Спосіб оперативного керування проектом
Номер патенту: 112307
Опубліковано: 25.08.2016
Автори: Турчин Віктор Андрійович, Юшков Євген Олександрович, Назимко Віктор Вікторович, Яйцов Олександр Олексійович, Ільяшов Михайло Олександрович, Халімендиков Євген Миколайович, Зінченко Сергій Анатолійович
Формула / Реферат
1. Спосіб оперативного керування проектом, який включає вимірювання вхідного вектора параметрів стану проекту за точками прикладення збурень, передачу вхідного вектора на диференційний пристрій, порівняння диференційним пристроєм керуючих дій у вигляді правил, що задані у базі знань, і вхідного вектора виміряних параметрів стану проекту, формування керуючої дії на основі результатів порівняння, який відрізняється тим, що визначають мінімальну відстань Левенштейна між вхідним вектором параметрів стану проекту і всіма правилами, що задані у базі знань, вводять критичне значення мінімальної відстані Левенштейна, а керуючу дію формують на основі правила, що має найменшу мінімальну відстань Левенштейна, причому у випадку, коли усі правила з бази знань мають мінімальну відстань Левенштейна від вхідного вектора більшу, ніж критична, формують нове правило, мінімальна відстань Левенштейна якого від вхідного вектора параметрів стану проекту є менша за критичне значення мінімальної відстані Левенштейна і добавляють це правило у базу знань.
2. Спосіб за п. 1, в якому відстань між вхідним вектором параметрів стану проекту і всіма правилами, що задані у базі знань, визначають за допомогою алгоритму Вагнера-Фішера.
3. Спосіб за п. 1, в якому при виборі оптимального правила додатково враховують його релевантність згідно з формулою r=p*u*S/A, де р - частота використання правила, %, u - унікальність правила, %, S - схожість правила з вхідним вектором, %, А- розмір правила, %.
Текст
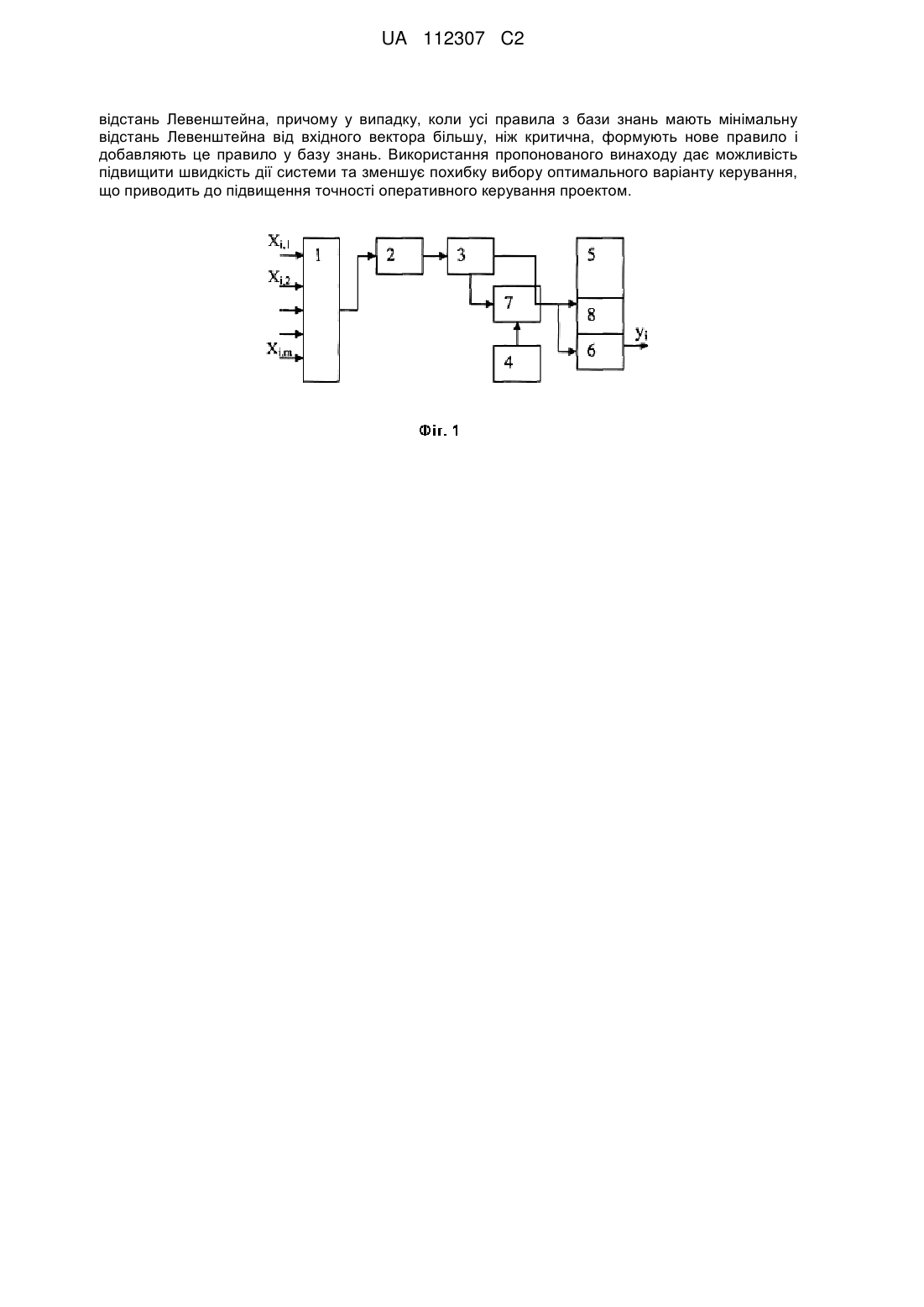
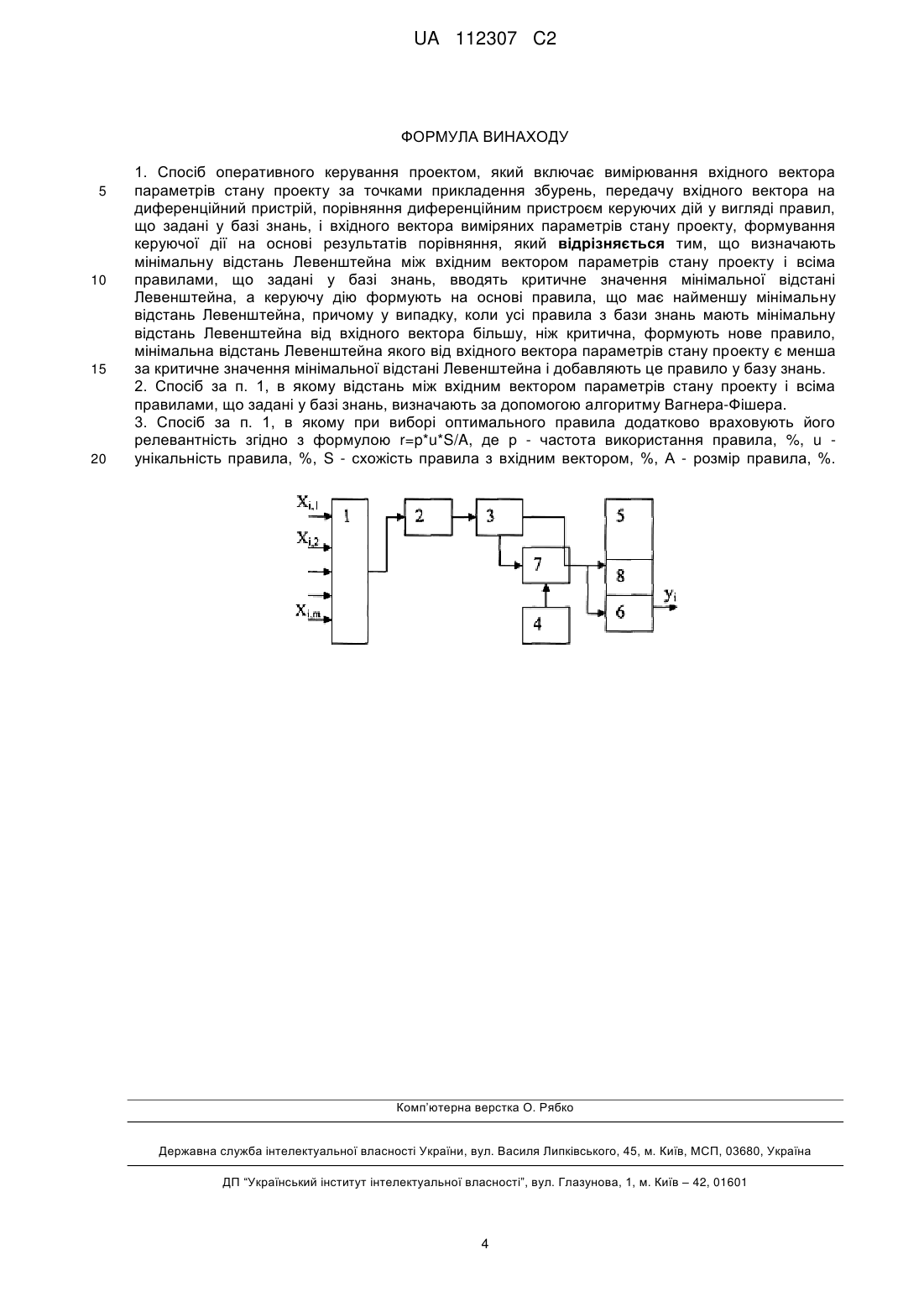
Реферат: Спосіб оперативного керування проектом належить до області керування проектами і може бути використаний для оперативного автоматизованого керування проектом в умовах браку часу на прийняття оптимального рішення. Спосіб включає вимірювання вхідного вектора параметрів стану проекту за точками прикладення збурень, передачу вхідного вектора на диференційний пристрій, порівняння диференційним пристроєм керуючих дій, що задані у базі знань, і вхідного вектора виміряних параметрів стану проекту, формування керуючої дії на основі результатів порівняння правил, при цьому визначають мінімальну відстань Левенштейна, а керуючу дію формують на основі правила, що має найменшу мінімальну UA 112307 C2 (12) UA 112307 C2 відстань Левенштейна, причому у випадку, коли усі правила з бази знань мають мінімальну відстань Левенштейна від вхідного вектора більшу, ніж критична, формують нове правило і добавляють це правило у базу знань. Використання пропонованого винаходу дає можливість підвищити швидкість дії системи та зменшує похибку вибору оптимального варіанту керування, що приводить до підвищення точності оперативного керування проектом. UA 112307 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до керування проектами і може бути використаний для оперативного автоматизованого керування проектом в умовах браку часу на прийняття оптимального рішення. Відомий спосіб керування динамічними об'єктами за заданими показниками якості керування згідно з патентом РФ № 2261466, МПК G05B11/01, опубл. 27.11.2004. Спосіб включає вимірювання вхідного вектора параметрів стану динамічного об'єкта за точками прикладення збурень, передачу вхідного вектора на диференційний пристрій, порівняння диференційним пристроєм керуючої дії, яка задана, і вхідного вектора параметрів стану об'єкта, формування керуючої дії на основі результатів порівняння. Спосіб реалізується наступним чином. Вимірюють вхідний вектор параметрів стану динамічного об'єкта за точками прикладення збурень, доповнюють значеннями параметрів, виміряних безпосередньо за точками прикладення збурень, передають вхідний вектор на диференційний пристрій і порівнюють диференційним пристроєм керуючі дії, що задані, і суми значень виміряних параметрів стану динамічного об'єкта. Недоліком способу є низька точність керування проектом у випадку, коли вказаний спосіб застосовується до керування проектом, який є типовим динамічним об'єктом, тому що параметри стану проекту представлені у вигляді суміші числових величин і нечітких семантичних понять, а дії, що задають, являють собою вербальні команди керування проектом. Точність керування губиться у процесі переведення нечітких семантичних понять і вербальних команд у числові параметри і навпаки. Найбільш близьким аналогом до способу, що заявляється, є спосіб і засоби для корегування тривалості проекту за допомогою нечіткої логіки згідно з заявкою US 2010/0030609 А, який включає вимірювання вхідного вектора параметрів стану проекту за точками прикладення збурень, передачу вхідного вектора на диференційний пристрій, порівняння диференційним пристроєм керуючих дій у вигляді правил, що задані у базі знань, і вхідного вектора виміряних параметрів стану проекту, формування керуючої дії на основі результатів порівняння правил. Як диференційний пристрій використовується машина для виводу висновків на основі нечіткої логіки, яка використовує граматику, що задається людьми. Керуючі дії стосуються у даному способі тільки корекції часу виконання окремих робіт календарного плану проекту. Спосіб реалізується наступним чином. У ході виконання проекту вимірюють компоненти вхідного вектора параметрів стану проекту за точками прикладення збурень. Одним з основних параметрів, який вимірюють, є фактична тривалість виконання окремих робіт календарного плану проекту, а також відставання або випередження графіку виконання проекту. Вхідний вектор подають на диференційний пристрій (машину для вводу висновків на основі нечіткої логіки), та здійснюють порівняння диференційним пристроєм керуючих дій у вигляді правил, що задані у базі знань, і вхідного вектора виміряних параметрів стану проекту, формування керуючої дії на основі результатів порівняння правил. У результаті порівняння правил і вхідного вектора машина відбирає найбільш підходящі правила, які можна використати для прийняття рішень по скороченню або подовженню часу виконання окремих робіт календарного плану проекту. У разі, коли машина відбирає кілька підходящих правил, остаточний вибір робить людина. Отже, недоліком способу-аналогу є недостатня точність оперативного керування проектом. Зниження точності керування обумовлена двома причинами: по-перше, у разі виникнення кількох правил остаточний вибір робить людина, що вносить суб'єктивізм у процес вибору оптимального правила для оперативного прийняття рішення. По-друге, немає кількісного критерію оптимальності керування. Машина вибирає те правило, яке найбільш схоже на вхідний вектор стану проекту. Іншими словами вибирається відносно краще правило, що не гарантує його оптимальності. Суттєві ознаки найближчого аналогу, які збігаються з ознаками об'єкта - способу, що заявляється, є наступні: 1) вимірюють вхідний вектор параметрів стану проекту за точками прикладення збурень, 2) передають вхідний вектор на диференційний пристрій, 3) порівнюють диференційним пристроєм керуючі дії у вигляді правил, що задані у базі знань, і вхідний вектор виміряних параметрів стану проекту, 4) формують керуючі дії на основі результатів порівняння правил. Задачею винаходу є вдосконалення способу оперативного керування проектом за рахунок уточнення кількісної оцінки правил прийняття рішень, що приводить до підвищення точності оперативного керування проектом. Поставлена задача вирішується тим, що у відомому способі оперативного керування проектом, що включає вимірювання вхідного вектора параметрів стану проекту за точками 1 UA 112307 C2 5 10 15 20 25 30 35 40 45 50 55 прикладення збурень, передачу вхідного вектора на диференційний пристрій, порівняння диференційним пристроєм керуючих дій, що задані у базі знань, і вхідного вектора виміряних параметрів стану проекту, формування керуючої дії на основі результатів порівняння, згідно з винаходом визначають мінімальну відстань Левенштейна між вхідним вектором стану проекту і всіма правилами, що задані у базі знань, вводять критичне значення мінімальної відстані Левенштейна, а керуючу дію формують на основі правила, що має мінімальну відстань Левенштейна, причому у випадку, коли усі правила з бази знань мають мінімальну відстань Левенштейна від вхідного вектора більшу, ніж критична, формують нове правило, мінімальна відстань Левенштейна якого від вхідного вектора параметрів стану проекту є менша за критичне значення мінімальної відстані Левенштейна і добавляють це правило у базу знань. Необов'язково, але доцільно відстань між вхідним вектором параметрів стану проекту і всіма правилами, що задані, визначати за допомогою алгоритму Вагнера-Фішера. Необов'язково, але доцільно при виборі оптимального правила врахувати його релевантність згідно з формулою r=p*u*S/A, де р - частота використання правила, %, u унікальність правила, %, S - схожість правила з вхідним вектором, %, А - розмір правила, %. Суть винаходу пояснюється рисунком, де показано схему системи оперативного керування проектом. Позицією 1 вказано блок вводу первинної інформації про поточну оперативну обстановку у вигляді вхідного вектора хі, 1,… хі, m, який має m компонент. Первинну інформацію про поточний стан виконання проекту збирають за точками прикладення збурень (на рисунку не вказані). Як збурення виступають випадкові фактори, такі як, наприклад, коливання погодних умов, коливання фінансових ринків, ринків збуту продукції чи послуг, що виготовляються проектом, випадкові коливання геологічних умов і т.п. Канал 2 для занесення вхідної інформації у бази даних, зв'язаний з блоком 3 обробки первинної інформації. Блок 4 являє собою диференційний пристрій для порівняння вхідного вектора з правилами, що занесені у базу даних 5. У блоці 6 здійснюється порівняння мінімальної відстані з критичним значенням мінімальної відстані. Спосіб оперативного керування проектом реалізується наступним чином. У ході виконання проекту періодично вимірюють компоненти вхідного вектора параметрів стану проекту х і, 1,… хі, m, за точками прикладення збурень і вводять вектор у блок 1. Компоненти вхідного вектора передаються по каналу 2 у блок обробки 3. Там компоненти фільтруються, очищаються від шуму і класифікуються. Далі компоненти вхідного вектора передаються на диференційний пристрій у вигляді блока 4. Заздалегідь у блоці 5 накопичуються на основі практичного досвіду керування проектами альтернативні правила вибору команд оперативного керування. Диференційний пристрій 4 здійснює порівняння компонент вхідного вектора х і, 1,… хі, m і правил zi, 1, і zi, 2, … і zi, m шляхом обчислення відстані між ними за допомогою алгоритму ВагнераФішера. У ході переборуусіх правил, блок 4 вибирає таке правило, яке має найменшу відстань Левенштейна відносно вхідного вектора. Блок 6 перевіряє, чи є вказана відстань меншою або рівною критичному значенню. Якщо так, правило yi використовують для генерації команди керування. У протилежному випадку подається команда у блок 7 для вироблення нового правила, відстань якого буде меншою за критичне значення. Це правило створюється експертами (тобто людьми) і заноситься у базу знань. В додаток при врахуванні релевантності правила підвищується точність керування проектом. Так, чим частіше застосовується правило, чим більш воно є унікальним, чим більше правило схоже на вхідний вектор і чим менше розмір правила (тобто енергія, вартість та трудомісткість його реалізації), тим оптимальнішим правило є. Практичне використання способу оперативного керування проектом і системи для його реалізації пояснюється прикладом оперативного керування проектом вуглевидобутку. У ході виконання проекту щодобово вимірювали компоненти вхідного вектора параметрів стану проекту хі, 1,… хі, m за точками прикладення збурень, а саме у очисному вибої, який функціонує в умовах випадкових збурень геологічної будови вугільного пласта та порід, що їх уміщує, а також коливань міцності порід та газоємності масиву. Компоненти стану проекту поповнювали гірничі майстри через автоматизовані робочі місця у вигляді персональних комп'ютерів. Вектор вхідних даних на поточний момент, для якого розглядається приклад, мав чотири символьні компоненти: хi, 1 = "видобуток з лави становить 75 % від плану"; xi, 2 = "зольність вугілля на 2,5 % перевищує норму"; хі, 3 = "темпи посування очисного вибою становлять 1,5м/доб"; х і, 4= "собівартість вугілля є високою". Вказані компоненти вхідного вектора ввели у блок 1 з персональних комп'ютерів і передали по внутрішній комп'ютерній мережі у блок обробки 3. Там компоненти були профільтровані, очищені від шуму і класифіковані. За допомогою фуззі-блока перші три компоненти вхідного 2 UA 112307 C2 5 10 15 20 25 30 35 40 45 50 55 вектора були переведені у нечіткі поняття, а саме: xi, 1 = "видобуток з лави помірно відстає від плану"; хi, 2 = "зольність вугілля є високою"; xi, 3 - "темпи посування очисного вибою є низькими"; За допомогою нейромережного регулятора, який на основі накопиченого досвіду був заздалегідь натренований, визначили очисний блок проекту, як такий, що відповідає за керування отриманими на вході компонентами вхідного вектора. Настройка вагових коефіцієнтів здійснювалась згідно з залежністю: W i, j(s+1) = W i, j (s) + Θ(u, s) α(s)(xi, j(t) - W i, jv(s)), де, s - крок у часі, t - номер тестового вхідного вектора, Θ - функція сусідства, u оптимальний вхідний вектор, α - коефіцієнт релаксації. Потім компоненти вхідного вектора передали на диференційний пристрій у вигляді блока 4. Заздалегідь у блоці 5 методом аналогів досвідченими експертами були сформовані на основі практичного досвіду керування проектами вуглевидобутку альтернативні команди оперативного керування. Для вибору оптимальної команди її структуру представили у вигляді правил. Наприклад правило 1) якщо zi, 1 = "видобуток з лави дорівнює плановому" і zi, 2 = "зольність вугілля є високою" і zj, 3 = "темпи посування очисного вибою є високими" і zi, 4- "собівартість вугілля є низькою", то Ki = "застосувати способи зміцнення безпосередньої покрівлі пласта сталеполімерними анкерами". Правило 2) якщо zi, 1= "видобуток з лави помірно відстає від плану" і zj, 2 = "зольність вугілля є високою" і zi, 3 = "темпи посування очисного вибою є низькими" і zi, 4- "собівартість вугілля є високою" і zi, 5= "газоносність масиву є помірною", то Ki = "взяти помірні кредити і збільшити темпи посування очисного вибою до високого рівня". Правило 3) якщо zi, 1 = "видобуток з лави помірно відстає від плану" і zi, 2 = "зольність вугілля є високою" і zi, 3 = "темпи посування очисного вибою є низькими" і zi, 4= "собівартість вугілля є високою" і zi, 5 = "газоносність масиву є високою", то Ki = "застосувати дегазацію масиву через підземні свердловини". Правило N)… Диференційний пристрій 4 здійснив порівняння компонент вхідного вектора х і, 1,… хі, 4 і усіма правилами шляхом обчислення відстані між ними за допомогою алгоритму Вагнера-Фішера. Цей алгоритм дає можливість визначити мінімально можливу відстань, оскільки існує дуже багато варіантів перебудувати зміст правила так, щоб отримати вхідний вектор. Ця перебудова здійснюється заміною літер, їх перестановкою, вставленням нових літер і видалення літер. З'ясувалося, що відстань між вхідним вектором і умовним предикатом є мінімальна для правила (2) становить 14 %. У підсумку блок 5 керуючу дію сформував на основі правила (2), що мало мінімальну відстань, тобто система порекомендувала "взяти помірні кредити і збільшити темпи посування очисного вибою до високого рівня". У разі, коли оптимальна команда має відстань від вхідного вектора більшу, ніж критичне значення, систему доповнюють новим правилом, яке формулюється експертами. Це означає, що у ході виконання проекту трапилась така ситуація, на адекватне реагування якої ще не було ефективного правила. Отже, система вчасно попереджає спеціалістів про необхідність формулювання такого правила і навіть готовить заготовку для вказаного правила у вигляді вхідного вектора, який є основою умовного предикату нового правила. Спосіб автоматичного керування проектом вуглевидобутку був апробований як радник в шахтоуправлінні Покровське. Пакет програм був інстальований на головному комп'ютері у відділі АСУ і використовувся протягом 25 діб для керування проектом вуглевидобутку у 4 південній лаві блоку 10. Порівняння ефективності керування виконувалось за критерієм середньої величини вуглевидобутку протягом експериментального і контрольного періодів. Середня величина вуглевидобутку протягом контрольного періоду (а) становила 2120±753 тонн на добу, тоді як під час проведення експерименту вона піднялась до рівня 2453±986 тонн/добу. Оскільки дослідженнями встановлено, що розкид вуглевидобутку у очисних вибоях узгоджується з нормальним законом, було виконано порівняння статистичних вибірок за допомогою t-тесту. З'ясувалося, що з надійністю 86,1 % можна стверджувати, що збільшення середнього вуглевидобутку є наслідком застосування електронної системи як радника з керування проектом, що свідчить про його безумовну ефективність. Підвищення вуглевидобутку з лави відбулось за рахунок збільшення точності і оперативності керування проектом вуглевидобутку. 3 UA 112307 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 1. Спосіб оперативного керування проектом, який включає вимірювання вхідного вектора параметрів стану проекту за точками прикладення збурень, передачу вхідного вектора на диференційний пристрій, порівняння диференційним пристроєм керуючих дій у вигляді правил, що задані у базі знань, і вхідного вектора виміряних параметрів стану проекту, формування керуючої дії на основі результатів порівняння, який відрізняється тим, що визначають мінімальну відстань Левенштейна між вхідним вектором параметрів стану проекту і всіма правилами, що задані у базі знань, вводять критичне значення мінімальної відстані Левенштейна, а керуючу дію формують на основі правила, що має найменшу мінімальну відстань Левенштейна, причому у випадку, коли усі правила з бази знань мають мінімальну відстань Левенштейна від вхідного вектора більшу, ніж критична, формують нове правило, мінімальна відстань Левенштейна якого від вхідного вектора параметрів стану проекту є менша за критичне значення мінімальної відстані Левенштейна і добавляють це правило у базу знань. 2. Спосіб за п. 1, в якому відстань між вхідним вектором параметрів стану проекту і всіма правилами, що задані у базі знань, визначають за допомогою алгоритму Вагнера-Фішера. 3. Спосіб за п. 1, в якому при виборі оптимального правила додатково враховують його релевантність згідно з формулою r=p*u*S/A, де р - частота використання правила, %, u унікальність правила, %, S - схожість правила з вхідним вектором, %, А - розмір правила, %. Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюIliashov Mykhailo Oleksandrovych, Yaitsov Oleksandr Oleksiiovych, Nazymko Viktor Viktorovych
Автори російськоюИльяшов Михаил Александрович, Яйцов Александр Алексеевич, Назимко Виктор Викторович
МПК / Мітки
МПК: G05B 11/06, G06Q 10/06
Мітки: оперативного, керування, проектом, спосіб
Код посилання
<a href="https://ua.patents.su/6-112307-sposib-operativnogo-keruvannya-proektom.html" target="_blank" rel="follow" title="База патентів України">Спосіб оперативного керування проектом</a>
Спосіб оперативного керування режимом електроенергетичної системи
Номер патенту: 22796
Опубліковано: 25.04.2007
Автори: Баришев Юрій Володимирович, Дудатьєв Андрій Веніамінович
МПК: G05B 17/00
Мітки: керування, режимом, оперативного, електроенергетичної, спосіб, системі
Формула / Реферат:
Спосіб оперативного керування режимом електроенергетичної системи шляхом вироблення керуючих дій на засоби регулювання на підставі відхилення параметрів поточного режиму, отриманих з телевимірювальної системи, де інформацію з хибними та частково відсутніми даними телевимірювальної системи верифікують, а параметри режиму неоглядових фрагментів мереж продукують нейтронною мережею з наперед введеними можливими поточними параметрами...
Спосіб оперативного керування системою подачі та розподілу води
Номер патенту: 44454
Опубліковано: 15.02.2002
Автор: Петросов Валерій Альбертович
МПК: F17D 5/02
Мітки: керування, оперативного, розподілу, води, подачі, системою, спосіб
Формула / Реферат:
1. Спосіб оперативного керування системою подачі та розподілу води, що складається із насосної станції та обладнаної датчиками водопровідної мережі, який полягає в керуванні нею змонтованими на мережі датчиками контролю її визначальних параметрів, який відрізняється тим, що керування системою додатково до змонтованого у найвищій точці водоводу датчика тиску виконують одночасно також за допомогою витратоміра або приладу заміру гідравлічного...
Спосіб оперативного керування комплексом процесів збагачення вугілля, працюючих на сумарний концентрат
Номер патенту: 64990
Опубліковано: 15.03.2004
Автор: Зубов Дмитро Анатолійович
МПК: B03B 13/00
Мітки: процесів, оперативного, збагачення, спосіб, працюючих, вугілля, комплексом, керування, концентрат, сумарний
Формула / Реферат:
Спосіб оперативного керування комплексом процесів збагачення вугілля, працюючих на сумарний концентрат, який полягає у визначенні оптимальних режимів збагачення шляхом прогнозування очікуваних результатів збагачення з корекцією показників при зміні зольності вихідної шихти і норм засмічення продуктів збагачення, додаткового шламоутворення, який відрізняється тим, що обчислення оптимальних завдань зольності і продуктивності по концентрату при...
Спосіб управління проектом дегазації високонавантаженого діючого очисного вибою
Номер патенту: 102953
Опубліковано: 27.08.2013
Автори: Гречко Тетяна Костянтинівна, Пономаренко Олена Вікторівна, Пілюшенко Віталій Лаврентійович, Бокій Борис Всеволодович, Назимко Віктор Вікторович, Захарова Людмила Миколаївна
МПК: E21F 7/00
Мітки: очисного, дегазації, високонавантаженого, діючого, проектом, спосіб, управління, вибою
Формула / Реферат:
1.Спосіб управління проектом дегазації високонавантаженого діючого очисного вибою, який включає вимірювання швидкості газовиділення метану із виробленого простору, та концентрації метану, дегазацію виробленого простору через наземні свердловини, дегазацію виробленого простору через підземні свердловини, дегазацію виробленого простору газовідсмоктуванням для підтримки безпеки підземних робіт у діючому очисному вибої, вимірювання витрат...
Пристрій оперативного контролю керування технологічними параметрами при переробці мінеральної сировини
Номер патенту: 78996
Опубліковано: 10.04.2013
Автори: Трачук Аннаіт Альбертівна, Азарян Володимир Альбертович, Серебреников Едуард Вадимович, Азарян Альберт Арамаісович
МПК: G01N 23/203
Мітки: переробці, параметрами, контролю, оперативного, мінеральної, керування, пристрій, сировини, технологічними
Формула / Реферат:
Пристрій оперативного контролю і керування технологічними параметрами при переробці мінеральної сировини на конвеєрі, що містить джерело і детектор іонізуючого випромінювання, з′єднаний через перший підсилювач-формувач з першим входом послідовного порту процесора, другий вхід послідовного порту якого через другий підсилювач-формувач з′єднаний з датчиком руху конвеєрної стрічки, третій вхід послідовного порту з′єднаний з...
Попередній патент: Похідні піримідину і їх застосування як пестицидів
Наступний патент: Знімання кожухів голки зі шприців і автоматичних ін’єкційних пристроїв
Випадковий патент: Заряд динамічного захисту