Автоматизована система визначення астрономічних координат і відхилень прямовисних ліній
Номер патенту: 115005
Опубліковано: 28.08.2017
Автори: Коберник Інна Михайлівна, Железняк Олег Олександрович, Малік Тетяна Миколаївна, Бурачек Всеволод Германович
Формула / Реферат
Автоматизована система визначення астрономічних координат і відхилень прямовисних ліній, що основана на оптико-електронному методі візування зірок поблизу зеніту зі схемою поділу візирних оптико-електронних каналів: широтного і довготного, яка відрізняється тим, що складається з n візирних двоканальних астроблоків, побудованих по згаданій схемі кожний, пов'язаних в єдину систему, з розміщенням астроблоків навколо і поблизу центру астропункту на фундаментальних блоках, при цьому система містить єдиний, загальний для усіх астроблоків блок керування, блок обробки інформації, блок вибору робочої зірки, програмний блок, блок прийому сигналів часу, таймер, блок корекції часу, блок комутації, блок індикації, блок запису і зберігання інформації, блок електроживлення, GPS приймач, кожний астроблок складається з двох оптико-електронних візирних труб-каналів з ПЗЗ-матрицями, підсилювача, маятникового компенсатора горизонту і призми, що відхиляє візирну вісь по вертикалі осьового пристрою, алідади, електромеханічного приводу обертання алідади на 180°, давача контролю обертання алідади і блока оперативної пам'яті, при цьому вихід блока керування пов'язаний зі входом блоків обробки інформації і комутації, виходи астроблоків пов'язані зі входами блока комутації, вихід блока комутації пов'язаний з другим входом блока обробки інформації, виходи блока обробки інформації пов'язані зі входами блока керування, програмного блока, блока корекції часу, блока запису і зберігання інформації, виходи програмного блока пов'язані з третім входом блока обробки інформації, виходи блока корекції часу пов'язані з четвертим входом блока обробки інформації.
Текст
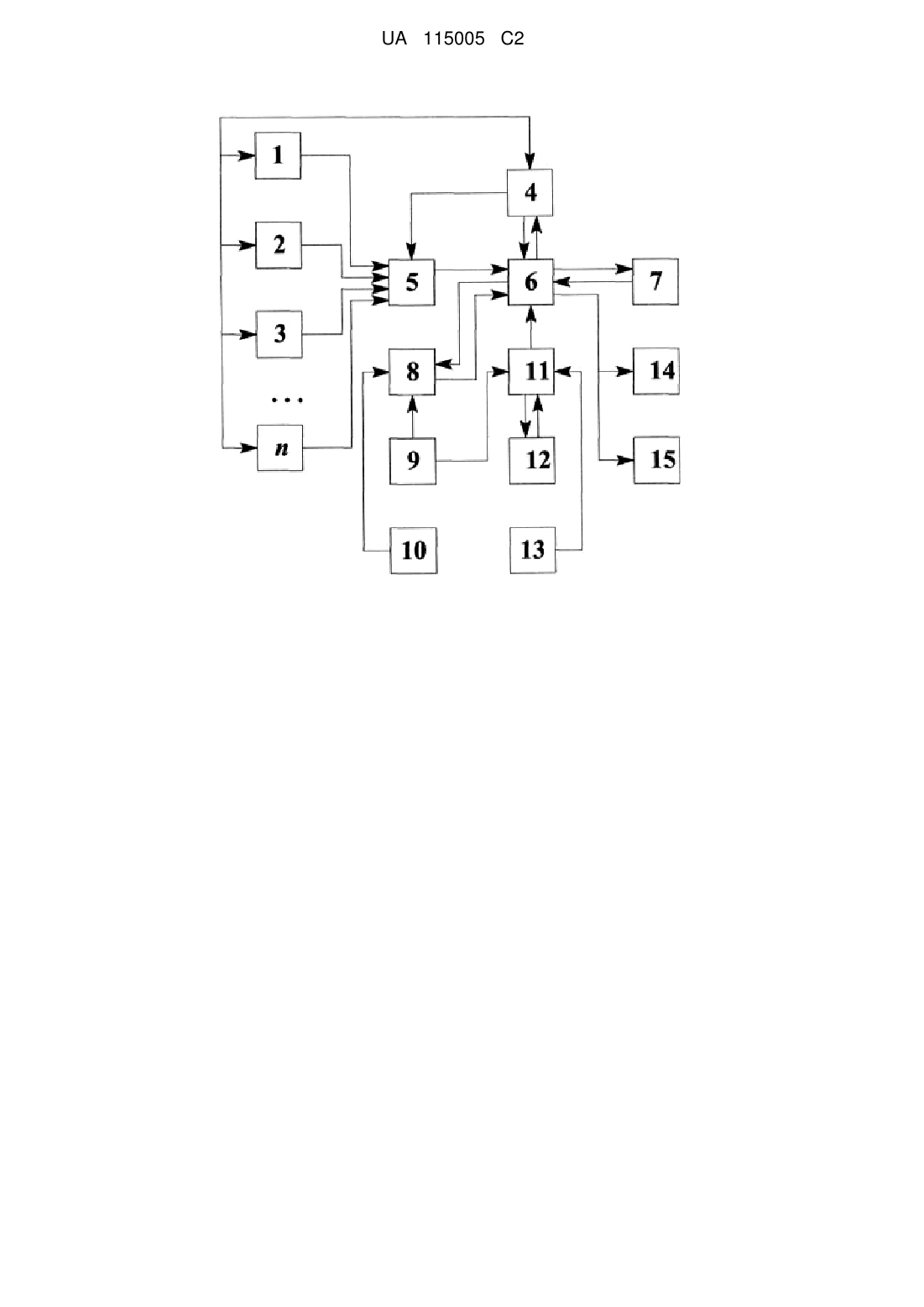
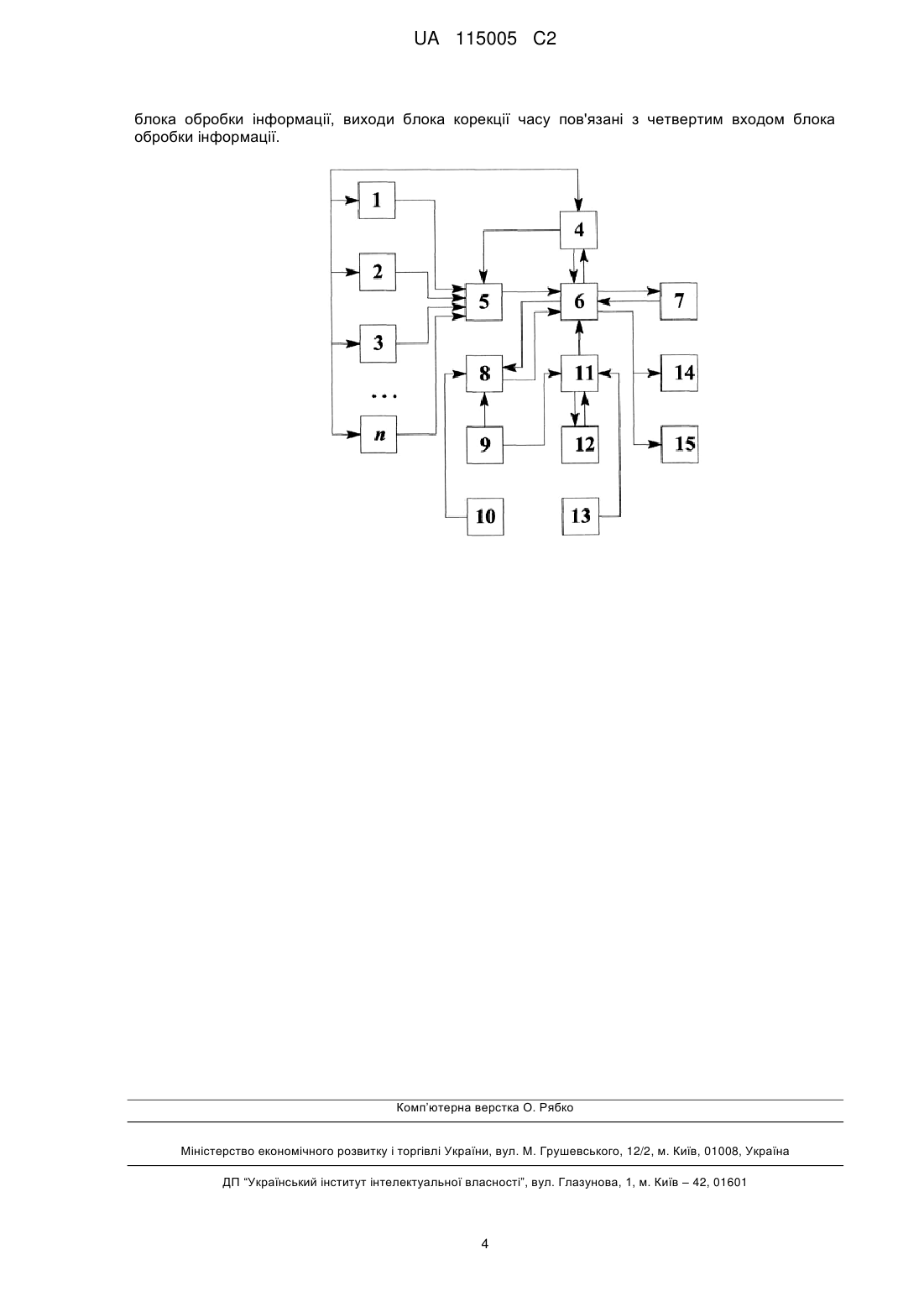
Реферат: Винахід належить до галузі практичної астрономії і геодезії. Автоматизована система визначення астрономічних координат і відхилень прямовисних ліній основана на оптикоелектронному методі візування зірок поблизу зеніту зі схемою поділу візирних оптикоелектронних каналів: широтного і довготного, складається з n візирних двоканальних астроблоків, побудованих по згаданій схемі кожний, пов'язаних в єдину систему, з розміщенням астроблоків навколо і поблизу центру астропункту на фундаментальних блоках, при цьому система містить єдиний, загальний для усіх астроблоків блок керування; блок обробки інформації, блок вибору робочої зірки, програмний блок, блок прийому сигналів часу, таймер, блок корекції часу, блок комутації, блок індикації, блок запису і зберігання інформації, блок електроживлення, GPS приймач. Технічний результат полягає у підвищенні точності визначення астрономічних координат і підвищення точності визначення відхилень прямовисних ліній. UA 115005 C2 (12) UA 115005 C2 UA 115005 C2 5 10 15 20 25 30 35 40 45 50 55 60 Автоматизована система визначення астрономічних координат і відхилень прямовисних ліній належить до галузі практичної астрономії і геодезії. Відомі візуальні методи і засоби для визначення астрономічної широти і довготи астропункту, наприклад, такі як способи вимірювання напрямків на зірки за допомогою астроуніверсалів і хронометрів [1]. Основний недолік системи даних пристроїв - недостатня точність (±0,3 кутові секунди), що не дозволяє на сьогодні розв'язати задачу підвищення точності, а також велика трудомісткість ручних робіт. Наприклад, в [2] визначено перспективну точність визначення астрономічних координат, яка оцінюється в ±0,2 кутові секунди (середня квадратична похибка). Це говорить про те, що питання підвищення точності визначення астрономічних координат на 0,1 кутову секунду є досить складною проблемою. В [3, 4] описано зенітний астроприлад з рідинним давачем вертикалі і двокоординатним відліком "мітка зеніту" на ПЗЗ-матриці. Для даного варіанту за попередніми розрахунковими даними можна отримати точність визначення астрономічних координат приблизно±0,5…1,0 кутові секунди в автоматизованому режимі вимірювань. До недоліків цих приладів можна віднести складність створення польового приладу внаслідок застосування рідинного компенсатора і недостатньо високу точність, яка не дозволяє використовувати прилад на опорних пунктах геодезичної мережі вищого класу (пунктах Лапласу). В [5] запропоновано автоматизований астроприлад з поділом вимірювальних каналів на широтні і довготні з використанням відповідно двох однокоординатних компенсаторів горизонту; основним недоліком цього астроприладу є недостатня точність - середня квадратична похибка не краще ±0,35…0,4 кутові секунди (за розрахунком), що, як і в усіх описаних вище випадках, не дозволяє розв'язати проблему досягнення точності σ=±0,2" і вище. Як прототип можна вибрати астроприлад-універсал [1], як аналог - зенітний автоматизований астроприлад [5] (загальні ознаки - окремі канали вимірювання широти і довготи з компенсатором горизонту). Задачею винаходу є створення системи, яка забезпечує підвищення точності визначення астрономічних координат і, відповідно, відхилень прямовисних ліній. Поставлена задача вирішується за рахунок створення автоматизованої система визначення астрономічних координат і відхилень прямовисних ліній, основана на оптико-електронному методі візування зірок поблизу зеніту зі схемою поділу візирних оптико-електронних каналів: широтного і довготного, відрізняється тим, що складається з n візирних двоканальних астроблоків (побудованих по згаданій схемі кожний), пов'язаних в єдину систему, з розміщенням астроблоків навколо і поблизу центру астропункту на фундаментальних блоках, при цьому система містить єдиний, загальний для усіх астроблоків блок керування; блок обробки інформації, блок вибору робочої зірки, програмний блок, блок прийому сигналів часу, таймер, блок корекції часу, блок комутації, блок індикації, блок запису і зберігання інформації, блок електроживлення, GPS приймач; кожний астроблок складається з двох оптико-електронних візирних труб-каналів з ПЗЗ-матрицями, підсилювача, маятникового компенсатора горизонту і призми, що відхиляє візирну вісь по вертикалі осьового пристрою, алідади, електромеханічного приводу обертання алідади на 180°, давача контролю обертання алідади і блока оперативної пам'яті, при цьому вихід блока керування пов'язаний зі входом блоків обробки інформації і комутації; виходи астроблоків пов'язані зі входами блока комутації, вихід блока комутації пов'язаний з другим входом блока обробки інформації, виходи блока обробки інформації пов'язані зі входами блока керування, програмного блока, блока корекції часу, блока запису і зберігання інформації, виходи програмного блока пов'язані з третім входом блока обробки інформації, виходи блока корекції часу пов'язані з четвертим входом блока обробки інформації. Технічним результатом є підвищення точності визначення астрономічних координат опорного пункту геодезичної мережі вищого класу до±0,1…0,2 кутових секунд (середня квадратична похибка) і, відповідно, підвищення точності визначення відхилень прямовисних ліній. На кресл. представлено блок-схему запропонованої автоматизованої системи визначення астрономічних координат і відхилень прямовисних ліній: 1, 2, 3,…, n - астроблоки системи; 4 - блок управління; 5 - блок комутації; 6 - блок обробки інформації; 1 UA 115005 C2 5 10 15 20 25 30 35 40 45 50 55 7 - програмний блок; 8 - блок корекції часу; 9 - таймер; 10 - блок прийому сигналів часу; 11 - блок вибору робочої зірки; 12 - блок пам'яті; 13-GPS приймач; 14 - блок індикації; 15 - блок запису і зберігання інформації. Таким чином, запропонована система складається з n-астроблоків і комплексу електронних обчислювальних засобів і приладів. Кожний астроблок 1, n складається з двох оптичних труб з фотоприймальними матрицями (широтної і довготної) і відхиляючими візирну вісь призмами і оптико-механічними компенсаторами горизонту. Також кожний астроблок містить корпус з алідадою, на якому розташовані вищевказані оптичні труби і відповідні оптико-електронні канали, пов'язаний з електроприводом, який закріплено в корпусі астроблоку; давач контролю обертання алідади на 180°; електромеханічний привід для обертання алідади; передзусилювач ПЗЗ-матриці; пристрій оперативної пам'яті; підставка-трегер з осьовим механізмом. Система працює наступним чином. При підготовці до роботи систему визначення астрономічних координат розташовують на опорному пункті вищого класу: астроблоки розміщують симетрично навколо центру астропункту на стабільних фундаментальних блоках, поблизу центру встановлюють блок GPS. При цьому виконують точне встановлення астроблоків, їх горизонтування і випробування на функціонування. Встановлення осей каналів астроблоків виконують по меридіану (канал широти) і першому вертикалу (канал довготи) з допустимою точністю ±ΔА. Попередньо вводять в блок пам'яті системи: - очікуваний момент проходження робочої зірки через зеніт t3; - кут випередження точки проходження зірки через зеніт Δλ (початок 1-го прийому вимірювань) і час випередження τΔλ; - геодезичні координати - широту і довготу. Порядок виконання астроспостережень одночасно кожним астроблоком системи. Перший прийом: 1. Режим очікування робочої зірки в полі зору до моменту t3-τΔλ. При цьому візирні лінії каналів широти і довготи астроблоків встановлено поблизу зеніту з відхиленнями від нього на малий кут в площині першого вертикалу в напрямку назустріч руху зірки. Величина даного малого кута розраховується з врахуванням паузи у вимірюваннях, яка необхідна для виконання обертання астроблока на 180° по азимуту і заспокоєння чутливого елемента компенсатора після збурюючої дії від обертання астроблока. При цьому в каналах широти осі фотоприймальних матриць повернуті на кут 45° навколо горизонтальної осі в площинах мішеней матриць. 2. В момент t3-τΔλ (при появі зірки в полях зору каналів астроблоків) блок 6 включає астроблоки 1, 2, 3,…, n. Виконується фотографування траєкторії проходження зображення робочої зірки на мішенях матриць в каналах широти і довготи астроблоків в першому прийомі. Результати електронного фотографування з матриць потрапляють в блок 4, а потім в блок 5. Сигнал про закінчення першого прийому подається на блок 6 з астроблоків 1, 2, 3,…, n. 3. По програмі блока 7, що контролюється по часу високоточним таймером 9, через блок 8 по інформаційних блоках 10 на електроприводи астроблоків подається команда на обертання алідади на 180° по азимуту і виконується задане обертання. Сигнали про закінчення обертання з астроблоків подаються в блок 6. При цьому візирні осі каналів встановлюються поблизу зеніту з відхиленнями на саме такий малий кут від зеніту, що і в першому прийомі, але в протилежному напрямку від зеніту відповідно в площині меридіану і першого вертикалу. 4. За час між закінченням першого прийому вимірювань і початком другого виконується заспокоєння чутливих елементів оптико-механічних компенсаторів астроблоків і їх стабілізація відносно горизонту. 5. По програмі блока 7 блок 5 подає команду в астроблоки на включення режиму очікування другого прийому. 2 UA 115005 C2 5 10 15 20 25 30 35 40 6. Зображення робочої зірки з'являється в полях зору каналів широти і довготи астроблоків: згідно з заданою блоком 7 програмою виконується фотографування в каналах широти і довготи таким же чином, як в першому прийомі, з передачею даних в блок 6 (через блок 5). 7. В блок 5 від астроблоків 1, 2, 3,…, n потрапляють сигнали про закінчення другого прийому вимірювань. Обробка даних фотографування і обчислення координат. 8. Блок 5 дає команду блоку 6 на визначення координат по заданій програмі. В блоці 6 за отриманими даними від астроблоків (каналів довготи і широти) і за даними блока 8 виконується оцінка середніх значень в двох напівприйомах положення точок проходження зображень зірки ліній сіток пікселів матриць каналів широти і довготи з врахуванням ефемеридного положення робочої зірки (в блоках 11, 12) із застосуванням субпіксельних методів аналізу. В каналах широти визначають середнє значення моменту проходження зірки через зеніт (лінію в площині істинного меридіана поблизу зеніту). В блоці 6 для визначення астрономічної довготи по даних каналів довготи визначається середній час меридіану спостерігача для середнього моменту спостереження, по спеціальному сигналу часу визначають гринвіцький середній час для згаданого моменту спостережень і по різниці отриманого місцевого і гринвіцького часу для середнього моменту спостережень отримують довготу точки спостережень в часовій мірі кутів і переобчислюють її в кутовій мірі. Порівнюють отриману астрономічну довготу λ з геодезичною довготою астропункту (з блока 13) і обчислюють складову η" відхилення прямовисної лінії. Одночасно в блоці 6 за даними каналів широти визначають відстань між двома виміряними в кожному астроблоці траєкторіями зображення зірки на матриці каналу широти. За даними блока 14 контролюють процес вимірювань астрономічних координат і відхилення прямовисних ліній. Отримані результати вимірювань вводять в блок 15. Таким чином, запропонована автоматизована система визначення астрономічних координат і відхилень прямовисних ліній дозволяє отримати значення астрономічних координат опорного астропункту і величину відхилення прямовисної лінії з високої точністю. Джерела інформації: 1. Закатов П.С. Курс высшей геодезии / П.С. Закатов. - М.: Недра, 1976. - 511 с. 2. Двуліт П.Д. Гравіметрія. Підручник. Львів, ЛАГТ, 1998. - 196 с. 3. Авторское свидетельство № 1196691 Фотографическая зенитная камера, 08.08.1985, Бурачек В.Г., Греку Р.Х., Дзюбенко В.И., Живов В.М. 4. Патент України на винахід № 63575 А, МПК (2006): G02B 17/00. Пристрій для спостереження зірок в зеніті/ Боровий В.О., Бурачек В.Г., Гончаренко О.С., Карпінський Ю.О., заявник та патентовласник Науково-дослідний інститут геодезії і картографії. - а2003054111: заявл. 06.05.2003: опубл. 15.01.2004, Бюл. № 1/2004. 5. Патент України на винахід № 104178, МПК (2014.01): G01С 5/00. Спосіб визначення відхилень прямовисних ліній/ Бурачек В.Г., Железняк О.О., Іванишин В.А., Коберник І.М., заявник та патентовласник Чернігівський державний інститут економіки та управління. а201113895: заявл. 25.11.2011: опубл. 10.01.2014, бюл. № 1/2014. ФОРМУЛА ВИНАХОДУ 45 50 55 60 Автоматизована система визначення астрономічних координат і відхилень прямовисних ліній, що основана на оптико-електронному методі візування зірок поблизу зеніту зі схемою поділу візирних оптико-електронних каналів: широтного і довготного, яка відрізняється тим, що складається з n візирних двоканальних астроблоків, побудованих по згаданій схемі кожний, пов'язаних в єдину систему, з розміщенням астроблоків навколо і поблизу центру астропункту на фундаментальних блоках, при цьому система містить єдиний, загальний для усіх астроблоків блок керування, блок обробки інформації, блок вибору робочої зірки, програмний блок, блок прийому сигналів часу, таймер, блок корекції часу, блок комутації, блок індикації, блок запису і зберігання інформації, блок електроживлення, GPS приймач, кожний астроблок складається з двох оптико-електронних візирних труб-каналів з ПЗЗ-матрицями, підсилювача, маятникового компенсатора горизонту і призми, що відхиляє візирну вісь по вертикалі осьового пристрою, алідади, електромеханічного приводу обертання алідади на 180°, давача контролю обертання алідади і блока оперативної пам'яті, при цьому вихід блока керування пов'язаний зі входом блоків обробки інформації і комутації, виходи астроблоків пов'язані зі входами блока комутації, вихід блока комутації пов'язаний з другим входом блока обробки інформації, виходи блока обробки інформації пов'язані зі входами блока керування, програмного блока, блока корекції часу, блока запису і зберігання інформації, виходи програмного блока пов'язані з третім входом 3 UA 115005 C2 блока обробки інформації, виходи блока корекції часу пов'язані з четвертим входом блока обробки інформації. Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 5/00, G02B 17/00
Мітки: визначення, система, ліній, координат, автоматизована, прямовисних, астрономічних, відхилень
Код посилання
<a href="https://ua.patents.su/6-115005-avtomatizovana-sistema-viznachennya-astronomichnikh-koordinat-i-vidkhilen-pryamovisnikh-linijj.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система визначення астрономічних координат і відхилень прямовисних ліній</a>
Спосіб визначення відхилень прямовисних ліній
Номер патенту: 104178
Опубліковано: 10.01.2014
Автори: Коберник Інна Михайлівна, Бурачек Всеволод Германович, Іванишин Володимир Андрійович, Железняк Олег Олександрович
МПК: G01C 5/00
Мітки: визначення, ліній, відхилень, спосіб, прямовисних
Формула / Реферат:
Спосіб визначення положення прямовисних ліній, заснований на вимірюванні координат зірок поблизу зеніту двома прийомами з поворотом оптичної труби навколо вертикальної осі на 180° та з наступним обчислюванням астрономічних координат пункту та відхилення вискової лінії, використовуючи геодезичні координати пункту, який відрізняється тим, що в кожному прийомі виконують вимірювання в двох каналах цифрової камери: широти та довготи, зі...
Пристрій для визначення відхилень прямовисних ліній
Номер патенту: 104179
Опубліковано: 10.01.2014
Автори: Бурачек Всеволод Германович, Железняк Олег Олександрович, Коберник Інна Михайлівна, Іванишин Володимир Андрійович
МПК: G01C 5/00
Мітки: відхилень, ліній, прямовисних, пристрій, визначення
Формула / Реферат:
Пристрій для визначення відхилення прямовисних ліній, що містить оптико-механічний блок, осьову систему, трегер та основу, який відрізняється тим, що оптико-механічний блок складається з двох горизонтальних довгофокусних оптичних труб, жорстко з'єднаних в єдиному корпусі алідади з кутом між оптичними осями 90°, при цьому кожна з труб обладнана оптико-механічним компенсатором горизонту, оптичним блоком відхилення візирного променя в зону...
Автоматизована система запису відхилень відстаней між жорсткими провідниками вертикальних шахтних стволів
Номер патенту: 22216
Опубліковано: 30.06.1998
Автори: Черняєв Дмитро Миколайович, Черняєв Віктор Іванович, Озеров Ілля Федорович
МПК: G01B 7/14
Мітки: запису, жорсткими, автоматизована, відхилень, стволів, шахтних, вертикальних, провідниками, відстаней, система
Формула / Реферат:
Автоматизированная система записи отклонений расстояний между жесткими проводниками вертикальных шахтных стволов, содержащая кронштейн, прикрепленный к тросику, проходящему в направляющих через блочки к поворотному барабану, причем один конец тросика жестко соединен с барабаном, а другой с пружиной, прикрепленной снаружи к этому барабану, трос для передвижения барабана, свободный конец которого прикреплен к барабану со стороны соединения...
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Мосов Сергій Петрович, Кравченко Юрій Васильович, Савченко Віталій Анатолійович, Машков Олег Альбертович
МПК: G01S 5/02
Мітки: рухомого, об'єкта, швидкості, система, координат, визначення
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Автоматизована система охорони опор ліній електропередачі
Номер патенту: 82418
Опубліковано: 25.07.2013
Автор: Магамедов Зуріко Валентинович
МПК: G08C 25/00
Мітки: автоматизована, опор, система, ліній, електропередачі, охорони
Формула / Реферат:
1. Автоматизована система охорони опор ліній електропередачі, що містить блоки охоронної сигналізації з вбудованими датчиками механічного впливу на конфігурацію опори, гучномовцем, модулем передачі даних та автономним джерелом живлення від двох незалежних джерел у вигляді сонячних батарей і акумуляторних батарей, що встановлюються на опорах, та пульти централізованого спостереження, які встановлюються в приміщенні оперативного чергового...
Попередній патент: Модифікована сушінням активована кислотою вибілююча земля, спосіб її отримання та застосування
Наступний патент: Спосіб кріоконсервування сперми осетрових риб
Випадковий патент: Пристрій для визначення проникності кернів