Гідропривод землерійної машини
Номер патенту: 16977
Опубліковано: 29.08.1997
Автори: Ремарчук Микола Парфенійович, Сарахманов Дмитро Дмитрійович, Власов Олександр Іванович, Зоріна Олена Василівна



Формула / Реферат
Гидропривод землеройной машины, включающий масляный бак, насос, систему распределения рабочей среды, гидрозамок двухстороннего действия с двумя каналами входа и выхода, обратный и управляемый перепускной клапаны, гидравлические тормозные устройства, гидроцилиндры рабочего оборудования ковша, заслонки и задней стенки, связанные между собой, а также исполнительными гидролиниями, при этом у упомянутых гидроцилиндров штоковые полости сообщены исполнительными гидролиниями друг с другом, поршневые полости гидроцилиндров ковша связаны с системой распределения рабочей среды посредством первых каналов входа и выхода гидрозамка двухстороннего действия, поршневая полость гидроцилиндра заслонки связана с системой распределения рабочей среды через обратный и управляемый перепускной клапаны, а камера управления управляемого перепускного клапана сообщена со штоковыми полостями гидроцилиндров ковша через гидравлические тормозные устройства и вторые каналы входа и выхода гидрозамка двухстороннего действия, отличающийся тем, что система распределения рабочей среды выполнена в виде одного силового распределителя с системой силового воздействия на золотчик, включающий две камеры управления золотником, блок питания низкого давления, блоки дистанционного управления, которые включают в себя гидролинии питания и слива, правую и левую командные гидролинии и систему включения блоков, гидропривод также снабжен дополнительными гидрозамками двухстороннего действия с двумя каналами входа и выхода и гидрозамками одностороннего действия с камерой управления и каналом входа и выхода, при этом количество блоков дистанционного управления и дополнительных гидрозамков двухстороннего действия каждого из них равно количеству гидроцилиндров рабочего оборудования, а количество односторонних гидрозамков в два раза больше, причем блок питания низкого давления соединен с гидролинией питания каждого блока дистанционного управления, а сливными гидролинйями блоки соединены с масляным баком, при этом левые командные гидролинии каждого блока дистанционного управления соединены с камерами управления гидрозамков одностороннего действия, каналы выхода которых сообщены со штоковыми полостями гидроцилиндров ковша, заслонки и задней стенки и одновременно через первые соответствующие каналы входа и выхода гидрозамков двухстороннего действия эти же левые командные гидролинии совместно соединены с левой камерой управления силового воздействия на золотник силового распределителя, а правые командные гидролинии каждого блока дистанционного управления соединены с камерами управления гидрозамков одностороннего действия, каналы выхода которых сообщены с поршневыми полостями гидроцилиндров ковша, заслонки и задней стенки и одновременно через вторые соответствующие каналы входа и выхода гидрозамков двухстороннего действия эти же правые командные гидролинии совместно соединены с правой камерой управления силового воздействия на золотник силового распределителя, причем один из каналов выхода силового распределителя соединен через каналы входа и выхода гидрозамков одностороннего действия со штоковыми, а второй канал выхода силового распределителя — с поршневыми полостями гидроцилиндров ковша, заслонки и задней : стенки.
Текст
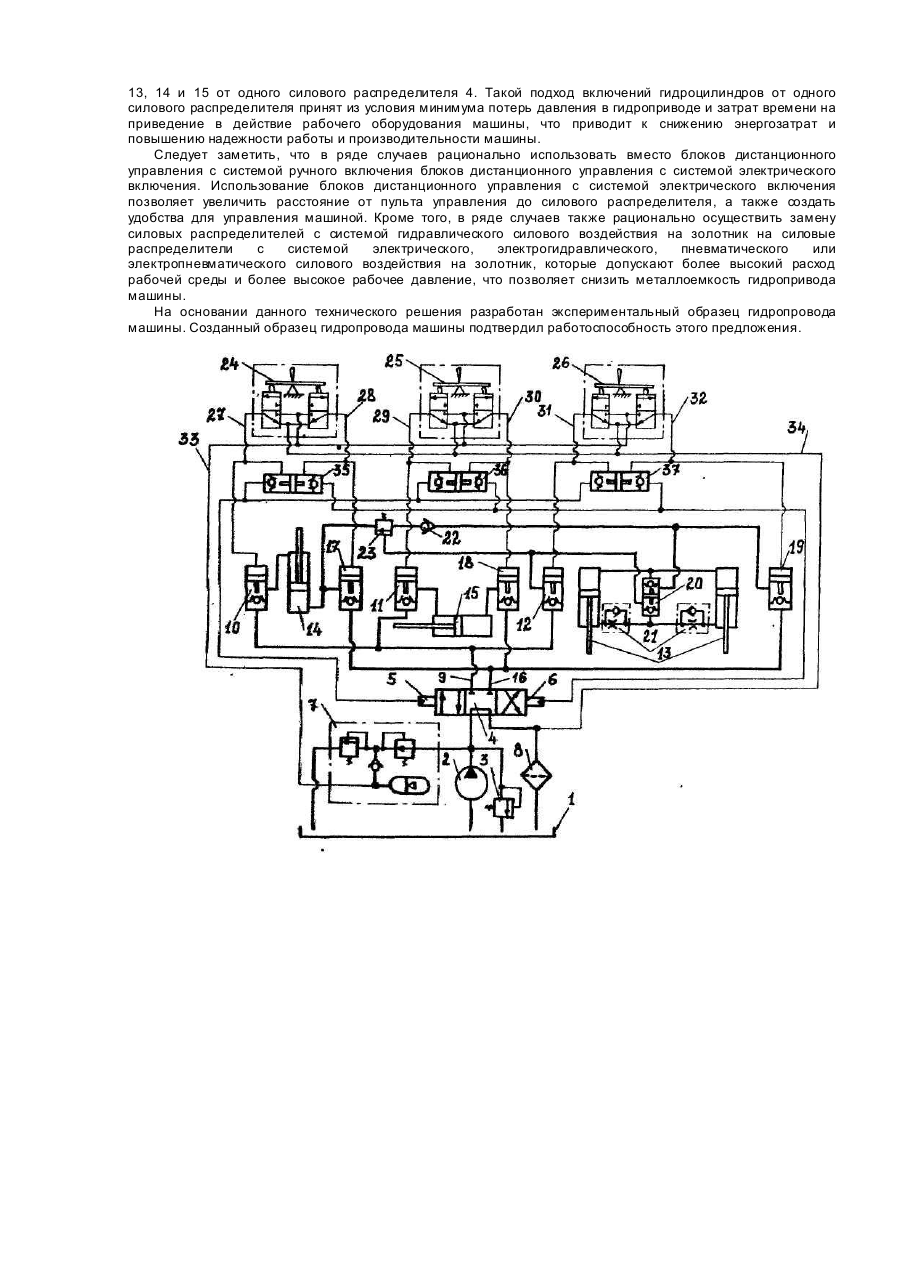
Изобретение относится к машиностроению, в частности землеройным машинам и может быть использовано при разработке гидрофицированных машин с обеспечением расширенных функциональных возможностей силовых распределителей при уменьшении их количества, снижении при этом нагруженности гидроцилиндров, потерь давления в гидроприводе и времени на включение гидроцилиндров в работу. Наиболее близким к заявляемому техническому решению и принятым в качестве прототипа является гидропривод землеройной машины, d частности гидропривод скрепера [1], включающий масляный бак, насос, гидрозамок двухстороннего действия с двумя каналами входа и выхода, обратный и перепускной управляемый клапаны, гидравлические тормозные устройства, гидроцилиндры рабочего оборудования ковша, заслонки и задней стенки с их индивидуальными силовыми распределителями с двумя каналами выхода для рабочей среды и системой силового воздействия на их золотники, выполненной в виде системы ручного воздействия на золотники. У гидроцилиндров ковша, заслонки и задней стенки штоковые полости исполнительными гидролиниями сообщены друг с другом и одновременно с каждым силовым распределителем через один из его выходов. Поршневые полости этих гидроцилиндров исполнительными гидролиниями соединены с каждым силовым распределителем через вторые его выходы. Причем второй выход силового распределителя, обеспечивающий включение в работу поршневой полости гидроцилиндра ковша одновременно сообщен через обратный и перепускной управляемый клапаны и первые (верхние) каналы входа и вы хода гидрозамка двухстороннего действия с поршневой полостью гидроцилиндра заслонки, а камера управления перепускного управляемого клапана сообщена со штоковой полостью гидроцилиндров ковше через гидравлические тормозные устройства и вторые (нижние) каналы входа и вы хода гидрозамка двухстороннего действия. Объединение одноименных полостей гидроцилиндров рабочего оборудования машины, в частности, ковша, заслоно и задней стенки, например, штоковых полостей упомянутых гидроцилиндров и одновременно сообщение их с одним из выходов каждого силового распределителя способствует в данном техническом решении уменьшению длины исполнительных гидролиний, а также некоторому снижению потерь давления в этих гидролиниях и улучшению процесса управления гидроцилиндрами, что является достоинством данного технического решения. Так, при подаче рабочей среды от насоса через один из каналов выхода силового распределителя по исполнительным гидролиниям в штоковые полости гидроцилиндров ковша рабочая среда поступает одновременно в штоковые полости гидроцилиндров заслонки и задней стенки. При этом давление, действующее в штоковых полостях гидроцилиндров ковша, определяется массой ковша и полезным грузом, размещенным в нем и исходя из гидравлической связи, такое же давление действует в штоковых полостях заслонки и задней стенки, что приводит к дополнительной нагруженности гидроцилиндров заслонки и задней стенки. Поскольку со сливом связаны только поршневые полости гидроцилиндров ковша, то ввиду этого обеспечивается подъем ковша. Наличие механической связи между заслонкой и ковшом приводит к тому, что одновременно с подъемом ковша, обеспечивается также подъем заслонки, гидроцилиндр которой штоковой полостью работает в насосном режиме. Вследствие этого вытесняемая рабочая среда из штоковой полости гидроцилиндра заслонки поступает в штоковую полость гидроцилиндра ковша, тем самым увеличивая скорость подъема ковша. Благодаря гидравлической связи давление, определяемое нагрузкой действующей на штоках гидроцилиндров ковша, соответствуе т давлению в штоковых полостях гидроцилиндров ковша и в камере управления перепускного клапана, который открывается и рабочая среда из поршневой полости этих гидроцилиндров поступает через обратный и управляемый перепускной клапаны в поршневую полость гидроцилиндра заслонки, предотвращая тем самым разрежение в поршневой полости гидроцилиндра заслонки. Таким образом, объединение исполнительными гидролиниями одноименных штоковых полостей гидроцилиндров ковша, заслонки и задней стенки способствует улучшению процесса управления этими гидроцилиндрами, сокращению длин исполнительных гидролиний, соединяющих силовые распределители с гидроцилиндрами, а следовательно, некоторому уменьшению потерь давления в этих гидролиниях, что, как отмечено выше, является достоинством данного технического решения. Вместе с тем объединение штоковой полости гидроцилиндра задней стенки со штоковими полостями гидроцилиндров ковша и заслонки приводит к дополнительной нагрузке штоковой полости гидроцилиндра задней стенки и, в частности, уплотнительных устройств этого гидроцилиндра, что существенно снижает надежность его работы. Использование для каждого вида рабочего оборудования, приводимого в движение одиночными или параллельно соединенными гидроцилиндрами посредством индивидуальных силовых распределителей приводит к увеличению потерь давления в гидроприводе машины, а также металлоемкости гидропривода, требует приложения значительных усилий к рукоятке системы ручного силового воздействия на золотники силовых распределителей и повышению времени на включение их в работу, а следовательно, рабочего оборудования, управляемого силовыми распределителями, что является недостатком данного технического решения. Кроме того, при включении в работу любого из гидроцилиндров рабочего оборудования машины при подводе рабочей среды от насоса, например в поршневые полости гидроцилиндров ковша, давление слива рабочей среды действует одновременно во всех штоковых полостях гидроцилиндров ковша, заслонки и задней стенки, что также снижает надежность работы гидроцилиндров и гидропривода машины и является недостатком этого технического решения. Технической задачей, которую решает данное техническое предложение, является расширение функциональных возможностей силовых распределителей при уменьшении их количества, снижении нагруженности гидроцилиндров и времени на включение их в работу. Эта задача решена благодаря тому, что известное техническое решение, принятое в качестве прототипа, снабжено силовым распределителем с двумя каналами выхода для рабочей среды и системой (например, гидравлического) силового воздействия на золотник, включающей две камеры управления, блок питания низкого давления и блоки дистанционного управления с системой (например, ручного) включения с двумя командными гидролиниями, гидролинией питания и слива, а также снабжено дополнительными гидрозамками двухстороннего действия с двумя каналами входа и выхода рабочей среды, гидрозамками одностороннего действия, включающими камеру управления и канал входа и вы хода для рабочей среды. При этом количество блоков дистанционного управления и дополнительных гидрозамков двухстороннего действия каждого из них равно количеству гидроцилиндров, приводимых в движение рабочее оборудование машины, а односторонних гидрозамков составляет в два раза больше. Причем блок питания низкого давления соединен с гидролинией питания каждого блока дистанционного управления, а сливными гидролиниями соединены с масляным баком. При этом левые командные гидролинии каждого блока дистанционного управления соединены с полостями управления гидрозамков одностороннего действия, каналы выхода которых сообщены со штоковыми полостями гидроцилиндров ковша, заслонки и задней стенки. Одновременно эти же командные гидролинии каждого блока дистанционного управления через первые соответствующие каналы входа и вы хода гидрозамков двухстороннего действия совместно соединены с левой камерой системы гидравлического силового воздействия на золотник силового распределителя. Правые командные гидролинии каждого блока дистанционного управления также соединены с полостями управления гидрозамков одностороннего действия, каналы выхода которых сообщены с поршневыми полостями гидроцилиндров ковша, заслонки и задней стенки. Одновременно эти же командные гидролинии каждого блока дистанционного управления через вторые соответствующие каналы входа и выхода гидрозамков двухстороннего действия совместно соединены с правой камерой системы гидравлического силового воздействия на золотник силового распределителя. Причем один из каналов выхода для рабочей среды от силового распределителя соединен исполнительными гидролиниями через каналы входа и вы хода гидрозамков одностороннего действия со штоковыми, а второй канал выхода для рабочей среды от силового распределителя - с поршневыми полостями гидроцилиндров рабочего оборудования ковша, заслонки и задней стенки из условия минимума потерь давления в гидроприводе и затрат времени на приведение в действие рабочего оборудования. Введенные конструктивные отличия в предлагаемое техническое решение обуславливают: расширение функциональных возможностей силовых распределителей и уменьшение их количества за счет снабжения гидропривода машины блоками дистанционного управления с системой ручного включения и дополнительными гидрозамками двухстороннего действия, по числу, равному числу гидроцилиндров рабочего оборудования, а гидрозамков одностороннего действия по числу в два раза большему числу гидроцилиндров рабочего оборудования, а также использования одного силового распределителя с двумя каналами выхода, для рабочей среды и системой гидравлического силового воздействия на золотник, включающей две камеры управления и блок питания низкого давления, что обеспечивает включение в работу от одного насоса: большого числа гидроцилиндров рабочего оборудования машины; снижение нагруженности гидроцилиндров за счет перекрытия доступа рабочей среды в полости гидроцилиндров, не выполняющих рабочих функций, посредством использования гидрозамков одностороннего действия, соединенных с одним из каналов выхода для рабочей среды от силового распределителя; снижение времени на включение гидроцилиндров в работу за счет минимального пути движения рабочей среды до полостей гидроцилиндров ввиду расположения непосредственно вблизи гидроцилиндров гидрозамков одностороннего действия, обеспечивающих пропуск рабочей среды от насоса через один из каналов выхода силового распределителя при положении золотника в рабочей позиции; снижение энергозатрат в процессе работы машины за счет снижения до минимума потерь давления в гидроприводе при включении в работу одного или одновременно двух и более гидроцилиндров от одного силового распределителя ввиду уменьшения количества местных и линейных сопротивлений на пути движения рабочей среды от насоса до рабочих поршневых или штоковых полостей гидроцилиндров. В отличие от прототипа при подаче рабочей среды к одному или двум и более гидроцилиндрам, предназначенным для выполнения индивидуального вида работ и обеспечивающим движение, например, ковша или ковша и задней стенки или одновременно ковша, задней стенки и заслонки, достигается включением в работу только одного силового распределителя, связанного гидравлически с насосом. При этом смещение золотника силового распределителя в рабочую позицию обеспечивается введением в рабочее состояние блоков дистанционного управления системой включения, направляющих гидравлический сигнал от блока питания низкого давления в одну из камер гидравлического силового воздействия на золотник силового распределителя через каналы входа и выхода гидрозамков двухстороннего действия и одновременно направляющих этот сигнал в камеры управления гидрозамками одностороннего действия, что является существенным отличием данного технического решения от прототипа. Одновременное включение в работу гидроцилиндров ковша, задней стенки и заслонки, выполняющих индивидуальные виды работ, всего одним силовым распределителем приводит к уменьшению энергетических затрат (в частности, топлива для мобильных гидрофицированных машин или электроэнергии для стационарных гидрофицированных установок) за счет снижения потерь давления на пути движения рабочей среды от насоса к рабочим полостям гидроцилиндров и от нерабочих полостей гидроцилиндров на слив в масляный бак, что также является существенным отличием данного технического решения от прототипа. При этом в данном техническом решении и в прототипе одноименные полости гидроцилиндров, например их штоковые полости, сообщены исполнительными гидролиниями друг с др угом. Отличием данного технического решения от прототипа является то, что сообщение одноименных полостей гидроцилиндров происходит только при подаче гидравлических сигналов одновременно в камеры управления гидрозамков одностороннего действия от блока питания низкого давления через блоки дистанционного управления. Это обеспечивает подачу рабочей среды в те полости гидроцилиндров, гидрозамки одностороннего действия которых открыты под действием гидравлического сигнала, поданного в их камеры управления и защиту при этом других полостей гидроцилиндров от действия высокого рабочего давления, что способствует снижению нагруженности полостей гидроцилиндров, не участвующих в полезной работе, и тем самым снижению нагруженности гидропривода, а следовательно повышению работоспособности машины в целом. Кроме того, в отличие от прототипа в данном техническом решении существенно возрастет быстродействие включения в работу гидроцилиндров рабочего оборудования последующих двух независимых механизмов машины по отношению к гидроцилиндру первого механизма машины, предварительно находящегося во включенном состоянии, ввиду того, что к гидрозамкам одностороннего действия, расположенным вблизи гидроцилиндров, уже подведена рабочая среда под высоким давлением за счет включения в работу одного из гидроцилиндров. Это способствует повышению производительности работы машины. В предлагаемом техническом решении одним силовым распределителем можно управлять практически любым количеством гидроцилиндров и ограничением может служить поиск оптимума между конструктивными, технологическими и производственными затратами и затратами, связанными с эксплуатацией гидропривода машины, решение от прототипа не обнаружено. На чертеже представлена гидравлическая схема гидропривода машины с системой ручного включения блоков дистанционного управления. Гидропривод машины содержит масляный бак 1, насос 2, параллельно которому установлен предохранительный клапан 3. Последовательно насосу 2 подключен силовой распределитель 4 с правой 5 и левой 6 камерами гидравлического силового воздействия на золотник, а параллельно насосу 2 подключен блок питания низкого давления 7. Распределитель 4 сливной магистралью соединен с масляным баком 1 через фильтр 8. У силового распределителя 4 один из каналов выхода 9 для рабочей среды соединен исполнительными гидролиниями через каналы входа и выхода гидрозамков одностороннего действия 10, 11 и 12 со штоковыми полостями гидроцилиндров 13 ковша, 14 заслонки и 15 задней стенки, а второй канал выхода 16 рабочей среды соединен исполнительными гидролиниями через каналы входа и выхода гидрозамков одностороннего действия 17, 18 и 19 с поршневыми полостями, упомянутых выше гидроцилиндров. Одноименные полости параллельно работающих гидроцилиндров 13 ковша соединены через гидрозамок двухстороннего действия 20 с двумя каналами входа и выхода рабочей среды. Причем штоковые полости обоих гидроцилиндров 13 соединены друг с другом через гидравлические тормозные устройства 21, включающие в себя обратный клапан и дроссель. Одновременно поршневые полости гидроцилиндров 13 ковша соединены посредством каналов входа и вы хода гидрозамка двухстороннего действия 20 с поршневой полостью гидроцилиндра 14 заслонки через обратный клапан 22 и управляемый перепускной клапан 23, камера управления которого сообщена со штоковыми полостями гидроцилиндров 13 ковша через соответствующие каналы входа и выхода гидрозамка двухстороннего действия 20, а также гидравлические тормозные устройства 21. Гидропривод машины включает в себя также три блока дистанционного управления 24, 25 и 26 с системой ручного включения, содержащих у каждого по две командные гидролинии, соответственно, левые 27, 29 и 31, и правые 28, 30 и 32, а также общую гидролинию питания 33, соединенную с блоком питания низкого давления 7, и общую гидролинию слива 34, соединенную с масляным баком 1 через фильтр 8. Каждый из блоков дистанционного управления 24, 25 и 26 своими левыми и правыми командными гидролиниями 27, 28, 29, 30, 31 и 32 соединены с двумя, соответственно, с левыми и правыми каналами входа трех дополнительных гидрозамков двухстороннего действия 35, 36 и 37, левые выходы которых соединены совместно с камерой 5, а правые выходы гидрозамков двухстороннего действия 35, 36 и 37 соединены совместно с камерой 6 гидравлического силового воздействия на золотник силового распределителя 4. Одновременно левые и правые командные гидролинии 27,28, 29, 30, 31 и 32 блоков дистанционного управления 24, 25 и 26 соединены с камерами управления односторонних гидрозамков 10, 11, 12, 17, 18 и 19. Причем левые командные гидролинии 27, 29 и 31 блоков дистанционного управления 24,25 и 26 соединены с камерами управления односторонних гидрозамков 10, 11 и 12, каналы выхода которых сообщены со штоковыми полостями гидроцилиндров 14 заслонки, 15 задней стенки и 13 ковша, а правые командные гидролинии 28, 30 и 32 соединены с камерами управления односторонних гидрозамков 17, 18 и 19, каналы выхода которых сообщены с поршневыми полостями упомянутых выше гидроцилиндров. Принцип работы гидропривода машины с системой ручного включения блоков дистанционного управления заключается в следующем. При нейтральном положении золотника силового распределителя 4, как показано на чертеже, рабочая среда направляется на слив через фильтр 8 в масляный бак 1, а также поступает к блокам дистанционного управления с ручным включением 24,25 и 26 по гидролинии питания 33 от блока питания низкого давления 7. При этом насос 2 развивает давление, необходимое для действия после блока питания низкого давления 7 гидравлического сигнала, достаточного для смещения золотника и включения в работу правой или левой позиции силового распределителя 4 при одновременном включении одного из блоков дистанционного управления 24, 25 или 26. Так, при включении одного из блоков дистанционного управления с ручным управлением, например 26, гидравлический сигнал от блока питания низкого давления 7, гидролинии питания 33 и командной гидролинии 31 поступает по двум направлениям: первое, на вход гидрозамка двухстороннего действия 37 и из его выхода поступает в левую камеру 5 гидравлического силового воздействия на золотник силового распределителя 4; второе, гидравлический сигнал поступает в камеру управления гидрозамка одностороннего действия 12, что приводит к открытию прохода для рабочей среды через каналы входа и выхода данного гидрозамка. В результате подачи гидравлического сигнала в камеру 5 гидравлического силового воздействия на золотник включается в работу левая позиция силового распределителя 4. Это приводит к тому, что основной поток рабочей среды от насоса 2 поступает к выходному каналу 9 силового распределителя 4, а затем к гидрозамкам одностороннего действия 10, 11 и 12. Ввиду предварительного открытия каналов входа и выхода гидрозамка одностороннего действия 12 за счет подачи в его камеру управления гидравлического сигнала рабочая среда поступает в штоковые полости гидроцилиндров 13 через каналы входа и выхода гидрозамка одностороннего действия 12, а также через соответствующие каналы входа и выхода гидрозамка двухстороннего действия 20 и далее через тормозные устройства 21, обеспечивающие в данном направлении свободный проход для рабочей среды. Смещение золотника силового распределителя 4 вправо, приводит к тому, что рабочая среда из камеры 6 вытесняется через открытые каналы входа и выхода гидрозамка двухстороннего действия 37 и командную гидролинии 32, в данном случае работающей в качестве сливной, и далее через сливную гидролинию 34 и фильтр 8 поступает на слив в масляный бак 1. В то же время рабочая среда, подаваемая в штоковые полости гидроцилиндров 13 от насоса 2, обеспечивает подъем ковша машины. Вследствие наличия механической связи между гидроцилиндрами 13 и 14, то есть заслонки и ковша, подъем гидроцилиндров 13 ковша, приводит к тому, что через рычажную систему они воздействуют на гидроцилиндр 14 заслонки. В результате чего штоковая полость гидроцилиндра 14 заслонки работает в насосном режиме, обеспечивая подвод дополнительного количества рабочей среды в штоковую полость гидроцилиндров 13 ковша. Так, дополнительное количество рабочей среды, создаваемое работой в насосном режиме гидроцилиндра 14. из штоковой полости этого гидроцилиндра под действием давления поступает через каналы гидрозамка одностороннего действия 10, преодолевая сопротивление рабочей среды, давление которой определяется давлением действующим в штоковых полостях гидроцилиндров 13 ковша. Далее рабочая среда от гидрозамка одностороннего действия 10 через каналы гидрозамка одностороннего действия 12, находящегося в открытом состоянии, суммируется с подачей от насоса 2 и поступает в штоковые полости гидроцилиндров 13. В результате это го увеличивается скорость обратного хода штока гидроцилиндров 13, а следовательно скорость подъема ковша машины. Давление рабочей среды, действующее в штоковых полостях гидроцилиндров 13, также действует в камере управления управляемого перепускного клапана 23, гидравлически гидролинией связанной с этими полостями гидроцилиндров, что приводит к открытию клапана 23. Это, в свою очередь приводит к тому, что вытесняемая рабочая среда из поршневых полостей гидроцилиндров 13 через соответствующие каналы входа и вы хода гидрозамка 20 распределяется по двум направлениям. Одно из них, рабочая среда направляется через обратный клапан 22 и управляемый перепускной клапан 23 в поршневую полость гидроцилиндра 14 заслонки, исключая в поршневой полости этого гидроцилиндра разрежение, а второе через каналы гидрозамка одностороннего действия 19 и далее на слив в масляный бак 1 через канал выхода 16 силового распределителя 4 и фильтр 8. Подъем ковша осуществляется до полного втягивания штоков гидроцилиндров 13, то есть до упора поршней в крышки цилиндров, что приводит к росту да вления до величины срабатывания предохранительного клапана 3. В результате сброса рабочей среды через предохранительный клапан 3 обеспечивается защита от разрушения насоса 2 и гидропривода машины в целом. Таким образом, при включении в работу блока дистанционного управления 26, обеспечивающим подачу рабочей среды в штоковые полости гидроцилиндров 13, высокое давление развиваемое насосом 2 действует только в упомянутых полостях, а механическая связь между гидроцилиндрами 13 и 14 при одновременном наличии между ними гидравлической связи исключает дополнительную конструктивную нагруженность металлоконструкции машины и способствует устранению образования разрежения в поршневой полости гидроцилиндра 14, что обеспечивает повышение надежности работы гидропривода и машины в целом. В случае одновременного включения в работу блоков дистанционного управления 25 и 26 и подаче гидравлических сигналов по левым командным гидролиниям 29 и 31 от блока питания низкого давления 7 характер движения рабочей среды от насоса 2 к штоковым полостям гидроцилиндров 13 будет аналогичным вышеприведенному. Отличием в этом случае является то, что рабочая среда от насоса 2 поступает не только в штоковые полости гидроцилиндров 13, но и в штоковую полость гидроцилиндра 15 через каналы гидрозамка одностороннего действия 11 за счет подачи в камеру управления этого гидрозамка гидравлического сигнала по командной гидролинии 29. Тогда, из поршневой полости гидроцилиндра 15 рабочая среда будет поступать на слив в масляный бак 1 через каналы гидрозамка одностороннего действия 18, обеспечивающего свободный в этом направлении проход для рабочей среды, а затем через второй канал выхода 16 силового распределителя 4 и фильтр 8. При этом правые командные гидролинии 30 и 32 блоков дистанционного управления с ручным включением 25 и 26 работают в качестве сливных. В случае же включения блока дистанционного управления 24, при включенных блоках дистанционного управления 25 и 26, и подаче гидравлического сигнала по командной гидролинии 27 в камеру управления гидрозамка одностороннего действия 10, обеспечивающего в результате этого его открытие. Тогда, рабочая среда будет поступать от насоса 2 также в штоковую полость гидроцилиндра 14 через каналы гидрозамка одностороннего действия 10. При этом принцип работы гидроцилиндров 13 и 15 будет аналогичным вышеприведенному. Вытесняемая рабочая среда из поршневой полости гидроцилиндра 14 будет поступать на слив в масляный бак 1 через каналы гидрозамка одностороннего действия 17, обеспечивающего в этом направлении движения свободный ее проход, а затем рабочая среда будет поступать на слив через второй канал выхода 16 силового распределителя 4 и фильтр 8. При этом командная гидролиния 28 блока дистанционного управления 24 работает в качестве сливной. Из приведенного следует, что при включении каждого в отдельности или одновременно двух или трех блоков дистанционного управления 24, 25 и 26 и подаче гидравлических сигналов по командным гидролиниям 27, 29 и 31, рабочая среда от насоса 2 направляется только в штоковые полости гидроцилиндров 13, 14 и 15. В этих случаях золотник силового распределителя 4 находится в одном положении, обеспечивающем пропуск рабочей среды только в штоковые полости гидроцилиндров 13, 14 и 15 от насоса 2, а из поршневых полостей упомянутых гидроцилиндров рабочая среда поступает на слив в масляный бак 1, что способствуе т снижению потерь времени на подвод рабочей среды в поршневые или штоковые полости гидроцилиндров. Поскольку рабочая среда от насоса 2 к полостям гидроцилиндров 13, 14 или 15, то есть непосредственно к гидрозамкам одностороннего действия 10, 11 и 12 или 17, 18 или 19, подводится одновременно при включении хотя бы одного из блоков дистанционного управления 24, 25 или 26, которые, в свою очередь, включают в работу одну из позиций золотника силового распределителя 4. Это способствует повышению производительности выполнения работы за счет сокращения времени цикла работы гидрофицированной машины. Следует также заметить, что в случае одновременного включения в работу двух и более гидроцилиндров, приводимых в движение различное рабочее оборудование машины, достигается снижение уровня забросов давления при возрастании внешних нагрузок на рабочее оборудование и соответственно гидроцилиндры. Так, в случае возрастания нагрузки на штоке, например, первого гидроцилиндра при неизменной на втором, скорость штока первого снижается, а второго увеличивается. Штоки этих гидроцилиндров перемещаются обратно пропорционально внешним нагрузкам. Этим достигается также повышение надежности работы машины за счет снижения уровня давления в гидроприводе при включении от одного насоса и силового распределителя одновременно двух и более гидроцилиндров. Опускание ковша обеспечивается при подаче рабочей среды от насоса 2 в поршневые полости гидроцилиндров 13. Для этого включается в работу блок дистанционного управления 26 и тогда гидравлический сигнал от блока питания низкого давления 7 подается через правую командную гидролинию 32, по которой гидравлический сигнал поступает по двум направлениям. По одному из них он поступает в камеру 6 гидравлического силового воздействия на золотник силового распределителя 4 через соответствующие каналы входа и выхода гидрозамка двухстороннего действия 37, а по второму - в камеру управления гидрозамка одностороннего действия 19, обеспечивая открытие его каналов. Подача гидравлического сигнала в камеру 6 силового распределителя 4 приводит к смешению его золотника в левую сторону. При этом включается в работу правая позиция силового распределителя 4, а объем рабочей среды из камеры 5 вытесняется через соответствующие каналы входа и выхода гидрозамка двухстороннего действия 37, командную гидролинию 31, работающей в качестве сливной, затем поступает по гидролинии 34 и фильтр 8 в масляный бак 1. Смещение золотника силового распределителя 4 приводит к тому, что рабочая среда от насоса 2 через силовой распределитель 4 поступает по каналу выхода 16 одновременно к гидрозамкам одностороннего действия 17, 18 и 19. В результате открытия гидрозамка одностороннего действия 19, вызванного подачей гидравлического сигнала в его камеру управления, рабочая среда от насоса 2 поступает только в поршневые полости гидроцилиндров 13 через каналы упомянутого гидрозамка и соответствующие каналы входа и выхода гидрозамка двухстороннего действия 20, что приводит к опусканию ковша машины. Вытесняемая рабочая среда из штоковых полостей гидроцилиндров 13 поступает через тормозные устройства 21. обеспечивающие заданную скорость опускания ковша машины. Далее, рабочая среда поступает на слив через соответствующие каналы входа и выхода гидрозамка одностороннего действия 12, обеспечивающего в этом направлении ее свободный проход, затем канал выхода 9 силового распределителя 4 и фильтр 8 поступает в масляный бак 1. Из приведенного следует, что при включении блока дистанционного управления 26 и подачи гидравлического сигнала по командной гидролинии 32 в камеру 6 силового распределителя 4 рабочая среда от насоса 2 через силовой распределитель 4 и его выходной канал 16 подводится одновременно к гидрозамкам 17. 18 и 19. Однако рабочая среда проходит только через каналы входа и вы хода гидрозамка 19, находящегося в открытом состоянии ввиду подачи гидравлического сигнала только к данному гидрозамку, что также приводит к разгрузке от действия высокого давления поршневые полости других гидроцилиндров, в данном случае задней стенки и заслонки. Таким образом, достигается повышение надежности работы гидроцилиндров и гидропривода машины в целом. При отключении блока дистанционного управления 26, то есть при прекращении подачи гидравлического сигнала по командной гидролинии 32, приводит к прекращению подачи рабочей среды от насоса 2 в поршневые полости гидроцилиндров 13 и, следовательно, к остановке процесса опускания ковша машины. Включение блока дистанционного управления 25 и подачи гидравлического сигнала по командной гидролинии 30 приводит к тому, что этот сигнал поступает одновременно по двум направлениям. По первому направлению гидравлический сигнал поступает в камеру 6 гидравлического силового воздействия на золотник силового распределителя 4 через каналы входа и выхода гидрозамка двухстороннего действия 36, а по второму направлению гидравлический сигнал поступает в камеру управления гидрозамка одностороннего действия 18, что приводит к открытию его каналов. В результате этого рабочая среда от насоса 2 поступает в поршневую полость гидроцилиндра 15 задней стенки через предварительно открытые каналы входа и вы хода гидрозамка одностороннего действия 18. Вытесняемая рабочая среда из штоковой полости гидроцилиндра 15 поступает через каналы входа и выхода гидрозамка одностороннего действия 11, обеспечивающего в этом направлении свободный проход для нее, а затем рабочая среда через канал выхода 9 силового распределителя 4 и фильтр 8 направляется на слив в масляный бак 1. В случае ситуации, когда блок дистанционного управления 26 находится во включенном состоянии и гидравлический сигнал поступает по командной гидролинии 32 и одновременно с блоком 26 включен в работу блок дистанционного управления 25, от которого гидравлический сигнал поступает по командной гидролинии 30, то время необходимое для включения в работу гидроцилиндра 15 будет минимальным. Поскольку золотник силового распределителя 4 находится уже во включенном положении и для поступления рабочей среды в поршневую полость гидроцилиндра 15 необходимо ей пройти минимальный участок от канала входа и вы хода гидрозамка одностороннего действия 18 до поршневой полости гидроцилиндра 15, что способствует повышению производительности выполнения работ данной машиной. При включении в работу блока дистанционного управления 24, одновременно с блоками 25 и 26 находящимися во включенном состоянии, и подачи гидравлического сигнала по командной гидролинии 28 приводит к открытию каналов гидрозамка одностороннего действия 17. Тогда, рабочая среда через каналы входа и выхода гидрозамка одностороннего действия 17 будет поступать от насоса 2 в поршневую полость гидроцилиндра 14, а вытесняемая рабочая среда из штоковой полости поступает на слив в масляный бак 1 через гидрозамок одностороннего действия 10, обеспечивающий свободный проход рабочей среды в этом направлении, канал выхода 9 силового распределителя 4 и фильтр 8. При обобщении вышеприведенного следует, что при включении блоков дистанционного управления 24, 25 и 26, обеспечивающих включение одной из позиций силового распределителя 4, рабочая среда поступает одновременно ко всем поршневым или штоковым полостям гидроцилиндров 13, 14 и 15 рабочего оборудования машины, выполняющих разные функциональные действия от одного источника гидравлической энергии, то есть насоса 2, что свидетельствует о расширении функциональных возможностей силовых распределителей при одновременном уменьшении их количества. Из этого также следует, что включать в работу можно индивидуально каждый механизм машины или совместно два и более механизмов машины при подаче рабочей среды одновременно только в поршневые или только в штоковые полости гидроцилиндров 13, 14 и 15 от одного силового распределителя 4. Такой подход включений гидроцилиндров от одного силового распределителя принят из условия минимума потерь давления в гидроприводе и затрат времени на приведение в действие рабочего оборудования машины, что приводит к снижению энергозатрат и повышению надежности работы и производительности машины. Следует заметить, что в ряде случаев рационально использовать вместо блоков дистанционного управления с системой ручного включения блоков дистанционного управления с системой электрического включения. Использование блоков дистанционного управления с системой электрического включения позволяет увеличить расстояние от пульта управления до силового распределителя, а также создать удобства для управления машиной. Кроме того, в ряде случаев также рационально осуществить замену силовых распределителей с системой гидравлического силового воздействия на золотник на силовые распределители с системой электрического, электрогидравлического, пневматического или электропневматического силового воздействия на золотник, которые допускают более высокий расход рабочей среды и более высокое рабочее давление, что позволяет снизить металлоемкость гидропривода машины. На основании данного технического решения разработан экспериментальный образец гидропровода машины. Созданный образец гидропровода машины подтвердил работоспособность этого предложения.
ДивитисяДодаткова інформація
Назва патенту англійськоюHydraulic drive of earth-moving machine
Автори англійськоюRemarchuk Mykola Parfeniiovych, Sarakhmanov Dmytro Dmytrovych, Vlasov Oleksandr Ivanovych, Zorina Olena Vasylivna
Назва патенту російськоюГидропривод землеройной машины
Автори російськоюРемарчук Николай Парфеньевич, Сарахманов Дмитрий Дмитриевич, Власов Александр Иванович, Зорина Елена Васильевна
МПК / Мітки
МПК: E02F 9/22
Мітки: гідропривод, машини, землерийної
Код посилання
<a href="https://ua.patents.su/6-16977-gidroprivod-zemlerijjno-mashini.html" target="_blank" rel="follow" title="База патентів України">Гідропривод землерійної машини</a>
Гідропривод землерийної машини

Номер патенту: 15668
Опубліковано: 30.06.1997
Автори: Магерамов Лютфалін Курбан Алійович, Лізунов Костянтин Михайлович, Ковальов Анатолій Миколайович, Большаков Анатолій Костянтинович
Мітки: землерийної, машини, гідропривод
Формула / Реферат:
(57) Гидропривод землеройной машины, включающий регулируемый гидронасос, сообщенный трубопроводом высокого давления с первым предохранительным клапаном и гидромотором ходоуменьшителя, и соединенный через второй предохранительный кпапан с баком подпиточный гидронасос, соединенный с баком и через предохранительное устройство с входом регулируемого гидронасоса, гидроцилиндры навесного оборудования, соединенные с гидрораспределителями, напорная...
Гідропривод одноковшового екскаваторанавантажувача

Номер патенту: 3208
Опубліковано: 26.12.1994
Автори: Ханох Петро Мойсейович, Лесик Василь Сергійович, Захаров Борис Миколайович, Пивовар Павло Миколайович
МПК: E02F 9/22
Мітки: гідропривод, екскаваторанавантажувача, одноковшового
Формула / Реферат:
1. Гидропривод одноковшового экскаватора-погрузчика, содержащий насосы, гидробак, первую группу гидродвигателей, подключенный к первой группе гидродвигателей первый гидрораспределитель с двумя проточными каналами с противоположным направлением потока рабочей жидкости, вход одного из которых сообщен с первым насосом, а другого - со вторым насосом, отличающийся тем, что гидропривод снабжен второй группой гидродвигателей и подключенным к ней...
Гідропривод

Номер патенту: 15750
Опубліковано: 30.06.1997
Автори: Оренбойм Борис Данилович, Салтан Сергій Семенович
МПК: F15B 11/00
Мітки: гідропривод
Формула / Реферат:
(57) 1. Гидропривод, содержащий дифференциальный силовой цилиндр, поршневая и штоковая полости которого сообщены с распределителем и через разгрузочный клапан, включающий в себя корпус и подпружиненный золотник, сообщены между собой и со сливной магистралью, отличающийся тем, что золотник разгрузочного клапана выполнен со штоком, выступающим из корпуса, подпружинен с двух сторон и установлен в корпусе с образованием золотниковой и штыковой...
Гідропривод затвора гідромашини

Номер патенту: 15724
Опубліковано: 30.06.1997
Автори: Линецький Наум Гершович, Ушомирський Боріс Аронович, Міхно Микола Іванович, Андреєв Віктор Борисович, Іванов Сергій Васильович, Прес Давид Мойсейович, Веремеєнко Ігор Степанович
МПК: F03B 11/00, F15B 11/00
Мітки: гідромашини, затвора, гідропривод
Формула / Реферат:
(57) 1. Гидропривод затвора гидромашины, включающий запорное кольцо, содержащий установленные по окружности кольца и обеспечивающие его подъем, удержание и опускание и соединенные с ним тягами силовые и синхронизирующие равнополостные гидроцилиндры, последние притом объединены в замкнутую последовательную цепь, в которой разноименные полости каждого гидроцилиндра сообщены с разноименными полостями двух соседних синхронизирующих...
Гідропривод бурового верстата
Номер патенту: 15591
Опубліковано: 30.06.1997
Автори: Пярн Микола Миколайович, Строна Сергій Григорович, Кудинов Валерій Олександрович, Харченко Федір Савич
МПК: E21B 3/00
Мітки: верстата, бурового, гідропривод
Формула / Реферат:
Гидропривод бурового станка, включающий гидропатроны, рабочие полости которых гидравлически соединены с одним из выходов гидрораспределителя для управления гидропатронами, гидроцилиндры подачи, штоковые полости которых гидравлически соединены с одним из выходов гидрораспределителя для управления гидроцилиндрами подачи, а поршневые полости которых гидравлически соединены через параллельно установленные клапан давления и обратный клапан со...
Попередній патент: Гідропривод вантажопідйомного пристрою
Наступний патент: Пристрій для термічної обробки харчових продуктів
Випадковий патент: Силовий напівпровідниковий прилад з притискними контактами (варіанти)