факту, дотримання, автомобіля, пригоди, автоматизованого, виникнення, дорожнього, руху, система, правил
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні...
Інтегрована навігаційна система автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди
Номер патенту: 111045
Опубліковано: 25.10.2016
Автори: Дохов Олександр Іванович, Лук'янов Олександр Михайлович, Лук'янова Ольга Олексіївна, Катюшина Олена Володимирівна
МПК: G08G 1/052, G01C 21/28, G01S 19/49, G01C 21/36
Мітки: дорожньо-транспортної, автомобіля, дорожнього, виникнення, інтегрована, система, визначення, факту, правил, пригоди, дотримання, руху, водієм, навігаційна, автоматизованого, контролю
Формула / Реферат:
Інтегрована навігаційна система автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди, яка містить в собі центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять GNSS-приймач, блок...
Попередній патент: Відвал змінного модуля самохідного шасі
Наступний патент: Пристрій для видачі рідкого або гелеподібного мийного засобу
Випадковий патент: Глибокорозпушувач ґрунту