Система стабілізації космічного апарата
Номер патенту: 109793
Опубліковано: 12.09.2016
Автори: Субота Анатолій Максимович, Павленко Альона Вікторівна, Симонов Володимир Федорович
Формула / Реферат
Система стабілізації космічного апарата, що містить задатчик, вихід якого з'єднаний з порівняльним елементом, датчик кутової швидкості, вхід якого з'єднаний з другим виходом об'єкта керування, датчик кута, вхід якого з'єднаний з першим виходом об'єкта керування, вхід якого з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом першого двигуна-маховика, а другий вхід з'єднаний з виходом другого двигуна-маховика, вхід якого з'єднаний з виходом транспортної затримки, підсилювач потужності, яка відрізняється тим, що вихід порівняльного елемента з'єднаний з першим входом мультиплексора, другий вхід якого з'єднаний з датчиком кутової швидкості, а вихід мультиплексора з'єднаний з входом нечіткого регулятора, вихід якого приєднаний до підсилювача потужності, підсилювач потужності під'єднаний до першого та другого двигунів-маховиків.
Текст
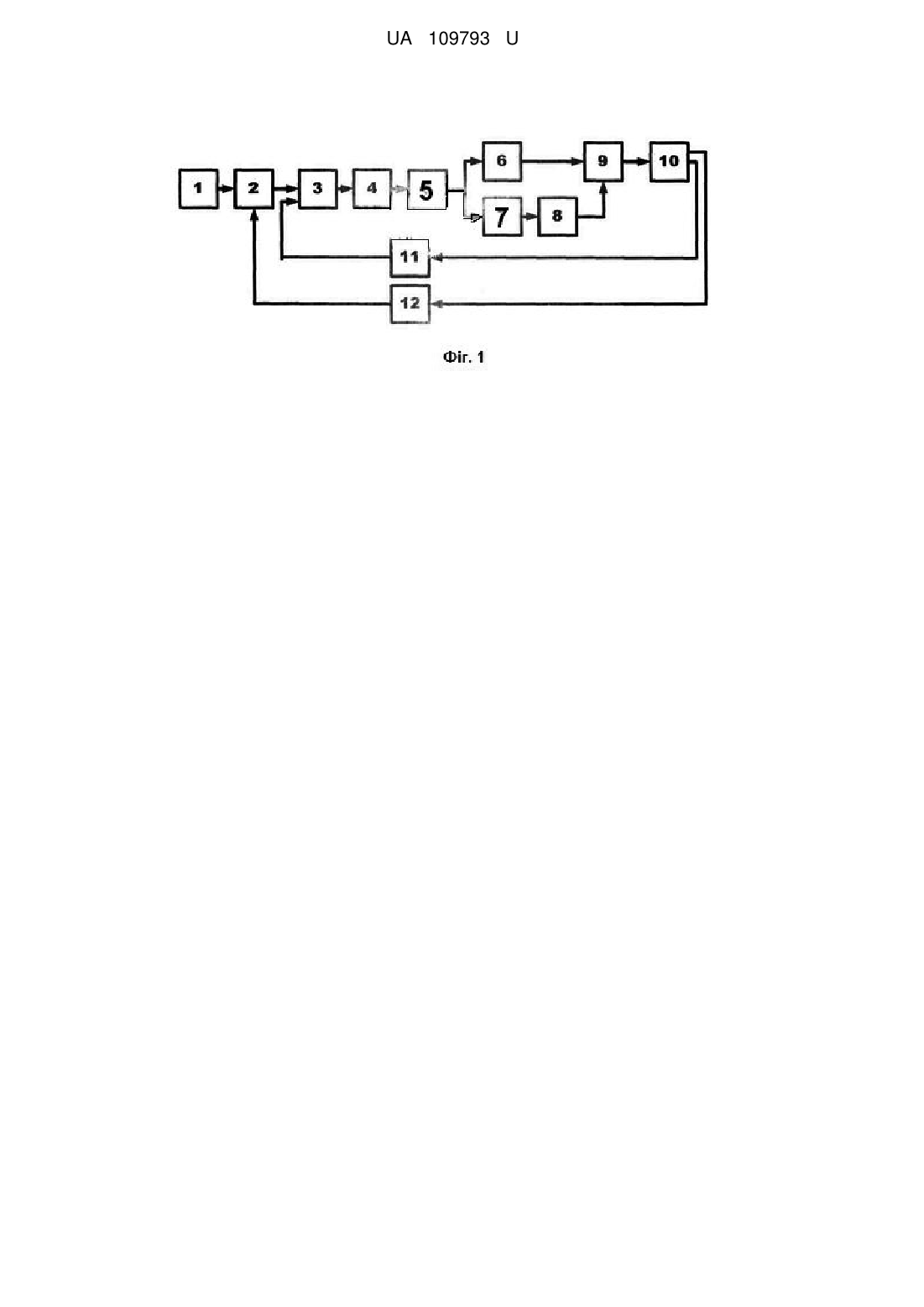
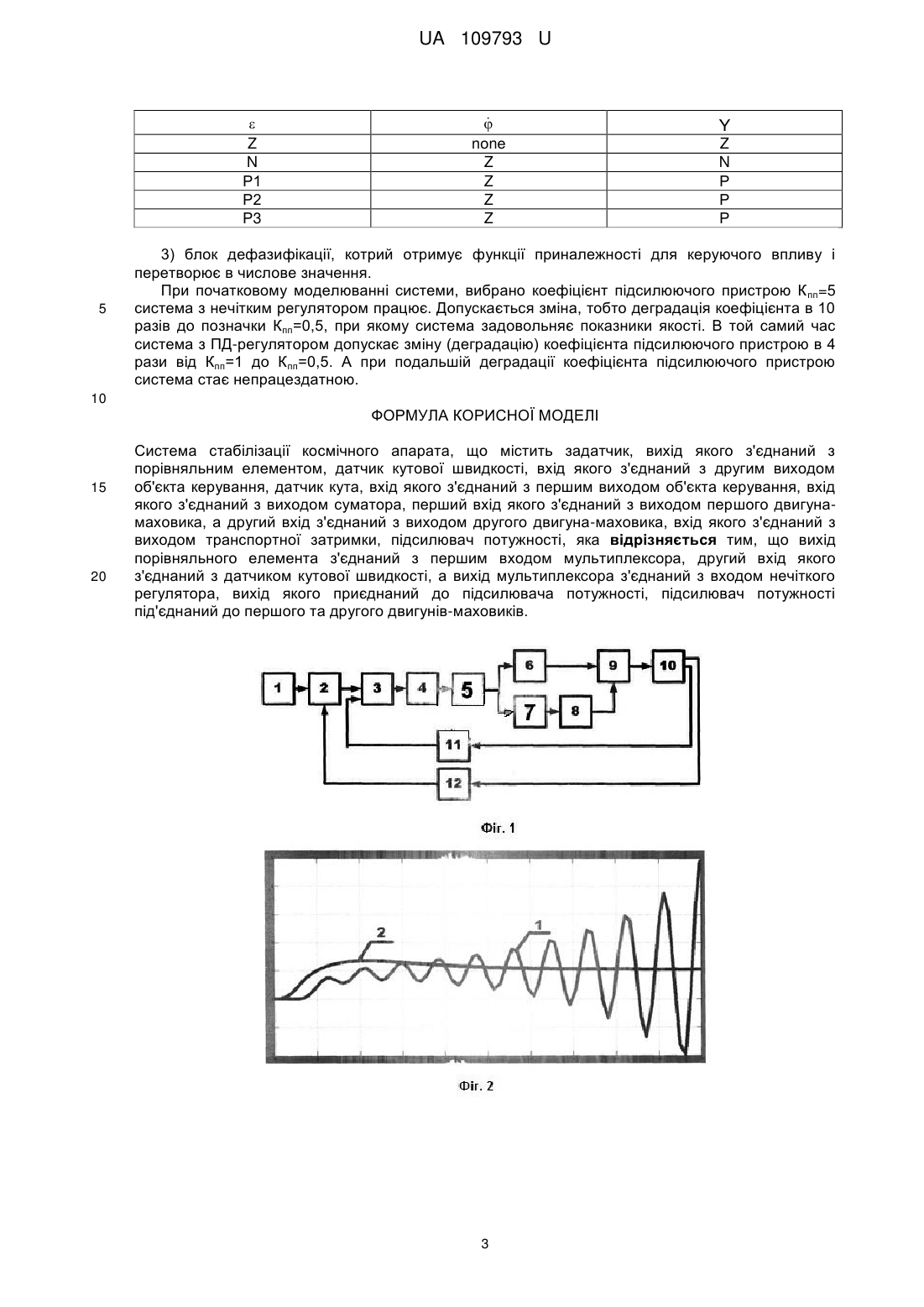
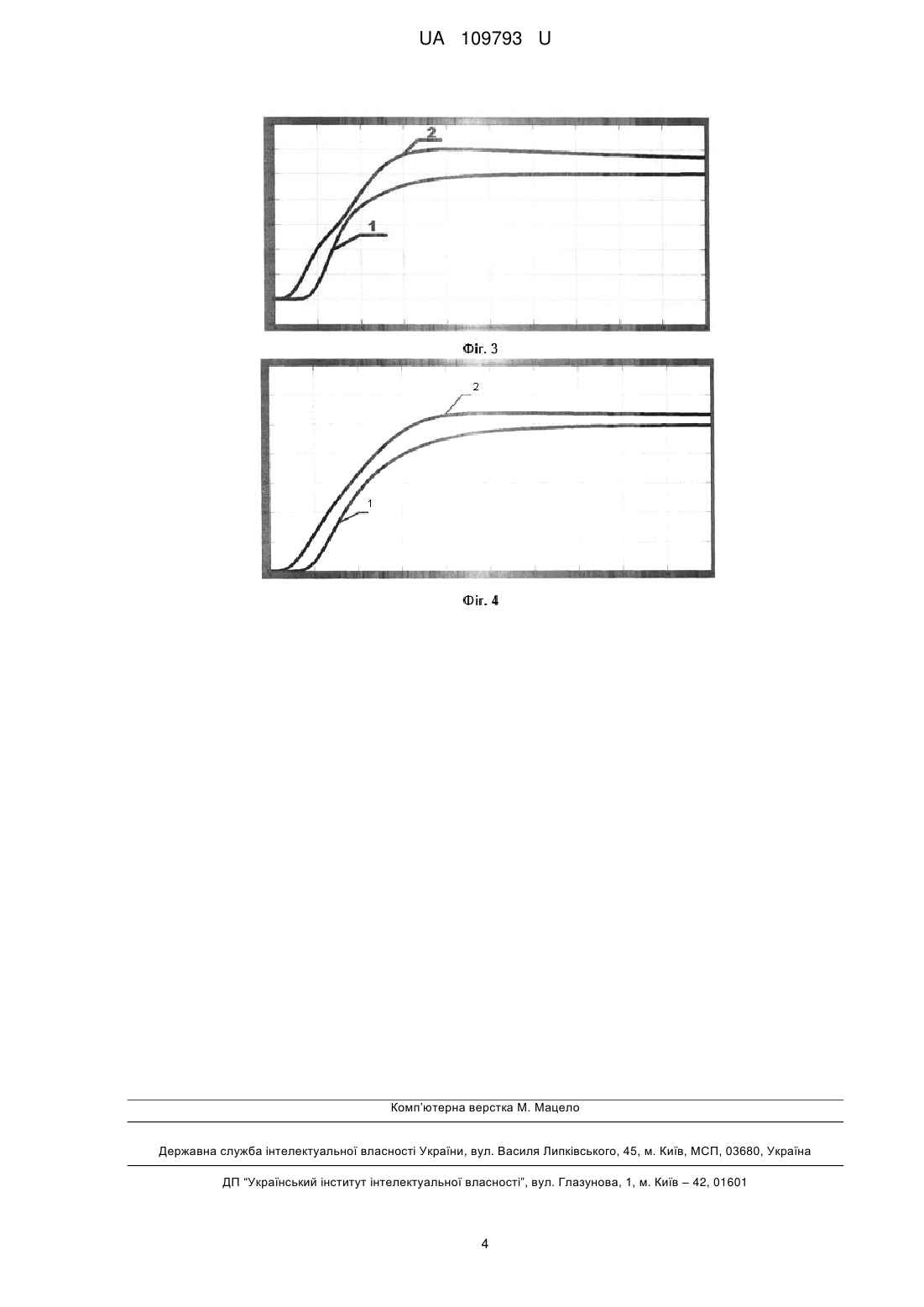
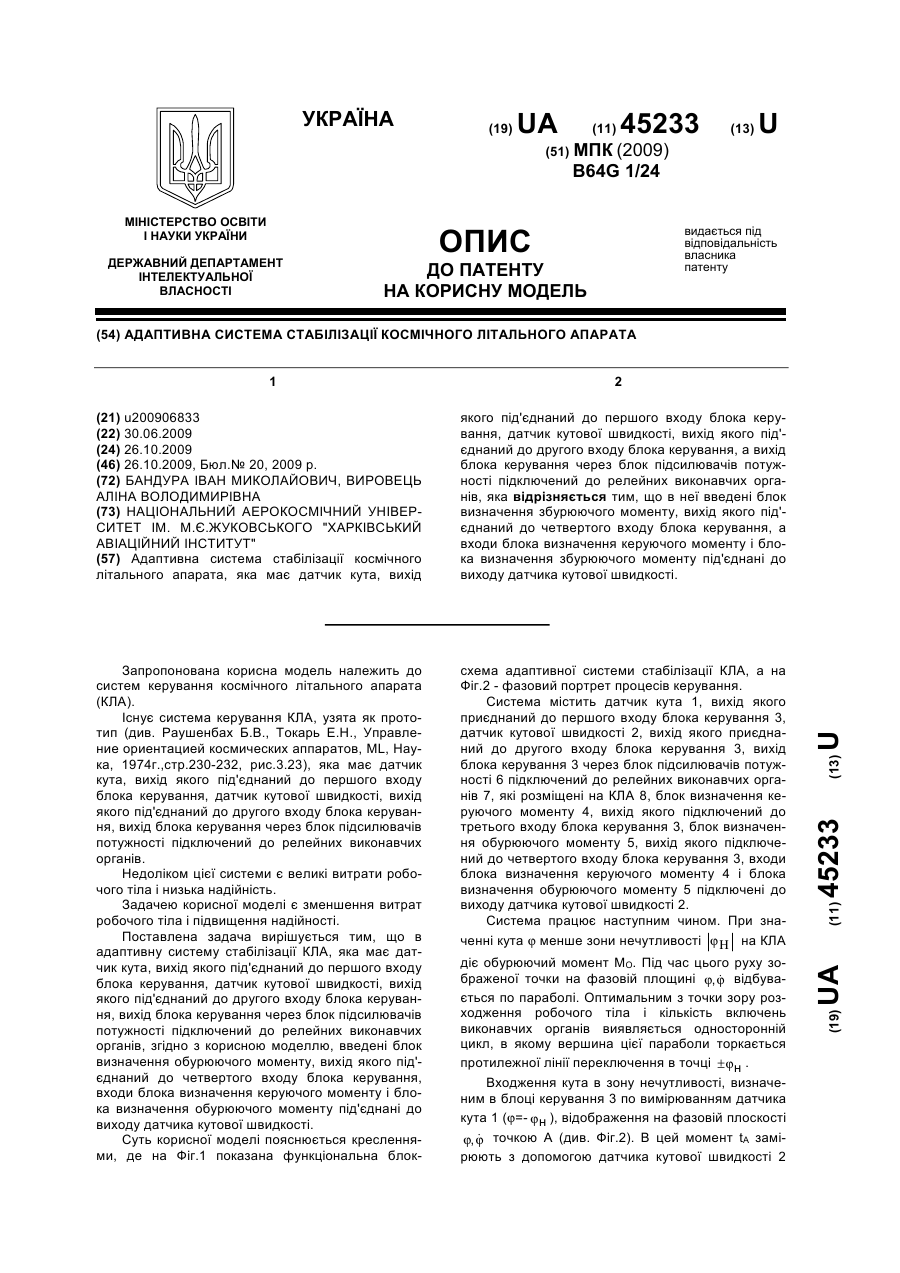
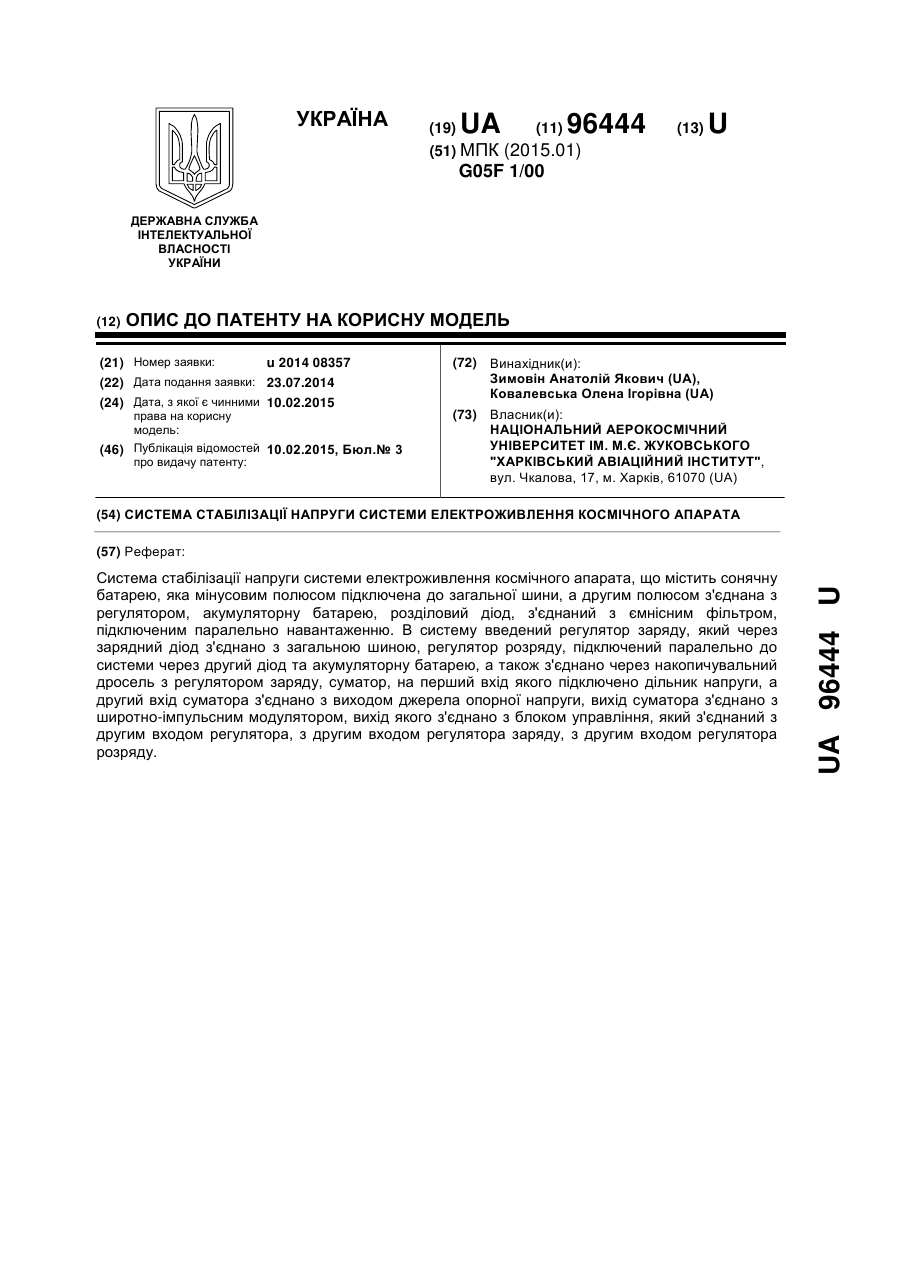
Реферат: Система стабілізації космічного апарата містить задатчик, вихід якого з'єднаний з порівняльним елементом, датчик кутової швидкості, вхід якого з'єднаний з другим виходом об'єкта керування, датчик кута, вхід якого з'єднаний з першим виходом об'єкта керування, вхід якого з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом першого двигуна-маховика, а другий вхід з'єднаний з виходом другого двигуна-маховика, вхід якого з'єднаний з виходом транспортної затримки, підсилювач потужності. Вихід порівняльного елемента з'єднаний з першим входом мультиплексора, другий вхід якого з'єднаний з датчиком кутової швидкості, а вихід мультиплексора з'єднаний з входом нечіткого регулятора, вихід якого приєднаний до підсилювача потужності, підсилювач потужності під'єднаний до першого та другого двигунівмаховиків. UA 109793 U (54) СИСТЕМА СТАБІЛІЗАЦІЇ КОСМІЧНОГО АПАРАТА UA 109793 U UA 109793 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до системи управління космічного апарата і може бути використана при розробці систем орієнтації та стабілізації. Відома система стабілізації та орієнтації космічного апарата на базі двигунів-маховиків [див. Субота А.М., Симонов В.Ф., Резнікова О.В. Исследование качества ориентации и стабилизации космического апарата с использованием двигателей-маховиков и магнитных и исполнительных органов [Текст] "Авиационно-космическая техника и технология": Харьков "ХАИ", № 5 (102), 2013 (стр. 64, рис. 2)], яка вибрана як найближчий аналог, у своєму складі містить задатчик, вихід якого з'єднаний з першим входом першого порівняльного елемента, другий вхід якого через датчик кута з'єднаний з першим виходом об'єкта керування, а вихід з'єднаний з входом першого підсилювача, вихід якого з'єднаний з першим входом другого порівняльного елемента, другий вхід якого через датчик кутової швидкості з'єднаний з другим виходом об'єкта керування, а вихід з'єднаний з входами першого двигуна-маховика та блоком транспортної затримки, вихід якої з'єднаний з входом другого двигуна-маховика, вихід якого з'єднаний з другим входом суматора, перший вхід якого з'єднаний з виходом першого двигуна-маховика, а вихід з'єднаний з входом об'єкта керування. Недоліком цієї системи є відсутність адаптації до процесу деградації окремих функціональних елементів, що входять в структуру системи стабілізації, наприклад, коефіцієнта передачі підсилювачів, у разі їх старіння за час експлуатації. В основу корисної моделі поставлена задача адаптації системи до процесу деградації окремих функціональних елементів. Поставлена задача вирішується тим, що в системі стабілізації космічного апарата, що містить задатчик, вихід якого з'єднаний з порівняльним елементом, датчик кутової швидкості, вхід якого з'єднаний з другим виходом об'єкта керування, датчик кута, вхід якого з'єднаний з першим виходом об'єкта керування, вхід якого з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом першого двигуна-маховика, а другий вхід з'єднаний з виходом другого двигуна-маховика, вхід якого з з'єднаний з виходом транспортної затримки, підсилювач потужності, згідно з корисною моделлю, вихід порівняльного елемента з'єднаний з першим входом мультиплексора, другий вхід якого з'єднаний з датчиком кутової швидкості, а вихід мультиплексора з'єднаний з входом нечіткого регулятора, вихід якого приєднаний до підсилювача потужності, підсилювач потужності під'єднаний до першого та другого двигунівмаховиків. Таким чином, поставлена задача вирішується завдяки заміні у відомій системі пропорційнодиференційного регулятора (ПД-регулятор) на нечіткий регулятор. На фіг. 1 зображена функціональна схема системи стабілізації космічного апарата, що заявляється. На фіг. 2 - моделювання системи в середовищі MathLab/Simulink при коефіцієнті 5; 1 - система з ПД-регулятором, 2 - система з нечітким регулятором. На фіг. 3 - моделювання системи в середовищі MathLab/Simulink при коефіцієнті 1; 1 - система з ПД-регулятором, 2 система з нечітким регулятором. На фіг. 4 - моделювання системи в середовищі MathLab/Simulink при коефіцієнті 0.5; 1 - система з ПД-регулятором, 2 - система з нечітким регулятором. Система стабілізації космічного апарата містить задатчик 1, вихід якого з'єднаний з першим входом порівняльного елемента 2. Другий вхід порівняльного елемента 2 з'єднаний з виходом датчика кута 12, вхід якого з'єднаний з першим виходом об'єкта керування 10. Вихід порівняльного елемента 2 з'єднаний з першим входом мультиплексора 3, другий вхід якого з'єднаний з виходом датчика кутової швидкості11, вхід якого з'єднаний з другим виходом об'єкта керування 10. Вихід мультиплексора 3 з'єднаний з входом нечіткого регулятора 4, вихід якого з'єднаний з входом підсилювача потужності 5. Вихід підсилювача потужності 5 одночасно з'єднаний з входом першого двигуна-маховика 6 та транспортної затримки 7. Вихід транспортної затримки 7 з'єднаний з входом другого двигуна-маховика 8, вихід якого з'єднаний з другим входом суматора 9, перший вхід якого з'єднаний з виходом першого двигуна-маховика 6. Вихід суматора 9 з'єднаний з входом об'єкта керування 10. Система стабілізації космічного апарата працює наступним чином. Розглянемо систему стабілізації космічного апарата по одному з каналів, наприклад, по каналу тангажа . Коли необхідно застабілізувати космічний апарат навколо осі тангажа з наперед відомим кутом , то із задатчика 1 видається програмне значення кута пр . Цей сигнал порівнюється з поточним сигналом тангажа , що вимірюється за допомогою датчика кута 12. Здобута таким чином різниця: пр . 1 UA 109793 U З виходу порівняльного елемента 2 подається на перший вхід мультиплексора 3, на другий вхід якого подається сигнал з виходу датчика кутової швидкості 11, пропорційний кутовій швидкості . Сформований таким чином закон стабілізації: і у пр k (пр ) к . 5 10 15 20 25 30 З виходу мультиплексора 3 надходить на вхід нечіткого регулятора 4. На виході нечіткого регулятора 4, згідно з його налагоджуванням внутрішньої структури, виробляється сигнал, що надходить на вхід підсилювача потужності 5. Цей сигнал одночасно надходить на вхід першого двигуна-маховика 6 і на вхід транспортної затримки 7. В результаті цього, з виходу першого двигуна-маховика 6 виробляється реактивний момент, пропорційний його моменту інерції і прискоренню: Му пр1 I1 1 . Завдяки цьому моменту космічний апарат займає потрібне положення по куту тангажа пр . Щоб компенсувати виникнення протилежного моменту при закінченні сигналу управління, сигнал управління після транспортної затримки 7 подається на вхід другого двигуна-маховика 8. Цей двигун-маховик розвиває також реактивній момент, але протилежного знака і меншої величини: Му пр2 k I2 2 , де k - пропорційний коефіцієнт. Таким чином на космічний апарат буде впливати тільки момент: M Му пр1 Му пр2 , який необхідний для стабілізації величини заданого задатчиком 1 програмного значення кута пр . Перед тим, як спроектувати систему стабілізації космічного апарата треба сформувати необхідні вимоги до показників якості, наприклад, час перехідного процесу t пп і перерегулювання повинні бути в допустимих межах: tпп tmax ; (1) 6max . За приклад візьмемо середньо магістральний літак з наступними показниками якості: tпп 10 c, 10 % . Далі обґрунтовують необхідний закон регулювання. У даному випадку закон регулювання положення космічного апарата відносно одного з каналів стабілізації був вибраний як пропорційно-диференціальний k1(зад ) k 2 , (2) де k1, k 2 - коефіцієнти пропорційності; зад - задане кутове положення космічного апарата відносно однієї з осей стабілізації (X, Y, 35 Z); - поточне значення кута (тангажа , крену 40 45 50 , курсу ); - поточне значення кутової швидкості (тангажа , крену , курсу ). Вибір такого закону регулювання (2) було обумовлено законом, що відповідає системі стабілізації, вибраної у якості найближчого аналога. Це обумовлено необхідністю проведення порівняльних характеристик систем стабілізації космічного апарата найближчого аналога з наявністю ПД-регулятора і системи з нечітким регулятором при одних і тих же умовах і характеристиках елементів, що входять до їх складу (підсилювачів, двигунів-маховиків, датчиків кута і кутової швидкості, транспортної затримки, об'єкта керування). Для наглядної демонстрації при проведенні порівняльних характеристик використано середовище MathLab/Simulink. Для моделювання системи необхідно настроїти роботу нечіткого регулятора. Блок правил нечіткого регулятора складається з наступних функціональних елементів: 1) блок фазифікації, котрий здійснює перетворення вхідних лінгвістичних змінних в терммножину, який описується на універсальній множині функціями приналежності. В даному випадку обрано функції приналежності трикутного типу; 2) блок формування логічного рішення. Блок був настроєний згідно з правилами, наведеними нижче; 2 UA 109793 U Z N Р1 Р2 Р3 5 nоnе Z Z Z Z Y Z N Р Р Р 3) блок дефазифікації, котрий отримує функції приналежності для керуючого впливу і перетворює в числове значення. При початковому моделюванні системи, вибрано коефіцієнт підсилюючого пристрою К пп=5 система з нечітким регулятором працює. Допускається зміна, тобто деградація коефіцієнта в 10 разів до позначки Кпп=0,5, при якому система задовольняє показники якості. В той самий час система з ПД-регулятором допускає зміну (деградацію) коефіцієнта підсилюючого пристрою в 4 рази від Кпп=1 до Кпп=0,5. А при подальшій деградації коефіцієнта підсилюючого пристрою система стає непрацездатною. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Система стабілізації космічного апарата, що містить задатчик, вихід якого з'єднаний з порівняльним елементом, датчик кутової швидкості, вхід якого з'єднаний з другим виходом об'єкта керування, датчик кута, вхід якого з'єднаний з першим виходом об'єкта керування, вхід якого з'єднаний з виходом суматора, перший вхід якого з'єднаний з виходом першого двигунамаховика, а другий вхід з'єднаний з виходом другого двигуна-маховика, вхід якого з'єднаний з виходом транспортної затримки, підсилювач потужності, яка відрізняється тим, що вихід порівняльного елемента з'єднаний з першим входом мультиплексора, другий вхід якого з'єднаний з датчиком кутової швидкості, а вихід мультиплексора з'єднаний з входом нечіткого регулятора, вихід якого приєднаний до підсилювача потужності, підсилювач потужності під'єднаний до першого та другого двигунів-маховиків. 3 UA 109793 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64G 1/24
Мітки: космічного, система, стабілізації, апарата
Код посилання
<a href="https://ua.patents.su/6-109793-sistema-stabilizaci-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації космічного апарата</a>
Відмовостійка система кутової стабілізації космічного апарата

Номер патенту: 94309
Опубліковано: 10.11.2014
Автори: Варганич Олексій Сергійович, Субота Анатолій Максимович, Симонов Володимир Федорович
МПК: B64G 1/28
Мітки: космічного, відмовостійка, апарата, система, стабілізації, кутової
Формула / Реферат:
Відмовостійка система кутової стабілізації космічного апарата, що містить перший суматор, на перший вхід якого подається задавальний сигнал, а вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з підсилювачем потужності, вихід якого з'єднаний з електроприводом, вихід якого з'єднаний з маховиком, який з'єднаний з космічним апаратом, з яким з'єднані датчик кута тангажа та датчик кутової швидкості, яка відрізняється...
Адаптивна система стабілізації космічного літального апарата

Номер патенту: 46189
Опубліковано: 10.12.2009
Автори: Демидова Вікторія Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: система, літального, стабілізації, адаптивна, апарата, космічного
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка містить датчик кута, вихід якого з'єднаний з першим входом блока керування, датчик кутової швидкості, вихід якого з'єднаний з другим входом блока керування, вихід блока керування через блок підсилювачів потужності з'єднаний з релейним виконавчим органом, яка відрізняється тим, що в неї введений блок визначення мінімального керуючого імпульсу, вхід якого з'єднаний з виходом...
Адаптивна система стабілізації космічного літального апарата
Номер патенту: 45233
Опубліковано: 26.10.2009
Автори: Вировець Аліна Володимирівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: стабілізації, космічного, адаптивна, система, апарата, літального
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка має датчик кута, вихід якого під'єднаний до першого входу блока керування, датчик кутової швидкості, вихід якого під'єднаний до другого входу блока керування, а вихід блока керування через блок підсилювачів потужності підключений до релейних виконавчих органів, яка відрізняється тим, що в неї введені блок визначення збурюючого моменту, вихід якого під'єднаний до четвертого...
Система стабілізації напруги системи електроживлення космічного апарата
Номер патенту: 96444
Опубліковано: 10.02.2015
Автори: Ковалевська Олена Ігорівна, Зимовін Анатолій Якович
МПК: G05F 1/00
Мітки: космічного, системі, напруги, електроживлення, апарата, система, стабілізації
Формула / Реферат:
Система стабілізації напруги системи електроживлення космічного апарата, що містить сонячну батарею, яка мінусовим полюсом підключена до загальної шини, а другим полюсом з'єднана з регулятором, акумуляторну батарею, розділовий діод, з'єднаний з ємнісним фільтром, підключеним паралельно навантаженню, яка відрізняється тим, що в систему введений регулятор заряду, який через зарядний діод з'єднано з загальною шиною, регулятор розряду,...
Адаптивна система демпфірування початкової кутової швидкості космічного літального апарата

Номер патенту: 53727
Опубліковано: 11.10.2010
Автори: Бандура Іван Миколайович, Богатюк Ольга Анатоліївна, Кулік Анатолій Степанович
МПК: B64G 1/24
Мітки: адаптивна, космічного, швидкості, літального, демпфірування, апарата, кутової, початкової, система
Формула / Реферат:
Адаптивна система демпфірування початкової кутової швидкості космічного літального апарата, що містить датчик кутової швидкості, вихід якого приєднаний до першого входу блока керування, вихід якого через блок підсилювачів потужності з'єднаний з релейними виконавчими органами, яка відрізняється тим, що в неї введений блок визначення збурюючого моменту, вхід якого з'єднаний з виходом датчика кутової швидкості, а його вихід з'єднаний з другим...
Попередній патент: Фармацевтична композиція у формі стоматологічного гелю з пародонтопротекторною дією
Наступний патент: Пристрій для торцевого загартування зразків з металу
Випадковий патент: Спосіб електричного знеболювання