Система стабілізації траєкторії руху автогрейдера за допомогою коригування кута повороту коліс
Номер патенту: 120651
Опубліковано: 10.11.2017
Автори: Максимів Юлія Миколаївна, Щербак Олег Віталійович, Шевченко Валерій Олександрович, Чаплигіна Олександра Михайлівна
Формула / Реферат
Система стабілізації траєкторії руху автогрейдера за допомогою коригування кута повороту коліс, що включає гідравлічну систему управління ходовим обладнанням, що складається з насоса, розподільника, виконавчих гідроциліндрів, яка відрізняється тим, що на балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти з електричним управлінням, два гідронасоси, вихідні патрубки яких з'єднані з порожнинами пристрою типу сопло-заслінка, з пристрою сигнал подається через електромеханічний перетворювач до гідророзподільника, для коригування траєкторії руху автогрейдера, вихідні магістралі гідророзподільника з'єднані з виконавчими порожнинами силових гідроциліндрів повороту коліс передньої осі, що створює протидію величині дестабілізуючого моменту в горизонтальній площині, що дозволяє утримати машину на запланованій траєкторії.
Текст
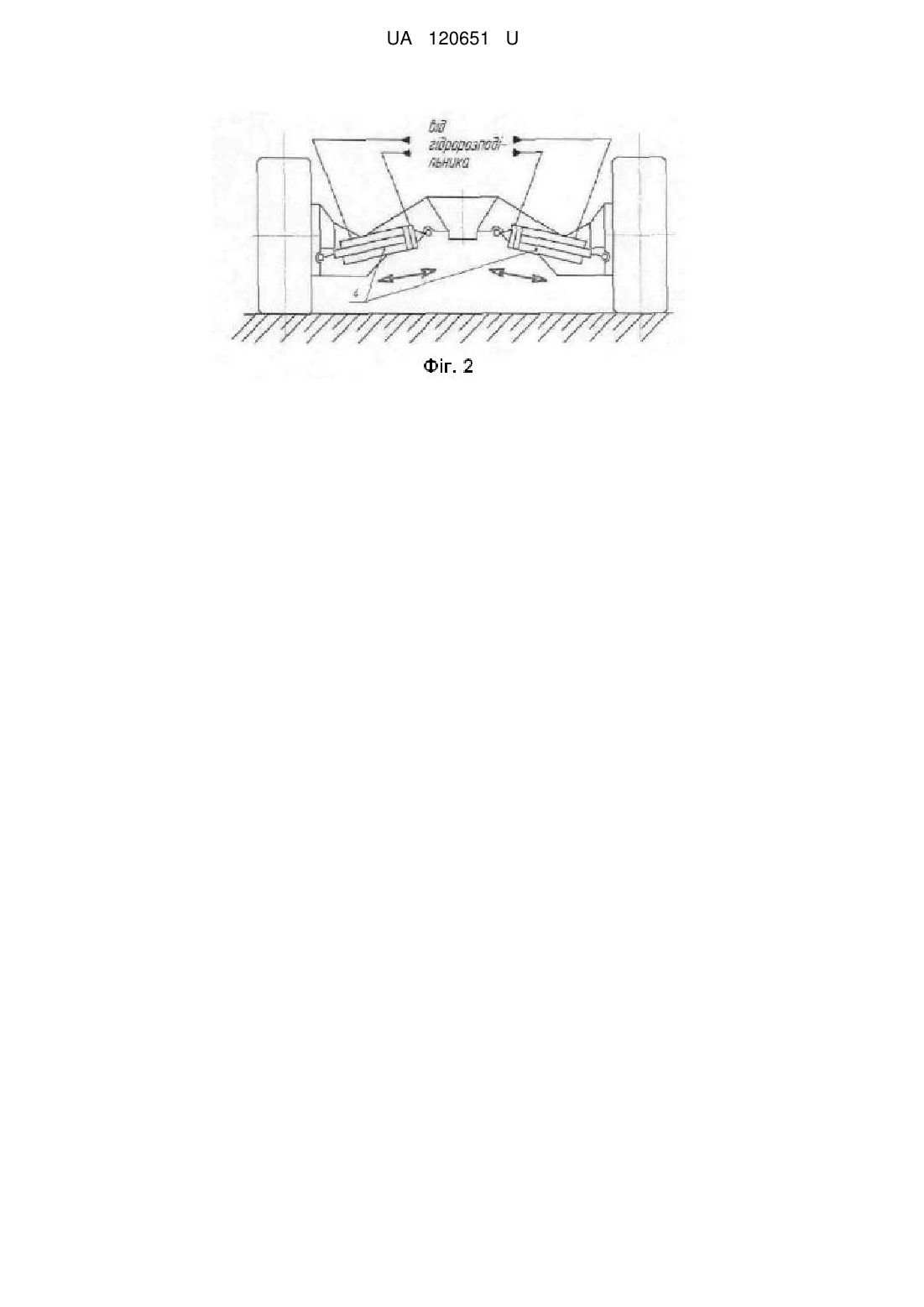
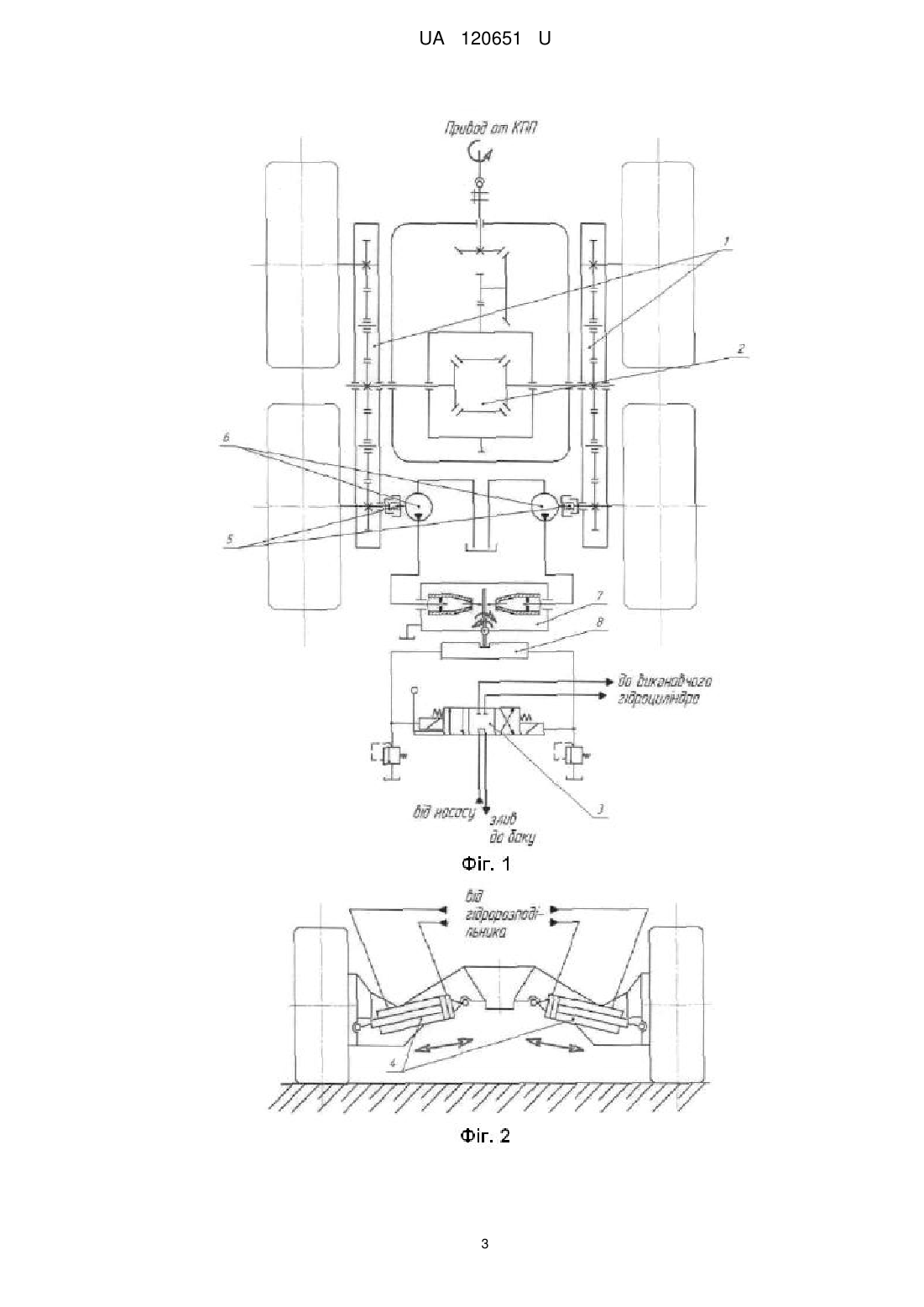
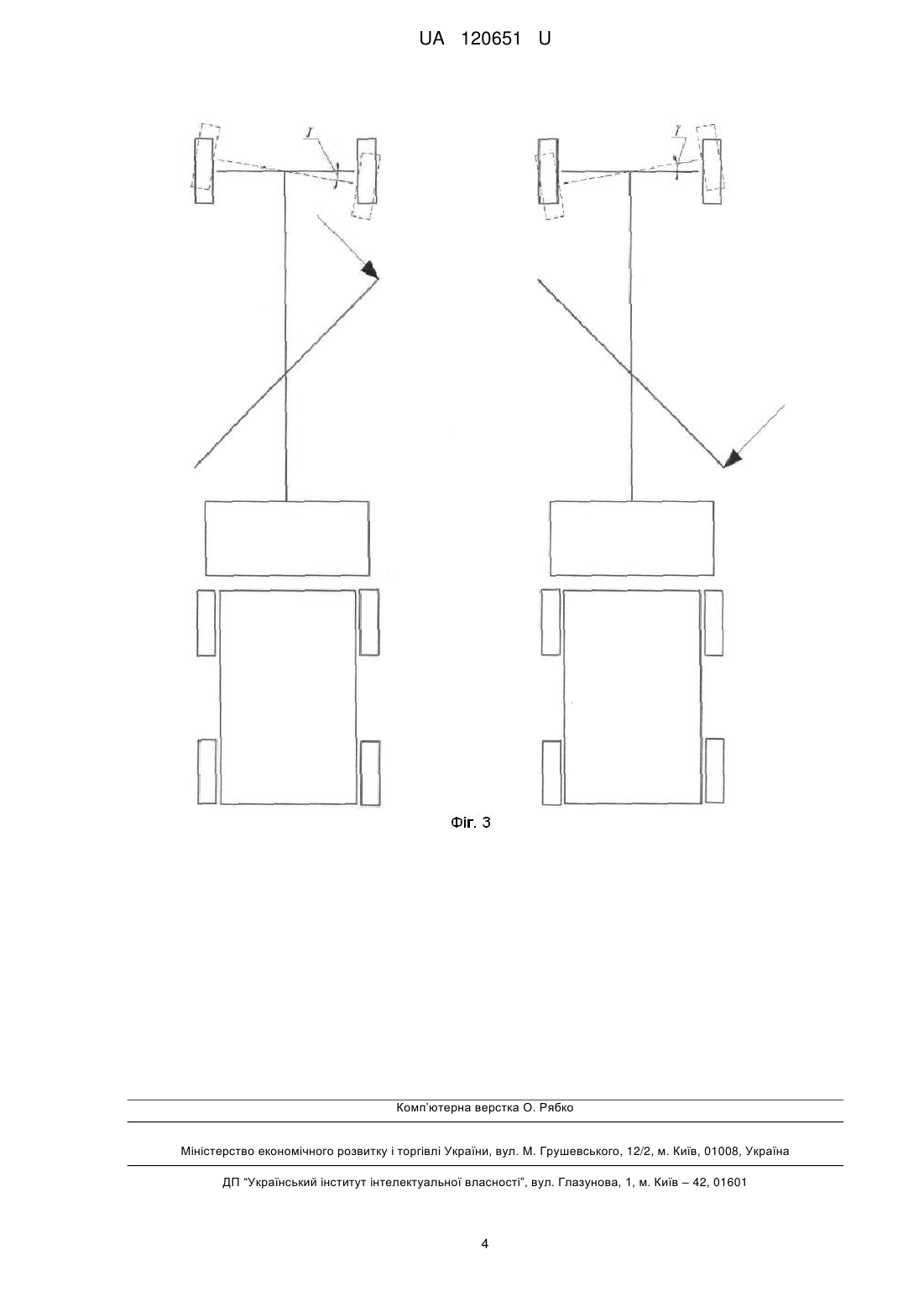
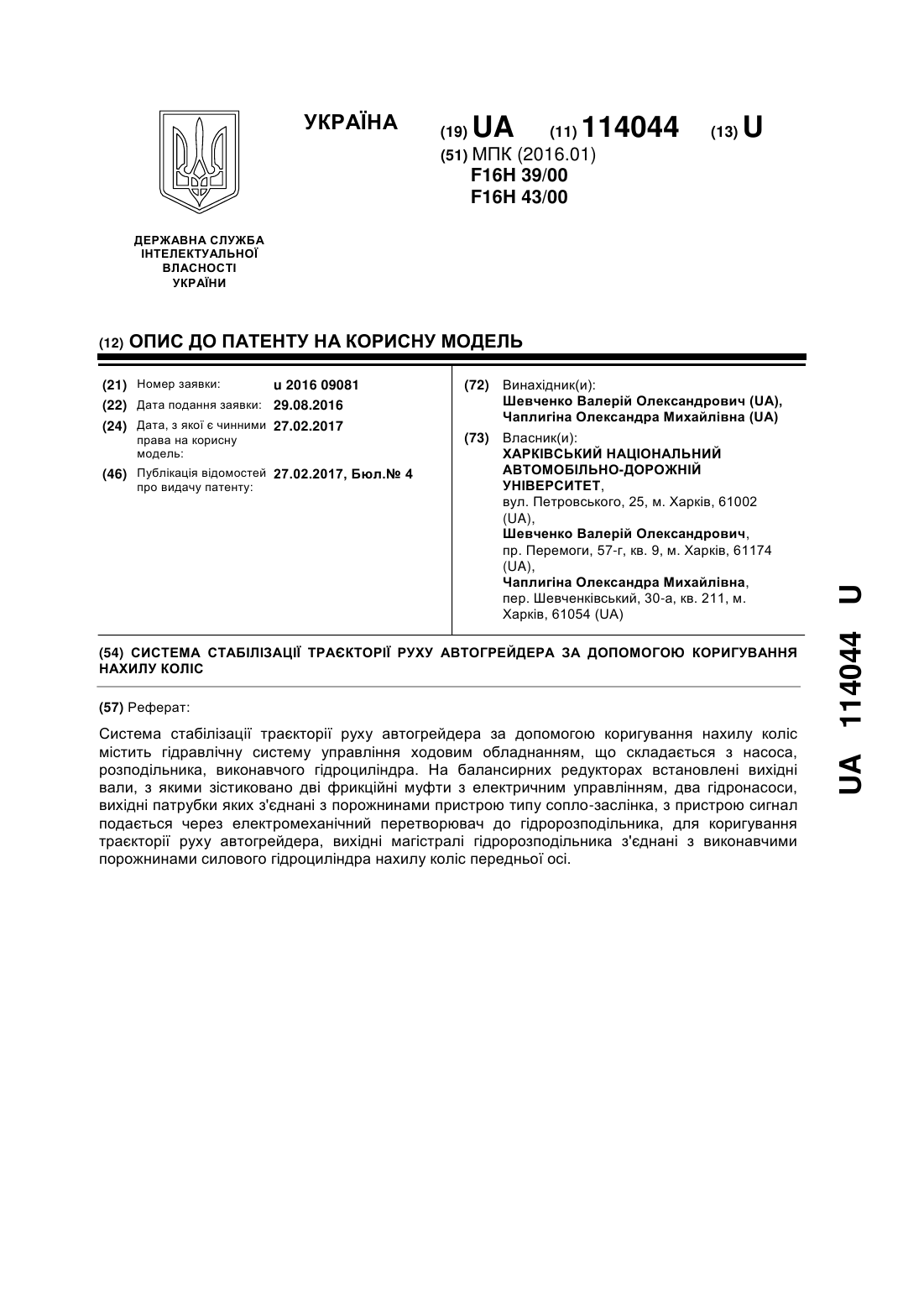
Реферат: Система стабілізації траєкторії руху автогрейдера за допомогою коригування кута повороту коліс включає гідравлічну систему управління ходовим обладнанням, що складається з насоса, розподільника, виконавчих гідроциліндрів, причому на балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти з електричним управлінням, два гідронасоси, вихідні патрубки яких з'єднані з порожнинами пристрою типу сопло-заслінка, з пристрою сигнал подається через електромеханічний перетворювач до гідророзподільника, для коригування траєкторії руху автогрейдера, вихідні магістралі гідророзподільника з'єднані з виконавчими порожнинами силових гідроциліндрів повороту коліс передньої осі, що створює протидію величині дестабілізуючого моменту в горизонтальній площині, що дозволяє утримати машину на запланованій траєкторії. UA 120651 U (12) UA 120651 U UA 120651 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до машинобудування, зокрема до гідравлічної системи автогрейдера, і може бути використана для стабілізації траєкторії руху землерийнотранспортних машин (ЗТМ). Найбільш близьким до запропонованої корисної моделі за принципом та суттю є гідросистема мобільної машини [Пат. 2158861 Российская федерация, МПК F 16 Н 39/02. Гидросистема мобильной машины / Мельников А.В.; заявитель и патентообладатель ОАО "Специальное конструкторское бюро приборостроения и автоматики". - № 98111405/28; заявл. 15.06.98; опубл. 10.11.00], яка передбачає встановлення до гідравлічної системи мобільної машини додаткового пропорційного золотникового клапана з електроуправлінням, датчика положення люльки насоса, датчика тиску в робочій порожнині насоса, пристрою управління пропорційним золотниковим клапаном, причому входи пропорційного золотникового клапана і датчика тиску з'єднані з магістраллю, яка підключається до поршневої порожнини кожного виконавчого механізму гідросистеми, а вихід пропорційного золотникового клапана - зі зливом, входи пристрою управління з'єднані з виходами датчика тиску і датчика положення люльки насоса, а вихід - з керуючим входом пропорційного золотникового клапана. До недоліків розглянутої гідравлічної системи належить її функціональна обмеженість і складність конструкції. Управління швидкістю виконавчого механізму проводиться релейно, за рахунок підключення до силових магістралей допоміжного насоса. Дана система не дозволяє здійснювати плавну зміну швидкості і напряму обертання виконавчого механізму. Корисна модель направлена на розширення функціональних можливостей гідросистеми мобільної машини і зниження її енерговитрат, але не дозволяє стабілізувати траєкторію руху машини. В основу запропонованої корисної моделі поставлено задачу вдосконалити гідравлічну систему машини таким чином, щоб дійсна траєкторія руху машини не відхилялася від запланованої, за допомогою системи управління ходовим обладнанням, а саме повороту коліс передньої осі у горизонтальній площині, що дозволяє коригувати напрям траєкторії руху під час дії позацентрово прикладеного зусилля діючого на відвал автогрейдера. Поставлена задача вирішується завдяки тому, що при повороті коліс передньої осі в горизонтальній площині на кут γ формується протидія зусилля, діючого на відвал автогрейдера, що дозволяє утримати машину на запланованій траєкторії. На фіг. 1-2 зображена схема запропонованої корисної моделі, що включає в себе трансмісію, яка складається з двох бортових редукторів 1, головної передачі з диференціалом 2, гідромеханічної коробки перемикання передач (ГМКПП), а також гідравлічної системи керування робочим обладнанням, яка складається з насоса, розподільника 3, виконавчого гідроциліндра 4 (фіг. 2). З метою стабілізації траєкторії руху автогрейдера, на балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти 5 з електричним управлінням з кабіни, два гідронасоси 6, вихідні патрубки яких з'єднані з порожнинами пристрою типу сопло-заслінка 7. Зміщення заслінки фіксується електромеханічним перетворювачем 8 і перетворюється в керуючий сигнал, направлений до гідророзподільника 3 з електричним управлінням. Для коригування траєкторії руху вихідні магістралі гідророзподільника 3 з'єднані з виконавчими порожнинами силових гідроциліндрів 4 механізму повороту коліс передньої осі у горизонтальній площині (фіг. 2). Поворот коліс на кут призводить до зміни напряму зусилля, діючого на відвал автогрейдера, що формує траєкторію руху машини. Поворот коліс переднього мосту в горизонтальній площині повинен коригуватись в залежності від напряму головного вектора сил опору на відвалі, а кут повороту залежить від значення дестабілізуючого моменту на відвалі, який виникає завдяки дії сил опору (фіг. 3). Система стабілізації траєкторії руху автогрейдера працює наступним чином. Під час руху автогрейдера в процесі розробки робочого середовища виникає явище буксування лівого чи правого борту, яке обумовлено позацентрово прикладеними силами, що виникають під час розробки середовища. Ці сили викликають дію дестабілізуючих моментів в горизонтальній та вертикальній площині, які сприяють мимовільному розвороту машини. Щоб зменшити величину дестабілізуючих моментів і вирівняти співвідношення опорних реакцій по бортах змінюється конструкція колісних півосей. Встановлено додаткові муфти 5 з електроуправлінням, які включаються оператором під час розробки середовища і виключаються під час транспортного руху машини, два насоси 6, напорні магістралі яких під'єднано до пристрою типу сопло-заслінка 7. Зміщення заслінки фіксується електромеханічним перетворювачем 8 і перетворюється в керуючий сигнал, направлений до гідророзподільника 3, який має ручне та гідравлічне управління. Система регулюється оператором з кабіни. Оператор включає систему в процесі розробки середовища, коли гідроциліндри знаходяться в нейтральному стані. У процесі роботи за рахунок дії дестабілізуючих моментів з боку розроблюваного середовища відбувається перерозподіл опорних реакцій, що призводить до зміни швидкості обертання коліс лівого та 1 UA 120651 U 5 10 15 20 правого борту. Відповідно подача рідини від гідронасосів 6 буде різною, що призведе до зміщення заслінки та генерації керуючого сигналу електромеханічним перетворювачем 8. Отриманий керуючий сигнал призведе до перемикання гідророзподільника 3 і подачі рідини до робочих порожнин виконавчих гідроциліндрів 4. Гідроциліндри 4 здійснюють поворот колісного обладнання на кут , що створює протидію напряму дестабілізуючого моменту в горизонтальній площині, що дозволяє утримати машину на запланованій траєкторії. Розроблена корисна модель може бути використана для стабілізації руху автогрейдера під час виконання робочих операцій та для ЗТМ, які мають подібне ходове обладнання. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Система стабілізації траєкторії руху автогрейдера за допомогою коригування кута повороту коліс, що включає гідравлічну систему управління ходовим обладнанням, що складається з насоса, розподільника, виконавчих гідроциліндрів, яка відрізняється тим, що на балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти з електричним управлінням, два гідронасоси, вихідні патрубки яких з'єднані з порожнинами пристрою типу сопло-заслінка, з пристрою сигнал подається через електромеханічний перетворювач до гідророзподільника, для коригування траєкторії руху автогрейдера, вихідні магістралі гідророзподільника з'єднані з виконавчими порожнинами силових гідроциліндрів повороту коліс передньої осі, що створює протидію величині дестабілізуючого моменту в горизонтальній площині, що дозволяє утримати машину на запланованій траєкторії. 2 UA 120651 U 3 UA 120651 U Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 43/00, F16H 39/00
Мітки: коліс, система, повороту, коригування, допомогою, автогрейдера, кута, стабілізації, траєкторії, руху
Код посилання
<a href="https://ua.patents.su/6-120651-sistema-stabilizaci-traehktori-rukhu-avtogrejjdera-za-dopomogoyu-koriguvannya-kuta-povorotu-kolis.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації траєкторії руху автогрейдера за допомогою коригування кута повороту коліс</a>
Система стабілізації траєкторії руху автогрейдера за допомогою коригування нахилу коліс
Номер патенту: 114044
Опубліковано: 27.02.2017
Автори: Чаплигіна Олександра Михайлівна, Шевченко Валерій Олександрович
МПК: F16H 39/00, F16H 43/00
Мітки: руху, система, автогрейдера, коригування, коліс, траєкторії, нахилу, допомогою, стабілізації
Формула / Реферат:
Система стабілізації траєкторії руху автогрейдера за допомогою коригування нахилу коліс, що містить гідравлічну систему управління ходовим обладнанням, що складається з насоса, розподільника, виконавчого гідроциліндра, яка відрізняється тим, що на балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти з електричним управлінням, два гідронасоси, вихідні патрубки яких з'єднані з порожнинами пристрою типу...
Система стабілізації траєкторії руху автогрейдера
Номер патенту: 114013
Опубліковано: 27.02.2017
Автори: Шевченко Валерій Олександрович, Чаплигіна Олександра Михайлівна
МПК: F16H 43/00, F16H 39/00
Мітки: система, автогрейдера, руху, траєкторії, стабілізації
Формула / Реферат:
Система стабілізації траєкторії руху автогрейдера, що представляє гідравлічну систему управління робочим обладнанням, що складається з насоса, розподільника, виконавчого гідроциліндра, яка відрізняється тим, що з метою стабілізації траєкторії руху автогрейдера на балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти з електричним управлінням, два гідронасоси, вихідні патрубки яких з'єднані з порожнинами...
Система стабілізації траєкторії руху землерийно-транспортних машин
Номер патенту: 116183
Опубліковано: 10.05.2017
Автори: Шевченко Валерій Олександрович, Чаплигіна Олександра Михайлівна, Буханцова Ганна Дмитрівна
МПК: B60B 15/08, B60B 15/26
Мітки: траєкторії, руху, стабілізації, машин, землерийно-транспортних, система
Формула / Реферат:
Система стабілізації траєкторії руху землерийно-транспортних машин, що являє собою механічну систему, установлену на колеса, що включає в себе пневматичну шину, обід, пластинчасті ґрунтозачепи, диск, на поверхні якого симетрично розташовані пальці, кожен пластинчастий ґрунтозачіп містить сережки, штангу і опорний башмак, який містить майданчик, пластину і сережку та підпружинений за допомогою пружини, яка відрізняється тим, що ґрунтозачепи...
Перетворювач кута повороту антени рлс в код синуса кута повороту
Номер патенту: 28555
Опубліковано: 10.12.2007
Автор: Ніколенко Сергій Іванович
МПК: G08C 19/00
Мітки: рлс, код, кута, повороту, антени, перетворювач, синуса
Формула / Реферат:
Перетворювач кута повороту антени РЛС в код синуса кута повороту, що містить потенціометричний датчик синуса кута повороту вала, вхідна вісь якого з'єднана з антеною РЛС, а його вихід з'єднаний із входом аналого-цифрового перетворювача (АЦП), який відрізняється тим, що в нього введені другий АЦП, вхід якого підключений до входу опорної напруги, і блок інтерфейсу з шиною вводу-виводу комп'ютера, входи якого підключені до виходів першого і...
Пристрій реєстрації кута повороту вала за допомогою датчика магнітного поля
Номер патенту: 20600
Опубліковано: 15.01.2007
Автори: Марковський Геннадій Борисович, Долінний Анатолій Степанович
МПК: G01B 7/00
Мітки: магнітного, реєстрації, допомогою, пристрій, поля, повороту, вала, кута, датчика
Формула / Реферат:
Пристрій реєстрації кута повороту вала, який складається з постійного магніту, що обертається синхронно з валом, датчика реєстрації рівня магнітного поля, лінії зв'язку, блока оброблення даних, який відрізняється тим, що реєстрація кута повороту вала здійснюється з великою роздільною здатністю, безконтактно, за зміною рівня магнітного поля при обертанні магніту, є стійким до умов навколишнього середовища і має великий ресурс напрацювання.
Попередній патент: Спосіб виробництва порошку грибного з печериць, шиїтаке та фламуліни
Наступний патент: Спосіб профілактики тромбозу синтетичного судинного шунта
Випадковий патент: Пристрій для проведення зовнішньої вентрикулостомії