Система стабілізації і орієнтації космічного апарата
Номер патенту: 123039
Опубліковано: 12.02.2018
Автори: Джулгаков Віталій Георгійович, Басова Анна Євгенівна, Субота Анатолій Максимович
Формула / Реферат
Система стабілізації і орієнтації космічного апарата, що містить порівняльний елемент, датчик кута 18, вхід якого з'єднаний з першим виходом об'єкта керування, датчик кутової швидкості, вхід якого з'єднаний з другим виходом об'єкта керування, вхід якого з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом першого двигуна-маховика, а другий вхід з'єднаний з виходом другого двигуна-маховика, вхід якого з'єднаний з виходом транспортної затримки, підсилювач потужності, вихід порівняльного елемента з'єднаний з першим входом мультиплексора, другий вхід якого з'єднаний з датчиком кутової швидкості, а вихід мультиплексора з'єднаний з входом нечіткого регулятора, вихід якого приєднаний до підсилювача потужності, яка відрізняється тим, що перший вхід порівняльного елемента з'єднаний з виходом блока управління, вхід якого з'єднаний з блоком програм управління, а перший вихід якого з'єднаний з першим входом першого ключа, другий вихід з'єднаний з першим входом другого ключа, четвертий вихід з'єднаний з першим входом третього ключа, п'ятий вихід з'єднаний з першим входом четвертого ключа, другі входи першого, другого, третього та четвертого ключів з'єднані з виходом підсилювача потужності, вихід першого ключа з'єднаний з входом першого двигуна-маховика, вихід другого ключа через першу транспортну затримку також з'єднаний з входом першого двигуна-маховика, вихід третього ключа з'єднаний з входом-другого двигуна-маховика, вихід четвертого ключа через другу транспортну затримку з'єднаний також зі входом другого двигуна-маховика.
Текст
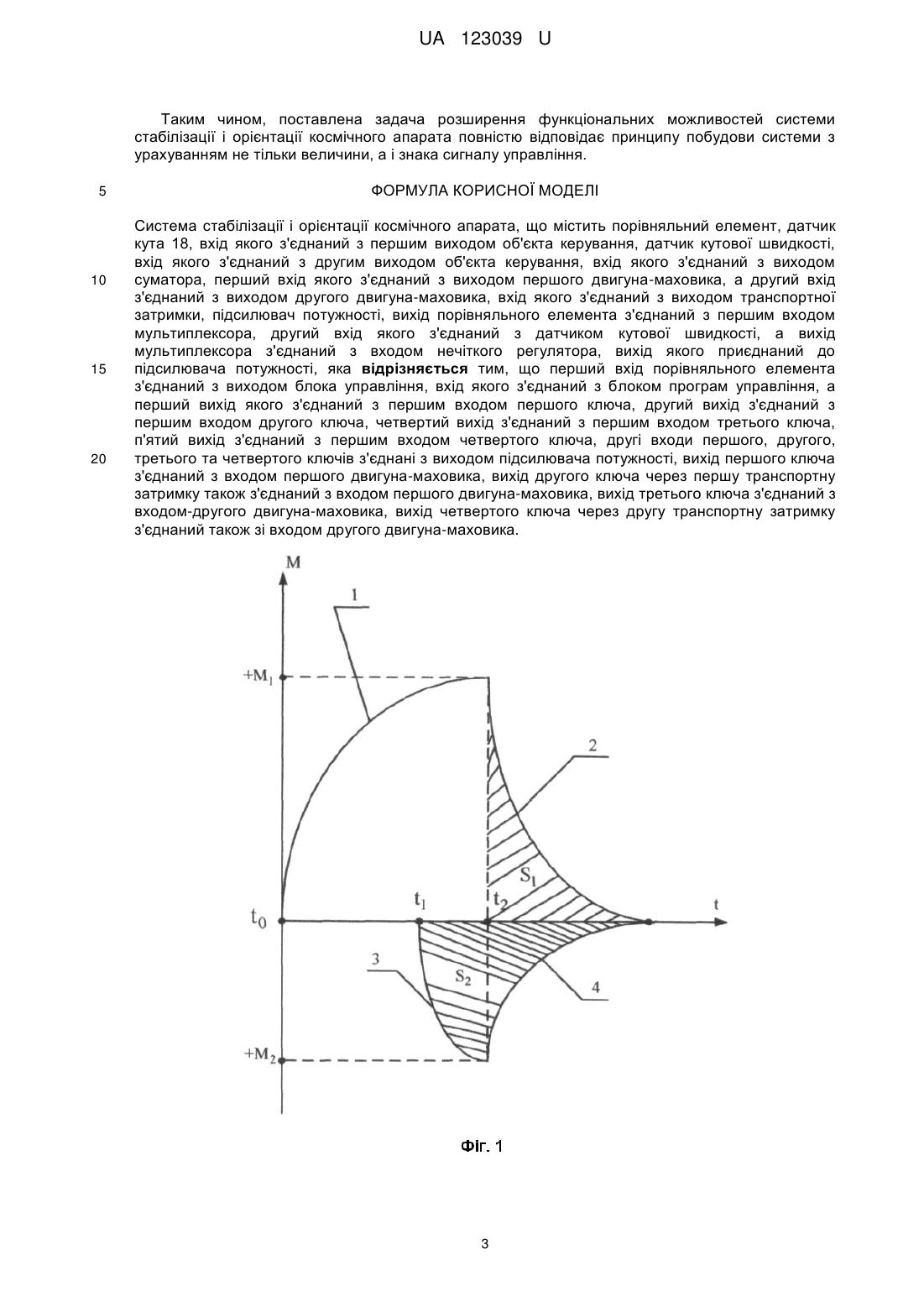
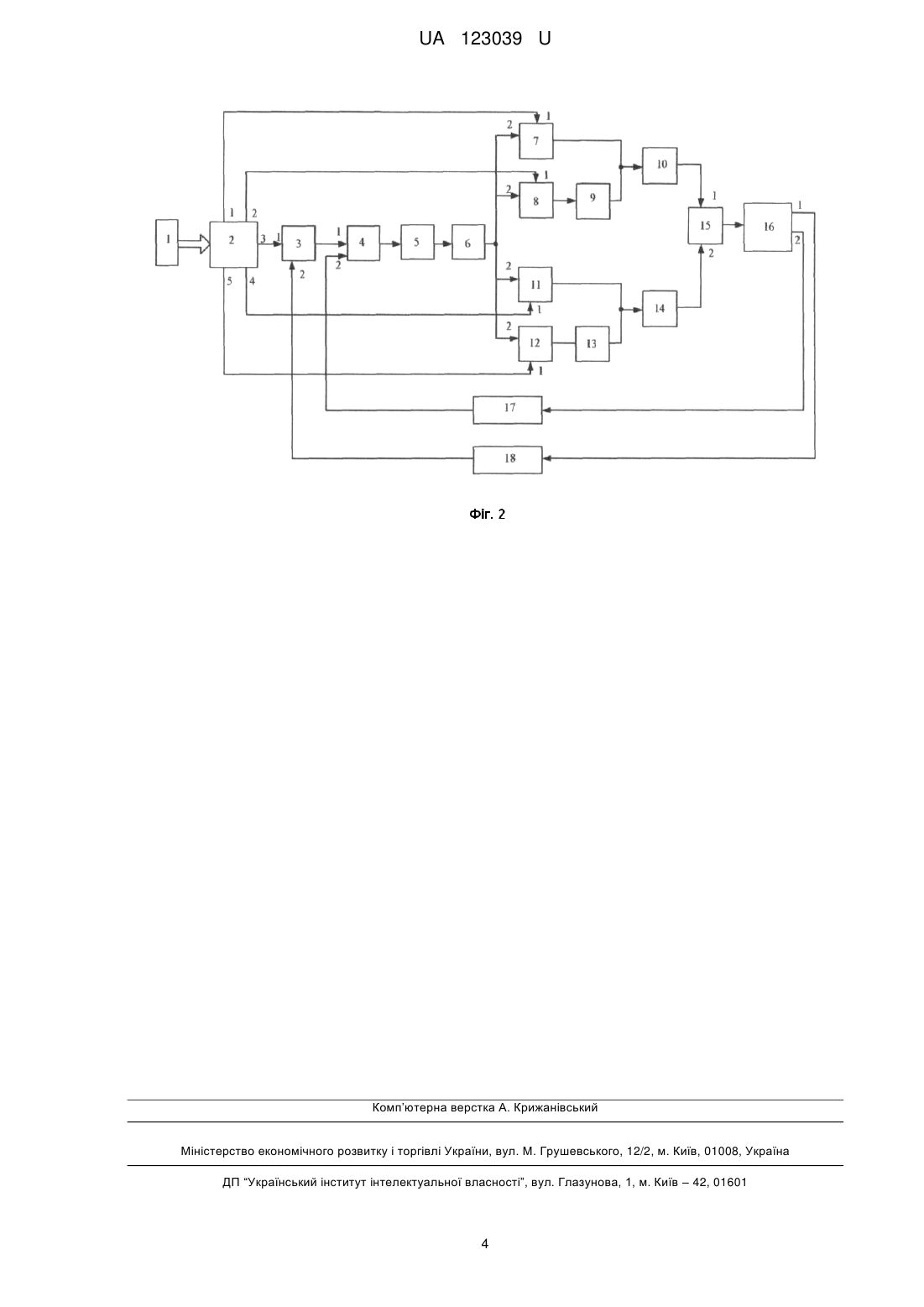
Реферат: Система стабілізації і орієнтації космічного апарата містить порівняльний елемент, датчик кута 18, вхід якого з'єднаний з першим виходом об'єкта керування, датчик кутової швидкості, вхід якого з'єднаний з другим виходом об'єкта керування, вхід якого з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом першого двигуна-маховика, а другий вхід з'єднаний з виходом другого двигуна-маховика, вхід якого з'єднаний з виходом транспортної затримки, підсилювач потужності, вихід порівняльного елемента з'єднаний з першим входом мультиплексора, другий вхід якого з'єднаний з датчиком кутової швидкості, а вихід мультиплексора з'єднаний з входом нечіткого регулятора, вихід якого приєднаний до підсилювача потужності, крім того перший вхід порівняльного елемента з'єднаний з виходом блока управління, вхід якого з'єднаний з блоком програм управління, а перший вихід якого з'єднаний з першим входом першого ключа, другий вихід з'єднаний з першим входом другого ключа, четвертий вихід з'єднаний з першим входом третього ключа, п'ятий вихід з'єднаний з першим входом четвертого ключа, другі входи першого, другого, третього та четвертого ключів з'єднані з виходом підсилювача потужності, вихід першого ключа з'єднаний з входом першого двигуна-маховика, вихід другого ключа через першу транспортну затримку також з'єднаний з входом першого двигуна-маховика, вихід третього ключа з'єднаний з входом-другого двигунамаховика, вихід четвертого ключа через другу транспортну затримку з'єднаний також зі входом другого двигуна-маховика. UA 123039 U (54) СИСТЕМА СТАБІЛІЗАЦІЇ І ОРІЄНТАЦІЇ КОСМІЧНОГО АПАРАТА UA 123039 U UA 123039 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до систем управління космічного апарата і може бути використана при розробці систем орієнтації та стабілізації. Відома система стабілізації космічного апарата [Субота А.М., Симонов В.Ф., Павленко А.В.) "Система стабілізації космічного апарата". Патент на корисну модель, № 109793, кл. МПК B64G 1/24 (2006.01). Україна, опубл. 12.09.2016, Бюл. № 17], яка вибрана як прототип, у своєму складі містить задавач, вихід якого з'єднаний з порівняльним елементом, датчик кутової швидкості, вхід якого з'єднаний з другим виходом об'єкта керування, датчик кута, вхід якого з'єднаний з першим виходом об'єкта керування, вхід якого з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом першого двигуна-маховика, а другий а другий вхід з'єднаний з виходом другого двигуна-маховика, вхід якого з'єднаний з виходом транспортної затримки, підсилювач потужності. Вихід порівняльного елемента з'єднаний з першим входом мультиплексора, другий вхід якого з'єднаний з датчиком кутової швидкості, а вихід мультиплексора з'єднаний з входом нечіткого регулятора, вихід якого приєднаний до підсилювача потужності, підсилювач потужності під'єднаний до першого та другого двигунів-маховиків. Недоліком цієї системи є залежність напряму повороту космічного апарата від одного типу знака сигналу управління, тобто космічний апарат може виконувати поворот тільки за часовою стрілкою і не може виконувати поворот проти часової стрілки при його переорієнтації. В основу корисної моделі поставлена задача розширення функціональних можливостей системи стабілізації і орієнтації космічного апарата. Поставлена задача вирішується тим, що в системі стабілізації і орієнтації космічного апарата, що містить порівняльний елемент, другий вхід якого з'єднаний з першим виходом об'єкта керування, датчик кутової швидкості, вхід якого з'єднаний з другим виходом об'єкта керування, вхід якого з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом першого двигуна-маховика, а другий вхід з'єднаний з виходом другого двигуна-маховика, вхід якого з'єднаний з виходом транспортної затримки, підсилювач потужності, вихід порівняльного елемента з'єднаний з першим входом мультиплексора, другий вхід якого з'єднаний з датчиком кутової швидкості, а вихід мультиплексора з'єднаний з входом нечіткого регулятора, вихід якого приєднаний до підсилювача потужності, згідно з корисною моделлю перший вхід порівняльного елемента з'єднаний з виходом блока управління, вхід якого з'єднаний з блоком програм управління, перший вихід якого з'єднаний з першим входом першого ключа, другий вихід з'єднаний з першим входом другого ключа, третій вихід з'єднаний з першим входом порівняльного елемента, четвертий вихід з'єднаний з першим входом третього ключа, п'ятий вихід з'єднаний з першим входом четвертого ключа, другі входи першого,другого, третього та четвертого ключів з'єднані з виходом підсилювача потужності, вихід першого ключа з'єднаний з входом першого двигуна-маховика, вихід другого ключа через першу транспортну затримку з'єднаний теж з входом першого двигуна-маховика, вихід третього ключа з'єднаний з входомдругого двигуна-маховика, вихід четвертого ключа через другу транспортну затримку з'єднаний також зі входом другого двигуна-маховика. Таким чином, поставлена задача вирішується завдяки забезпеченню можливості виконувати повороти космічного апарата як за часовою стрілкою, так і проти неї з урахуванням моментів включення і виключення двигунів-маховиків в залежності від знака і величини необхідного кута повороту космічного апарата при його орієнтації або стабілізації, які задаються блоком управління. На Фіг. 1 зображені моменти включення і виключення двигунів-маховиків при виробленні моментів управління. На Фіг. 2 - схема системи стабілізації і орієнтації космічного апарата. Система стабілізації і орієнтації космічного апарата містить блок програмного управління 1, вихід якого з'єднаний з входом блока управління 2. Перший вихід блока управління 2, з'єднаний з першим входом першого ключа 7, другий вихід з'єднаний з першим входом другого ключа 8, третій вихід з'єднаний 3 першим входом порівняльного елемента 3, четвертий вихід з'єднаний з першим входом третього ключа 11, п'ятий вихід з'єднаний з першим входом ключа четвертого 12. Другі входи ключів першого 7, другого 8, третього 11 і четвертого 12 з'єднані з виходом підсилювача потужності 6, вхід якого через нечіткий регулятор 5 з'єднаний з виходом мультиплексора 4. Перший вхід мультиплексора 4 з'єднаний з виходом порівняльного елемента 3, другий вхід якого з'єднаний з виходом датчика кута 18, вхід якого з'єднаний з першим виходом об'єкта управління 16. Другий вхід мультиплексора 4 з'єднаний з виходом датчика кутової швидкості 17, вхід якого з'єднаний з другим виходом об'єкта управління 16. Виходи другого ключа 8 через першу транспортну затримку 9 та першого ключа 7 з'єднані з входом першого двигуна-маховика 10. Виходи четвертого ключа 12 через другу транспортну затримку 13 та третього ключа 11 з'єднані з входом другого двигуна-маховика 14. Вихід першого двигуна-маховика 10 з'єднаний з 1 UA 123039 U 5 10 15 20 25 30 35 40 першим входом суматора 15, а вихід другого двигуна-маховика 14 з'єднаний з другим входом суматора 15, вихід якого з'єднаний з входом об'єкта керування 16. Система стабілізації і орієнтації космічного апарата працює наступним чином. Оскільки канали стабілізації і орієнтації космічного апарата проектуються ідентичними по каналам крену γ, тангажа ϑ і рискання ψ, то будемо розглядати принцип дії системи відносно, наприклад, каналу тангажа ϑ. На Фіг. 1 показано принцип формування управляючого моменту при необхідності повороту космічного апарата, наприклад, за часовою стрілкою на деякий кут 3. Щоб це виконати необхідно на двигун-маховик 10 подати такий сигнал управління, щоб на його виході за момент часу t2-t0 виробився момент +м1 (крива 1). При досягненні моменту +м1 двигунмаховик 10 необхідно виключити, але після цього у двигуна-маховика 10 почнеться режим вибігу маховика (крива 2), що призведе до зменшування виробленого моменту +м1. Щоб цього не трапилось необхідно площу s1, що знаходиться під кривою 2, компенсувати. Це досягається включенням в момент часу t1 (крива 3) двигуна-маховика 14 виключенням його в момент часу t2 (крива 4), що і забезпечує компенсацію негативного моменту шляхом виконання умови s1=s2. Алгоритм вироблення моментів часу включення і виключення двигунів-маховиків 10 і 14 у залежності від кута повороту космічного апарата реалізується блоком-управління 2. Виходи 1 і 4 блока управління 2 відповідно з'єднані з першим входом управління першого 7, другого 8, третього 11 і четвертого 12 ключів. Другі входи названих ключів з'єднані з виходом підсилювача потужності 6, на виході якого формується сама величина сигналу управління. У залежності від знака сигналу управління спочатку формується сигнал, наприклад +м1 КА (об'єкта управління 16) за часовою стрілкою, на виході першого ключа 7, який поступає на вхід першого двигуна-маховика 10 на протязі часу t2-t0. При досягненні часу t1 блок управління 2 зі свого виходу 5 виробляє сигнал (-м2), що з виходу підсилювача потужності 6 через ключ 12 і другу транспортну затримку 13 подається на вхід другого двигуна-маховика 14. При досягненні моменту часу t2 блок управління 2 знімає свій сигнал з виходу 5, четвертий ключ 12 закривається і другий двигун-маховик 14 переходе в режим вибігу. Таким чином за рахунок другого двигуна-маховика 14, реактивний момент якого може бути охарактеризований площею s2, досягається компенсація негативного моменту першого-двигуна маховика 10, який характеризується площею s1. Результуючий момент, що прикладається до об'єкта керування 16 формується суматором 15. Якщо необхідно об'єкт керування 16 розвернути на деякий кут проти часової стрілки, то за допомогою блока управління 2 на його виході 4 вироблюється сигнал управління -м1 на протязі часу t2-t0, котрий подається на вхід другого двигуна-маховика 14, а протягом часу t2-t1 з виходу 2 блока управління 2 видається сигнал (+м2), котрий з виходу підсилювача потужності 6 через відкритий другий ключ 8 і транспортну затримку 9 подається на вхід першого двигуна-маховика 10. Результуючий сигнал, сформований на виході суматора 15, подається на об'єкт керування 16. Роботою блока управління 2 керує блок програмного управління 1, згідно з відповідною програмою, або командними сигналами, що можуть подаватися з Землі (на фіг. 2 не показано). З метою забезпечення необхідних показників якості перехідних процесів в системі стабілізації і орієнтації космічного апарата реалізується пропорційно-деференціональний закон управління: i у пр K з K 45 50 55 (1) де K , K - коефіцієнти пропорційності; з - задане програмне значення кута тангажа; поточне значення кута тангажа; - кутова швидкість тангажа. Сигнали тангажа і кутової швидкості виробляються відповідно датчиками кута 18 і датчиком 17 кутової швидкості. Сигнал, пропорційний з формується на виході порівняльного елемента 3, який подається на перший вхід мультиплексора 4, на другий вхід якого подається сигнал з датчика кутової швидкості 17. Таким чином, на виході мультиплексора 4 формується сигнал управління згідно з законом (1), який і подається безпосередньо на вхід нечіткого регулятора 5, входи, виходи і правила функціонування якого відповідним чином вже налагоджені. Проведене моделювання даної системи стабілізації і орієнтації космічного апарата в середовищі Matlab\Simulink показали її працездатність у відповідності до заданих показників якості. 2 UA 123039 U Таким чином, поставлена задача розширення функціональних можливостей системи стабілізації і орієнтації космічного апарата повністю відповідає принципу побудови системи з урахуванням не тільки величини, а і знака сигналу управління. 5 10 15 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Система стабілізації і орієнтації космічного апарата, що містить порівняльний елемент, датчик кута 18, вхід якого з'єднаний з першим виходом об'єкта керування, датчик кутової швидкості, вхід якого з'єднаний з другим виходом об'єкта керування, вхід якого з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом першого двигуна-маховика, а другий вхід з'єднаний з виходом другого двигуна-маховика, вхід якого з'єднаний з виходом транспортної затримки, підсилювач потужності, вихід порівняльного елемента з'єднаний з першим входом мультиплексора, другий вхід якого з'єднаний з датчиком кутової швидкості, а вихід мультиплексора з'єднаний з входом нечіткого регулятора, вихід якого приєднаний до підсилювача потужності, яка відрізняється тим, що перший вхід порівняльного елемента з'єднаний з виходом блока управління, вхід якого з'єднаний з блоком програм управління, а перший вихід якого з'єднаний з першим входом першого ключа, другий вихід з'єднаний з першим входом другого ключа, четвертий вихід з'єднаний з першим входом третього ключа, п'ятий вихід з'єднаний з першим входом четвертого ключа, другі входи першого, другого, третього та четвертого ключів з'єднані з виходом підсилювача потужності, вихід першого ключа з'єднаний з входом першого двигуна-маховика, вихід другого ключа через першу транспортну затримку також з'єднаний з входом першого двигуна-маховика, вихід третього ключа з'єднаний з входом-другого двигуна-маховика, вихід четвертого ключа через другу транспортну затримку з'єднаний також зі входом другого двигуна-маховика. 3 UA 123039 U Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюSubota Anatolii Maksymovych, Dzhulhakov Vitalii Heorhiiovych, Basova Anna Yevhenivna
Автори російськоюСубота Анатолий Максимович, Джулгаков Виталий Георгиевич, Басова Анна Евгеньевна
МПК / Мітки
МПК: B64G 1/24
Мітки: система, стабілізації, космічного, апарата, орієнтації
Код посилання
<a href="https://ua.patents.su/6-123039-sistema-stabilizaci-i-oriehntaci-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації і орієнтації космічного апарата</a>
Система стабілізації космічного апарата
Номер патенту: 109793
Опубліковано: 12.09.2016
Автори: Субота Анатолій Максимович, Павленко Альона Вікторівна, Симонов Володимир Федорович
МПК: B64G 1/24
Мітки: система, апарата, космічного, стабілізації
Формула / Реферат:
Система стабілізації космічного апарата, що містить задатчик, вихід якого з'єднаний з порівняльним елементом, датчик кутової швидкості, вхід якого з'єднаний з другим виходом об'єкта керування, датчик кута, вхід якого з'єднаний з першим виходом об'єкта керування, вхід якого з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом першого двигуна-маховика, а другий вхід з'єднаний з виходом другого двигуна-маховика, вхід якого...
Відмовостійка система кутової стабілізації космічного апарата

Номер патенту: 94309
Опубліковано: 10.11.2014
Автори: Варганич Олексій Сергійович, Субота Анатолій Максимович, Симонов Володимир Федорович
МПК: B64G 1/28
Мітки: кутової, космічного, апарата, система, стабілізації, відмовостійка
Формула / Реферат:
Відмовостійка система кутової стабілізації космічного апарата, що містить перший суматор, на перший вхід якого подається задавальний сигнал, а вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з підсилювачем потужності, вихід якого з'єднаний з електроприводом, вихід якого з'єднаний з маховиком, який з'єднаний з космічним апаратом, з яким з'єднані датчик кута тангажа та датчик кутової швидкості, яка відрізняється...
Система стабілізації напруги системи електроживлення космічного апарата
Номер патенту: 96444
Опубліковано: 10.02.2015
Автори: Зимовін Анатолій Якович, Ковалевська Олена Ігорівна
МПК: G05F 1/00
Мітки: напруги, апарата, електроживлення, системі, космічного, стабілізації, система
Формула / Реферат:
Система стабілізації напруги системи електроживлення космічного апарата, що містить сонячну батарею, яка мінусовим полюсом підключена до загальної шини, а другим полюсом з'єднана з регулятором, акумуляторну батарею, розділовий діод, з'єднаний з ємнісним фільтром, підключеним паралельно навантаженню, яка відрізняється тим, що в систему введений регулятор заряду, який через зарядний діод з'єднано з загальною шиною, регулятор розряду,...
Адаптивна система стабілізації космічного літального апарата

Номер патенту: 46189
Опубліковано: 10.12.2009
Автори: Бандура Іван Миколайович, Демидова Вікторія Олександрівна
МПК: B64G 1/24
Мітки: космічного, літального, система, апарата, адаптивна, стабілізації
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка містить датчик кута, вихід якого з'єднаний з першим входом блока керування, датчик кутової швидкості, вихід якого з'єднаний з другим входом блока керування, вихід блока керування через блок підсилювачів потужності з'єднаний з релейним виконавчим органом, яка відрізняється тим, що в неї введений блок визначення мінімального керуючого імпульсу, вхід якого з'єднаний з виходом...
Адаптивна система стабілізації космічного літального апарата
Номер патенту: 45233
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Вировець Аліна Володимирівна
МПК: B64G 1/24
Мітки: система, стабілізації, космічного, адаптивна, апарата, літального
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка має датчик кута, вихід якого під'єднаний до першого входу блока керування, датчик кутової швидкості, вихід якого під'єднаний до другого входу блока керування, а вихід блока керування через блок підсилювачів потужності підключений до релейних виконавчих органів, яка відрізняється тим, що в неї введені блок визначення збурюючого моменту, вихід якого під'єднаний до четвертого...
Попередній патент: Виделка столова
Наступний патент: Формувач періодичної послідовності з перенастроюваною тривалістю імпульсів і паузи і програмованою затримкою початку формування відносно стартового імпульсу
Випадковий патент: Суміш для виготовлення вогнетривів