Багатопозиційний пневмоелектричний привод
Номер патенту: 117163
Опубліковано: 26.06.2017
Автори: Дідовець Вячеслав Євгенович, Древаль Віталій Васильович, Новік Микола Андрійович

Формула / Реферат
1. Багатопозиційний пневмоелектричний привод, що містить виконавчий циліндр з можливістю поступального руху в одному із циліндрів гідравлічного об'ємного дозатора, які виконані у вигляді циліндрів з розміщеними в них розрядними поршнями, що утворюють розрядні пневматичні та гідравлічні порожнини, сполучені з гідравлічною порожниною виконавчого циліндра, який відрізняється тим, що у виконавчому циліндрі між задньою кришкою і поршнем з вихідним штоком розміщений додатковий розрядний поршень з пустотілим хвостовиком, який концентрично розміщений в глухій циліндричній розточці вихідного штока з поршнем, на торцях хвостовика і поршня розміщені кільцеві упори.
2. Багатопозиційний пневмоелектричний привод за п. 1, який відрізняється тим, що тиск живлення до додаткової пневматичної розрядної порожнини підводять через осьовий канал хвостовика задньої кришки.
Текст
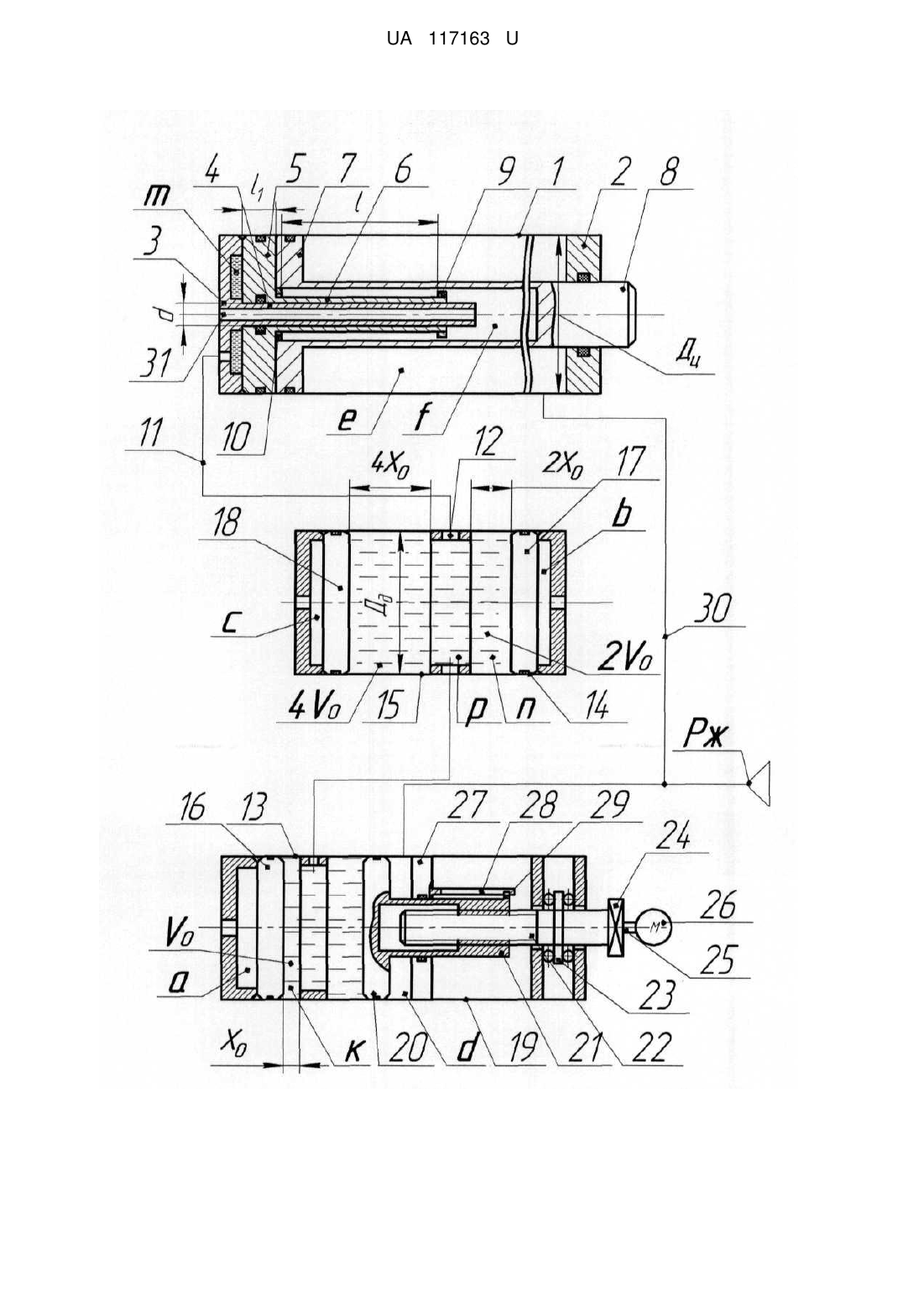
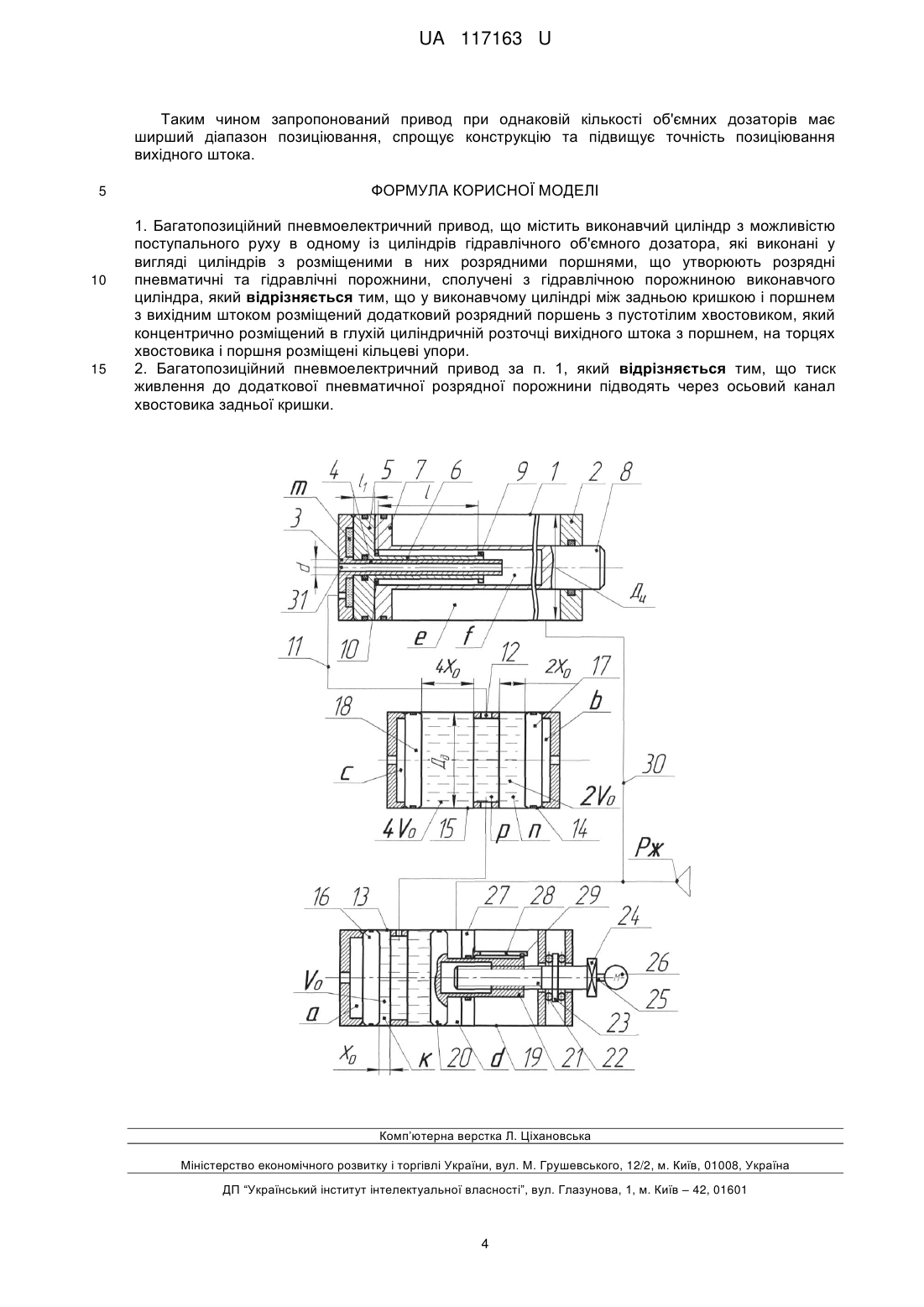
Реферат: Багатопозиційний пневмоелектричний привод містить виконавчий циліндр з можливістю поступального руху в одному із циліндрів гідравлічного об'ємного дозатора, які виконані у вигляді циліндрів з розміщеними в них розрядними поршнями. Поршні утворюють розрядні пневматичні та гідравлічні порожнини, сполучені з гідравлічною порожниною виконавчого циліндра. У виконавчому циліндрі між задньою кришкою і поршнем з вихідним штоком розміщений додатковий розрядний поршень з пустотілим хвостовиком. Хвостовик концентрично розміщений в глухій циліндричній розточці вихідного штока з поршнем, на торцях хвостовика і поршня розміщені кільцеві упори. UA 117163 U (54) БАГАТОПОЗИЦІЙНИЙ ПНЕВМОЕЛЕКТРИЧНИЙ ПРИВОД UA 117163 U UA 117163 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до пристроїв автоматики і може бути використана як привід метало та деревообробних верстатів, промислових роботів в складальному та зварювальному виробництві, для позиціонування заслінок нафтових та газових трубопроводів, в станціях наведення ракетних установок та в інших механізмах з дискретним позиціонуванням вихідної ланки. Відомим аналогом є патент України на корисну модель №97234, "Багатопозиційний комбінований привод" МПК F15B 11/02, опублікований 10.03.2015р, що містить циліндр з передньою і задньою кришками, в якому з утворенням штокової та сполучної з гідравлічними порожнинами дозаторів міжпоршневої і компенсаційної порожнини, розміщені в циліндрі поршень з вихідним штоком, який кінематично сполучений з вихідним валом електричного крокового двигуна, додаткового та проміжного поршня. Недоліком аналога є те, що послідовне розміщення у виконавчому циліндрі поршня з вихідним штоком, проміжного поршня, додаткового поршня з хвостовиком, з яким кінематично через гвинтову пару з'єднаний вихідний вал електричного крокового двигуна, обумовлює складність конструкції і значний осьовий габаритний розмір. Складність конструкції обумовлюється також і розміщенням компенсаційної камери у виконавчому циліндрі. Крім цього неможливо одночасно подавати сигнали керування на електричний кроковий двигун та на об'єднані гідравлічні дозатори, а також подавати тиск живлення в пневматичну додаткову камеру. Недоліком також є те, що необхідно подавати тиск живлення в пневматичну додаткову камеру і тільки після переміщення вихідного штока на величину l, подають керуючі сигнали на об'ємні дозатори і на кроковий двигун, що значно ускладнює систему курування і обмежує область застосування. Найближчим аналогом до корисної моделі є патент України на корисну модель №73494, " Багатопозиційний пневмоелектричний привод" МПК F15B 11/02, опублікований 25.09.2012 р., що містить циліндр, в якому розміщений поршень з вихідним штоком, гідравлічні об'ємні дозатори та електричний кроковий двигун, вихідний вал якого кінематично сполучений з додатковим поршнем зі штоком, та розміщений в одному з циліндрів гідравлічних дозаторів з утворенням гідравлічної і компенсуючої порожнин. Недоліком найближчого аналога є те, що величина переміщення вихідного штока визначається тільки опрацюванням керуючих сигналів, які подаються на гідравлічні об'ємні дозатори та на електричний кроковий двигун. Збільшення кількості об'ємних гідравлічних дозаторів призводить до ускладнення конструкції приводу і збільшення втрат рідини в рухомих з'єднаннях дозаторів, що в свою чергу знижує точність позиціювання вихідного штока, в результаті чого обмежується область застосування таких приводів. В основу корисної моделі поставлена задача розширення діапазону позиціювання багатопозиційного пневмоелектричного приводу та підвищення точності позиціонування вихідного штока за рахунок встановлення в циліндр додаткового розрядного поршня. Поставлена задача вирішується тим, що в багатопозиційному пневмоелектричному приводі, що містить виконавчий циліндр з можливістю поступального руху в одному із циліндрів гідравлічного об'ємного дозатора, які виконані у вигляді циліндрів з розміщеними в них розрядними поршнями, що утворюють розрядні пневматичні та гідравлічні порожнини, сполучені з гідравлічною порожниною виконавчого циліндра, згідно з корисною моделлю, у виконавчому циліндрі між задньою кришкою і поршнем з вихідним штоком розміщений додатковий розрядний поршень з пустотілим хвостовиком, який концентрично розміщений в глухій циліндричній розточці вихідного штока з поршнем, на торцях хвостовика і поршня розміщені кільцеві упори. Згідно з корисною моделлю, тиск живлення до додаткової пневматичної розрядної порожнини підводять через осьовий канал хвостовика задньої кришки. В результаті цього досягається розширення діапазону позиціювання вихідного штока, спрощення конструкції і підвищення точності позиціювання, що обумовлює розширення області застосування таких приводів. Суть корисної моделі пояснюється кресленням, де представлена схема багатопозиційного пневмоелектричного приводу. Багатопозиційний пневмоелектричний привод складається з виконавчого циліндра 1, до якого прикріплена передня кришка2 і задня кришка 3 з хвостовиком 4. Між передньою кришкою 2 і задньою кришкою 3 розміщений додатковий розрядний поршень 5 з хвостовиком 6 і поршень 7 з вихідним штоком 8. На поршні 7 і хвостовику 6 закріплені відповідно кільцеві упори 9 і 10, які обмежують переміщення вихідного штока 8 відносно додаткового розрядного поршень 5. Між задньою кришкою 3 і додатковим розрядним поршнем 5 розміщена камера "m" з вихідним каналом 12, які сполучені каналом 11 гідравлічних об'ємних дозаторів 13, 14 і 15, в яких розміщені відповідно розрядні поршні 16 і 17,18 з величинами переміщення х 0, 2х0 і 4х0. 1 UA 117163 U 5 Розрядні поршні 16,17 і 18 утворюють гідравлічні камери "k", "n", "р" з об'ємами рідини відповідно V0, 2V0 і 4V0 і розрядні пневматичні камери "а", "в" і "с". В циліндрі 19 розміщений поршень 20 зі штоком 21, в який встановлений гвинт 22, встановлений на підшипнику 23 і муфтою 24, з'єднаний з вихідним валом 25 електричного крокового двигуна 26. В циліндрі 19 встановлена кришка 27, зі шпоночним пазом 28, в якому розміщена шпонка 29, закріплена на штоці 21. Поршень 20 і кришка 27 утворюють компенсаційну камеру "d", яка сполучена з камерою "є" виконавчого циліндра 1, каналом 30 та джерелом живлення "Р ж", між додатковим розрядним поршнем 5 і поршнем 7 розташована камера "f ", до якої підводиться тиск живлення 31. Відстань між кільцевими упорами 9 і 10 визначається по залежності: 10 x0 15 Дг Дг ц d 2n , 2 де Х0 - переміщення поршня розрядного 16 гідравлічного дозатора 13; Дд і Дц - відповідно діаметр поршнів гідравлічного об'ємного дозатора 13, 15 і виконавчого циліндра 1; d - діаметр хвостовика 6. Довжина X хвостовика 4 визначається по залежності: хв. 1 2 1 x 0 20 25 30 40 Дг ц d 2 1 360 n n 2 max t , (1) де - максимальна довжина 1 - довжина додаткового розрядного поршня 5; 2 переміщення додаткового розрядного поршня 5; nmax - максимальне число опрацьованих імпульсів електричним кроковим двигуном 26. Принцип роботи багатопозиційного пневмоелектричного приводу полягає в наступному. У вихідному положенні електричний кроковий двигун 26 знеструмлений, до камери "є" і до компенсаційної камери "d" підведено по каналу 30 тиск живлення "Р ж", а камери "а","в", "с" і "f " сполучені з атмосферою. Під дією тиску в камері "e" поршень 7 додаткового розрядного поршня 5 виконавчого циліндра 1 і розрядні поршні 16,17,18 гідравлічних об'ємних дозаторів 13,14,15 займають вихідне положення, що відповідає кодовій комбінації керуючих сигналів 0000. При опрацюванні, наприклад кодової комбінації керуючих сигналів 0001 (тиск живлення підводиться до камери дозатора 13), розрядний поршень 18 переміщується праворуч на величину Х0 і витісняє рідину об'ємом V0 і з камери "κ" в камеру "m" виконавчого циліндра 1. При цьому вихідний шток 8 переміщується вправо на величину: 0 35 Дг 4 0 2 Дц d2 Д2 Д 2 ДЦ d 2 х0 , (2) де Х0 - переміщення поршня розрядного 16 гідравлічного дозатора 12; Дд і Дц - відповідно діаметр поршнів гідравлічного об'ємного дозатора 13, 15 і виконавчого циліндра 1; d - діаметр хвостовика 6. 4V0 - об'єм рідини гідравлічного дозатора 14. При подачі тиску живлення в камеру "b гідравлічного дозатора 14 (що відповідає опрацюванню кодової комбінації 0010) розрядний поршень 17 переміщується ліворуч і витісняє рідину об'ємом 2V0 із камери "n" гідравлічного дозатора 14 в камеру "m", при цьому вихідний шток 8 переміщується праворуч на величину: 2 0 Д2 Д 2 ДЦ d 2 2 0 , (3) 45 де Х0 - переміщення поршня розрядного 17 гідравлічного дозатора 14; Дд і Дц - відповідно діаметр поршнів гідравлічного об'ємного дозатора 13, 15 і виконавчого циліндра 1; 2 UA 117163 U 5 d - діаметр хвостовика 6. Комбінація керуючих сигналів, наприклад 0011 (тиск одночасно подається у камеру " а" і "в" гідравлічних об'ємних дозаторів 13,14), відповідає переміщенню вихідного штока 8 на величину 3 0 і т.д. Комбінація керуючих сигналів 1111 (тиск живлення подається одночасно в камеру "а", "в" і "с",гідравлічних об'ємних дозаторів, і в камеру "F виконавчого циліндра 1) відповідає переміщенню вихідного штока № 8 на величину 15· 0 . При одночасній подачі керуючих сигналів на електричний кроковий двигун 26, подачі тиску живлення в розрядні камери "а", "в" і "с" гідравлічних об'ємних дозаторів 13,14,15 і в камеру "f" додаткового поршня 5 старшого розряду величина переміщення вихідного штока 8 визначається по залежності: 10 c Д2 Д n 1 i 1 0 2 nmin t , (4) 2 360 Д ц d2 i 1 де і - порядковий номер розрядного поршня; nmах - максимальне число опрацьованих імпульсів електричним кроковим двигуном 26. Максимальна величина переміщення вихідного штока 8 визначається по залежності: 15 max,3 20 Д2 Д 2 Дц n 1 1 nmax t , 0 2 360 d 2 де Х0 - переміщення поршня розрядного 16 гідравлічного дозатора 13; Дд і Дц - відповідно діаметр поршнів гідравлічного об'ємного дозатора 13, 15 і виконавчого циліндра 1; d - діаметр хвостовика 6. nmах - максимальне число опрацьованих імпульсів електричним кроковим двигуном 26. Число позицій вихідного штока 8 визначається по залежності Nmax,3 2n 1 nmax 25 (5) (6) nmax - максимальне число опрацьованих імпульсів електричним кроковим двигуном 26. Приймаємо наступні допущення: ДД = ДЦ, a d=0 max,3 max,в 0 2n 1 1 nmax t 2n 1 1 0 nmax t 0 2n , 360 360 30 35 40 45 де Х0- переміщення поршня розрядного 16 гідравлічного дозатора 13; Дд і Дц - відповідно діаметр поршнів гідравлічного об'ємного дозатора 13, 15 і виконавчого циліндра 1; d - діаметр хвостовика 6. nmах - максимальне число опрацьованих імпульсів електричним кроковим двигуном 26. В результаті того маємо те, що максимальна величина переміщення вихідного штока 8 приводу, що заявляється при однаковій кількості об'ємних гідравлічних дозаторів більша на n Х0·2 мм При цьому при розміщенні поршня 7 у виконавчому циліндрі 1, підвищується точність позиціювання вихідного штока 8, так як втрата повітря не впливає на величину переміщення вихідного штока 8 та досягається розширення діапазону позиціювання вихідного штока 8. Крім цього конструкція поршня 5 старшого розряду набагато простіша за конструкцію об'ємного гідравлічного дозатора такого ж розряду. Число позицій вихідного штока 8 приводу, що заявляється, в два рази більше, тобто max,3 в 2n 1 n max 2n nmax 2. 3 UA 117163 U Таким чином запропонований привод при однаковій кількості об'ємних дозаторів має ширший діапазон позиціювання, спрощує конструкцію та підвищує точність позиціювання вихідного штока. 5 10 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Багатопозиційний пневмоелектричний привод, що містить виконавчий циліндр з можливістю поступального руху в одному із циліндрів гідравлічного об'ємного дозатора, які виконані у вигляді циліндрів з розміщеними в них розрядними поршнями, що утворюють розрядні пневматичні та гідравлічні порожнини, сполучені з гідравлічною порожниною виконавчого циліндра, який відрізняється тим, що у виконавчому циліндрі між задньою кришкою і поршнем з вихідним штоком розміщений додатковий розрядний поршень з пустотілим хвостовиком, який концентрично розміщений в глухій циліндричній розточці вихідного штока з поршнем, на торцях хвостовика і поршня розміщені кільцеві упори. 2. Багатопозиційний пневмоелектричний привод за п. 1, який відрізняється тим, що тиск живлення до додаткової пневматичної розрядної порожнини підводять через осьовий канал хвостовика задньої кришки. Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F15B 11/02
Мітки: пневмоелектричний, привод, багатопозиційний
Код посилання
<a href="https://ua.patents.su/6-117163-bagatopozicijjnijj-pnevmoelektrichnijj-privod.html" target="_blank" rel="follow" title="База патентів України">Багатопозиційний пневмоелектричний привод</a>
Багатопозиційний пневмоелектричний привод
Номер патенту: 73494
Опубліковано: 25.09.2012
Автори: Дідовець Вячеслав Євгенійович, Новік Микола Андрійович
МПК: F15B 11/02
Мітки: багатопозиційний, привод, пневмоелектричний
Формула / Реферат:
Багатопозиційний пневмоелектричний привод, що містить циліндр, в якому з утворенням поршневої і штокової порожнин розміщений поршень з вихідним штоком і додатковий поршень зі штоком, кінематично сполученим з валом електричного крокового двигуна, та гідравлічні об'ємні дозатори, який відрізняється тим, що додатковий поршень зі штоком з утворенням гідравлічної та компенсуючої порожнин розміщений з можливістю поступального руху в одному із...
Багатопозиційний комбінований привод

Номер патенту: 97234
Опубліковано: 10.03.2015
Автори: Новік Микола Андрійович, Лук'янов Анатолій Михайлович, Дідовець Вячеслав Євгенійович
МПК: F15B 11/02
Мітки: привод, комбінований, багатопозиційний
Формула / Реферат:
Багатопозиційний комбінований привод, що містить циліндр з передньою і задньою кришками, в якому з утворенням штокової та сполученої з гідравлічними порожнинами дозаторів міжпоршневої порожнини і компенсаційної порожнини, розміщені в циліндрі поршень з вихідним штоком і додатковий поршень зі штоком, який через осьовий циліндричний отвір, виконаний у задній кришці, виходить за її межі і кінематично з'єднаний з вихідним валом крокового...
Багатопозиційний привод
Номер патенту: 63275
Опубліковано: 10.10.2011
Автори: Новік Микола Андрійович, Дідовець Вячеслав Євгенійович
МПК: F15B 7/00
Мітки: багатопозиційний, привод
Формула / Реферат:
Багатопозиційний привод, що містить циліндр з передньою і задньою кришками, в якому з утворенням штокової та сполученої з гідравлічними порожнинами дозаторів міжпоршневої порожнини і компенсаційної порожнини розміщені поршень з вихідним штоком і додатковий поршень зі штоком, який через осьовий циліндричний отвір, виконаний у задній кришці, виходить за її межі і кінематично з'єднаний з вихідним валом крокового двигуна, який відрізняється тим,...
Багатопозиційний пневмогідравлічний привод
Номер патенту: 27812
Опубліковано: 12.11.2007
Автор: Новік Микола Андрійович
МПК: F15B 7/00
Мітки: багатопозиційний, пневмогідравлічний, привод
Формула / Реферат:
1. Багатопозиційний пневмогідравлічний привод, що містить циліндр з розміщеними в ньому поршнем і штоком з утворенням гідравлічної поршневої та пневматичної штокової камер з каналами живлення, гідравлічні розрядні дозатори з гідравлічними і пневматичними камерами, утвореними їх поршнями, який відрізняється тим, що привод додатково містить двопозиційні дволінійні розподільники, вхідні канали яких з'єднані з гідравлічними дозаторами, а вихідні...
Багатопозиційний комбінований привод
Номер патенту: 109193
Опубліковано: 27.07.2015
Автори: Новік Микола Андрійович, Дідовець Вячеслав Євгенійович
МПК: F15B 7/06, F15B 11/02, F15B 9/02, F15B 11/12
Мітки: багатопозиційний, привод, комбінований
Формула / Реферат:
Багатопозиційний комбінований привод, що містить виконавчий циліндр, в якому з утворенням поршневої і штокової порожнин розміщений поршень з вихідним штоком, утворені розміщеними в циліндрах розрядними поршнями гідравлічні об'ємні дозатори і додатковий поршень зі штоком, кінематично сполученим з вихідним валом електричного крокового двигуна, який відрізняється тим, що вихідний канал гідравлічних об'ємних дозаторів з'єднаний з вхідним каналом...
Попередній патент: Спосіб визначення швидкості руху та кута сходу авіаційних засобів ураження з використанням цифрових засобів відеореєстрації
Наступний патент: Спосіб досягнення максимальної продуктивності в дискретному каналі зв’язку із завадостійким кодуванням
Випадковий патент: Пристрій для закупорювання скляних банок металевими кришками