Гідропривід робочого обладнання фронтального навантажувача
Номер патенту: 20745
Опубліковано: 07.10.1997
Автори: Семененко Ігор Олександрович, Пивовар Павло Миколайович, Проскурін Валерій Олексійович, Коропець Евген Миколайович, Щербаков Михайло Григорович, Лещинський Валерій Вікторович
Формула / Реферат
1. Гидропривод рабочего оборудования фронтального погрузчика, содержащий основной источник питания рабочей жидкости, гидробак, органы ручного управления, гидроцилиндры привода рабочего органа и стрелы, гидрораспределители управления упомянутых гидроцилиндров с подпружиненными золотниками, кинематически соединенными с первым и вторым органами ручного управления рабочим органом и стрелой, а также гидролиниями подключенные к основному источнику питания, к гидробаку и к рабочим полостям пщроцнлиндров привода рабочего органа и стрелы, следящий рычажно-шарнирный механизм, один конец которого шарнирно связан с приводом рабочего органа, а другой — посредством своих тяг и поворотных рычагов связан с золотником пщро-распределптеля управления гидроцилиндра привода рабочего органа, отличающийся тем, что он снабжен гидравлическим логическим блоком управления выравнивания рабочих органов, например ковша или вилочного захвата, и возврата их в исходное положение со своим источником питання, подключенным к основному источнику питания, гидрораспределитель управления гидроцилиндров привода стрелы выполнен четырехпозиционным с устройством 4і"ксации плавающего положения стрелы, а гидрораспределитель управления гидроцилиндра привода рабочего органа имеет торцовую полость управления смещения золотника с нейтрального положения, также снабжен гпдроцилиндром изменения длины одной из тяг следящего рычажно-шарнирного механизма, штоковая полость которого гидравлически подключена к упомянутому источнику питания логического блока управления, а поршневая полость - к первому выходу того же блока управления и к торцовой полости управления смещения золотника, шарнирно соединенного с первым органом ручного управления рабочим органом, первый вход логического блока управления кинематически связан со вторым органом ручного управления стрелой, второй вход его -кинематически связан со стрелой с возможностью передачи управляющего воздействия от нес на фиксацию ее транспортного положения, третий и четвертый входы - соединены с третьим и четвертым органами ручного управления включения плавающего положения стрелы и работы с вилочным захватом соответственно, второй выход - гидролинией соединен с устройством фиксации плавающего положения стрелы.
2. Гидропривод по п. 1, отличающийся тем, что ' гидравлический логический блок управления выравнивания рабочих органов и возврата их в исходное положение включает первый, второй, третий и четвертый дискретные двухпозиционные гидрораспределители, причем гидравлический вход первого дискретного гидрораспределителя через третий дискретный гидрораспределитель подключен гидролиниями к источнику питания логического блока управления, состоящему из гидроаккумулятора, редукционного, предохранительного и обратного клапанов, причем гидроаккумулятор подключен к основному источнику питания через обратный и редукционный клапаны, выход первого дискретного гидрораспределителя через первый гидравлический вход четвертого дискретного гидрораспределителя подключен к первому выходу блока управления, а через второй дискретный гидрораспределитель подключен к второму выходу логического блока управления, первый - четвертый входы которого соответственно связаны с золотниками первого - четвертого дискретных гидрораспределителей, второй гидравлический вход четвертого дискретного гидрораспределителя подключен к источнику питания логического блока управления, поршневые полости гидроцилиндров привода стрелы соединены с гидрораспределителем управления этих же гидроцилиндров через дроссель с обратным клапаном.
3. Гидропривод по п. 1, отличающийся тем, что следящий рычажно-шарнирный механизм выполнен подпружиненным относительно шасси погрузчика и состоит из первой и второй тяг с толкателями, размещенными в своих тягах с возможностью осевого перемещения, первого, второго, третьего и четвертого поворотных рычагов, шарнирно соединенных с шасси, третьей тяги и четвертой подпружиненной толкающей тяги и тяги изменяемой длины, состоящей из двух стержней, оснащенной охватывающим их корпусом, и гидроцилиндром, гильза которого прикреплена к этому корпусу перпендикулярно стержням, внутри корпуса размещен копир, жестко соединенный со штоком этого гидроцилиндра с возможностью раздвигания и сдвиганиястержней этой подпружиненной тяги, причем первая тяга толкателем шарнирно соединена с приводом рабочего органа, второй конец этой тяги через первый поворотный рычаг шарнирно соединен с одним из стержней тяги изменяемой длины, другой стержень через второй поворотный рычаг соединен со второй тягой с толкателем, который посредством третьего поворотного рычага соединен с третьей тягой, шарнирно соединенной с золотником гидрораспределителя управления гидроцилиндра привода рабочего органа и с первым органом ручного управления, а золотник второго дискретного гидрораспределителя через подпружиненную четвертую толкающую тягу соединен с чствертым поворотным рычагом, содержащим кулачок, взаимодействующий со стрелой или с гидроцилиндром привода стрелы.
Текст
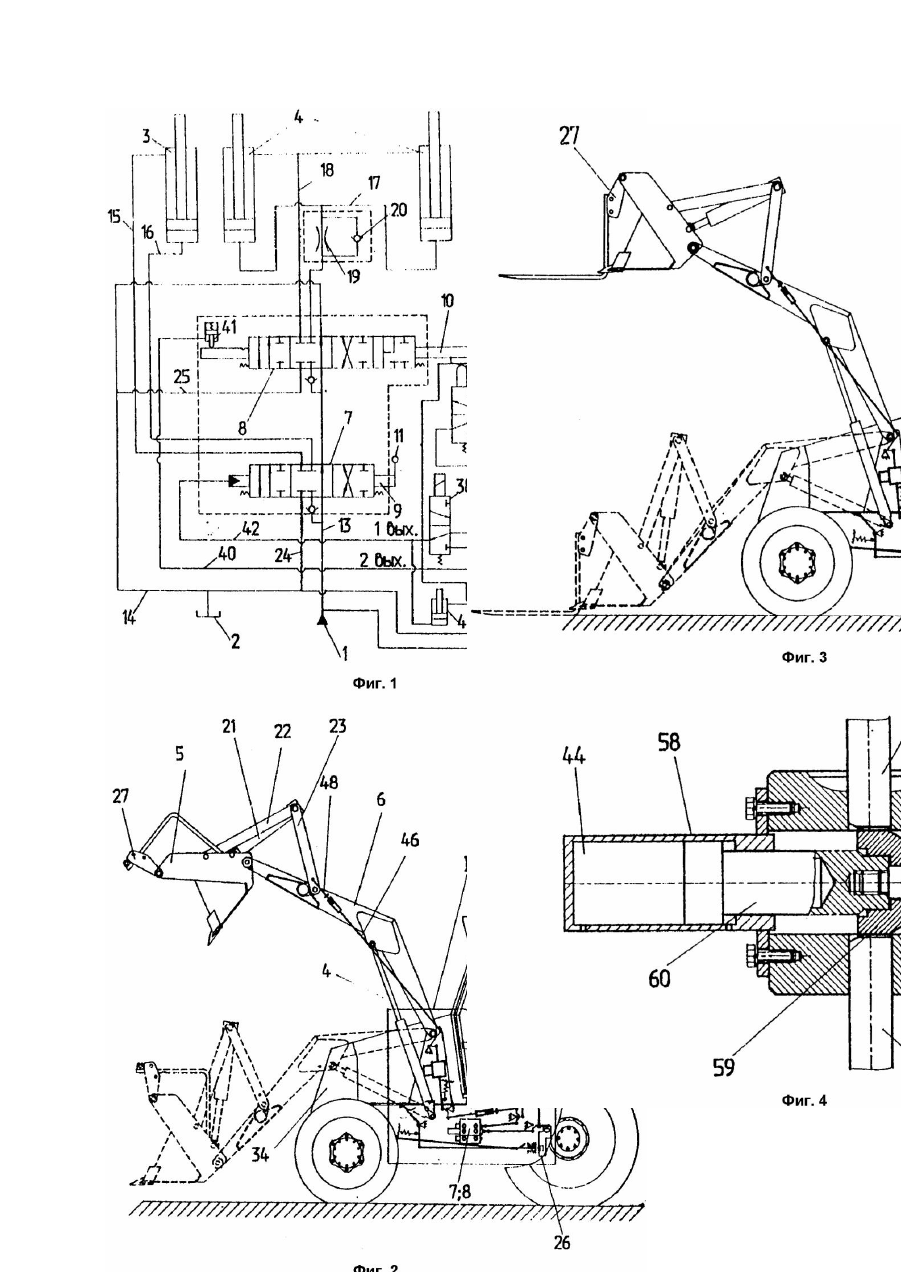
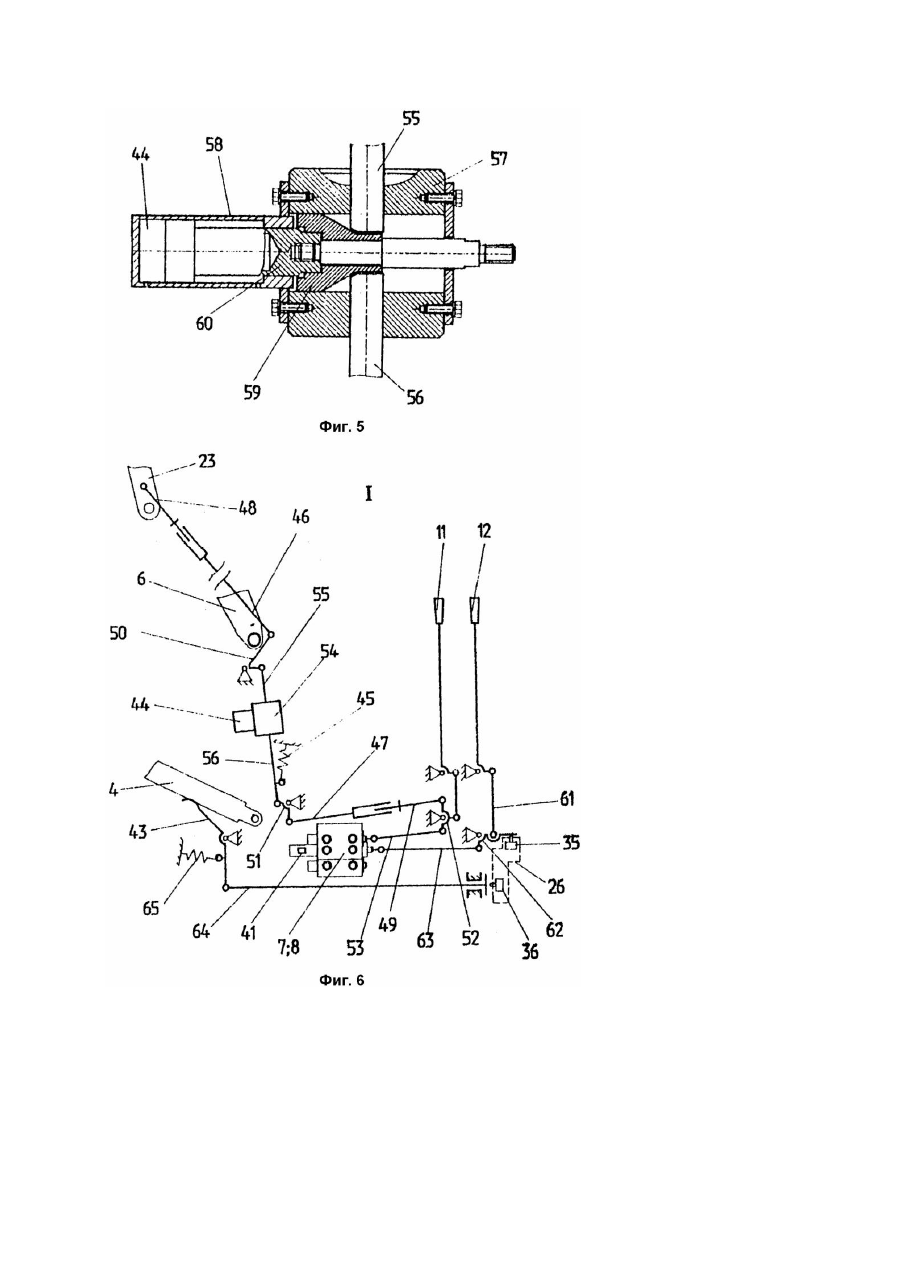
Изобретение относится к машиностроению, а именно к землеройно-транспортным и погрузочноразгрузочным машинам - погрузчикам и их гидромеханическим приводам. Известен привод фронтального погрузчика, включающий гидроцилиндр, гидравлически связанный с ним гидрораспределитель с торцовыми полостями, насос, гидробак и рычажно-шарнирный механизм выравнивания ковша, содержащий последовательно расположенные и кинематически связанные между собой первый толкатель, связанный с гидроцилиндром, первую тягу, первый подпружиненный поворотный рычаг, который расположен с возможностью взаимодействия с ограничительным упором, вторую тягу, второй поворотный рычаг и второй толкатель, соединенный с золотником гидрораспределителя [1]. Основным недостатком этого привода является ограниченные эксплуатационные возможности погрузчика из-за того, что положение ковша, близкое к заданному, у него поддерживается только при подъеме стрелы. Наиболее близким по технической сущности и достигаемому результату является гидропривод рабочего оборудования фронтального погрузчика, содержащий основной источник питания рабочей жидкости, гидробак, гидроцилиндры привода рабочего органа' и стрелы, гидрораспределители управления гидроцилиндров привода рабочего органа и стрелы с подпружиненными золотниками, кинематически соединенными с органами ручного управления рабочим органом и стрелой, а также гидролиниями подключенные к источнику питания, к гидробаку и к рабочим полостям гидроцилиндров привода рабочего органа и стрелы, гидронасос, следящий рычажношарнирный механизм, один конец которого шарнирно связан с гидроцилиндром привода рабочего органа, а другой - посредством своих тяг и поворотных рычагов связан с золотником гидрораспределителя управления гидроцилиндра привода рабочего органа, кроме того, установленный между гидронасосом и гидроцилиндром привода рабочего органа ковша, дополнительный распределитель с гидроуправлением от следящего рычажношарнирного механизма, установленный между гидронасосом и следящим рычажно-шарнирным механизмом гидропереключатель, шток которого при помощи блокирующих кулачков связан с ручкой гидрораспределителя управления гидроцилиндров привода ковша, и блокирующий гидроцилиндр, рабочая полость которого сообщена с выходом гидропереключателя, при этом корпус следящего рычажно-шарнирного механизма шарнирно установлен на портале, а шток при помощи рычагов связан с ковшом [2]. Недостатком этого гидропривода является ограниченные функциональные возможности изза отсутствия средств управления возврата рабочего органа в исходное положение и обеспечения выравнивания другого рабочего органа, в частности вилочного захвата, из-за отсутствия обеспечения управления плоскопараллельным перемещением рабочего органа. В основу изобретения поставлена задача усовершенствовать гидропривод рабочего оборудования фронтального погрузчика путем введения гидравлического логического управления плоскопараллельным перемещением рабочих органов, получения возможности гидравлически изменять длину одной из тяг рычажно-шарнирного механизма и управлять включением плавающего положения стрелы и работы с вилочным захватом, обеспечить выравнивание как ковша, так и другого рабочего органа, в частности - вилочного захвата, поддержание их в положении близком к заданному, а также обеспечить управление возвратом стрелы и ковша (или вилочного захвата) в положение начала работы. Поставленная задача решается тем, что гидропривод рабочего оборудования фронтального погрузчика, содержащий основной источник питания рабочей жидкости, органы ручного управления рабочим органом и стрелой, гидробак, гидроцилиндры привода рабочего органа и стрелы, гидрораспределители управления упомянутых гидроцилиндров с подпружиненными золотниками, кинематически соединенными с первым и вторым органами ручного управления рабочим органом и стрелой, а также гидролиниями подключенные к основному источнику питания, к гидробаку и к рабочим полостям гидроцилиндров привода рабочего органа и стрелы, следящий рычажно-шарнирный механизм, один конец которого шарнирно связан с гидроцилиндром привода рабочего органа, а другой - посредством своих тяг и поворотных рычагов связан с золотником гидрораспределителя управления гидроцилиндра привода рабочего органа, согласно изобретению, снабжен гидравлическим логическим блоком управления выравнивания рабочих органов, например ковша или вилочного захвата, и возврата их в исходное положение со своим источником питания, подключенным к основному источнику питания, гидрораспределитель управления гидроцилиндров привода стрелы выполнен четырехпозиционным с устройством фиксации плавающего положения, а гидрораспределитель управления гидроцилиндра привода рабочего органа имеет торцовую полость управления смещения золотника с нейтрального положения, также снабжен гидроцилиндром изменения длины одной из тяг следящего рычажно-шарнирного механизма, штоковая полость которого гидравлически подключена к упомянутому источнику питания логического блока управления, а поршневая полость - к первому выходу того же блока управления и к торцовой полости управления смещения золотника, шарнирно соединенного с первым органом ручного управления рабочим органом, первый вход логического блока управления кинематически связан со вторым органом ручного управления стрелой, второй вход его - кинематически связан со стрелой с возможностью передачи управляющего воздействия от нее на элемент фиксации ее транспортного положения, третий и четвертый входы - соединены с третьим и четвертым органами ручного управления включения плавающего положения стрелы и работы с вилочным захватом, соответственно, второй выход - гидролинией соединен с устройством фиксации плавающего положения стрелы. Причем гидравлический логический блок управления выравнивания рабочих органов и возврата их в исходное положение включает первый, второй, третий и четвертый дискретные двухпозиционные гидрораспределители, при том гидравлический вход первого из упомянуты х дискретных гидрораспределителей через третий дискретный гидрораспределитель подключен гидролиниями к упомянутому источнику питания логического блока управления, состоящему из гидроаккумулятора, редукционного, предохранительного и обратного клапанов, причем гидроаккумулятор через обратный и редукционный клапаны подключен к основному источнику питания, а первый выход логического блока управления гидролиниями через первый гидравлический вход четвертого дискретного гидрораспределителя подключен к выходу первого дискретного гидрораспределителя, который через второй дискретный гидрораспределитель подключен к второму выходу логического блока управления, первыйчетвертый входы которого соответственно связаны с золотниками первого-четвертого дискретных гидрораспределителей, второй гидравлический вход четвертого дискретного гидрораспределителя подключен к упомянутому источнику питания логического блока управления, поршневые полости гидроцилиндров привода стрелы соединены с гидрораспределителем управления этих же гидроцилиндров через дроссель с обратным клапаном. Кроме того, следящий рычажно-шарнирный механизм выполнен подпружиненным относительно шасси и состоит из первой и второй тяг с толкателями, размещенными в своих тягах с возможностью осевого перемещения, первого, второго, третьего и четвертого поворотных рычагов, шарнирно соединенных с шасси, третьей тяги, четвертой толкающей тяги и тяги изменяемой длины, состоящей из двух стрежней, оснащенной охватывающим их корпусом и гидроцилиндром, прикрепленным к корпусу, перпендикулярно стержням, внутри корпуса размещен, копир, жестко соединенный со штоком этого гидроцилиндра с возможностью раздвигания и сдвигания стержней этой подпружиненной тяги, причем первая тяга толкателем шарнирно соединена с приводом рабочего органа, второй конец этой тяги через первый поворотный рычаг шарнирно соединен с одним из стержней тяги изменяемой длины, другой стержень ее через второй поворотный рычаг соединен со второй тягой с толкателем, который посредством третьего поворотного рычага соединен с третьей тягой, шарнирно соединенной с золотником гидрораспределителя управления гидроцилиндра привода рабочего органа и с первым органом ручного управления, а золотник второго дискретного гидрораспределителя через подпружиненную четвертую толкающую тягу соединен с четвертым поворотным рычагом, содержащим кулачок, взаимодействующий со стрелой или с гидроцилиндром привода стрелы. Причинно-следственная связь между совокупностью существенных признаков заявляемого изобретения и достигаемым техническим результатом проявляется в том, что функцией блока управления выравнивания рабочих органов и возврата их в исходное положение является включение и отключение следящего рычажно-шарнирного механизма для выравнивания вилочного захвата при движении стрелы как вверх, так и вниз и возврата в исходное положение как ковша, так и вилочного захвата. Функцией же следящего рычажно-шарнирного механизма является обеспечение нейтрального положения золотника гидрораспределителя гидроцилиндров привода рабочего органа, при произвольном положении стрелы, когда угол режущей кромки ковша относительно опорной площадки равен 60°, а также возможность коррекции его путем изменения длины тяги гидравлическим путем, когда необходимо обеспечить угол режущей кромки ковша равным 0° относительно опорной площадки для возврата рабочего органа в исходное положение или же для работы с вилочным захватом, вилы которого также должны иметь 0° по отношению к опорной площадке. На фиг.1 представлена гидравлическая схема гидропривода рабочего оборудования фронтального погрузчика; на фиг.2 кинематическая схема рабочего оборудования погрузчика при работе с ковшом в режиме возврата в исходное положение; на фиг.3 кинематическая схема рабочего оборудования погрузчика при работе с вилочным захватом; на фиг.4, 5 - тяга изменяемой длины следящего рычажно-шарнирного механизма в раздвинутом и сдвинутом положениях его стержней; на фиг.6 кинематическая схема следящего рычажношарнирного механизма с гидрораспределителями (выносной элемент I на фиг.2). Гидропривод рабочего оборудования фронтального погрузчика содержит (фиг.1) основной источник питания рабочей жидкости, например насос 1, гидробак2, гидроцилиндры 3, 4 привода рабочего органа (ковша) 5 и стрелы 6 (фиг,1, 2), гидрораспределители 7,8 управления гидроцилиндров 3, 4 привода рабочего органа 5 и стрелы 6 с подпружиненными золотниками 9, 10, кинематически соединенными с первым и вторым органами (рукоятями) 11, 12 ручного управления рабочим органом 5 и стрелой 6, а также гмдролиниями 13, 14, 15, 16, 17, 18 подключенные соответственно к насосу 1, гидробаку 2 и к рабочим полостями гидроцилиндров 3, 4. Подключение гидрораспределителя 8 к паре гидроцилиндров 4 привода стрелы 6 осуществляется посредством гидролинии 17 через дроссель 19 с обратным клапаном 20,Стрела 6 шарнирно соединена с ковшом 5 посредством корпуса 21 гидроцилиндра 3 и тяг 22 и 23. Гидрораспределители 7 и 8 подключены через сливные гидролинии 24,25 к гидробаку 2 (фиг.1). Гидропривод снабжен гидравлическим логическим блоком 26 управления выравнивания рабочего органа ковша 5 или вилочного захвата 27 (фиг.3) и возврата их в исходное положение со своим источником 28 питания, который состоит из гидроаккумулятора 29, редукционного 30, предохранительного 31 и обратного 32 клапанов, причем гидроаккумулятор 29 через обратный 32 и редукционный 30 клапаны подключен к насосу 1 гидролинией 33. Блок 26 жестко закреплен на шасси 34 погрузчика (фиг.2) и включает в себя (фиг.1) первый 35, второй 36, третий 37 и четвертый 38 дискретные гидрораспределители, причем гидравлический вход первого дискретного гидрораспределителя 35 через третий дискретный гидрораспределитель 37 подключен гидролинией 39 к выходу источника 28 питания, к которому также подключен второй гидравлический вход четвертого дискретного гидрораспределителя 38. Выход первого гидрораспределителя 35 через второй гидрораспределитель 36 и через второй выход блока 26 управления гидролинией 40 подключен к устройству 41 фиксации плавающего положения стрелы 6, выполненного, например, в виде подпружиненного гидроцилиндра одностороннего действия, шток которого фиксирует золотник 10 гидрораспределителя 8 в плавающем положении стрелы 6. Выход гидрораспределителя 35 через первый гидравлический вход гидрораспределителя 38 подключен к первому вы ходу блока 26 управления и гидролинией 42 подключен к торцовой полости гидрораспределителя 7. Первый - четвертый входы блока 26 управления связаны с золотниками первого четвертого дискретных гидрораспределителей 3538. Первый вход блока 26 управления кинематически связан с органом 12 ручного управления стрелой 6. Второй вход блока 26 управления кинематически связан с фиксатором траспортного положения стрелы 6, выполненным в виде поворотного рычага 43 с кулачком. Третий и четвертый входы блока 26 управления соединены, например электрически, с третьим и четвертым органами управления включения плавающего положения стрелы 6 и работы с вилочным захватом 27 соответственно (не показаны). Первый выход блока 26 управления также подключен к поршневой полости гидроцилиндра 44 следящего рычажношарнирного механизма, штоковая полость которого подключена к выходу источника 28 питания. Следящий рычажно-шарнирный механизм выполнен подпружиненным относительно шасси 34 пружиной 45 и состоит из (фиг.2, 4, 6) первой 46 и второй 47 тяг с толкателями 48 и 49, установленным в своих тягах с возможностью осевого перемещения, первого 50, второго 51 и третьего 52 поворотных рычагов, третьей тяги 53, и тяги 54 изменяемой длины, включающей стержни 55 и 56 и оснащенной охватывающим стержни 55, 56 корпусом 57 и гидроцилиндром 44, гильза 58 которого жестко прикреплена к корпусу 57 перпендикулярно стержням 55 и 56. Внутри корпуса 57 размещен копир 59, жестко соединенный со штоком 60 гидроцилиндра 44 с возможностью раздвигания и сдвигания стержней 55 и 56. Причем первая тяга 46 своим толкателем 48 шарнирно соединена с тягой 23 привода рабочего органа 5, второй конец тяги 46 через первый поворотный рычаг 50 шарнирно соединен со стержнем 55 тяги 54, стержень 56 через второй поворотный рычаг 51 соединен со второй тягой 47 с толкателем 49, который посредством третьего поворотного рычага 52 соединен с третьей тягой 53, шарнирно соединенной с золотником 9 гидрораспределителя 7 и с рукоятью 11. Первый вход блока 26 управления кинематически связан с рукоятью 12 посредством тяги 61 и поворотного рычага 62, а также с золотником 10 гидрораспределителя 8 посредством тяги 63. Второй вход блока 26 управления кинематически через четвертую толкающую тягу 64, подпружиненную пружиной 65, связан с четвертым поворотным рычагом 43, содержащим кулачок, взаимодействующий со стрелой 6 или с гидроцилиндром 4 привода стрелы 6. Гидропривод рабочего оборудования фронтального погрузчика работает следующим образом. Управление гидрораспределителем 7 привода ковша 5 может осуществляться, например: вручн ую при помощи рукояти 11, поворотного рычага 52, третьей тяги 53; при помощи следящего рычажно-шарнирного механизма; посредством сервоуправления, сигнал для которого поступает с первого выхода логического блока 26. Управление гидрораспределителем 8 привода стрелы 6 осуществляется только вручную при помощи рукояти 12, тяги 61, поворотного рычага 62 и тяги 63. При работе погрузчика ковшом 5, вилочный захват 27 заброшен назад (фиг.2) и зафиксирован известным способом (на чертеже не показано). При манипулировании ковшом 5 у поверхности земли управление золотником 9 гидрораспределигеля 7 осуществляется только вручн ую. Под действием пружины 45 следящий рычажно-шарнирный механизм перемещается влево и ввер х, образуя между толкателями 48, 49 и тягами 46, 47 зазор, вследствие чего имеется возможность свободно манипулировать рукоятью 11. Поршень гидроцилиндра 44 занимает левое положение (фиг.5). При подъеме стрелы 6 и полном подвороте ковша 5 зазор между толкателями 48,. 49 и тягами 46, 47 исчезает, а при дальнейшем подъеме стрелы 6 включается следящий рычажношарнирный механизм. При этом толкатель 48 (фиг.6) торцовой поверхностью, воздействует на тягу 46, поворотный рычаг 50, тягу 54 изменяемой длины, поворотный рычаг 51, тягу 47, толкатель 49, поворотный рычаг 52, тягу 53. Вследствие чего золотник 9 гидрораспределителя 7 под действием тяги 53 смещается влево (фи г,1). Рабочая жидкость от насоса 1 через гидрораспределитель 7 поступает в штоковую полость гидроцилиндра 3 привода ковша 5. В этом случае ковш 5 отворачивается, тяга 23 поворачивается влево, а следящий рычажно-шарнирный механизм под действием пружины 45 перемещается до тех пор, пока золотник 9 гидрораспределителя 7 не вернется в нейтральное положение под действием имеющейся в нем пружины. При этом происходит поворот ковша 5 до тех пор, пока его режущая кромка не достигает положения равного порядка 60° по отношению к линии горизонта. При дальнейшем подъеме стрелы 6 ковш 5 будет занимать такое же положение, обеспечивая безопасную работу и отсутствие просыпания груза. После выгрузки груза в кузов транспортного средства или в отвал, стрела 6 по-прежнему находится в верхнем положении, а ковш 5 - в вывернутом положении (фиг.2). При отъезде, после выгрузки груза, оператор вручную с помощью рукояти 12 через тягу 61, поворотный рычаг 62 и тягу 63 переводит золотник 10 гидрораспределителя 8 в крайнее левое положение. В такое положение золотник 10 фиксируется с помощью устройства 41 фиксации плавающего положения стрелы 6. При этом обе полости гидроцилиндра 4 соединяются с гидробаком 2 и стрела 6 под собственным весом опускается вниз. Посредством рукояти 12 оператор также воздействует на толкатель дискретного гидрораспределителя 35, перемещая его вниз (фиг.1 и 6). Рабочая жидкость от источника 28 питания через гидролинию 39, третий гидрораспределитель 37, первый гидрораспределитель 35, четвертый гидрораспределитель 38, первый выход блока 26 управления поступает в торцовую полость гидрораспределителя 7 управления рабочим органом 5, а также через первый выход блока 2.6 управления в поршневую полость гидроцилиндра 44. Поршень гидроцилиндра 44 перемещается вправо и копир 59 раздвигает стержни 55 и 56, увеличивая длину тяги 54. Рабочая жидкость от источника 1 питания по напорной гидролинии 13 через гидрораспределитель 7 и по напорной гидролинии 18 поступает в поршневую полость гидроцилиндра 3 привода рабочего органа, например ковша 5, - происходит подворот ковша 5. Длина тяги 54 выбирается такой, чтобы обеспечить срабатывание следящего рычажношарнирного механизма, когда режущая кромка ковша 5 достигает положения 0° по отношению к горизонту. При дальнейшем опускании стрелы 6 это положение отслеживается. Параметры дросселя 19 выбираются такими, чтобы обеспечить более ранний подворот ковша, чем стрела опустится до исходного (транспортного) положения, как показано на фиг.2 пунктиром. При достижении стрелой 6 исходного положения гидроцилиндр 4 (или другой элемент) стрелы 6 нажимает на кулачок четвертого поворотного рычага 43 и через четвертую толкающую тягу 64 воздействует на вход второго дискретного гидрораспределителя 36 (фиг.6). При этом рабочая жидкость от блока 28 питания по гидролинии 39 через третий гидрораспределитель 37, через первый гидрораспределитель 35 и через второй гидрораспределитель 36 поступает к второму вы ходу блока 26 управления, и далее по напорной гидролинии 40 поступает к устройству 41 фиксации плавающего положения стрелы 6, которое, например, путем перемещения своего поршня со штоком вверх расфиксирует золотник 10 гидрораспределителя 8, Золотник 10 под действием своих пружин, возвращаясь в нейтральное положение, воздействуе т кинематически через тягу 63 и поворотный рычаг 62 на золотник первого дискретного гидрораспределителя 35 и возвращает его в исходное положение. При этом торцовая полость гидрораспределителя 7 и поршневая полость гидроципиндра 44 через первый выход блока 26 управления, через четвертый гидрораспределитель 38 и через первый гидрораспределитель 35 по сливной гидролинии 14 соединяются с гидробаком 2. А рабочая жидкость с устройства 41 фиксации по гидролинии 40, через второй выход блока 26 управления, второй гидрораспределитель 36 и первый гидрораспределитель 35 по сливной гидролинии 14 поступает в гидробак 2. Так как рабочая жидкость перестает поступать через гидрораспределитель 35 в гидроцилиндр 44 его шток 60 с копиром 59 сдвинется влево (фиг.5) и тяга 54 будет иметь меньшую длину. При этом происходит останов погрузочного устройства в положении показанном пунктиром на фиг.2. При необходимости выполнения планировочных работ отключается блок 26 управления от источника 28 питания путем включения дискретного гидрораспределителя 37 по фиг.1 вниз. При необходимости выполнения работе другим рабочим органом, например с вилочным захватом 27, оператор вручную переводит вилочный захват. 27 в положение, показанное на фиг.3 известным способом. Затем оператор, например, нажатием соответствующей кнопки или рычага управления (четвертый орган ручного управления) переводит четвертый дискретный гидрораспределитель 38 по фиг.1 вниз. Вследствие чего рабочая жидкость от блока 28 питания через второй гидравлический вход четвертого дискретного гидрораспределителя 38 подается к первому выходу блока 26 управления и поступает по гидролинии 42 к торцовой полости гидрораспределителя 7 и в поршневую полость гидроцилиндра 44. Поршень гидроцилиндра 44 смещаеться вправо (фиг.4) и копир 59 раздвигает стержни 55 и 56, увеличивая тем самым длину тяги 54 на величину достаточную для обеспечения положения вилочного захвата 27 параллельно опорной площадке, как это показано на фиг.3. Работает погрузочное оборудование при подъеме с вилочным захватом 27 аналогично работе с ковшом 5, при этом следящий рычажношарнирный механизм вступает в работу при любом положении стрелы 6, чем обеспечивается рабочее положение, близкое к заданному, в любой точке траектории стрелы 6. При опускании стрелы 6 с вилочным захватом 27 следящий рычажно-шарнирный механизм под воздействием пружины 45 смещается влево, а золотник 9 гидрораспределителя 7 под напором рабочей жидкости перемещается вправо до упора в упомянутый рычажно-шарнирный механизм. При этом ковш 5 с вилочным захватом 27 подворачивается, тяга 23 смещается вправо и воздействует на рычажно-шарнирный механизм, под действием которого золотник 9 гидрораспределителя 7 возвращается в нейтральное положение, чем и обеспечивается положение вилочного захвата 27 параллельно опорной площадке, а избыточное давление возникающее при этом в торцовой полости гидрораспределителя 7 компенсируется работой гидроаккумулятора 29 источника 28 питания.
ДивитисяДодаткова інформація
Автори англійськоюScherbakov Mykhailo Hryhorovych, Proskurin Valerii Oleksiiovych, Leschynskyi Valerii Viktorovych, Korolets Yevhen Mykolaiovych, Koropets Evhen Mykolaiovych, Semenenko Ihor Oleksandrovych, Pyvovar Pavlo Mykolaiovych
Автори російськоюЩербаков Михаил Григорьевич, Проскурин Валерий Алексеевич, Лещинский Валерий Викторович, Коропец Евгений Николаевич, Семененко Игорь Александрович, Пивовар Павел Николаевич
МПК / Мітки
МПК: E02F 9/22
Мітки: фронтального, навантажувача, гідропривід, робочого, обладнання
Код посилання
<a href="https://ua.patents.su/6-20745-gidroprivid-robochogo-obladnannya-frontalnogo-navantazhuvacha.html" target="_blank" rel="follow" title="База патентів України">Гідропривід робочого обладнання фронтального навантажувача</a>
Гідроприлад робочого обладнання фронтального навантажувача
Номер патенту: 10700
Опубліковано: 25.12.1996
Автори: Щербаков Михайло Григорович, Семененко Ігор Олександрович, Олексенко Валентин Володимирович, Данілов Олександр Олександрович, Коропець Євген Миколайович, Проскурін Валерій Олексійович, Войтенко Наталія Миколаївна, Пивовар Павло Миколайович
МПК: E02F 9/22
Мітки: навантажувача, обладнання, фронтального, гідроприлад, робочого
Формула / Реферат:
Гидропривод рабочего оборудования фронтального погрузчика, содержащий источник питания рабочей жидкости, гидробак, гидроцилиндры гидропривода рабочего органа и стрелы, имеющие подпружиненные золотники и рукоять управления, дросселирующие гидрораспределители управления гидроприводами рабочего органа и стрелы, подключенные к соответствующим рабочим полостям гидроцилиндров гидропривода рабочего органа и стрелы, к источнику питания и к...
Гідропривод робочого обладнання фронтального навантажувача

Номер патенту: 1169
Опубліковано: 30.12.1993
Автори: Семененко Ігор Олександрович, Домрачев Олександр Федорович, Пивовар Павло Миколайович, Лисенко Володимир Сергійович
МПК: E02F 9/22
Мітки: навантажувача, обладнання, гідропривод, робочого, фронтального
Формула / Реферат:
Формула изобретения1. Гидропривод рабочего оборудования фронтального погрузчика, содержащий насос, гидробак, гидроцилиндры привода ковша и стрелы, имеющий подпружиненный золотник и рукоять управления гидрораспределителя управления ковшом, подключенный к рабочим полостям гидроцилиндра привода ковша, к насосу и к гидробаку, рычажно-шарнирный подпружиненный механизм с упором, имеющий сливные каналы следящий гидромеханизм, подключенный к...
Опорна рама робочого обладнання фронтального навантажувача на базі колісного трактору
Номер патенту: 12899
Опубліковано: 28.02.1997
Автори: Сєргєєв Сергій Гаврилович, Чміленко Анатолій Олександрович, Іванчук Михайло Іванович, Харченко Микола Михайлович, Пінчук Микола Іванович
МПК: E02F 3/76
Мітки: рама, базі, колісного, фронтального, навантажувача, опорна, трактору, обладнання, робочого
Формула / Реферат:
Опорная рама рабочего оборудования фронтального погрузчика на базе колесного трактора, включающая продольные балки с элементами крепления их задних концов на заднем мосте трактора, узлы крепления передних концов продольных балок к раме трактора, поперечную балку, прикрепленную к передним частям продольных балок, и закрепленные на передних концах последних стойки с расположенными на их верхних частях в направлении от вершин к основаниям...
Стріла робочого устаткування фронтального навантажувача
Номер патенту: 6477
Опубліковано: 29.12.1994
Автори: Чміленко Анатолій Олександрович, Кирилюк Анатолій Харитонович, Пінчук Микола Іванович, Сєргєєв Сергій Гаврилович, Харченко Микола Михайлович, Іванчук Михайло Іванович
МПК: E02F 3/36
Мітки: навантажувача, устаткування, робочого, фронтального, стріла
Формула / Реферат:
(57) Стрела рабочего оборудования фронтального погрузчика, включающая продольные углообразные балки с концевыми втулками для шарнирного соединения стрелы соответственно с ковшом и базовой машиной, поперечную балку, жестко прикрепленную торцевыми сторонами к продольным балкам, смонтированные на средних частях продольных балок втулки для шарнирной установки промежуточных треугольников шарнирной связи, расположенных над стрелой, соответственно,...
Стріла робочого устаткування фронтального навантажувача
Номер патенту: 6952
Опубліковано: 31.03.1995
Автори: Пінчук Михайло Іванович, Кирилюк Анатолій Харитонович, Сергєєв Сергій Гаврилович, Чміленко Анатолій Олександрович, Харченко Микола Михайлович, Іванчук Михайло Іванович
МПК: E02F 3/34
Мітки: навантажувача, робочого, фронтального, устаткування, стріла
Формула / Реферат:
Стрела рабочего оборудования фронтального прогрузчика, включающая полые продольные балки углообразной формы с приваренными концевыми втулками для шарнирного соединения стрелы соответственно с ковшом и базовой машиной, полую поперечную балку, котррая жестко прикреплена торцевыми сторонами к продольным балкам, смонтированные на средних частях продольных балок втулки для шарнирной установки промежуточных треугольников шарнирной связи,...
Попередній патент: Оптичний приціл
Наступний патент: Пектиновмісне пиво “університетське”
Випадковий патент: Пристрій для моделювання адаптивного нейрона