Система автоматичного раціонального керування
Номер патенту: 116162
Опубліковано: 12.02.2018

Формула / Реферат
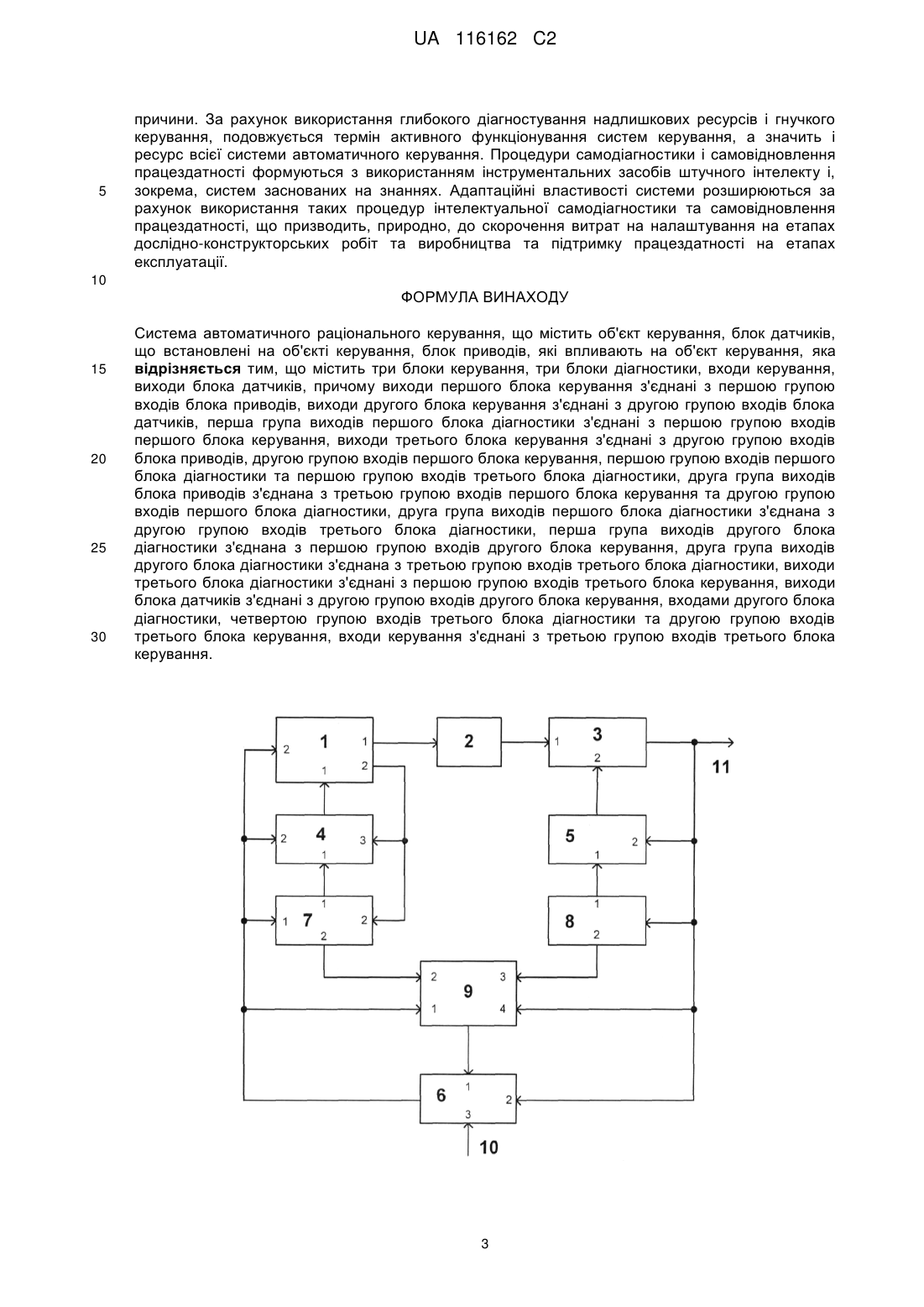
Система автоматичного раціонального керування, що містить об'єкт керування, блок датчиків, що встановлені на об'єкті керування, блок приводів, які впливають на об'єкт керування, яка відрізняється тим, що містить три блоки керування, три блоки діагностики, входи керування, виходи блока датчиків, причому виходи першого блока керування з'єднані з першою групою входів блока приводів, виходи другого блока керування з'єднані з другою групою входів блока датчиків, перша група виходів першого блока діагностики з'єднані з першою групою входів першого блока керування, виходи третього блока керування з'єднані з другою групою входів блока приводів, другою групою входів першого блока керування, першою групою входів першого блока діагностики та першою групою входів третього блока діагностики, друга група виходів блока приводів з'єднана з третьою групою входів першого блока керування та другою групою входів першого блока діагностики, друга група виходів першого блока діагностики з'єднана з другою групою входів третього блока діагностики, перша група виходів другого блока діагностики з'єднана з першою групою входів другого блока керування, друга група виходів другого блока діагностики з'єднана з третьою групою входів третього блока діагностики, виходи третього блока діагностики з'єднані з першою групою входів третього блока керування, виходи блока датчиків з'єднані з другою групою входів другого блока керування, входами другого блока діагностики, четвертою групою входів третього блока діагностики та другою групою входів третього блока керування, входи керування з'єднані з третьою групою входів третього блока керування.
Текст
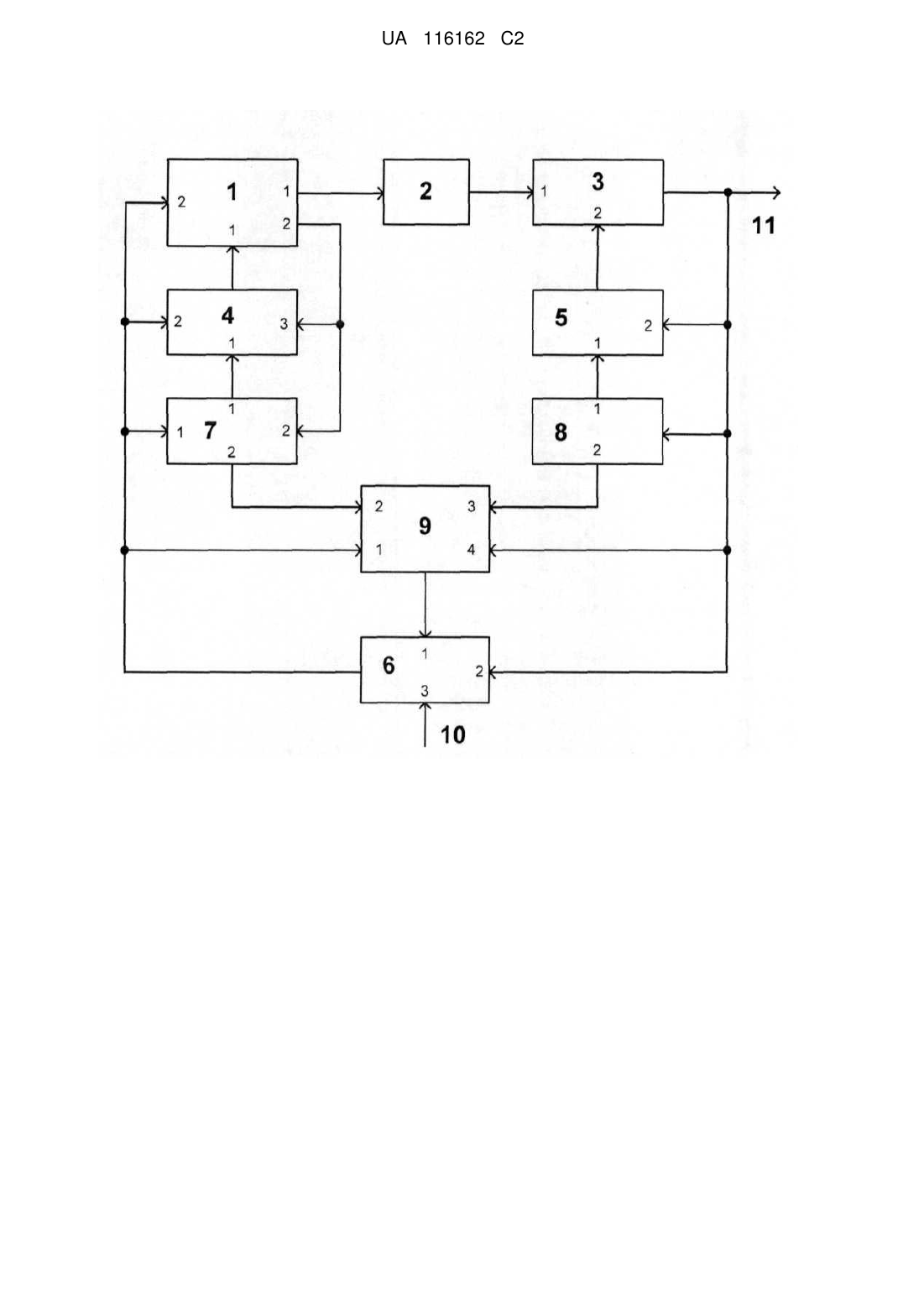
Реферат: Система автоматичного раціонального керування належить до систем керування літальними апаратами й може бути використана в авіаційній і ракетній техніці. Система автоматичного раціонального керування містить об'єкт керування, блок датчиків, що встановлені на об'єкті керування, блок приводів, які впливають на об'єкт керування, три блоки керування, три блоки діагностики, входи керування, виходи блока датчиків. За допомогою запропонованої системи досягається розширення функціональних можливостей. UA 116162 C2 (12) UA 116162 C2 UA 116162 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до систем керування літальними апаратами й може бути використаний в авіаційній і ракетній техніці. Відома система керування літальним апаратом (патент Російської федерації № 2003109217, МПК G 05 D 1/10, дата подачі заявки 2003.04.02, дата публікації заявки 2004.10.27), що містить формувачі каналів тангажу, курсу й крену, датчики кутових швидкостей у відповідних каналах, задатчики граничних параметрів, функціональні перетворювачі. Недоліком відомої системи є низькі функціональні можливості. Відома система керування літальним апаратом (патент Російської федерації № 2234725, МПК G 05 D 1/10, дата подачі заявки 2003.04.02, дата публікації заявки 2004.08.20), яка містить формувачі каналів тангажу, курсу й крену, датчики кутових швидкостей, блок кінематичного розведення. Недоліком відомої системи є низькі функціональні можливості. Найбільш близька по технічній суті й результату, що досягається є "Відмовостійка система керування літальним апаратом" (Пат. України № 36472, МПК G05D 1/10, опубл. 27.10.2008, бюл. № 20, 2008р.), що містить об'єкт керування, блок датчиків, що встановлені на об'єкті керування, блок приводів, які впливають на об'єкт керування. Недоліком відомої системи є низькі функціональні можливості. В основу винаходу поставлено задачу удосконалення системи автоматичного раціонального керування шляхом уведення нового складу елементів, та нової організації взаємозв'язків між ними, забезпечити вищі функціональні можливості. Поставлена задача вирішується тим, що система автоматичного раціонального керування, що містить об'єкт керування, блок датчиків, що встановлені на об'єкті керування, блок приводів, які впливають на об'єкт керування, згідно з винаходом, містить три блоки керування, три блоки діагностики, входи керування, виходи блока датчиків, причому виходи першого блока керування з'єднані з першою групою входів блока приводів, виходи другого блока керування з'єднані з другою групою входів блока датчиків, перша група виходів першого блока діагностики з'єднані з першою групою входів першого блока керування, виходи третього блока керування з'єднані з другою групою входів блока приводів, другою групою входів першого блока керування, першою групою входів першого блока діагностики та першою групою входів третього блока діагностики, друга група виходів блока приводів з'єднана з третьою групою входів першого блока керування та другою групою входів першого блока діагностики, друга група виходів першого блока діагностики з'єднана з другою групою входів третього блока діагностики, перша група виходів другого блока діагностики з'єднана з першою групою входів другого блока керування, друга група виходів другого блока діагностики з'єднана з третьою групою входів третього блока діагностики, виходи третього блока діагностики з'єднані з першою групою входів третього блока керування, виходи блока датчиків з'єднані з другою групою входів другого блока керування, входами другого блока діагностики, четвертою групою входів третього блока діагностики та другою групою входів третього блока керування, входи керування з'єднані з третьою групою входів третього блока керування. Заявлена система має новий склад елементів, та нову організацію взаємозв'язків між ними, тобто містить нову сукупність ознак, які забезпечують нові технічні властивості винаходу. Технічний результат, як наслідок цих властивостей - підвищені функціональні можливості, а саме - підвищення якості керування, стійкості до дестабілізуючих впливів, безпеці й надійності функціонування, строку активного функціонування, ресурсу системи керування, інтелектуальності, адаптаційних властивостей, скорочення експлуатаційних витрат. На фіг. 1 представлена функціональна схема системи автоматичного раціонального керування, що містить об'єкт керування 2, блок датчиків 3, що встановлені на об'єкті керування, блок приводів 1, які впливають на об'єкт керування, три блока керування 4, 5, 6, три блока діагностики 7, 8, 9, входи керування 10, виходи блока датчиків 11, причому виходи першого блока керування 4 з'єднані з першою групою входів блока приводів 1, виходи другого блока керування 5 з'єднані з другою групою входів блока датчиків 3, перша група виходів першого блока діагностики 7 з'єднані з першою групою входів першого блока керування 4, виходи третього блока керування 6 з'єднані з другою групою входів блока приводів 1, другою групою входів першого блока керування 4, першою групою входів першого блока діагностики 7 та першою групою входів третього блока діагностики 9, друга група виходів блока приводів 1 з'єднана з третьою групою входів першого блока керування 4 та другою групою входів першого блока діагностики 7, друга група виходів першого блока діагностики 7 з'єднана з другою групою входів третього блока діагностики 9, перша група виходів другого блока діагностики 8 з'єднана з першою групою входів другого блока керування 5, друга група виходів другого блока діагностики 8 з'єднана з третьою групою входів третього блока діагностики 9, виходи третього блока 1 UA 116162 C2 5 10 15 20 25 30 35 40 45 50 55 60 діагностики 9 з'єднані з першою групою входів третього блока керування 6, виходи блока датчиків 11 з'єднані з другою групою входів другого блока керування 5, входами другого блока діагностики 8, четвертою групою входів третього блока діагностики 9 та другою групою входів третього блока керування 6, входи керування 10 з'єднані з третьою групою входів третього блока керування 6. Працює система таким чином. Блок приводів 1, об'єкт керування 2 і блок датчиків 3 у сукупності являють об'єкт раціонального керування, блоки якого схильні до впливу дестабілізуючих дій, які складаються з шумів, збурень і відмов. Дестабілізуючі дії призводять до порушення працездатності блоків 1, 2 і 3 та в цілому системи автоматичного раціонального керування. Для нейтралізації дестабілізуючих впливів використовується принцип керування за діагностикою. Для реалізації цього принципу використовуються блоки діагностики 4, 5 і 9, в яких виявляється причина дестабілізації в блоках 1, 3 і 2, а також блоки керування 7, 8 і 6, в яких формуються управляючі дії для відновлення працездатності відповідно 1 блоків 1, 3 і 2. Розглянемо особливості функціонування підсистеми щодо раціонального керування працездатністю блока приводів 1. Отже, на першу групу входів блока 1 надходять сигнали керування з блока керування 6, а з першої групи виходів - на об'єкт керування 2. На блок приводів 1 діють дестабілізуючі впливи, що порушують його працездатність. Виявлення причини порушення працездатності проводиться в блоці діагностики 7, на першу групу входів якого надходять сигнали керування з блока керування 6, а на другу групу входів сигнали з другої групи виходів блока приводів 1. В результаті обробки цих сигналів формується результат діагностики про причини порушення працездатності, який з першої групи виходів надходить на першу групу входів блока керування 4. У блоці керування 4 на підставі інформації з другої і третьої груп входів виробляються керуючі впливи з відновлення працездатності, що надходять на першу групу входів блока приводів 1. Інформація про результат діагностики надходить також з другої групи виходів блока діагностики 7 на першу групу входів блока діагностики 9. Отже, підсистема приводів, що включає блоки 1, 4 і 7 та відповідні схеми зв'язку, дають змогу реалізувати принцип керування за результатом діагностики, що дозволяє відновлення працездатності блока приводів 1 при появі дестабілізуючого впливу з безлічі можливих, яким піддається блок приводів 1. Підсистема раціонального керування працездатністю блока датчиків З включає також блок діагностики 8 і блок керування 5. На першу групу входів блока датчиків 3 надходить сигнал з об'єкту керування 2. Результати вимірювань надходять на другу групу входів блока керування 5 і на третю групу входів блока діагностики 8. Блок датчиків 3 схильний до впливу дестабілізуючих дій, які порушують його працездатність. Причини порушення працездатності виявляються в блоці діагностики 8 і виявлений результат надходить на першу групу входів блока керування 5. У блоці керування 5 формується вплив по відновленню працездатності, що надходить на другу групу входів 2 блока датчиків 3, де і проводиться відновлення працездатності до необхідного рівня. З другої групи виходів блока діагностики 8 надходить сигнал на третю групу входів блока діагностики 9. У блоці діагностики 9 по сигналах з виходу блока 6, що надходять на першу групу входів, сигналів з виходу блока3, що надходять на другу групу входів блока 6 та сигналів з блоків діагностики 7 і 8 проводиться діагностування об'єкта керування 2 і всієї підсистеми об'єкта раціонального керування, що включає блок приводів 1, об'єкт керування 2 і блок датчиків 3. Результати діагностики надходять на першу групу входів блока керування 6, в якому на підставі результатів діагностики, сигналів другої групи входів та сигналів, задавального впливу 10, що надходять на третю групу входів блока керування 1. Цей сигнал забезпечує працездатність всієї системи раціонального керування відповідно до задавального впливу 10. Функціональні можливості представленої системи автоматичного раціонального керування розширюються завдяки використанню принципу керування по результатах діагностики, що дозволяє виявляти конкретні причини порушення працездатності об'єкта автоматичного керування, викликані шумами, збуреннями і відмовами. Після виявлення причин порушення працездатності - отримання результатів діагностики, проводиться гнучке парирування конкретної причини відповідними надмірними засобами з множини можливих: підстроювань (сигнального або параметричного), реконфігурації (алгоритмів або апаратури). Запропоноване використання нових блоків діагностики та керування і нових зв'язків дозволяє підвищити якість керування за рахунок більш точної ідентифікації причин дестабілізації і ефективного їх парирування, що забезпечує більшу стійкість об'єктів автоматичного керування до реальної множини дестабілізуючих впливів. Нова система дозволяє підвищити рівень безпеки і надійності функціонування, так як автоматично виявляються будь-які відхилення в працездатності і автоматично парируються 2 UA 116162 C2 5 причини. За рахунок використання глибокого діагностування надлишкових ресурсів і гнучкого керування, подовжується термін активного функціонування систем керування, а значить і ресурс всієї системи автоматичного керування. Процедури самодіагностики і самовідновлення працездатності формуються з використанням інструментальних засобів штучного інтелекту і, зокрема, систем заснованих на знаннях. Адаптаційні властивості системи розширюються за рахунок використання таких процедур інтелектуальної самодіагностики та самовідновлення працездатності, що призводить, природно, до скорочення витрат на налаштування на етапах дослідно-конструкторських робіт та виробництва та підтримку працездатності на етапах експлуатації. 10 ФОРМУЛА ВИНАХОДУ 15 20 25 30 Система автоматичного раціонального керування, що містить об'єкт керування, блок датчиків, що встановлені на об'єкті керування, блок приводів, які впливають на об'єкт керування, яка відрізняється тим, що містить три блоки керування, три блоки діагностики, входи керування, виходи блока датчиків, причому виходи першого блока керування з'єднані з першою групою входів блока приводів, виходи другого блока керування з'єднані з другою групою входів блока датчиків, перша група виходів першого блока діагностики з'єднані з першою групою входів першого блока керування, виходи третього блока керування з'єднані з другою групою входів блока приводів, другою групою входів першого блока керування, першою групою входів першого блока діагностики та першою групою входів третього блока діагностики, друга група виходів блока приводів з'єднана з третьою групою входів першого блока керування та другою групою входів першого блока діагностики, друга група виходів першого блока діагностики з'єднана з другою групою входів третього блока діагностики, перша група виходів другого блока діагностики з'єднана з першою групою входів другого блока керування, друга група виходів другого блока діагностики з'єднана з третьою групою входів третього блока діагностики, виходи третього блока діагностики з'єднані з першою групою входів третього блока керування, виходи блока датчиків з'єднані з другою групою входів другого блока керування, входами другого блока діагностики, четвертою групою входів третього блока діагностики та другою групою входів третього блока керування, входи керування з'єднані з третьою групою входів третього блока керування. 3 UA 116162 C2 Комп’ютерна верстка Л. Бурлак Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 1/10, G05B 13/02
Мітки: раціонального, керування, автоматичного, система
Код посилання
<a href="https://ua.patents.su/6-116162-sistema-avtomatichnogo-racionalnogo-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного раціонального керування</a>
Система формування ієрархічного діагностичного забезпечення систем управління космічних апаратів

Номер патенту: 67038
Опубліковано: 25.01.2012
Автор: Кулік Анатолій Степанович
МПК: B64G 1/28
Мітки: систем, апаратів, управління, ієрархічного, діагностичного, забезпечення, формування, система, космічних
Формула / Реферат:
Система формування ієрархічного діагностичного забезпечення систем управління космічних апаратів, що містить блок приводів, блок датчиків, блок обчислювачів, причому виходи блока датчиків з'єднані з входами блока обчислювачів, виходи якого з'єднані з входами блока приводів, яка відрізняється тим, що містить блок діагностування системи, чотири блоки діагностичного забезпечення, блок діагностування місії, п'ять виходів діагностичної...
Система керування багатофакторним експериментом
Номер патенту: 121114
Опубліковано: 27.11.2017
Автори: Костенко Олена Михайлівна, Дергачов Володимир Андрійович, Кошовий Микола Дмитрович, Кошова Ірина Іванівна, Павлик Ганна Володимирівна
МПК: G06F 17/00
Мітки: керування, багатофакторним, експериментом, система
Формула / Реферат:
Система керування багатофакторним експериментом, що містить керуючий вхід, входи номера варіанта, блок пам'яті, виходи значень рівнів факторів, інформаційний вихід, блок керування, формувач результату досліду, виходи коду часу зміни рівнів, виходи коду часу проведення досліду, керуючий вихід, формувач часових інтервалів, причому виходи блока пам'яті з'єднані з виходами значень рівнів факторів, перша група виходів блока керування з'єднана з...
Автоматизована система проведення багатофакторного експерименту
Номер патенту: 119811
Опубліковано: 10.10.2017
Автори: Костенко Олена Михайлівна, Дергачов Володимир Андрійович, Павлик Ганна Володимирівна, Кошова Ірина Іванівна, Кошовий Микола Дмитрович
МПК: G06F 17/00
Мітки: система, багатофакторного, автоматизована, проведення, експерименту
Формула / Реферат:
Автоматизована система проведення багатофакторного експерименту, що містить суматор, перший блок пам'яті, блок допускового контролю, керуючий вхід, виходи значень рівнів факторів, входи номера варіанта, блок керування, першу групу інформаційних виходів, перетворювач, блок датчиків, причому входи номера варіанта з'єднані з першою групою входів суматора, виходи якого з'єднані з входами першого блока пам'яті, виходи першого блока пам'яті...
Система для проведення багатофакторного експерименту
Номер патенту: 102795
Опубліковано: 25.11.2015
Автори: Савельєв Анатолій Семенович, Дергачов Володимир Андрійович
МПК: G06F 17/00
Мітки: багатофакторного, проведення, експерименту, система
Формула / Реферат:
Система для проведення багатофакторного експерименту, що містить суматор, перший блок пам'яті, блок допускового контролю, керуючий вхід, виходи значень рівнів факторів, входи номеру варіанта, блок керування, інформаційні виходи, перетворювач, блок датчиків, другий блок пам'яті, причому керуючий вхід з'єднаний з першим входом блока керування, перша група виходів блока керування з'єднана з другою групою входів суматора, друга група виходів...
Система відмовостійкого керування об`єктами
Номер патенту: 17838
Опубліковано: 16.10.2006
Автори: Циганкова Ольга Анатоліївна, Тетеревятніков Дмитро Володимирович, Мирна Олена Володимирівна, Гавриленко Олег Іванович
МПК: G06F 11/18
Мітки: відмовостійкого, об'єктами, керування, система
Формула / Реферат:
Система відмовостійкого керування об'єктами, яка має входи системи, виходи системи, об'єкт діагностування, входи системи з'єднані з інформаційними входами об'єкта діагностування, виходи об'єкта діагностування з'єднані з виходами системи, що містить аналізатор виду аварійної ситуації, формувач варіантів парирування, блок вибору процедури парирування, інформаційну шину, причому входи системи з'єднані з першою групою входів аналізатора виду...
Попередній патент: Спосіб термосифонного охолодження
Наступний патент: Касета для встановлювання металевих закладних у прес-форму
Випадковий патент: Спосіб оцінки збалансованості вегетативного забезпечення хворих на гіпотеріоз