Спосіб формування польотного завдання безпілотного літального апарата
Номер патенту: 122934
Опубліковано: 25.01.2018
Автори: Воротніков Володимир Володимирович, Гуменюк Ігор Володимирович

Формула / Реферат
Спосіб формування польотного завдання безпілотного літального апарату, за яким вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування, прив'язують ці координати до цифрової карти місцевості, розраховують за ними опорні точки маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор, отримують маршрут польоту апарату, маршрут закладають та зберігають в пам'яті БпЛА, який відрізняється тим, що розраховують відстані між опорними точками маршруту, формують таблицю відстаней між ними, прив'язують введені координати до цифрової карти місцевості, розв'язують транспортну задачу для множини просторово розподілених координат опорних точок, перенумеровують опорні точки маршруту, змінюють порядок прольоту через опорні точки, отримують новий маршрут польоту апарату з мінімальною відстанню.
Текст
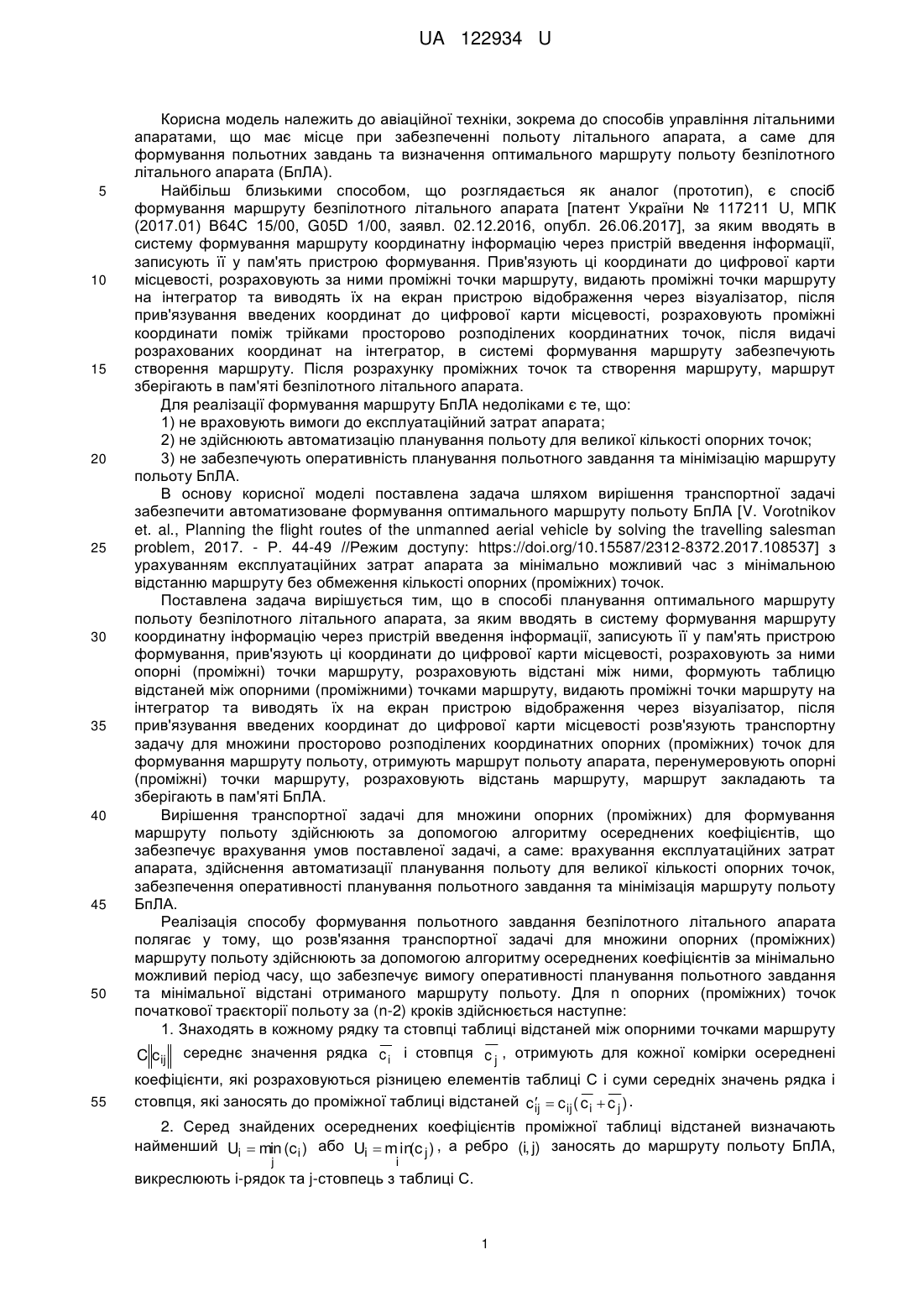
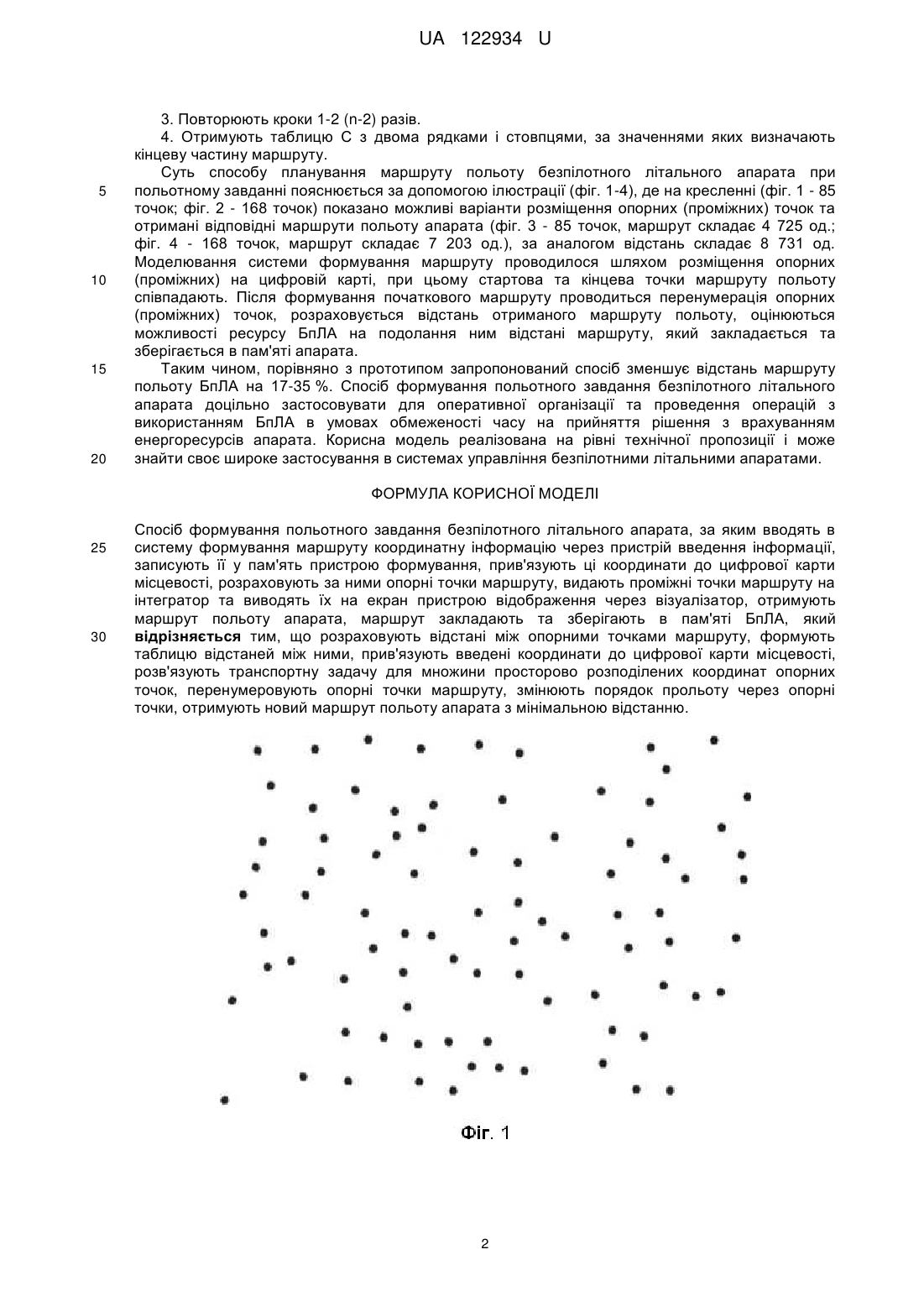
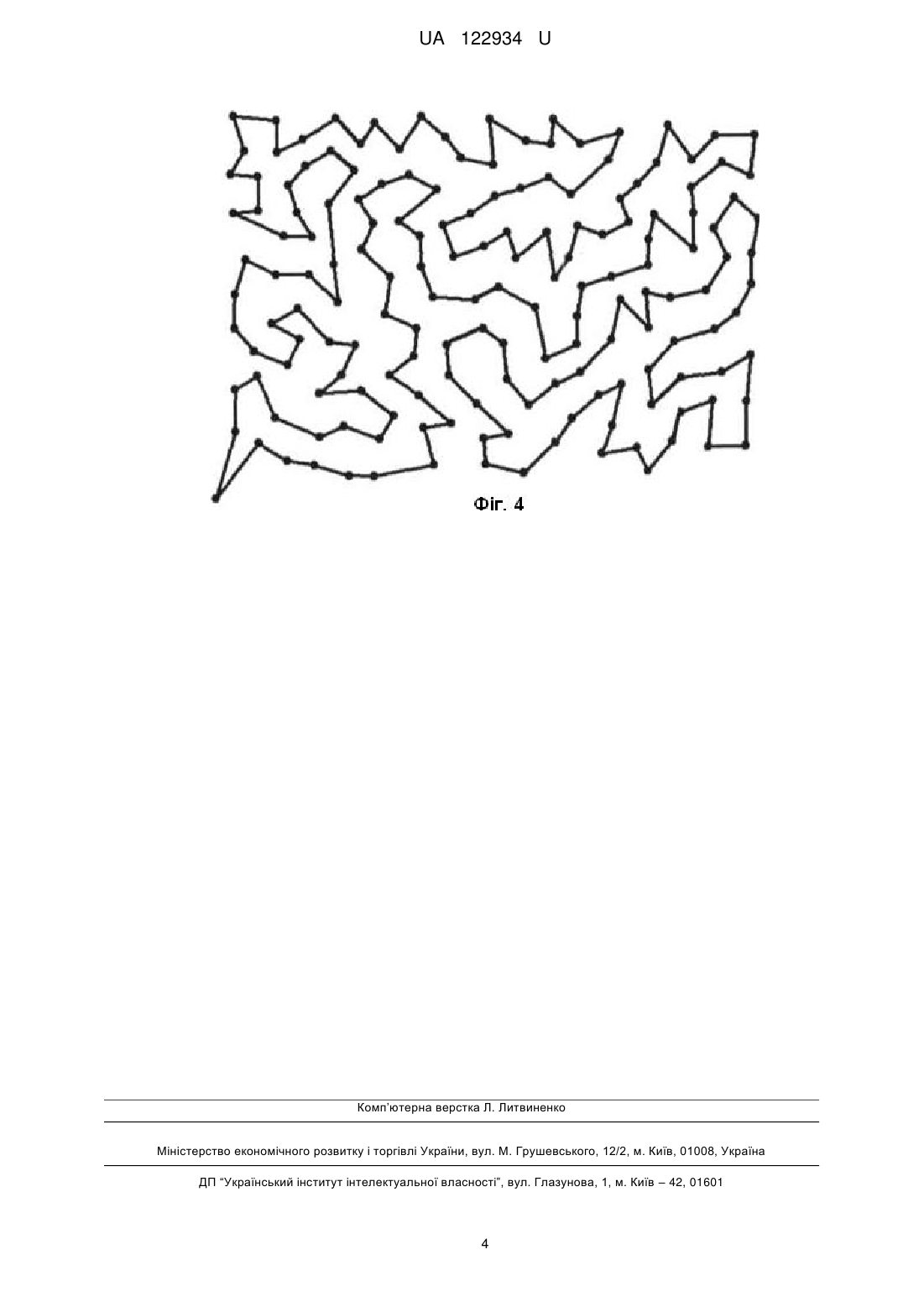
Реферат: Спосіб формування польотного завдання безпілотного літального апарата, за яким вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування, прив'язують ці координати до цифрової карти місцевості, розраховують за ними опорні точки маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор, отримують маршрут польоту апарата, маршрут закладають та зберігають в пам'яті БпЛА. Розраховують відстані між опорними точками маршруту, формують таблицю відстаней між ними, прив'язують введені координати до цифрової карти місцевості, розв'язують транспортну задачу для множини просторово розподілених координат опорних точок, перенумеровують опорні точки маршруту, змінюють порядок прольоту через опорні точки, отримують новий маршрут польоту апарата з мінімальною відстанню. UA 122934 U (12) UA 122934 U UA 122934 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до авіаційної техніки, зокрема до способів управління літальними апаратами, що має місце при забезпеченні польоту літального апарата, а саме для формування польотних завдань та визначення оптимального маршруту польоту безпілотного літального апарата (БпЛА). Найбільш близькими способом, що розглядається як аналог (прототип), є спосіб формування маршруту безпілотного літального апарата [патент України № 117211 U, МПК (2017.01) В64С 15/00, G05D 1/00, заявл. 02.12.2016, опубл. 26.06.2017], за яким вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування. Прив'язують ці координати до цифрової карти місцевості, розраховують за ними проміжні точки маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор, після прив'язування введених координат до цифрової карти місцевості, розраховують проміжні координати поміж трійками просторово розподілених координатних точок, після видачі розрахованих координат на інтегратор, в системі формування маршруту забезпечують створення маршруту. Після розрахунку проміжних точок та створення маршруту, маршрут зберігають в пам'яті безпілотного літального апарата. Для реалізації формування маршруту БпЛА недоліками є те, що: 1) не враховують вимоги до експлуатаційний затрат апарата; 2) не здійснюють автоматизацію планування польоту для великої кількості опорних точок; 3) не забезпечують оперативність планування польотного завдання та мінімізацію маршруту польоту БпЛА. В основу корисної моделі поставлена задача шляхом вирішення транспортної задачі забезпечити автоматизоване формування оптимального маршруту польоту БпЛА [V. Vorotnikov et. al., Planning the flight routes of the unmanned aerial vehicle by solving the travelling salesman problem, 2017. - Р. 44-49 //Режим доступу: https://doi.org/10.15587/2312-8372.2017.108537] з урахуванням експлуатаційних затрат апарата за мінімально можливий час з мінімальною відстанню маршруту без обмеження кількості опорних (проміжних) точок. Поставлена задача вирішується тим, що в способі планування оптимального маршруту польоту безпілотного літального апарата, за яким вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування, прив'язують ці координати до цифрової карти місцевості, розраховують за ними опорні (проміжні) точки маршруту, розраховують відстані між ними, формують таблицю відстаней між опорними (проміжними) точками маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор, після прив'язування введених координат до цифрової карти місцевості розв'язують транспортну задачу для множини просторово розподілених координатних опорних (проміжних) точок для формування маршруту польоту, отримують маршрут польоту апарата, перенумеровують опорні (проміжні) точки маршруту, розраховують відстань маршруту, маршрут закладають та зберігають в пам'яті БпЛА. Вирішення транспортної задачі для множини опорних (проміжних) для формування маршруту польоту здійснюють за допомогою алгоритму осереднених коефіцієнтів, що забезпечує врахування умов поставленої задачі, а саме: врахування експлуатаційних затрат апарата, здійснення автоматизації планування польоту для великої кількості опорних точок, забезпечення оперативності планування польотного завдання та мінімізація маршруту польоту БпЛА. Реалізація способу формування польотного завдання безпілотного літального апарата полягає у тому, що розв'язання транспортної задачі для множини опорних (проміжних) маршруту польоту здійснюють за допомогою алгоритму осереднених коефіцієнтів за мінімально можливий період часу, що забезпечує вимогу оперативності планування польотного завдання та мінімальної відстані отриманого маршруту польоту. Для n опорних (проміжних) точок початкової траєкторії польоту за (n-2) кроків здійснюється наступне: 1. Знаходять в кожному рядку та стовпці таблиці відстаней між опорними точками маршруту середнє значення рядка c i і стовпця c j , отримують для кожної комірки осереднені коефіцієнти, які розраховуються різницею елементів таблиці С і суми середніх значень рядка і стовпця, які заносять до проміжної таблиці відстаней c c ij ( c i c j ) . ij C cij 55 2. Серед знайдених осереднених коефіцієнтів проміжної таблиці відстаней визначають найменший Ui min (c i ) або Ui min c j ) , а ребро (i, j) заносять до маршруту польоту БпЛА, ( j i викреслюють i-рядок та j-стовпець з таблиці С. 1 UA 122934 U 5 10 15 20 3. Повторюють кроки 1-2 (n-2) разів. 4. Отримують таблицю С з двома рядками і стовпцями, за значеннями яких визначають кінцеву частину маршруту. Суть способу планування маршруту польоту безпілотного літального апарата при польотному завданні пояснюється за допомогою ілюстрації (фіг. 1-4), де на кресленні (фіг. 1 - 85 точок; фіг. 2 - 168 точок) показано можливі варіанти розміщення опорних (проміжних) точок та отримані відповідні маршрути польоту апарата (фіг. 3 - 85 точок, маршрут складає 4 725 од.; фіг. 4 - 168 точок, маршрут складає 7 203 од.), за аналогом відстань складає 8 731 од. Моделювання системи формування маршруту проводилося шляхом розміщення опорних (проміжних) на цифровій карті, при цьому стартова та кінцева точки маршруту польоту співпадають. Після формування початкового маршруту проводиться перенумерація опорних (проміжних) точок, розраховується відстань отриманого маршруту польоту, оцінюються можливості ресурсу БпЛА на подолання ним відстані маршруту, який закладається та зберігається в пам'яті апарата. Таким чином, порівняно з прототипом запропонований спосіб зменшує відстань маршруту польоту БпЛА на 17-35 %. Спосіб формування польотного завдання безпілотного літального апарата доцільно застосовувати для оперативної організації та проведення операцій з використанням БпЛА в умовах обмеженості часу на прийняття рішення з врахуванням енергоресурсів апарата. Корисна модель реалізована на рівні технічної пропозиції і може знайти своє широке застосування в системах управління безпілотними літальними апаратами. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Спосіб формування польотного завдання безпілотного літального апарата, за яким вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування, прив'язують ці координати до цифрової карти місцевості, розраховують за ними опорні точки маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор, отримують маршрут польоту апарата, маршрут закладають та зберігають в пам'яті БпЛА, який відрізняється тим, що розраховують відстані між опорними точками маршруту, формують таблицю відстаней між ними, прив'язують введені координати до цифрової карти місцевості, розв'язують транспортну задачу для множини просторово розподілених координат опорних точок, перенумеровують опорні точки маршруту, змінюють порядок прольоту через опорні точки, отримують новий маршрут польоту апарата з мінімальною відстанню. 2 UA 122934 U 3 UA 122934 U Комп’ютерна верстка Л. Литвиненко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 1/00, B64C 15/00
Мітки: польотного, безпілотного, апарата, формування, літального, завдання, спосіб
Код посилання
<a href="https://ua.patents.su/6-122934-sposib-formuvannya-polotnogo-zavdannya-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування польотного завдання безпілотного літального апарата</a>
Спосіб формування маршруту безпілотного літального апарата
Номер патенту: 117211
Опубліковано: 26.06.2017
Автори: Бичков Антон Миколайович, Рудаков Володимир Іванович, Твердохлібов Володимир Віталійович, Жданов Сергій Васильович, Козуб Андрій Миколайович, Станіщук Андрій Богданович, Костина Олег Миколайович, Голенківська Тетяна Ігоровна, Кучеров Дмитро Павлович
МПК: G05D 1/00, B64C 15/00
Мітки: апарата, маршруту, спосіб, безпілотного, формування, літального
Формула / Реферат:
Спосіб формування маршруту безпілотного літального апарата, при якому вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування, прив'язують ці координати до цифрової карти місцевості, розраховують за ними проміжні точки маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор, який відрізняється...
Силова установка безпілотного літального апарата
Номер патенту: 121767
Опубліковано: 11.12.2017
Автори: Мельниченко Павло Вікторович, Тичинський Костянтин Олексійович, В'юнник Артем Андрійович, Гогін Олексій Михайлович
МПК: B64D 27/24, B64C 31/028, F16F 15/04, B64C 3/00, B64C 39/02
Мітки: безпілотного, силова, літального, установка, апарата
Формула / Реферат:
1. Силова установка безпілотного літального апарата (БпЛА), яка містить електродвигун, регулятор обертів, дволопатевий ходовий гвинт, датчик режимів роботи, кок гвинта кріплення, яка відрізняється тим, що в конструкцію силової установки БпЛА введено вібропоглинаючий демпфер, несиметричні роз'єми, фланець, кільце фланця та кріпильні елементи.2. Силова установка безпілотного літального апарата (БпЛА), за п. 1, яка відрізняється...
Спосіб визначення центру мас безпілотного літального апарата
Номер патенту: 109102
Опубліковано: 10.08.2016
Автори: Шакурі Алі, Бетін Олександр Володимирович, Бетін Денис Олександрович
МПК: G01M 1/00
Мітки: визначення, спосіб, центру, літального, мас, апарата, безпілотного
Формула / Реферат:
Спосіб визначення центру мас безпілотного літального апарата, згідно з яким безпілотний літальний апарат підвішують за допомогою підйомного пристрою, який відрізняється тим, що використовують підйомний пристрій, оснащений підшипником в опорній точці, багаторазово змінюють нахил безпілотного літального апарата, використовуючи додаткові вантажі, після чого кожного разу визначають кут нахилу безпілотного літального апарата, вимірюючи висоту...
Спосіб запуску безпілотного літального апарата
Номер патенту: 115562
Опубліковано: 25.04.2017
Автори: Ватан Микола Іванович, Водчиць Олексій Григорович, Мітрахович Михайло Михайлович, Тюрін Віталій Вікторович, Комаров Володимир Олександрович, Куровська Тетяна Юріївна
МПК: F41J 9/08, B64C 13/00, B64C 15/00
Мітки: літального, запуску, безпілотного, спосіб, апарата
Формула / Реферат:
Спосіб запуску безпілотного літального апарата, при якому зазначений безпілотний літальний апарат встановлюють на платформу, що забезпечує його зліт, запускають двигун/двигуни і здійснюють зліт безпілотного літального апарата із зазначеної платформи, при цьому для зльоту безпілотний літальний апарат встановлюють на напрямну, що входить до складу платформи, а зліт виконують з напрямної або під кутом вверх відносно основи платформи, або в...
Рухомий пункт керування за допомогою безпілотного літального апарата

Номер патенту: 92602
Опубліковано: 26.08.2014
Автори: Куровська Тетяна Юріївна, Лютов Віктор Володимирович, Якобінчук Олександр Вікторович, Башкиров Олександр Миколайович, Розум Ігор Юрійович, Шишацький Андрій Володимирович
МПК: H04B 3/00, G11B 15/00
Мітки: пункт, керування, безпілотного, допомогою, рухомий, апарата, літального
Формула / Реферат:
Рухомий пункт керування за допомогою безпілотних літальних апаратів, до складу якого входить рухомий засіб, що містить робочі місця, персональну електронно-обчислювальну машину, приймач та передавач радіостанції рухомого засобу, та безпілотний літальний апарат, що містить відеокамеру, а також приймач та передавач радіостанції, при цьому робочі місця через електронно-обчислювальну машину з'єднані з передавачем радіостанції рухомого засобу,...
Попередній патент: Установка замкнутого водопостачання – (узв)-фітореактор sbr-bioplato.175
Наступний патент: Спосіб покращення екологічних показників малодинамічних водних об’єктів
Випадковий патент: Система автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна