Спосіб формування маршруту безпілотного літального апарата
Номер патенту: 117211
Опубліковано: 26.06.2017
Автори: Козуб Андрій Миколайович, Жданов Сергій Васильович, Кучеров Дмитро Павлович, Твердохлібов Володимир Віталійович, Бичков Антон Миколайович, Рудаков Володимир Іванович, Голенківська Тетяна Ігоровна, Станіщук Андрій Богданович, Костина Олег Миколайович


Формула / Реферат
Спосіб формування маршруту безпілотного літального апарата, при якому вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування, прив'язують ці координати до цифрової карти місцевості, розраховують за ними проміжні точки маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор, який відрізняється тим, що після прив'язування введених координат до цифрової карти місцевості, розраховують проміжні координати поміж трійками просторово розподілених координатних точок, після видачі розрахованих координат на інтегратор, в системі формування маршруту забезпечують створення маршруту, а після розрахунку проміжних точок та створення маршруту, маршрут зберігають в пам'яті безпілотного літального апарата.
Текст
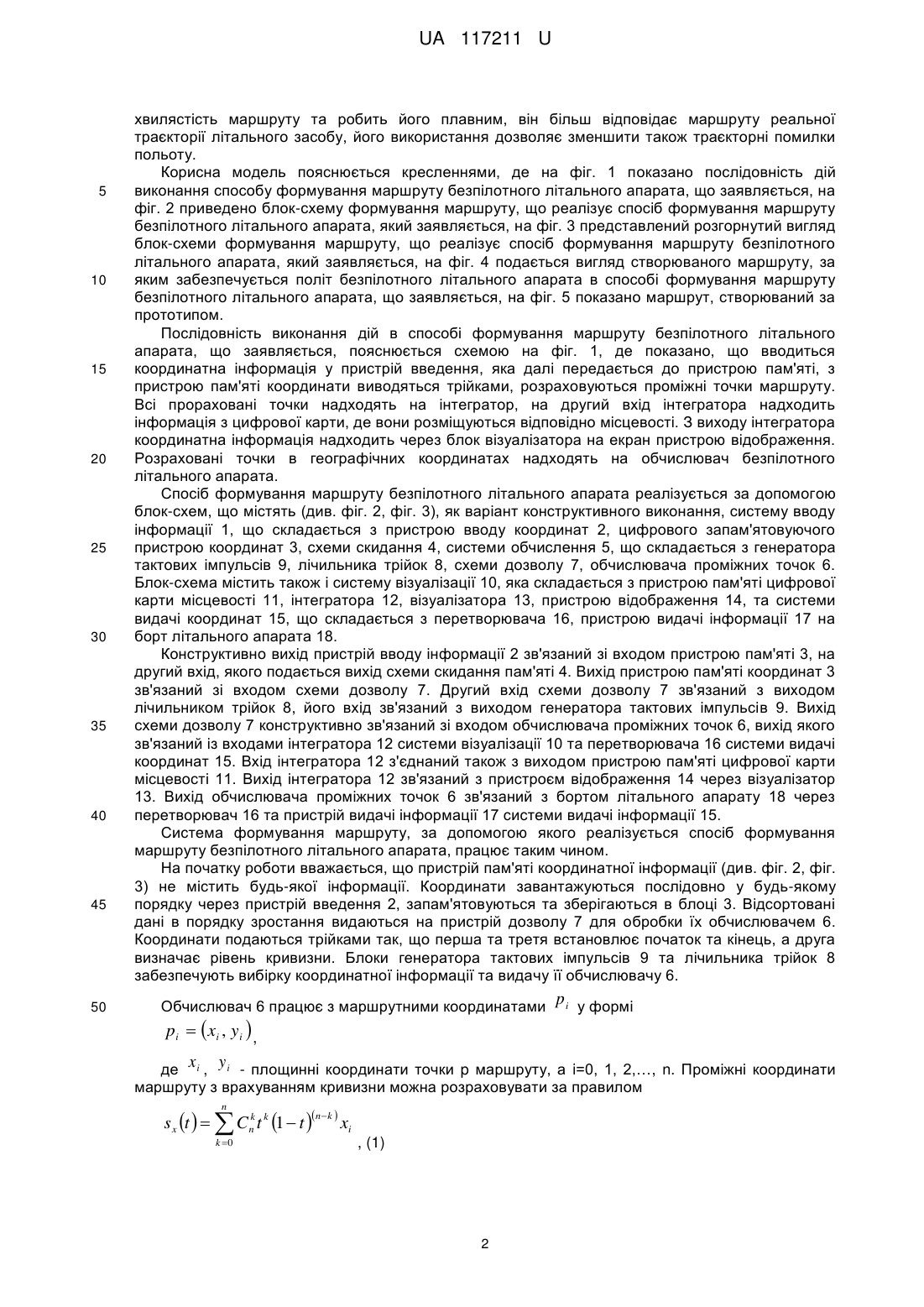
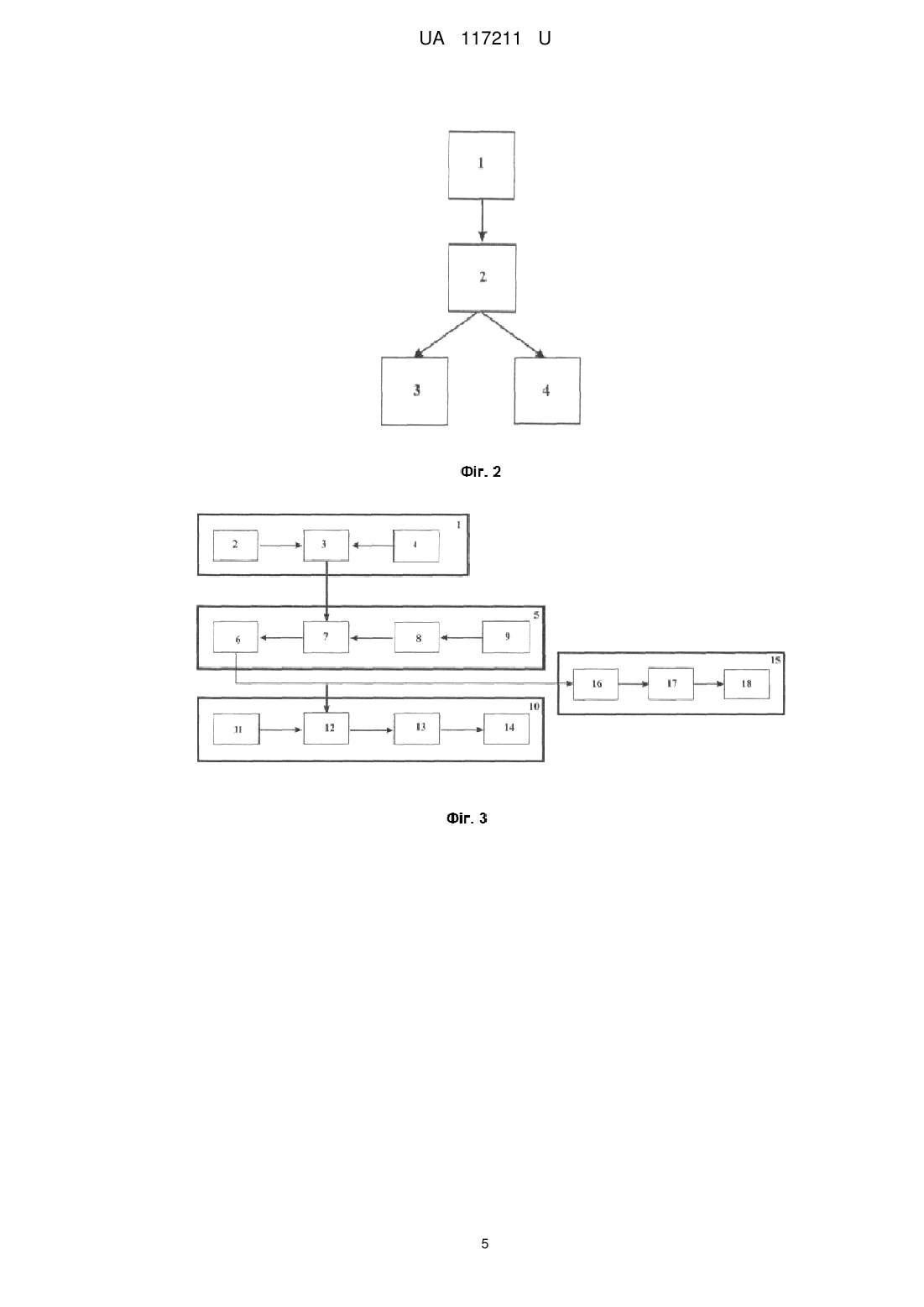
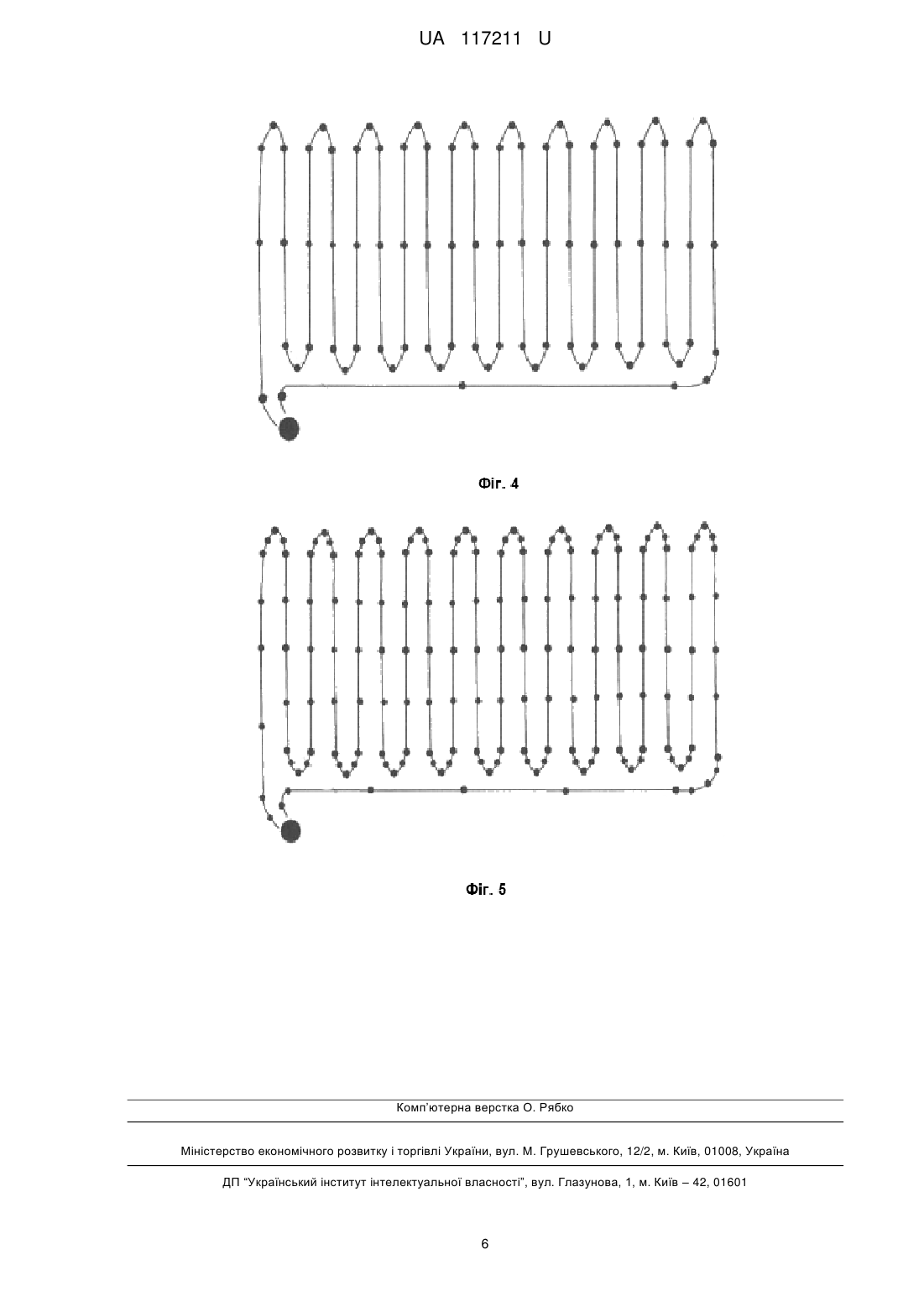
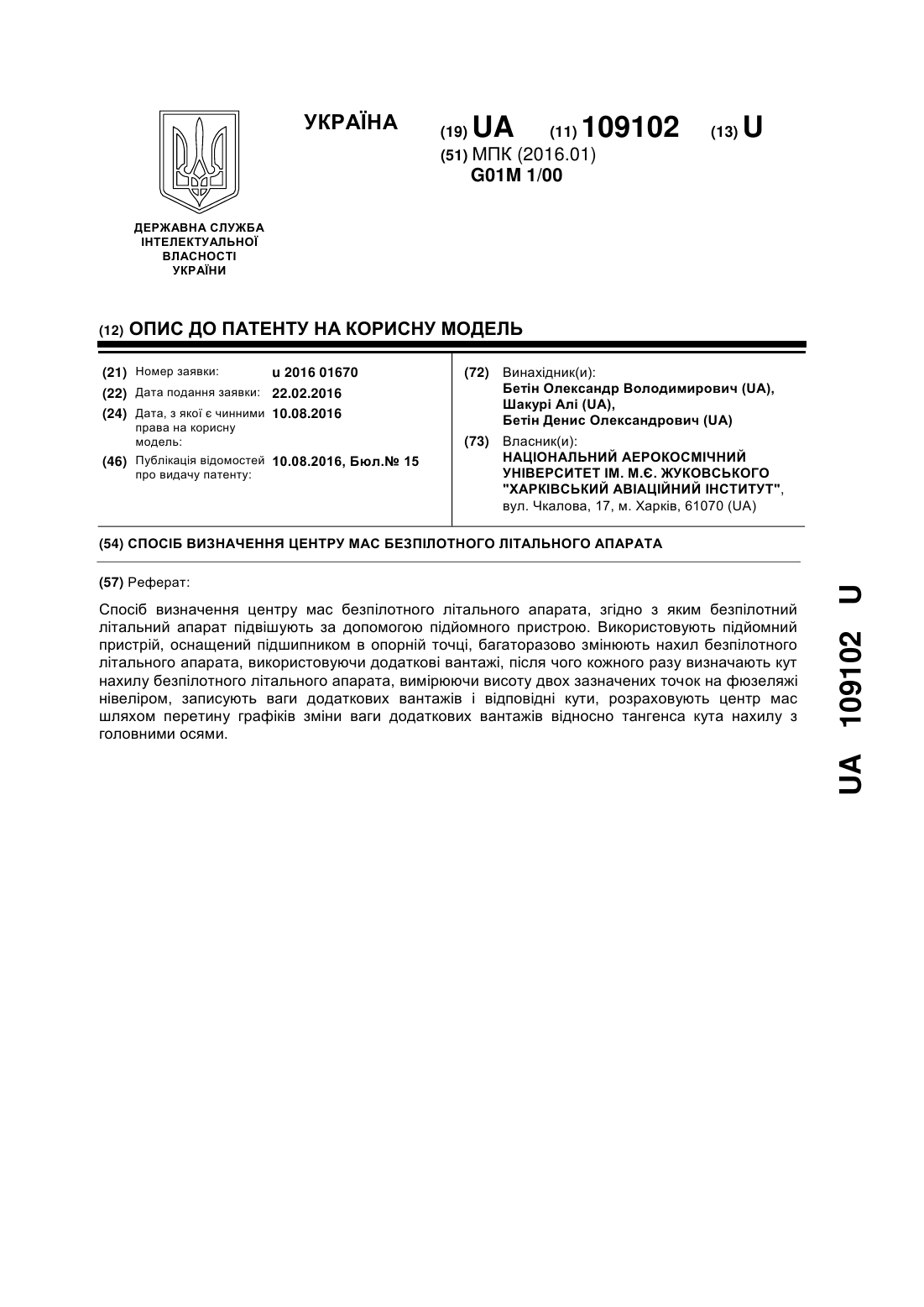
Реферат: Спосіб формування маршруту безпілотного літального апарата, при якому вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування. Прив'язують ці координати до цифрової карти місцевості, розраховують за ними проміжні точки маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор. Після прив'язування введених координат до цифрової карти місцевості, розраховують проміжні координати поміж трійками просторово розподілених координатних точок, після видачі розрахованих координат на інтегратор, в системі формування маршруту забезпечують створення маршруту. Після розрахунку проміжних точок та створення маршруту, маршрут зберігають в пам'яті безпілотного літального апарата. UA 117211 U (12) UA 117211 U UA 117211 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі авіації, зокрема до способів управління технічними об'єктами, а саме до способів управління літальними апаратами, що має місце при забезпеченні польоту літального апарата, насамперед при формуванні польотного завдання та визначенні маршруту польоту повітряного об'єкта. Особливістю системи забезпечення польоту є формування вхідної інформації для системи керування літаком - набором точок, які утворюють маршрут польоту. Введення маршрутних точок здійснюється у всесвітній геодезичній системі координат WGS84. Маршрут повинен забезпечувати з повернення апарата та при цьому мати мінімальну довжину, тому він не є прямолінійним. Складний маршрут, наприклад "змійка", вимагає великої кількості координатних точок, тобто знання тільки географічних координат старту та кінця маршруту не є достатнім. Множинність набору множинних точок за рахунок вибору радіуса розвороту примушує оператора вибирати оптимальний маршрут серед наявних. Таким чином, це може бути тривалою за часом процедурою. Вибір маршруту літального засобу пов'язаний також з необхідністю врахування умов поставленого завдання, а саме: виконання маршруту в реальному масштабі часу, наявність апаратних обмежень (пам'ять, обчислювальні ресурси, засоби інформаційного забезпечення), точність інформації, що вводиться, оцінювання довжини шляху та його вартості, особливістю введення даних, необхідності запам'ятовування повного маршруту та ін. Відомим аналогом є спосіб формування маршруту безпілотних літальних засобів, який полягає у побудові маршруту, подається точками центру, значеннями радіусів пари арочних кривих та координатами точок лінійної ділянки з'єднаних між собою (криві Дубінса) [1]. До недоліків відомого способу формування маршруту безпілотних літальних засобів належать витрати часу на пошук та оптимізацію координатної інформації. Найближчим аналогом до корисної моделі є спосіб формування маршруту безпілотного літального апарата, при якому вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування, прив'язують ці координати до цифрової карти місцевості, розраховують за ними проміжні точки маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор [2]. Недоліком найближчого аналога є хвильовий характер розрахованої кривої маршруту, що з'єднує сусідні точки. Необхідність зменшення хвилястості побудованої кривої вимагає збільшення ручного введення додаткової кількості точок для розрахунку. Такий підхід приводить до збільшення часових витрат на ручне введення та розрахунок маршруту внаслідок складності обчислювального алгоритму маршруту. В основу корисної моделі поставлена задача шляхом введення розрахунку за трійками проміжних координатних точок, забезпечити формування необхідного маршруту безпілотного літального апарата за менший час. Поставлена задача вирішується тим, що спосіб формування маршруту безпілотного літального апарата, при якому вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування, прив'язують ці координати до цифрової карти місцевості, розраховують за ними проміжні точки маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор, згідно з корисною моделлю, після прив'язування введених координат до цифрової карти місцевості, розраховують проміжні координати поміж трійками просторово розподілених координатних точок, після видачі розрахованих координат на інтегратор, в системі формування маршруту забезпечують створення маршруту, а після розрахунку проміжних точок та створення маршруту, маршрут зберігають в пам'яті безпілотного літального апарата. Порівняльний аналіз корисної моделі та найближчого аналога дозволяє дійти висновку, що спосіб формування маршруту безпілотного літального апарата відрізняється тим, що після прив'язування введених координат до цифрової карти місцевості, розраховують проміжні координати поміж трійками просторово розподілених координатних точок, після видачі розрахованих координат на інтегратор, в системі формування маршруту забезпечують створення маршруту, а після розрахунку проміжних точок та створення маршруту, маршрут зберігають в пам'яті безпілотного літального апарата. Можливість здійснення способу формування маршруту безпілотного літального апарата дійсно можливе тому, що алгоритм розрахунку координатної інформації за трійками чисел є значно економніший ніж алгоритм розрахунку за великою кількістю маршрутних точок. Алгоритм розрахунку реалізований у обчислювачі проміжних точок в межах трійок дозволяє виключити 1 UA 117211 U 5 10 15 20 25 30 35 40 45 50 хвилястість маршруту та робить його плавним, він більш відповідає маршруту реальної траєкторії літального засобу, його використання дозволяє зменшити також траєкторні помилки польоту. Корисна модель пояснюється кресленнями, де на фіг. 1 показано послідовність дій виконання способу формування маршруту безпілотного літального апарата, що заявляється, на фіг. 2 приведено блок-схему формування маршруту, що реалізує спосіб формування маршруту безпілотного літального апарата, який заявляється, на фіг. 3 представлений розгорнутий вигляд блок-схеми формування маршруту, що реалізує спосіб формування маршруту безпілотного літального апарата, який заявляється, на фіг. 4 подається вигляд створюваного маршруту, за яким забезпечується політ безпілотного літального апарата в способі формування маршруту безпілотного літального апарата, що заявляється, на фіг. 5 показано маршрут, створюваний за прототипом. Послідовність виконання дій в способі формування маршруту безпілотного літального апарата, що заявляється, пояснюється схемою на фіг. 1, де показано, що вводиться координатна інформація у пристрій введення, яка далі передається до пристрою пам'яті, з пристрою пам'яті координати виводяться трійками, розраховуються проміжні точки маршруту. Всі прораховані точки надходять на інтегратор, на другий вхід інтегратора надходить інформація з цифрової карти, де вони розміщуються відповідно місцевості. З виходу інтегратора координатна інформація надходить через блок візуалізатора на екран пристрою відображення. Розраховані точки в географічних координатах надходять на обчислювач безпілотного літального апарата. Спосіб формування маршруту безпілотного літального апарата реалізується за допомогою блок-схем, що містять (див. фіг. 2, фіг. 3), як варіант конструктивного виконання, систему вводу інформації 1, що складається з пристрою вводу координат 2, цифрового запам'ятовуючого пристрою координат 3, схеми скидання 4, системи обчислення 5, що складається з генератора тактових імпульсів 9, лічильника трійок 8, схеми дозволу 7, обчислювача проміжних точок 6. Блок-схема містить також і систему візуалізації 10, яка складається з пристрою пам'яті цифрової карти місцевості 11, інтегратора 12, візуалізатора 13, пристрою відображення 14, та системи видачі координат 15, що складається з перетворювача 16, пристрою видачі інформації 17 на борт літального апарата 18. Конструктивно вихід пристрій вводу інформації 2 зв'язаний зі входом пристрою пам'яті 3, на другий вхід, якого подається вихід схеми скидання пам'яті 4. Вихід пристрою пам'яті координат 3 зв'язаний зі входом схеми дозволу 7. Другий вхід схеми дозволу 7 зв'язаний з виходом лічильником трійок 8, його вхід зв'язаний з виходом генератора тактових імпульсів 9. Вихід схеми дозволу 7 конструктивно зв'язаний зі входом обчислювача проміжних точок 6, вихід якого зв'язаний із входами інтегратора 12 системи візуалізації 10 та перетворювача 16 системи видачі координат 15. Вхід інтегратора 12 з'єднаний також з виходом пристрою пам'яті цифрової карти місцевості 11. Вихід інтегратора 12 зв'язаний з пристроєм відображення 14 через візуалізатор 13. Вихід обчислювача проміжних точок 6 зв'язаний з бортом літального апарату 18 через перетворювач 16 та пристрій видачі інформації 17 системи видачі інформації 15. Система формування маршруту, за допомогою якого реалізується спосіб формування маршруту безпілотного літального апарата, працює таким чином. На початку роботи вважається, що пристрій пам'яті координатної інформації (див. фіг. 2, фіг. 3) не містить будь-якої інформації. Координати завантажуються послідовно у будь-якому порядку через пристрій введення 2, запам'ятовуються та зберігаються в блоці 3. Відсортовані дані в порядку зростання видаються на пристрій дозволу 7 для обробки їх обчислювачем 6. Координати подаються трійками так, що перша та третя встановлює початок та кінець, а друга визначає рівень кривизни. Блоки генератора тактових імпульсів 9 та лічильника трійок 8 забезпечують вибірку координатної інформації та видачу її обчислювачу 6. Обчислювач 6 працює з маршрутними координатами p i у формі p i xi , y i , де x i , y i - площинні координати точки p маршруту, а i=0, 1, 2,…, n. Проміжні координати маршруту з врахуванням кривизни можна розраховувати за правилом n k s x t Cn t k 1 t k 0 nk xi , (1) 2 UA 117211 U n k s y t Cn t k 1 t В 1 t i Cn nk k 0 yi - параметр, t 0,1 та n! i! n i ! . (2) Вираз (1) припускає групування у вигляді 5 st 1 t Q1 tQ2 , (3) де Qi 1 1 t Ri 1 tRi , Ri 1 t pi 1 tpi , (4) 10 15 Інтеграція проміжних координат з цифровою картою відбувається шляхом фіксації всіх точок розрахованого маршруту на цифровій географічній карті та їх перетворенні у географічні координати. Підвищення ефективності способу безпілотного літального апарату, що заявляється, можна побачити шляхом проведення порівняння кількості маршрутних точок, які вводять на початку створення маршруту. У способі, що заявляється, відсутня необхідність запам'ятовування проміжних розрахункових точок, можливість організації розрахунків у реальному масштабі часу, побудована крива на пристрої відображення є плавною кривою, яка досягається відсутністю кутів у маршруті. Якщо загальна чисельність математичних операцій, які виконуються за формулою (1), n дорівнюється 6k k 1 , то алгоритм, заснований на формулі (3) за наявності можливості i 20 25 30 35 зберігання масивів t , 1 t і коефіцієнтів C n потребує k k 5 обчислювальних операцій. Моделювання системи формування маршруту проводилося шляхом введення координат маршруту. За результатами вимірів, отримано 85 точки для маршруту змійка (фіг. 4), що включає окрім стартової та кінцевої точок польоту розворот на ділянку посадки. Звичайний спосіб створення маршруту вимагає вводу 168 точок (фіг. 5). Виграш складає приблизно 2 рази. Підвищення ефективності застосування способу формування маршруту безпілотного літального апарату, який заявляється, у порівнянні з прототипом, полягає в тому, що шляхом розрахунку за трійками просторово рознесених точок, забезпечується можливість зменшення кількості точок вводу маршруту, зменшення часу на введення інформації, а також можливість підвищити плавність сформованого маршруту. Джерело інформації: 1. Bortoff S.A. Path Planning for UAVs /Bortoff S.A. //Proceedings of the American Control Conference, June 2000, Chicago, Illinois, p. 364-368. - аналог. 2. Кучеров Д.П. Планирование маршрута БПЛА /Д.П. Кучеров, A.M. Козуб //Вісник Східноукраїнського національного університету імені Володимира Даля. - № 5 (194). - 2013. – С. 189-192. - прототип. m i i ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Спосіб формування маршруту безпілотного літального апарата, при якому вводять в систему формування маршруту координатну інформацію через пристрій введення інформації, записують її у пам'ять пристрою формування, прив'язують ці координати до цифрової карти місцевості, розраховують за ними проміжні точки маршруту, видають проміжні точки маршруту на інтегратор та виводять їх на екран пристрою відображення через візуалізатор, який відрізняється тим, що після прив'язування введених координат до цифрової карти місцевості, розраховують проміжні координати поміж трійками просторово розподілених координатних точок, після видачі розрахованих координат на інтегратор, в системі формування маршруту забезпечують створення маршруту, а після розрахунку проміжних точок та створення маршруту, маршрут зберігають в пам'яті безпілотного літального апарата. 3 UA 117211 U 4 UA 117211 U 5 UA 117211 U Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 1/00, B64C 15/00
Мітки: літального, апарата, маршруту, безпілотного, спосіб, формування
Код посилання
<a href="https://ua.patents.su/8-117211-sposib-formuvannya-marshrutu-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування маршруту безпілотного літального апарата</a>
Спосіб визначення центру мас безпілотного літального апарата
Номер патенту: 109102
Опубліковано: 10.08.2016
Автори: Шакурі Алі, Бетін Денис Олександрович, Бетін Олександр Володимирович
МПК: G01M 1/00
Мітки: спосіб, літального, безпілотного, мас, визначення, апарата, центру
Формула / Реферат:
Спосіб визначення центру мас безпілотного літального апарата, згідно з яким безпілотний літальний апарат підвішують за допомогою підйомного пристрою, який відрізняється тим, що використовують підйомний пристрій, оснащений підшипником в опорній точці, багаторазово змінюють нахил безпілотного літального апарата, використовуючи додаткові вантажі, після чого кожного разу визначають кут нахилу безпілотного літального апарата, вимірюючи висоту...
Система орієнтації малогабаритного безпілотного літального апарата
Номер патенту: 102894
Опубліковано: 25.11.2015
Автори: Будіба Уіссам, Жежера Іван Володимирович, Фірсов Сергій Миколайович
МПК: G01C 23/00
Мітки: літального, орієнтації, малогабаритного, безпілотного, апарата, система
Формула / Реферат:
Система орієнтації малогабаритного безпілотного літального апарата, яка містить блок датчиків прискорень, вихід якого з'єднаний з першим входом блока пристрою для обробки та виведення просторової інформації, блок супутникової навігації, вихід якого з'єднаний з другим входом блока пристрою для обробки та виведення просторової інформації, блока живлення, вихід якого з'єднаний з третім входом блока пристрою для обробки та виведення просторової...
Спосіб ведення повітряної розвідки за допомогою безпілотного літального апарата
Номер патенту: 31235
Опубліковано: 25.03.2008
Автори: Андрійченко Олег Станіславович, Василенко Олександр Васильович, Куровська Тетяна Юріївна, Машталір Вадим Віталійович, Комаров Володимир Олександрович, Сендецький Микола Миколайович, Анпьонов Валентин Вадимович, Васюхина Валентина Олексіївна, Чучмій Андрій Володимирович, Слободенюк Сергій Йосипович, Яйчук Микола Семенович, Лапицький Сергій Володимирович, Гордієвський Олексій Тихонович, Бондарчук Сергій Вікторович, Жованик Борис Євгенович
МПК: B64C 31/00, H04B 7/185
Мітки: літального, безпілотного, повітряної, ведення, спосіб, апарата, допомогою, розвідки
Формула / Реферат:
Спосіб ведення повітряної розвідки за допомогою безпілотного літального апарата, при якому підготовляють безпілотний літальний апарат, що містить вбудоване навігаційне устаткування та систему GPS, підготовляють розвідувальне устаткування і розгортають пункт прийому розвідувальної інформації, встановлюють розвідувальне устаткування на безпілотний літальний апарат, проводять зліт безпілотного літального апарата із установленим на ньому...
Триопорне шасі безпілотного літального апарата
Номер патенту: 86554
Опубліковано: 10.01.2014
Автори: Смирнов Ігор Дмитрович, Макарчук Максим Віталійович, Матійчик Михайло Петрович, Франчук Роман Миколайлович
МПК: B64C 25/00
Мітки: шасі, безпілотного, триопорне, літального, апарата
Формула / Реферат:
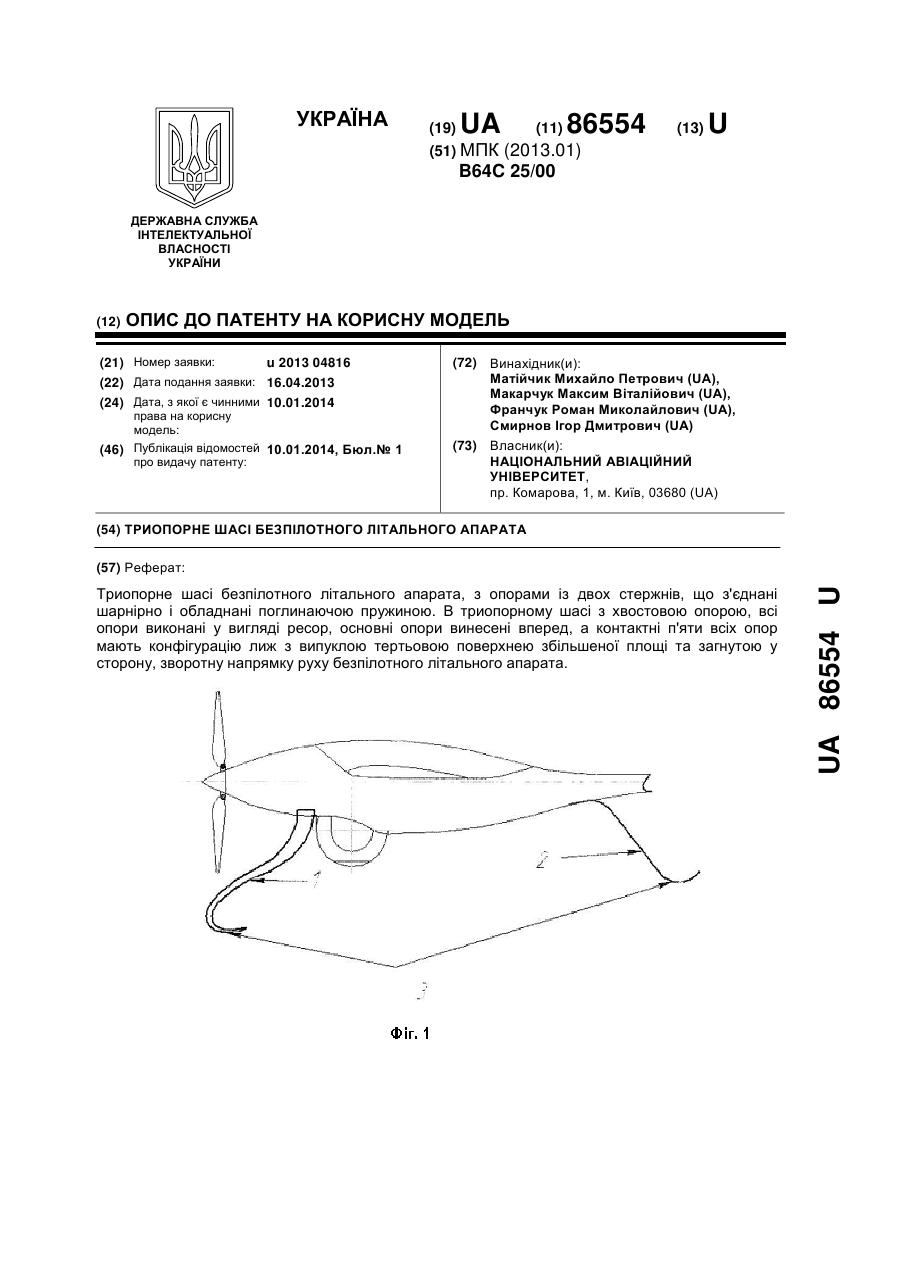
1. Триопорне шасі безпілотного літального апарата, з опорами із двох стержнів, що з'єднані шарнірно і обладнані поглинаючою пружиною, яке відрізняється тим, що у триопорному шасі з хвостовою опорою, всі опори виконані у вигляді ресор, основні опори винесені вперед, а контактні п'яти всіх опор мають конфігурацію лиж з випуклою тертьовою поверхнею збільшеної площі та загнутою у сторону, зворотну напрямку руху безпілотного літального...
Спосіб запуску безпілотного літального апарата
Номер патенту: 115562
Опубліковано: 25.04.2017
Автори: Ватан Микола Іванович, Тюрін Віталій Вікторович, Комаров Володимир Олександрович, Куровська Тетяна Юріївна, Мітрахович Михайло Михайлович, Водчиць Олексій Григорович
МПК: B64C 13/00, F41J 9/08, B64C 15/00
Мітки: літального, апарата, безпілотного, запуску, спосіб
Формула / Реферат:
Спосіб запуску безпілотного літального апарата, при якому зазначений безпілотний літальний апарат встановлюють на платформу, що забезпечує його зліт, запускають двигун/двигуни і здійснюють зліт безпілотного літального апарата із зазначеної платформи, при цьому для зльоту безпілотний літальний апарат встановлюють на напрямну, що входить до складу платформи, а зліт виконують з напрямної або під кутом вверх відносно основи платформи, або в...
Попередній патент: Спосіб неінвазивного визначення дози ультрафіолетового опромінення концентрату лейкоцитів
Наступний патент: Спосіб діагностики розвитку атеросклерозу
Випадковий патент: Процес повернення супутньо-пластових вод в надра