Спосіб визначення швидкості руху та кута сходу авіаційних засобів ураження з використанням цифрових засобів відеореєстрації
Номер патенту: 117162
Опубліковано: 26.06.2017
Автори: Добришкін Юрій Миколайович, Стригун Віталій Васильович, Собора Анатолій Іванович, Башинський Володимир Георгійович, Царенко Дмитро Валерійович, Зозуля Валерій Миколайович, Юла Олександр Васильович

Формула / Реферат
Спосіб визначення швидкості руху та кута сходу авіаційних засобів ураження (АЗУ) з використанням цифрових засобів відеореєстрації, який полягає в тому, що визначають розмір характерних деталей зображення на кадрі та масштаб зображення об'єкта, який відрізняється тим, що розраховують мірну базу, вводять поправку на висоту АЗУ до знятої координати, здійснюють інвертування осі Y вихідної системи координат та перетворення знятих координат з вихідної системи координат до вибраної системи координат, розраховують кут горизонту відносно бази, кут її повороту та кут повороту нової системи координат, здійснюють розворот координат АЗУ в новій системі координат, розраховують висоту та горизонтальну відстань АЗУ відносно вибраної точки, розраховують кут сходу та швидкість руху АЗУ.
Текст
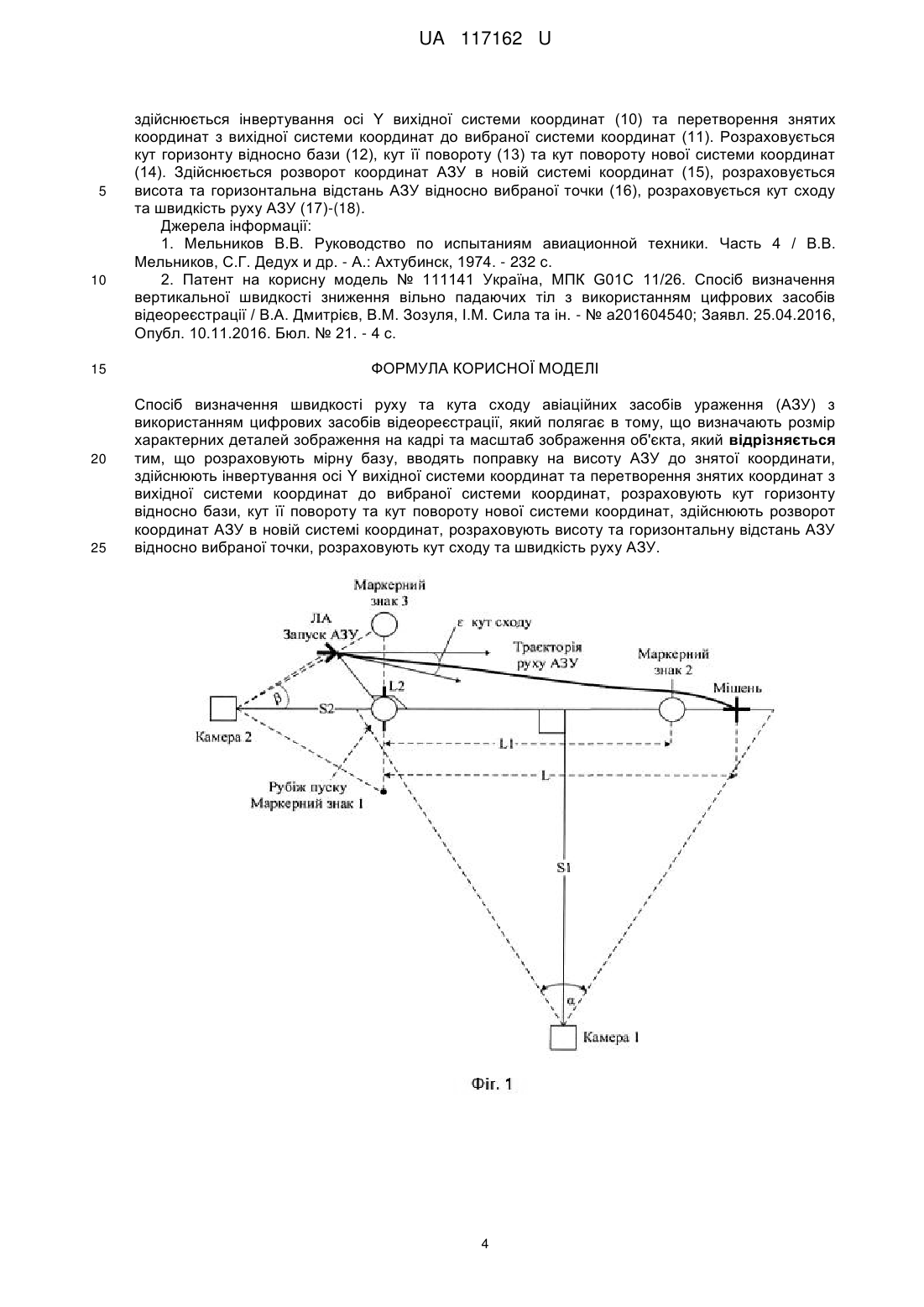
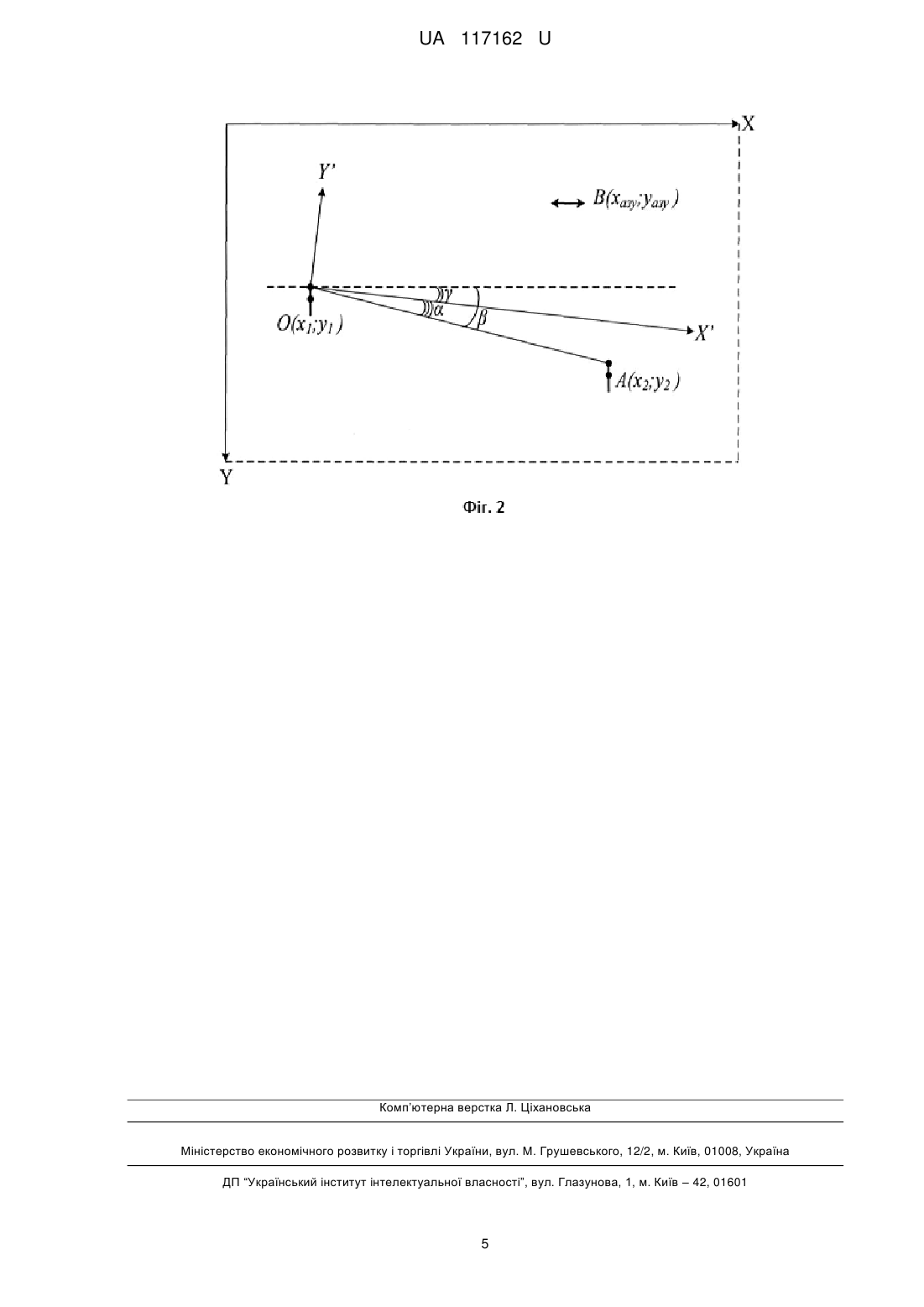
Реферат: Спосіб визначення швидкості руху та кута сходу авіаційних засобів ураження (АЗУ) з використанням цифрових засобів відеореєстрації полягає в тому, що визначають розмір характерних деталей зображення на кадрі та масштаб зображення об'єкта. Розраховують мірну базу, вводять поправку на висоту АЗУ до знятої координати, здійснюють інвертування осі Y вихідної системи координат та перетворення знятих координат з вихідної системи координат до вибраної системи координат, розраховують кут горизонту відносно бази, кут її повороту та кут повороту нової системи координат, здійснюють розворот координат АЗУ в новій системі координат, розраховують висоту та горизонтальну відстань АЗУ відносно вибраної точки, розраховують кут сходу та швидкість руху АЗУ. UA 117162 U (12) UA 117162 U UA 117162 U 5 10 Корисна модель належить до радіотехніки і може бути використана при проведенні випробувань авіаційних засобів ураження. Відомий спосіб визначення швидкості руху та кута сходу [1], який полягає у тому, що на основі застосування кінозйомки визначаються параметри руху авіаційних засобів ураження (АЗУ). Недоліком відомого способу є те, що складність процесів проведення кінозйомки, обробки кіноплівки, зняття результатів з негативів не завжди гарантує достовірність отриманих результатів. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є "Спосіб визначення вертикальної швидкості зниження вільнопадаючих тіл з використанням цифрових засобів відеореєстрації" [2], який полягає у визначенні вертикальної швидкості зниження при проведенні стрибків з парашутами. 1. Визначається розмір (у пікселях) характерних деталей зображення на кадрі: k x1 x 2 2 y1 y 2 2 , (1) 15 де x 1 , y 1 - координати початку зображення об'єкта; x 2 , y 2 - координати кінця зображення об'єкта. 2. Визначається масштаб зображення об'єкта: M K K k n1 k n2 , (2) 2 20 де K - фактична довжина об'єкта, м. 3. Визначається додаток на можливе зсування камери у вертикальній площині: hзс y 0n1 y 0n2 , 25 де y 0n1 , y 0n2 - ординати положення наземного орієнтиру відповідно на кадрі n1 та n 2 . 4. Визначається різність висот об'єкта на кадрах n1 та n 2 : h y Цn1 yЦn2 hзс , 30 N , f 45 (5) де N - кількість кадрів, за аналізований період, N n2 n1 ; f - частота зйомки, кадр/сек. 6. Визначається вертикальна швидкість зниження: Vзп 40 (4) де y Цn1 , y Цn2 - ординати центру мас об'єкта відповідно на кадрі n1 та n 2 . 5. Визначається інтервал часу між кадрами n1 та n 2 : t 35 (3) Mh , t (6) За результатами розрахунків формується таблиця результатів розрахунків. Недоліком способу-прототипу є те, що він не забезпечує визначення швидкості руху та кута сходу авіаційного засобу ураження після здійснення запуску, крім того, в ньому не проведено розрахунок мірної бази. В основу корисної моделі поставлена задача створити спосіб визначення швидкості руху та кута сходу авіаційних засобів ураження з використанням цифрових засобів відеореєстрації, який дозволить, в умовах відсутності засобів зовнішньотраєкторних вимірювань, здійснювати оцінку параметрів траєкторії руху АЗУ. 1 UA 117162 U 5 Поставлена задача вирішується тим, що здійснюється розрахунок схеми розміщення мірної бази (відстаней L та S ). Така схема розміщення дозволить зафіксувати двома нерухомими відеокамерами траєкторію руху АЗУ (приблизно 3 км). При цьому враховуються такі характеристики відеокамер, як кути зору та (кути розкриття об'єктивів) таким чином, щоб виконувалось співвідношення: S1 L 2tg S2 H 2tg 10 15 20 2 2 , , горизонтальної площини знаків один відносно одного h1 та h 2 , м, напрямок лінії розмітки мірної бази - магнітний курс зльоту, градуси, відомості про геометричні розміри літального апарату та АЗУ. Далі, в доповнення до (1)-(2), визначається швидкість руху та кут сходу авіаційних засобів ураження за наступним алгоритмом оцінки параметрів траєкторії руху АЗУ: 1. Вводиться поправка на висоту АЗУ до знятої координати в пікселях: (10) 3. Здійснюється перетворення знятих координат з вихідної системи координат до вибраної системи координат за допомогою паралельного переносу: x x 2 x1, y y 2 y1, 35 (9) 2. Здійснюється інвертування осі Y вихідної системи координат (від верхнього лівого кута: X - вправо, Y - вниз): Y Y . 30 (8) де L - відстань між мішенню та рубежем стрільби; S1 - відстань від камери 1 до площини подій; - кут зору відеокамери 1 по горизонталі; H - висота літака-носія над рубежем стрільби; S2 - відстань від камери 2 до рубежу стрільби; - кут зору відеокамери 2 по вертикалі. Для забезпечення обробки відеоматеріалів при проведенні записів траєкторії руху АЗУ фіксуються: фактичні відстані між спеціальними знаками L 1 та L 2 , м, перевищення відносно h h2 . YАЗУ YАЗУ 1 M 25 (7) (11) де x 2 , y 2 - координати спеціального знаку або АЗУ, пікс; x 1 , y 1 - координати спеціального знаку, який вибраний за точку відліку, пікс. 4. Розраховується кут горизонту відносно бази (кут між лінією бази та лінією горизонту) за одним з варіантів: по заданим перевищенням відносно горизонтальної плоскості правого (на кадрі) спеціального знаку h1 над лівим h 2 : h h2 . arcsin 1 L (12) 40 5. Розраховується кут повороту бази: 2 UA 117162 U arcsin y . k (13) Якщо координата x ЛА має знак "-", то . 6. Розраховується кут повороту нової системи координат: . (14) 5 7. Здійснюється розворот координат АЗУ в новій системі координат: x v x АЗУ cos y АЗУ sin , . y v y АЗУ cos x АЗУ sin , 10 (15) де x v , y v - координати точки у системі координат, приведеній до істинного горизонту. 8. Розраховується висота та горизонтальна відстань АЗУ відносно обраної точки: S x v M, (16) H y v M. 9. Розраховується кут сходу АЗУ: arctg y ТП y м , x ТП x м (17) 15 20 де x ТП , y ТП - координати точки пуску АЗУ; x м , y м - координати мішені у новій системі координат. 10. Розраховується швидкість руху АЗУ: швидкість руху АЗУ - це миттєва швидкість, що розраховується як відносне переміщення зображення АЗУ між двома сусідніми кадрами (кадр сходу АЗУ та наступний), розрахунок проводиться за формулою: V 25 30 35 40 x ТП 1 x ТП 2 y ТП 1 y ТП 2 t , (18) де t 1 - період оновлення кадру; f f - частота реєстрації відеокамери; x ТП 1, y ТП 1 - координати АЗУ на наступному після запуску кадрі. За результатами вимірювань дані представляються у вигляді таблиці результатів розрахунків з такими стовпчиками: час, секунди (з частотою реєстрації); координати X , м, координати Y , м; швидкість вертикальна, м/с; швидкість горизонтальна, м/с, кут сходу, град., абсолютна та миттєва швидкість руху, м. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у тому, що в умовах відсутності засобів зовнішньотраєкторних вимірювань, за рахунок реалізації алгоритму оцінки параметрів траєкторії руху АЗУ (1)-(2) та (9)-(18) та завдяки розрахунку мірної бази (7)-(8), забезпечується можливість розрахунку швидкості руху та кута сходу АЗУ з використанням цифрових засобів відеореєстрації. На фіг. 1 зображений варіант розміщення мірної бази. На фіг. 2 зображено розташування характерних деталей зображення на кадрі. Суть запропонованого способу визначення швидкості руху та кута сходу авіаційних засобів ураження з використанням цифрових засобів відеореєстрації полягає в тому, що зміст таблиці результатів розрахунків формується шляхом реалізації алгоритму оцінки параметрів траєкторії руху АЗУ (1)-(2) та (9)-(18) та завдяки розрахунку мірної бази (7)-(8), при цьому визначається розмір характерних деталей зображення на кадрі та масштаб зображення об'єкта (1)-(2). Розраховується мірна база (7)-(8), вводиться поправка на висоту АЗУ до знятої координати (9), 3 UA 117162 U 5 10 15 20 25 здійснюється інвертування осі Y вихідної системи координат (10) та перетворення знятих координат з вихідної системи координат до вибраної системи координат (11). Розраховується кут горизонту відносно бази (12), кут її повороту (13) та кут повороту нової системи координат (14). Здійснюється розворот координат АЗУ в новій системі координат (15), розраховується висота та горизонтальна відстань АЗУ відносно вибраної точки (16), розраховується кут сходу та швидкість руху АЗУ (17)-(18). Джерела інформації: 1. Мельников В.В. Руководство по испытаниям авиационной техники. Часть 4 / В.В. Мельников, С.Г. Дедух и др. - А.: Ахтубинск, 1974. - 232 с. 2. Патент на корисну модель № 111141 Україна, МПК G01C 11/26. Спосіб визначення вертикальної швидкості зниження вільно падаючих тіл з використанням цифрових засобів відеореєстрації / В.А. Дмитрієв, В.М. Зозуля, І.М. Сила та ін. - № а201604540; Заявл. 25.04.2016, Опубл. 10.11.2016. Бюл. № 21. - 4 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб визначення швидкості руху та кута сходу авіаційних засобів ураження (АЗУ) з використанням цифрових засобів відеореєстрації, який полягає в тому, що визначають розмір характерних деталей зображення на кадрі та масштаб зображення об'єкта, який відрізняється тим, що розраховують мірну базу, вводять поправку на висоту АЗУ до знятої координати, здійснюють інвертування осі Y вихідної системи координат та перетворення знятих координат з вихідної системи координат до вибраної системи координат, розраховують кут горизонту відносно бази, кут її повороту та кут повороту нової системи координат, здійснюють розворот координат АЗУ в новій системі координат, розраховують висоту та горизонтальну відстань АЗУ відносно вибраної точки, розраховують кут сходу та швидкість руху АЗУ. 4 UA 117162 U Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 11/26
Мітки: використанням, визначення, засобів, спосіб, цифрових, кута, швидкості, відеореєстрації, авіаційних, ураження, руху, сходу
Код посилання
<a href="https://ua.patents.su/7-117162-sposib-viznachennya-shvidkosti-rukhu-ta-kuta-skhodu-aviacijjnikh-zasobiv-urazhennya-z-vikoristannyam-cifrovikh-zasobiv-videoreehstraci.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення швидкості руху та кута сходу авіаційних засобів ураження з використанням цифрових засобів відеореєстрації</a>
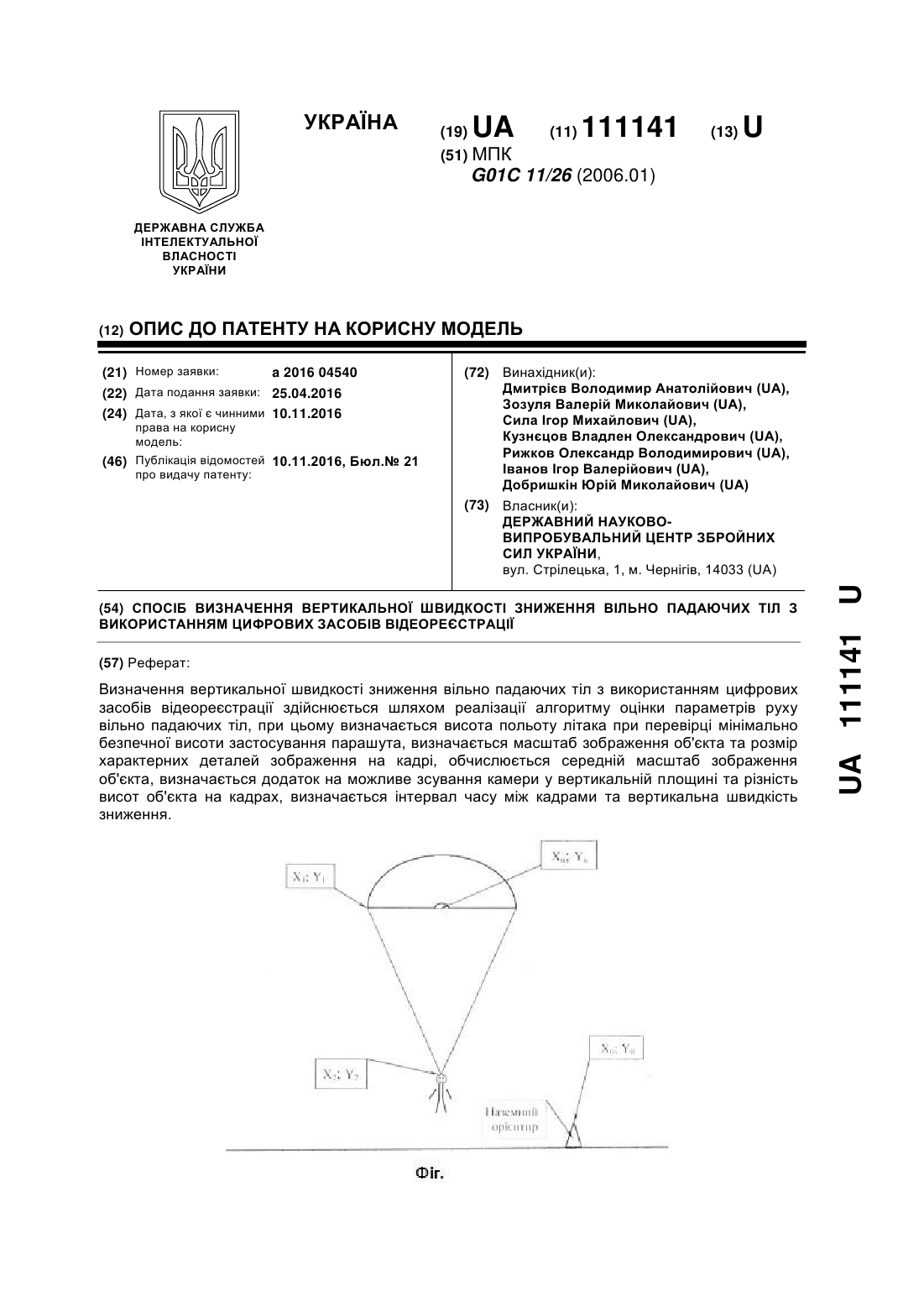
Спосіб визначення вертикальної швидкості зниження вільно падаючих тіл з використанням цифрових засобів відеореєстрації
Номер патенту: 111141
Опубліковано: 10.11.2016
Автори: Кузнєцов Владлен Олександрович, Іванов Ігор Валерійович, Зозуля Валерій Миколайович, Дмитрієв Володимир Анатолійович, Сила Ігор Михайлович, Добришкін Юрій Миколайович, Рижков Олександр Володимирович
МПК: G01C 11/26
Мітки: відеореєстрації, визначення, цифрових, швидкості, зниження, падаючих, засобів, спосіб, вертикальної, тіл, вільної, використанням
Формула / Реферат:
Спосіб визначення вертикальної швидкості зниження вільно падаючих тіл з використанням цифрових засобів відеореєстрації, який полягає в тому, що визначається висота польоту літака при перевірці мінімально безпечної висоти застосування парашута, визначається масштаб зображення об'єкта, який відрізняється тим, що визначається розмір характерних деталей зображення на кадрі, обчислюється середній масштаб зображення об'єкта, визначається додаток...
Спосіб визначення швидкості руху та координат транспортних засобів з подальшою їх ідентифікацією та автоматичною реєстрацією порушень правил дорожнього руху та пристрій для його реалізації
Номер патенту: 105418
Опубліковано: 12.05.2014
Автори: Осіпов Сєргєй Константіновіч, Малінкін Алєксєй Юрьєвіч
МПК: G08G 1/017, G08G 1/054, G07C 5/00
Мітки: пристрій, ідентифікацією, правил, транспортних, автоматичною, подальшою, реалізації, засобів, визначення, швидкості, спосіб, реєстрацією, координат, порушень, дорожнього, руху
Формула / Реферат:
1. Спосіб визначення швидкості руху і координат транспортних засобів з подальшою їх ідентифікацією і автоматичною реєстрацією порушень правил дорожнього руху, який передбачає випромінювання у напрямку транспортних засобів, які рухаються по ділянці дорожнього полотна, імпульсів електромагнітного випромінювання, прийом імпульсів відбитого електромагнітного випромінювання, обчислення дальності і швидкості руху транспортного засобу шляхом...
Спосіб визначення швидкості руху насіння в потоці
Номер патенту: 41300
Опубліковано: 12.05.2009
Автори: Гольша Віталій Ігорович, Лушников Вячеслав Михайлович, Пархоменко Юрій Михайлович, Пархоменко Михайло Давидович
Мітки: спосіб, руху, визначення, потоці, швидкості, насіння
Формула / Реферат:
Спосіб визначення швидкості руху насіння в потоці, що включає використання пристрою реєстрації насіння в потоці, в якому насіння, що пролітає через верхню та нижню зони паралельних площин контролю, виконаних кожна у вигляді прямокутника з координатами X та Y, двома сторонами якого є оптичні пристрої паралельного світлового потоку з імпульсними джерелами світла та блоками їх запуску, навпроти яких розміщені дискретні світлочутливі лінійки,...
Застосування способу визначення коефіцієнта сумарного опору руху транспортного засобу для об’єктивного нормування середньої швидкості руху при навчанні водіння бойових машин
Номер патенту: 55431
Опубліковано: 10.12.2010
Автори: Чаган Юрій Анатолійович, Чорний Микола Васильович
МПК: G09B 9/02
Мітки: способу, засобу, об'єктивного, бойових, швидкості, сумарного, середньої, нормування, коефіцієнта, застосування, визначення, руху, навчанні, транспортного, машин, водіння, опору
Формула / Реферат:
Застосування способу визначення коефіцієнта сумарного опору руху транспортного засобу для об'єктивного нормування середньої швидкості руху при навчанні водіння бойових машин за енергетичними затратами.
Спосіб визначення швидкості руху тракторного агрегату для транспортування плодів
Номер патенту: 53358
Опубліковано: 15.01.2003
Автори: Паславський Ростислав Ігорович, Шевчук Роман Степанович, Миронюк Олег Сергійович
МПК: A01D 90/00
Мітки: агрегату, руху, швидкості, тракторного, визначення, плодів, транспортування, спосіб
Формула / Реферат:
Спосіб визначення швидкості руху тракторного агрегату для транспортування плодів, що включає встановлення швидкості руху за умовами максимальної продуктивності перевезень і допустимих коливань на робочому місці тракториста-машиніста, який відрізняється тим, що додатково встановлюють швидкість руху за умовою допустимих коливань на робочій платформі агрегатованого з трактором причепа, а експлуатаційну швидкість руху агрегату вибирають як...
Попередній патент: Роторний двигун внутрішнього згорання
Наступний патент: Багатопозиційний пневмоелектричний привод
Випадковий патент: Спосіб формування уретеронеоцистоанастомозу після резекції сечоводу по довжині і ширині з приводу уретерогідронефрозу