Спосіб визначення відхилень прямовисних ліній
Номер патенту: 104178
Опубліковано: 10.01.2014
Автори: Іванишин Володимир Андрійович, Железняк Олег Олександрович, Бурачек Всеволод Германович, Коберник Інна Михайлівна
Формула / Реферат
Спосіб визначення положення прямовисних ліній, заснований на вимірюванні координат зірок поблизу зеніту двома прийомами з поворотом оптичної труби навколо вертикальної осі на 180° та з наступним обчислюванням астрономічних координат пункту та відхилення вискової лінії, використовуючи геодезичні координати пункту, який відрізняється тим, що в кожному прийомі виконують вимірювання в двох каналах цифрової камери: широти та довготи, зі збільшенням інтервалу часу між прийомами визначення координат за рахунок орієнтації лінії візування в каналах; в каналі широти лінію візування орієнтують в площині першого вертикала та під гострим кутом до площини меридіана, а в каналі довготи - до площини меридіана та під гострим кутом до площини першого вертикала.
Текст
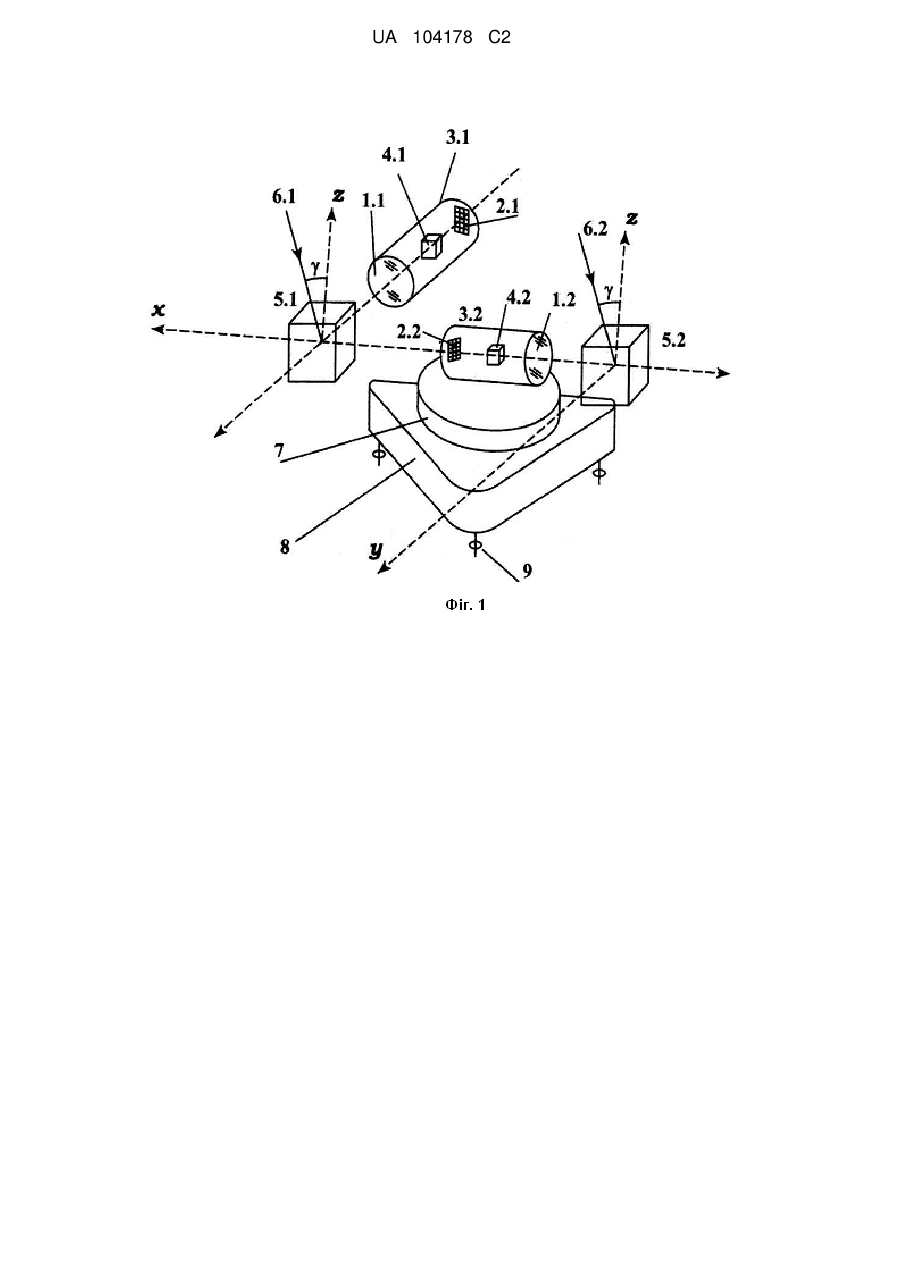
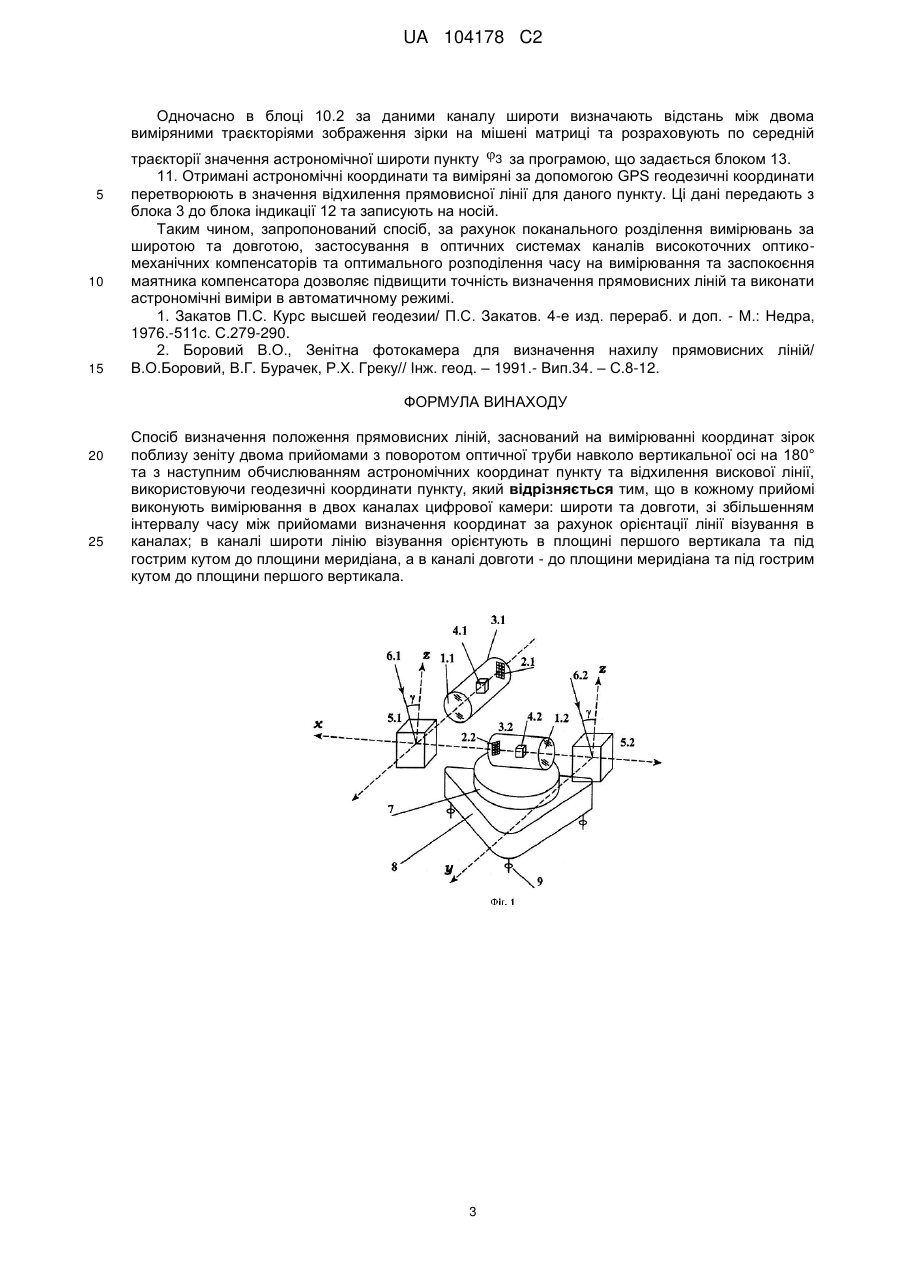
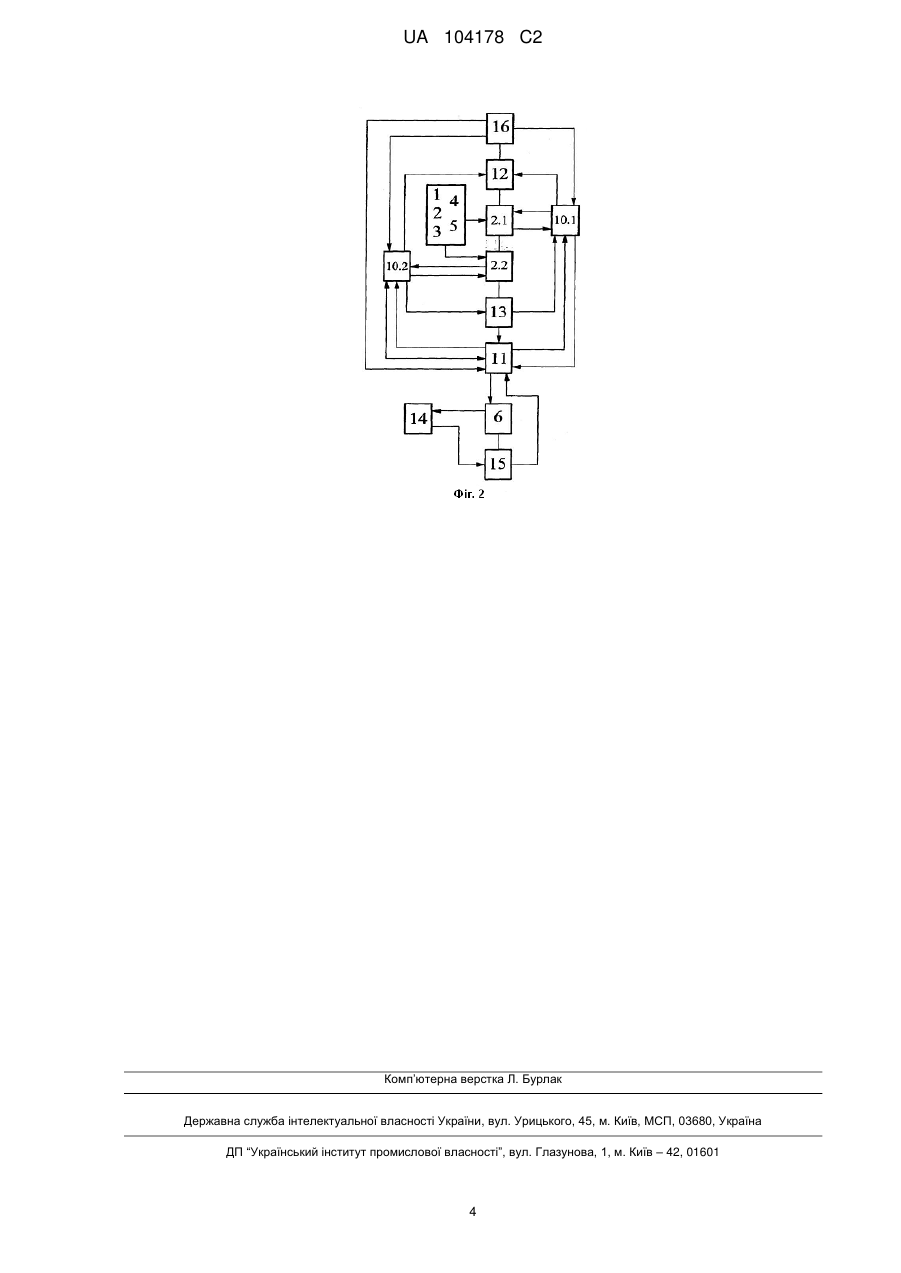
Реферат: Спосіб належить до області геодезії та астрономії. Спосіб визначення положення прямовисних ліній заснований на вимірюванні координат зірок поблизу зеніту двома прийомами з поворотом оптичної труби навколо вертикальної осі на 180° та з наступним обчислюванням астрономічних координат пункту та відхилення вискової лінії, використовуючи геодезичні координати пункту. В кожному прийомі виконують вимірювання в двох каналах цифрової камери: широти та довготи, зі збільшенням інтервалу часу між прийомами визначення координат за рахунок орієнтації лінії візування в каналах. В каналі широти лінію візування орієнтують в площині першого вертикала та під гострим кутом до площини меридіана, а в каналі довготи - до площини меридіана та під гострим кутом до площини першого вертикала. Спосіб дозволяє підвищити точність визначення прямовисних ліній та виконати астрономічні виміри в автоматичному режимі. UA 104178 C2 (12) UA 104178 C2 UA 104178 C2 5 10 15 20 25 30 35 40 45 50 55 60 Запропонований спосіб належить до області геодезії та астрономії. Відомий спосіб визначення астрономічних координат шляхом вимірювань горизонтальних та вертикальних кутів знаходження зірок теодолітами-універсалами. При цьому значення відхилень прямовисних ліній отримують як різницю астрономічних та геодезичних координат пункту [1]. Застосування цього способу дозволяє отримувати високу точність, однак вимірювання вельми трудомісткі (в ручному режимі) та займають багато часу. Тому такі вимірювання виконують тільки на пунктах вищого класу геодезії (відстань між пунктами приблизно 70-100 км). Недоліком способу через складність вимірювань є практична непридатність його для таких робіт, як детальне дослідження положення вискових ліній в районах можливих родовищ нафти та газу, створювання точних гравіметричних карт відносно геоїда на локальних територіях та ін. Відомий спосіб визначення відхилень вискових ліній, що ґрунтується на визначенні астрономічних координат через спостерігання зірок в зеніті за допомогою зенітних камер (зенітних телескопів) [2]. Зокрема, спосіб визначення відхилень вискових ліній з застосуванням переносних зенітних камер дозволяє вирішити задачі польових досліджень з отриманням достатньо високої точності для гравіметричних робіт та скорочення трудомісткості порівняно з вищеописаним способом. Недоліком способу є малий час експозиції зірки через необхідність технологічного повороту камери навколо вертикальної осі на 180° між двома прийомами спостережень, що позначається на точності вимірювань. Як аналог, який приймають за прототип, слід використовувати спосіб, що реалізується зенітною камерою [2], як такий, що має подібні ознаки з запропонованим: спостереження зірок поблизу зеніту, поворот приладу на 180° між прийомами, перетворення світлового потоку від зірки на ПЗЗ-матриці. Задачею винаходу є створення способу визначення відхилень прямовисних лінії з підвищеною точністю польовим переносним комплектом вимірювальних засобів. Поставлена задача вирішується через створення способу визначення відхилень прямовисних ліній, заснованого на вимірюванні координат зірок поблизу зеніту двома прийомами з поворотом оптичної труби навколо вертикальної осі на 180° з наступним обчислюванням астрономічних координат пункту та відхилення вискової лінії, використовуючи геодезичні координати пункту, який (спосіб) відрізняється тим, що в кожному прийомі виконують вимірювання в двох каналах цифрової камери: широти та довготи, зі збільшенням інтервалу часу між прийомами визначення координат через орієнтацію лінії візування в каналах. В каналі широти лінію візування орієнтують в площині першого вертикала та під гострим кутом до площини меридіана, а в каналі довготи - до площини меридіана та під гострим кутом до площини першого вертикала. Технічним результатом є можливість автоматизації всіх операцій вимірювань, підвищення точності визначення відхилень вискових ліній через оптимізацію орієнтації лінії візування та розподілення часу експозиції зірки в двох прийомах вимірювання. Запропонований спосіб може бути реалізований пристроєм, схема якого представлена на кресленні - фіг. 1. 1, 2, 3, 4, 5 - конструктивні вузли приладу - двоканальної оптико-електронної цифрової камери, в тому числі: 1) об'єктиви каналів (1.1 - каналу довготи, 1.2 - широти); 2) багатоелементні фотоприймальні матриці (2.1 - довготи та 2.2 - широти відповідно); 3) корпус труби каналу (3.1 - каналу довготи та 3.2 - широти); 4) компенсатори горизонту (4.1 - каналу довготи та 4.2 - широти); 5) оптичні відхиляючі блоки (5.1 - каналу довготи та 5.2 - широти); 6) світловий потік від робочої зірки, який падає на об'єктиви 1.1 та 1.2 оптико-електронного приладу: 6.1 та 6.2 відповідно (візирні лінії); 7) електромеханічний блок повороту алідади приладу 1 на 180°; 8) трегер; 9) підйомні гвинти. Всі блоки розміщені в єдиному корпусі. Оптико-електронні канали приладу жорстко зв'язані між собою, їх візирні осі розташовані в горизонтальній площині перпендикулярно одна до одної. Корпус приладу зі всіма блоками встановлений своєю вертикальною віссю на трегері, який в свою чергу розміщений та стабільно закріплений на стало закріпленому штативі чи астрономічному стовпі. До складу приладу також входить візирний пристрій для орієнтування приладу на місцевості та блок електроживлення. Блок-схема функціонування приладу показана на фіг. 2. 1 UA 104178 C2 5 10 15 20 25 30 35 40 45 50 55 Позначення на схемі: 10.1 та 10.2) - блоки обробки інформації каналів довготи та широти; 11) блок керування; 12) блок індикації; 13) програмний блок; 14) алідада; 15) датчик фіксації кута повороту алідади на 180°. При підготовці до вимірів визначають на місцевості пункт спостережень за координатами, що вимірюють комплексом GPS (або іншим способом), розраховують - момент проходження робочої зірки через зеніт t 3 ; - кут випередження точки проходження зірки через зеніт (початок 1-го прийому вимірювань) та час випередження . Послідовність операцій: 1. Установка приладу; горизонтування та опробування на функціонування. 2. Точна установка осей каналів приладу по меридіану (канал широти) і першому вертикалу (канал довготи) з допустимою точністю A. 3. Режим очікування робочої зірки в полі зору до моменту t3 . Візирні лінії каналу широти та довготи встановлюють поблизу зеніту з відхиленнями від нього на малий кут в площині першого вертикала в напряму назустріч руху зірки. Величина даного малого кута розраховується з урахуванням паузи у вимірюваннях, необхідної для виконання повороту приладу на 180° за азимутом та заспокоювання чутливого елемента компенсатора після збурювальної дії від повороту приладу. При цьому в каналі широти осі фотоприймальної матриці мають поворот на гострий кут навколо горизонтальної осі в площини мішені матриці. 4. В заданий час t3 (при з'явленні зірки в полях зору каналів) блок 11 включає електронні блоки приладу (2.1, 2.2, 10.1, 10.2, 12, 13). 5. Проходження зображення робочої зірки в каналах широти та довготи в першому прийомі. При цьому в каналі довготи в автоматичному режимі фіксують при переміщенні зображення зірки по мішені фотоприймальної матриці каналу моменти переходу зображення зірки через лінії розділення між пікселями матриці, що перпендикулярні напряму руху зображення зірки та по цих моментах в каналі довготи в блоці 10.1 виконують усереднення значення довготи; також одночасно за даними каналу широти в блоці 10.2 визначають траєкторію зображення зірки та приймають її апроксимоване значення за програмою, що задається блоком 13. Сигнал закінчення вимірювань подається на блок 11 через блоки 10.1, 10.2. 6. За програмою блока 13, що контролюється за часом високочастотним таймером 12, на блок 7 подається команда на поворот алідади 14 приладу на 180° за азимутом та блок 7 виконує заданий поворот. Кут повороту 180° контролюється датчиком 15. Сигнал про закінчення повороту з датчика 15 подається в блок 11. При цьому візирні осі каналів встановлюються поблизу зеніту з відхиленнями на як раз такий саме малий кут від зеніту, що і в першому прийомі, але в протилежному напрямку відповідно в площині меридіана та першого вертикала. 7. За час між закінченням першого прийому вимірювань та початком другого відбувається заспокоєння чутливого елемента компенсатора та його стабілізація відносно горизонту. 8. За програмою блока 13 блок 11 подає команду в електронні блоки 2.1, 2.2, 10.1, 10.2, 12, 13 на включення режиму очікування другого прийому. 9. Зображення зірки з'являється в полях зору каналів широти та довготи, відповідно до заданої блоком 13 програми виконуються виміри в каналах широти та довготи аналогічно вимірюванням в першому прийомі з обробкою даних в блоках 10.1 та 10.2. В блок 11 з блоків 10.1 та 10.2 надходить сигнал про закінчення другого прийому вимірювань. 10. Обчислення координат. Блок 11 дає команду блокам 10.1 та 10.2 на визначення координат по заданій програмі. В блоці 10.1 виконується за даними каналу довготи оцінка середніх значень в двох каналах положення проходження зображенням зірки ліній розділення пікселів матриці з застосуванням субпіксельного вимірювання інтервалу між лініями та визначається астрономічна довгота пункту 3 як середнє з двох прийомів. 2 UA 104178 C2 5 10 15 Одночасно в блоці 10.2 за даними каналу широти визначають відстань між двома виміряними траєкторіями зображення зірки на мішені матриці та розраховують по середній траєкторії значення астрономічної широти пункту 3 за програмою, що задається блоком 13. 11. Отримані астрономічні координати та виміряні за допомогою GPS геодезичні координати перетворюють в значення відхилення прямовисної лінії для даного пункту. Ці дані передають з блока 3 до блока індикації 12 та записують на носій. Таким чином, запропонований спосіб, за рахунок поканального розділення вимірювань за широтою та довготою, застосування в оптичних системах каналів високоточних оптикомеханічних компенсаторів та оптимального розподілення часу на вимірювання та заспокоєння маятника компенсатора дозволяє підвищити точність визначення прямовисних ліній та виконати астрономічні виміри в автоматичному режимі. 1. Закатов П.С. Курс высшей геодезии/ П.С. Закатов. 4-е изд. перераб. и доп. - М.: Недра, 1976.-511с. С.279-290. 2. Боровий В.О., Зенітна фотокамера для визначення нахилу прямовисних ліній/ В.О.Боровий, В.Г. Бурачек, Р.Х. Греку// Інж. геод. – 1991.- Вип.34. – С.8-12. ФОРМУЛА ВИНАХОДУ 20 25 Спосіб визначення положення прямовисних ліній, заснований на вимірюванні координат зірок поблизу зеніту двома прийомами з поворотом оптичної труби навколо вертикальної осі на 180° та з наступним обчислюванням астрономічних координат пункту та відхилення вискової лінії, використовуючи геодезичні координати пункту, який відрізняється тим, що в кожному прийомі виконують вимірювання в двох каналах цифрової камери: широти та довготи, зі збільшенням інтервалу часу між прийомами визначення координат за рахунок орієнтації лінії візування в каналах; в каналі широти лінію візування орієнтують в площині першого вертикала та під гострим кутом до площини меридіана, а в каналі довготи - до площини меридіана та під гострим кутом до площини першого вертикала. 3 UA 104178 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюBurachek Vsevolod Hermanovych
Автори російськоюБурачек Всеволод Германович
МПК / Мітки
МПК: G01C 5/00
Мітки: визначення, прямовисних, ліній, відхилень, спосіб
Код посилання
<a href="https://ua.patents.su/6-104178-sposib-viznachennya-vidkhilen-pryamovisnikh-linijj.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення відхилень прямовисних ліній</a>
Спосіб визначення відхилень від прямолінійності осі корпусу обертової печі
Номер патенту: 87217
Опубліковано: 25.06.2009
Автори: Красюк Олексій Павлович, Марченков Олександр Іванович, Шевченко Тарас Георгійович, Кузьо Ігор Володимирович, Мороз Олександр Іванович
МПК: F27B 7/00
Мітки: визначення, спосіб, печі, корпусу, осі, відхилень, прямолінійності, обертової
Формула / Реферат:
Спосіб визначення відхилень від прямолінійності осі корпусу обертової печі, який полягає у тому, що знаходять центри поперечних перетинів корпусу і вимірюють їхнє розташування відносно прямої лінії, яка проходить через центри двох поперечних перетинів, який відрізняється тим, що поблизу центра одного з поперечних перетинів корпусу встановлюють електронний тахеометр, вимірюють віддалі до площин двох інших поперечних перетинів, у яких поблизу...
Спосіб визначення первинних параметрів кабельних та рейкових ліній рейкових кіл при центральному розміщенні апаратури
Номер патенту: 61018
Опубліковано: 11.07.2011
Автори: Романцев Іван Олегович, Гаврилюк Володимир Ілліч
МПК: B61L 25/06
Мітки: ліній, параметрів, розміщенні, апаратури, рейкових, визначення, спосіб, кіл, первинних, кабельних, центральному
Формула / Реферат:
Спосіб визначення первинних параметрів кабельних та рейкових ліній рейкових кіл при центральному розміщенні апаратури, при якому визначають робочий сигнальний струм та напругу на релейних та живильних кінцях, фазовий зсув між ними, вторинні та первинні параметри ліній, який відрізняється тим, що проводять запис вказаних електричних величин при проходженні рухомого складу, далі визначають первинні параметри кабельних ліній, після чого...
Спосіб визначення відхилень від прямолінійності осі обертання обертової печі
Номер патенту: 88124
Опубліковано: 10.09.2009
Автори: Мороз Олександр Іванович, Кузьо Ігор Володимирович, Шевченко Тарас Георгієвич, Кубрак Олена Дмитрівна, Шевченко Георгій Тарасович
МПК: F27B 7/22
Мітки: відхилень, осі, спосіб, прямолінійності, печі, визначення, обертової, обертання
Формула / Реферат:
Спосіб визначення відхилень від прямолінійності осі обертання обертової печі, який полягає у тому, що вимірюють діаметри бандажів, опорних роликів і віддалі між осями опорних роликів, закріплюють на опорах печі з двох її боків створи, вимірюють на кожній опорі віддалі від одного із створів до осі одного з пари опорних роликів, порівнюють їх з розрахунковими і визначають відхилення від прямолінійності осі обертання печі в плані, який...
Спосіб визначення довжин ліній еталонного геодезичного базису
Номер патенту: 83876
Опубліковано: 10.10.2013
Автори: Цюпак Ігор Михайлович, Шевченко Тарас Георгійович, Тревого Ігор Севірович, Шевченко Георгій Тарасович, Ванчура Олена Іванівна
МПК: G01C 3/00
Мітки: еталонного, ліній, довжин, спосіб, базису, визначення, геодезичного
Формула / Реферат:
Спосіб визначення довжин ліній еталонного геодезичного базису, що включає встановлення і примусове центрування приладів для вимірювання віддалей на початковому та решті пунктів базису і визначення віддалей між ними, який відрізняється тим, що як прилади для вимірювання віддалей використовують GPS-приймачі, виконують необхідні сесії вимірювань, визначають координати пунктів базису, а за ними віддалі між пунктами.
Пристрій для визначення місць пошкоджень кабельних ліній
Номер патенту: 31931
Опубліковано: 15.03.2002
Автор: Назаров Володимир Васильович
МПК: G01R 31/08
Мітки: кабельних, місць, визначення, пристрій, пошкоджень, ліній
Формула / Реферат:
Пристрій для визначення місць пошкоджень кабельних ліній, що включає блок живлення та імпульсний конденсатор, який відрізняється тим, що імпульсний конденсатор та пошкоджена кабельна лінія з’єднані через електронний (наприклад, тиристорний) комутатор, а до спільної точки високовольтних виводів блока живлення, імпульсного конденсатора та електронного комутатора під'єднано введений управляючий пороговий блок, низьковольтний вихід якого...
Попередній патент: Спосіб отримання ефірної олії хмелю
Наступний патент: Пристрій для визначення відхилень прямовисних ліній
Випадковий патент: Спосіб пакування і термообробки харчового продукту в пакувальному контейнері