Рухомий пункт керування за допомогою безпілотного літального апарата
Номер патенту: 92602
Опубліковано: 26.08.2014
Автори: Башкиров Олександр Миколайович, Шишацький Андрій Володимирович, Якобінчук Олександр Вікторович, Куровська Тетяна Юріївна, Лютов Віктор Володимирович, Розум Ігор Юрійович

Формула / Реферат
Рухомий пункт керування за допомогою безпілотних літальних апаратів, до складу якого входить рухомий засіб, що містить робочі місця, персональну електронно-обчислювальну машину, приймач та передавач радіостанції рухомого засобу, та безпілотний літальний апарат, що містить відеокамеру, а також приймач та передавач радіостанції, при цьому робочі місця через електронно-обчислювальну машину з'єднані з передавачем радіостанції рухомого засобу, який через канал зв'язку з'єднаний з приймачем радіостанції безпілотного літального апарата, вихід відеокамери з'єднаний з передавачем радіостанції безпілотного літального апарата, який через канал зв'язку з'єднаний з приймачем радіостанції рухомого засобу, який відрізняється тим, що до складу рухомого засобу та безпілотного літального апарата додатково введено блок керування режимами роботи радіостанції, що містить аналізатор сигналу, аналізатор змісту повідомлень, блок керування потужністю передавача, блок вибору виду модуляції, блок формування службових повідомлень, при цьому вихід приймача радіостанції рухомого засобу з'єднаний з входом аналізатора сигналу, перший вихід якого з'єднаний з входом блока формування службових повідомлень, вихід якого з'єднаний з входом передавача радіостанції рухомого засобу, другий вихід аналізатора сигналу з'єднаний з входом аналізатора змісту повідомлень, вихід якого з'єднаний з входами блока керування потужністю передавача і блока вибору виду модуляції, вихід яких з'єднаний з входом передавача радіостанції рухомого засобу, вихід аналізатора змісту повідомлень блока керування режимами роботи радіостанції рухомого засобу з'єднаний також з входом електронно-обчислювальної машини, вихід приймача радіостанції безпілотного літального апарата з'єднаний з входом аналізатора сигналу блока керування режимами роботи радіостанції, перший вихід якого з'єднаний з входом блока формування службових повідомлень, вихід якого з'єднаний з входом передавача радіостанції безпілотного літального апарата, другий вихід аналізатора сигналу з'єднаний з входом аналізатора змісту повідомлень, вихід якого з'єднаний з входами блока керування потужністю передавача і блока вибору виду модуляції, вихід яких з'єднаний з входом передавача радіостанції безпілотного літального апарата, вихід аналізатора змісту повідомлень блока керування режимами роботи радіостанції безпілотного літального апарата з'єднаний також з входом відеокамери, вихід якої з'єднаний з входом передавача безпілотного літального апарата.
Текст
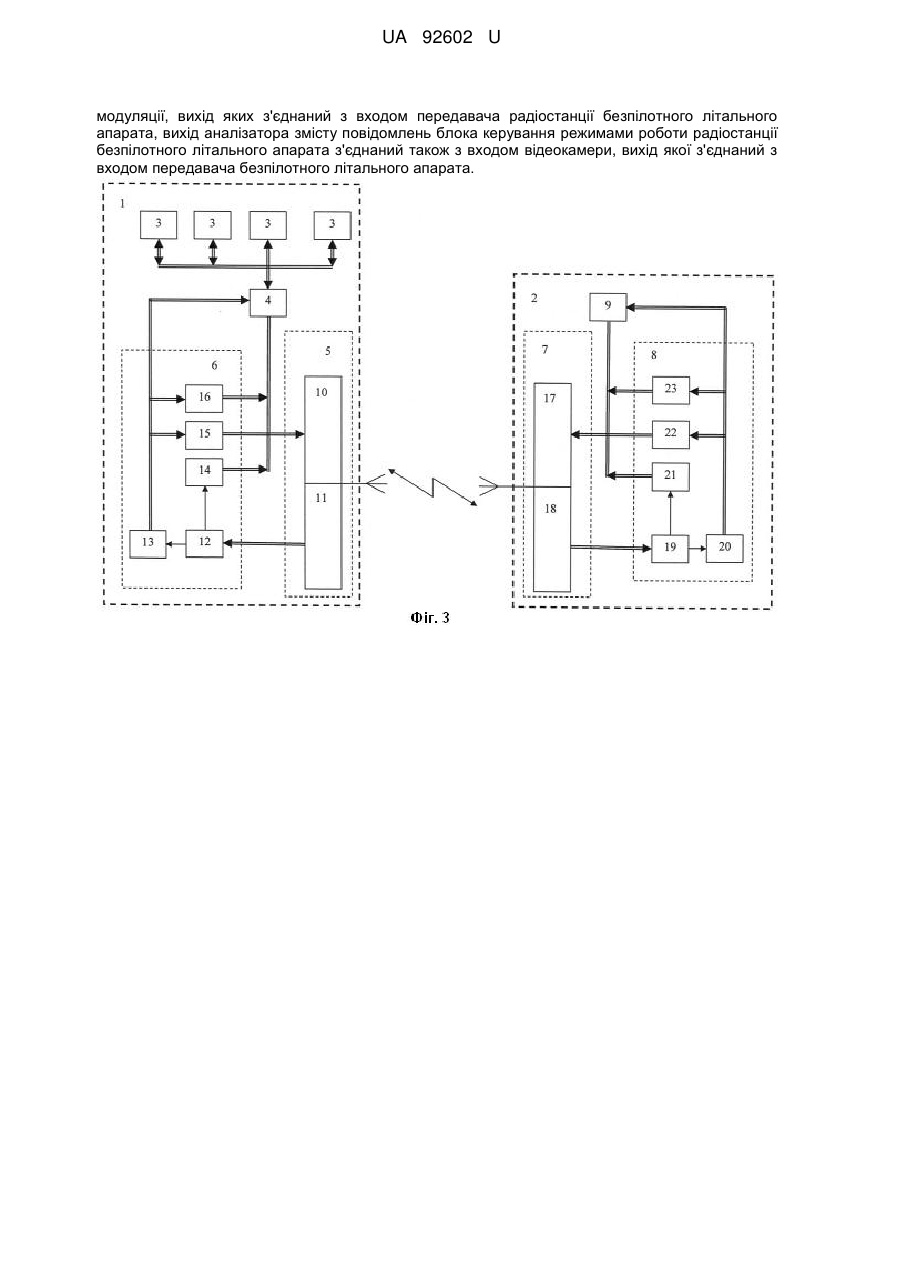
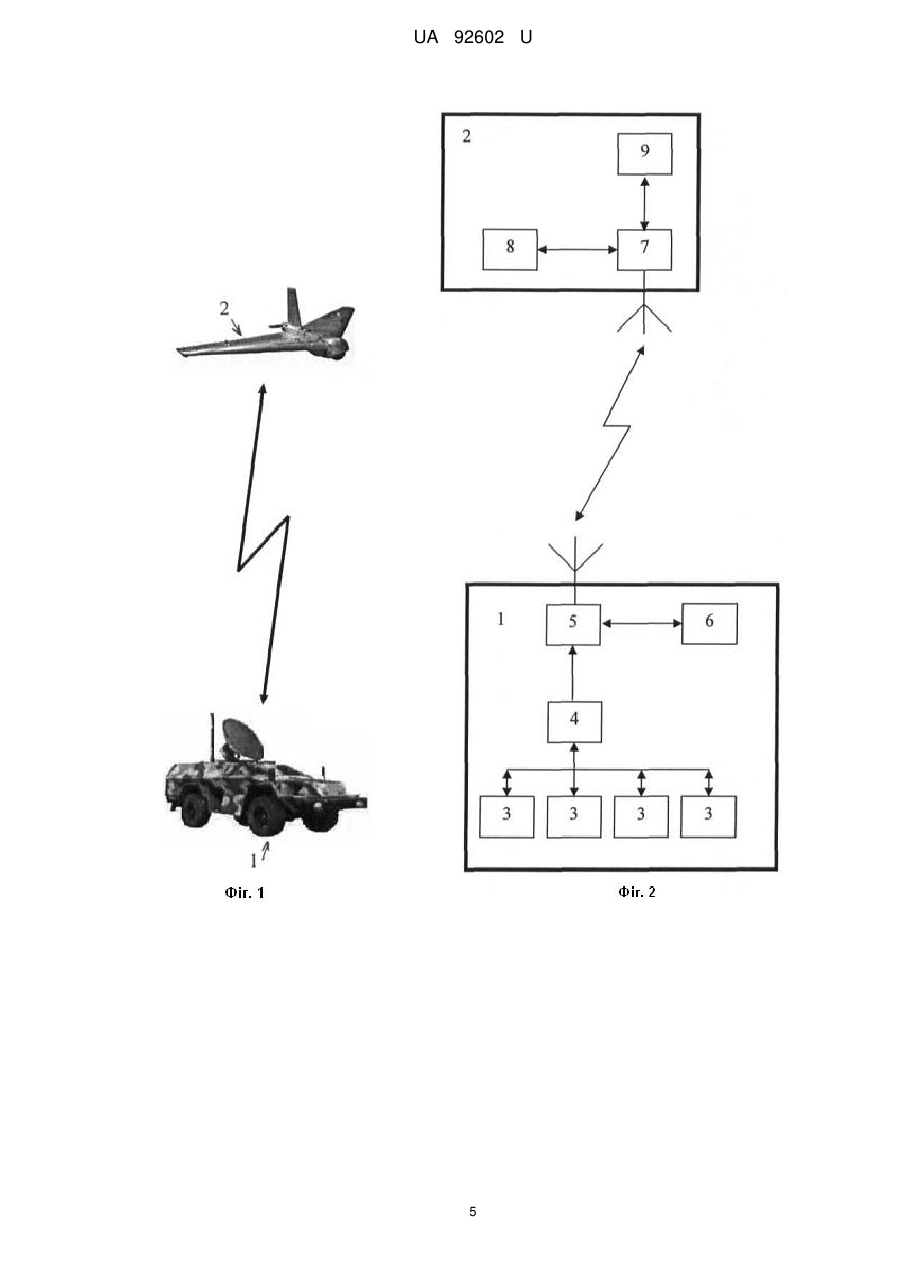
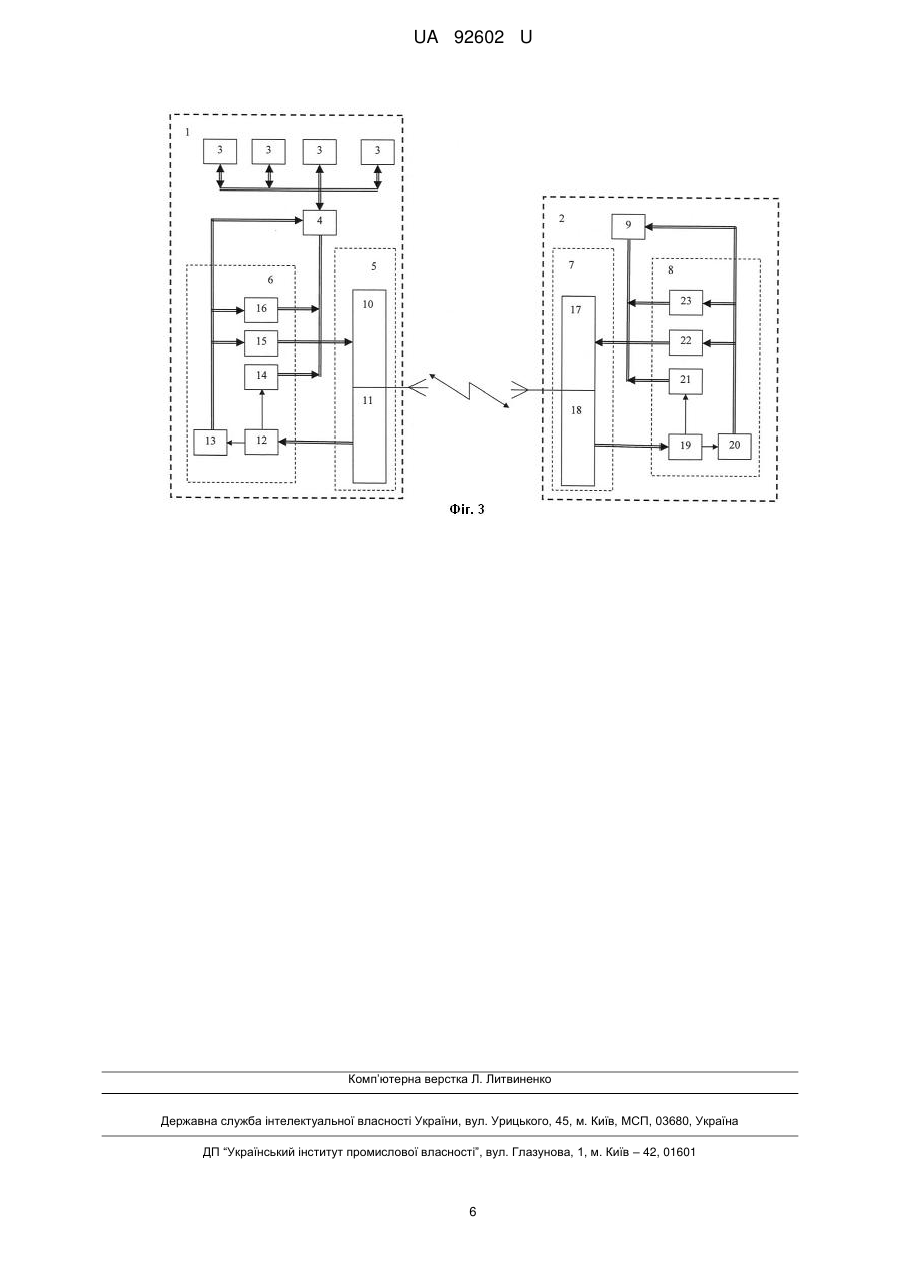
Реферат: Рухомий пункт керування за допомогою безпілотних літальних апаратів, до складу якого входить рухомий засіб, містить робочі місця, персональну електронно-обчислювальну машину, приймач та передавач радіостанції рухомого засобу, та безпілотний літальний апарат, що містить відеокамеру, а також приймач та передавач радіостанції, при цьому робочі місця через електронно-обчислювальну машину з'єднані з передавачем радіостанції рухомого засобу, який через канал зв'язку з'єднаний з приймачем радіостанції безпілотного літального апарата, вихід відеокамери з'єднаний з передавачем радіостанції безпілотного літального апарата, який через канал зв'язку з'єднаний з приймачем радіостанції рухомого засобу. До складу рухомого засобу та безпілотного літального апарата додатково введено блок керування режимами роботи радіостанції, що містить аналізатор сигналу, аналізатор змісту повідомлень, блок керування потужністю передавача, блок вибору виду модуляції, блок формування службових повідомлень, при цьому вихід приймача радіостанції рухомого засобу з'єднаний з входом аналізатора сигналу, перший вихід якого з'єднаний з входом блока формування службових повідомлень, вихід якого з'єднаний з входом передавача радіостанції рухомого засобу, другий вихід аналізатора сигналу з'єднаний з входом аналізатора змісту повідомлень, вихід якого з'єднаний з входами блока керування потужністю передавача і блока вибору виду модуляції, вихід яких з'єднаний з входом передавача радіостанції рухомого засобу, вихід аналізатора змісту повідомлень блока керування режимами роботи радіостанції рухомого засобу з'єднаний також з входом електронно-обчислювальної машини, вихід приймача радіостанції безпілотного літального апарата з'єднаний з входом аналізатора сигналу блока керування режимами роботи радіостанції, перший вихід якого з'єднаний з входом блока формування службових повідомлень, вихід якого з'єднаний з входом передавача радіостанції безпілотного літального апарата, другий вихід аналізатора сигналу з'єднаний з входом аналізатора змісту повідомлень, вихід якого з'єднаний з входами блока керування потужністю передавача і блока вибору виду UA 92602 U (12) UA 92602 U модуляції, вихід яких з'єднаний з входом передавача радіостанції безпілотного літального апарата, вихід аналізатора змісту повідомлень блока керування режимами роботи радіостанції безпілотного літального апарата з'єднаний також з входом відеокамери, вихід якої з'єднаний з входом передавача безпілотного літального апарата. UA 92602 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі зв'язку, зокрема до систем забезпечення керування із застосуванням безпілотних літальних апаратів, а саме до рухомих пунктів керування за допомогою безпілотних літальних апаратів. Для безпілотних літальних апаратів суттєвим фактором є зниження ваги джерела живлення, тому для збільшення часу польоту, який визначається часом роботи акумулятора, потрібне максимальне зниження рівня випромінюваного сигналу. Проте в умовах постійної зміни відстані між абонентами для забезпечення стійкого зв'язку протягом тривалого часу треба слідкувати, щоб рівень прийнятого сигналу не знижувався до гранично допустимого рівня і збільшувати в цьому випадку потужність сигналу, випромінюваного передавачем. У випадку, коли рівня випромінюваного сигналу для підтримання стійкого зв'язку вже недостатньо, радіостанція повинна переходити на інший вид модуляції, який забезпечить більшу дальність розпізнавання сигналу, хоча це призводить до зниження пропускної здатності радіоканалу. Відомий повітряний пункт керування, який містить літак, що містить робочі місця офіцерів оперативної групи, комутатор, телефонну і телеграфну станції, центр каналоутворення, два пристрої дистанційного керування, а також безпілотний літальний апарат з радіостанціями, при цьому робочі місця оперативної групи з'єднано з комутатором, виходи комутатора з'єднано з телефонною та телеграфною станціями, виходи яких послідовно з'єднано з центром каналоутворення, пристроями дистанційного керування, один з яких розміщений на літаку, а другий - на безпілотному літальному апараті, і радіостанціями [1]. Недоліком відомого технічного рішення є недостатні функціональні можливості тому, що, поперше, в ньому спосіб модуляції сигналу передавача змінюється оператором вручну, по-друге, пристрій не здатний контролювати якість обміну та автоматично регулювати рівень потужності випромінюваних сигналів в залежності від умов взаємодії передавача та приймача, а по-третє, безпілотний літальний апарат не містить засобів спостереження, а тому не спроможний виконувати розвідувальні функції. Найбільш близьким технічним рішенням, як за суттю, так і за задачам, що вирішуються, яке вибране за найближчий аналог (прототип), є рухомий пункт керування за допомогою безпілотних літальних апаратів, до складу якого входить рухомий засіб, що містить робочі місця, персональну електронно-обчислювальну машину, приймач та передавач радіостанції рухомого засобу, та безпілотний літальний апарат, що містить відеокамеру, а також приймач та передавач радіостанції, при цьому робочі місця через електронно-обчислювальну машину з'єднані з передавачем радіостанції рухомого засобу, який через канал зв'язку з'єднаний з приймачем радіостанції безпілотного літального апарата, вихід відеокамери з'єднаний з передавачем радіостанції безпілотного літального апарата, який через канал зв'язку з'єднаний з приймачем радіостанції рухомого засобу [2]. Недоліком відомого технічного рішення, вибраного за найближчий аналог (прототип), є недостатній час функціонування системи тому, що безпілотний літальний апарат не здатний контролювати якість обміну в каналі зв'язку і автоматично регулювати рівень потужності випромінюваних сигналів та змінювати спосіб їх модуляції в залежності від умов взаємодії передавача та приймача. В основу корисної моделі поставлена задача шляхом введення до складу пункту керування та безпілотного літального апарата додаткового обладнання, що контролює стан каналу зв'язку і автоматично регулює потужність радіостанції та вид модуляції випромінюваного сигналу, забезпечити підвищення експлуатаційних можливостей рухомого пункту керування для досягнення найбільшого терміну роботи радіостанції без додаткового зарядження і, відповідно, найдовшого часу польоту безпілотного літального апарата. Суть корисної моделі у рухомому пункті керування за допомогою безпілотного літального апарата, до складу якого входить рухомий засіб, що містить робочі місця, персональну електронно-обчислювальну машину, приймач та передавач радіостанції рухомого засобу, та безпілотний літальний апарат, що містить відеокамеру, а також приймач та передавач радіостанції, при цьому робочі місця через електронно-обчислювальну машину з'єднані з передавачем радіостанції рухомого засобу, який через канал зв'язку з'єднаний з приймачем радіостанції безпілотного літального апарата, вихід відеокамери з'єднаний з передавачем радіостанції безпілотного літального апарата, який через канал зв'язку з'єднаний з приймачем радіостанції рухомого засобу, полягає в тому, що до складу рухомого засобу та безпілотного літального апарата додатково введено блок керування режимами роботи радіостанції, що містить аналізатор сигналу, аналізатор змісту повідомлень, блок керування потужністю передавача, блок вибору виду модуляції, блок формування службових повідомлень. Суть корисної моделі полягає і в тому, що вихід приймача радіостанції рухомого засобу з'єднаний з входом аналізатора сигналу, перший вихід якого з'єднаний з входом блока формування 1 UA 92602 U 5 10 15 20 25 30 35 40 45 50 55 службових повідомлень, вихід якого з'єднаний з входом передавача радіостанції рухомого засобу, другий вихід аналізатора сигналу з'єднаний з входом аналізатора змісту повідомлень, вихід якого з'єднаний з входами блока керування потужністю передавача і блока вибору виду модуляції, вихід яких з'єднаний з входом передавача радіостанції рухомого засобу, вихід аналізатора змісту повідомлень блока керування режимами роботи радіостанції рухомого засобу з'єднаний також з входом електронно-обчислювальної машини, вихід приймача радіостанції безпілотного літального апарата з'єднаний з входом аналізатора сигналу блока керування режимами роботи радіостанції, перший вихід якого з'єднаний з входом блока формування службових повідомлень, вихід якого з'єднаний з входом передавача радіостанції безпілотного літального апарата, другий вихід аналізатора сигналу з'єднаний з входом аналізатора змісту повідомлень, вихід якого з'єднаний з входами блока керування потужністю передавача і блока вибору виду модуляції, вихід яких з'єднаний з входом передавача радіостанції безпілотного літального апарата, вихід аналізатора змісту повідомлень блока керування режимами роботи радіостанції безпілотного літального апарата з'єднаний також з входом відеокамери, вихід якої з'єднаний з входом передавача безпілотного літального апарата. Рішення технічної задачі в рухомому пункті керування за допомогою безпілотного літального апарата дійсно можливо, тому що: шляхом введення до складу рухомого засобу та безпілотного літального апарата блока керування режимами роботи радіостанції забезпечується комплексний контроль якості обміну між абонентськими радіостанціями та регулювання параметрів обміну між ними, внаслідок чого забезпечується підвищення експлуатаційних можливостей рухомого пункту керування для досягнення найбільшого терміну роботи радіостанції без додаткового зарядження і, відповідно, найдовшого часу польоту безпілотного літального апарата; шляхом введення до складу рухомого засобу та безпілотного літального апарата аналізатора сигналу забезпечується контроль стану якості сигналу, що приймається власною радіостанцією; шляхом введення до складу рухомого засобу та безпілотного літального апарата аналізатора змісту прийнятих повідомлень забезпечується аналіз якості сигналу, що приймається абонентською радіостанцією; шляхом введення до складу рухомого засобу та безпілотного літального апарата блока керування потужністю передавача забезпечується автоматичне регулювання потужності сигналу, випромінюваного власною радіостанцією, в залежності від умов взаємодії передавача та приймача; шляхом введення до складу рухомого засобу та безпілотного літального апарата блока формування службових повідомлень забезпечується генерація повідомлень про регулювання потужності сигналу та режиму роботи абонентської радіостанції; шляхом введення до складу рухомого засобу та безпілотного літального апарата блока вибору виду модуляції забезпечується вид модуляції випромінюваного сигналу, підвищення експлуатаційних можливостей рухомого пункту керування для досягнення найбільшого терміну роботи радіостанції без додаткового зарядження і, відповідно, найдовшого часу польоту безпілотного літального апарата. Таким чином, завдяки введенню до складу апаратури додаткового обладнання забезпечується аналіз стану каналу зв'язку і автоматичне регулювання потужності передавача в залежності від умов взаємодії передавача та приймача для збільшення часу польоту безпілотного літального апарата, а також збільшення дальності стійкого зв'язку завдяки вибору оптимального виду модуляції для визначеної дальності між безпілотним літальним апаратом та рухомим пунктом керування. Суть корисної моделі пояснюється за допомогою креслень, де на Фіг. 1 показано схему технічного рішення, що заявляється де на Фіг. 2 показано загальну блок-схему рухомого пункту керування за допомогою безпілотного літального апарата, який вибрано за найближчий аналог (прототип), на Фіг. 3 надано загальну блок-схему рухомого пункту керування за допомогою безпілотного літального апарата, що заявляється. Рухомий пункт керування за допомогою безпілотного літального апарата (далі - БПЛА) містить (див. Фіг. 1 та Фіг. 3) рухомий засіб 1 та БПЛА 2. Рухомий засіб 1 (див. Фіг. 2-3) містить робочі місця 3, електронно-обчислювальну машину 4, радіостанцію 5 рухомого засобу 1 та блок керування 6 режимами роботи радіостанції 5 рухомого засобу 1. БПЛА 2 містить радіостанцію 7, блок керування 8 режимами роботи радіостанції 7 та відеокамеру 9. 2 UA 92602 U 5 10 15 20 25 30 35 40 45 50 55 60 Обладнання зв'язку рухомого засобу (див. Фіг. 3) містить передавач 10 та приймач 11 радіостанції 5 рухомого засобу 1, а блок керування 6 режимами роботи радіостанції 5 містить аналізатор сигналу 12, аналізатор змісту повідомлень 13, блок формування службових повідомлень 14, блок керування потужністю 15 і блок вибору виду модуляції 16 передавача 9 рухомого засобу 1. Обладнання зв'язку БПЛА (див. Фіг. 3) містить передавач 17, приймач 18 радіостанції 7 БПЛА 2, а блок керування 8 режимами роботи радіостанції 7 містить аналізатор сигналу 19, аналізатор змісту повідомлень 20, блок формування службових повідомлень 21, блок керування потужністю 22 і блок вибору виду модуляції 23 передавача 9 БПЛА 2. Рухомий пункт керування за допомогою БПЛА (див. схему на Фіг. 1), що заявляється, функціонує таким чином. Відеокамера 9 здійснює огляд навколишньої обстановки та передає інформацію через передавач 17 радіостанції 7 БПЛА 2, через канал зв'язку, приймач 11 радіостанції 5 рухомого засобу 1 та блок керування 6 режимами роботи радіостанції на електронно-обчислювальну машину 4, де вона перетворюється на зручну для сприйняття посадовими особами форму і відображається на робочих місцях 3. В процесі роботи приймач 11 радіостанції 5 відновлює, посилює прийнятий сигнал та передає його на вхід аналізатора сигналу 12. Якщо рівень Рпр прийнятого приймачем 11 радіостанції 5 сигналу менший заздалегідь визначеної потужності Pмін або більший заздалегідь визначеної потужності Рмакс, аналізатор сигналу 12 видає команду на блок формування службових повідомлень 14 про генерацію і передачу на борт БПЛА 2 через передавач 10 відповідного повідомлення про збільшення або зменшення потужності випромінюваного сигналу. Прийняте радіостанцією 7 повідомлення приймач 18 БПЛА відновлює, посилює сигнал та передає на вхід аналізатора сигналу 19, який контролює рівень прийнятого сигналу. Якщо потужність Рпр прийнятого сигналу виходить за визначені межі Рмін
ДивитисяДодаткова інформація
Автори англійськоюBashkyrov Oleksandr Mykolaiovych
Автори російськоюБашкиров Александр Николаевич
МПК / Мітки
МПК: G11B 15/00, H04B 3/00
Мітки: безпілотного, рухомий, літального, керування, апарата, допомогою, пункт
Код посилання
<a href="https://ua.patents.su/8-92602-rukhomijj-punkt-keruvannya-za-dopomogoyu-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Рухомий пункт керування за допомогою безпілотного літального апарата</a>
Система керування безпілотного літального апарата

Номер патенту: 65814
Опубліковано: 12.12.2011
Автори: Кописов Олег Едуардович, Фірсов Сергій Миколайович, Антонєвич Ганна Олександрівна
МПК: B64C 13/00
Мітки: літального, апарата, система, керування, безпілотного
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також трьох датчиків кута та трьох датчиків кутової швидкості, виходи яких з'єднані з входами відповідно першого, п'ятого, шостого, другого, сьомого, восьмого нормуючих підсилювачів,...
Система керування безпілотного літального апарата
Номер патенту: 45231
Опубліковано: 26.10.2009
Автори: Честних Тимур Володимирович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: безпілотного, літального, апарата, система, керування
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчиків кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора,...
Система керування безпілотного літального апарата
Номер патенту: 53726
Опубліковано: 11.10.2010
Автори: Кописов Олег Едуардович, Бекетов Антон Сергійович, Кулік Анатолій Степанович, Єрмакова Вікторія Валеріївна, Фірсов Сергій Миколайович
МПК: B64C 13/00
Мітки: безпілотного, система, апарата, літального, керування
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчика кута та датчика кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, датчика напруги, вхід якого з'єднаний з другим виходом...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Величко Надія Вікторівна, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: літального, безпілотного, система, апарата, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Литвиненко Денис Володимирович, Симонов Володимир Федорович, Паніна Алла Володимирівна
МПК: G05D 1/03
Мітки: літального, безпілотного, система, стабілізації, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Попередній патент: Спосіб оцінювання функціонального стану статичної рівноваги
Наступний патент: Пристрій для контролю часу роботи об’єкта
Випадковий патент: Спосіб виділення радіоактивних і рідкісноземельних елементів з відходів флотаційного збагачення, гравітації та видобутку вугілля і мінеральних руд