Пристрій радіолокаційного розпізнавання об’єктів
Номер патенту: 24164
Опубліковано: 07.07.1998
Автори: Баранов Олександр Миколайович, Краснов Леонід Михайлович, Братішко Микола Федорович, Говоров Валентін Сергійович


Формула / Реферат
Устройство радиолокационного распознавания объектов, содержащее передатчик, приемник, передающую и приемную антенны и последовательно соединенные первый смеситель, первый фильтр нижних частот и устройство воспроизведения образа объекта, причем вход передающей антенны подключен к первому выходу передатчика, второй выход которого подсоединен к первому входу первого смесителя, выход приемной антенны через приемник подключен ко второму входу первого смесителя, отличающееся тем, что оно дополнено последовательно соединенными вторым смесителем, вторым фильтром нижних частот и представляемым генератором, выход которого подключен к первому входу второго смесителя, соединенного вторым своим входом с общей точкой первого фильтра нижних частот и устройства воспроизведения образца объекта.
Текст
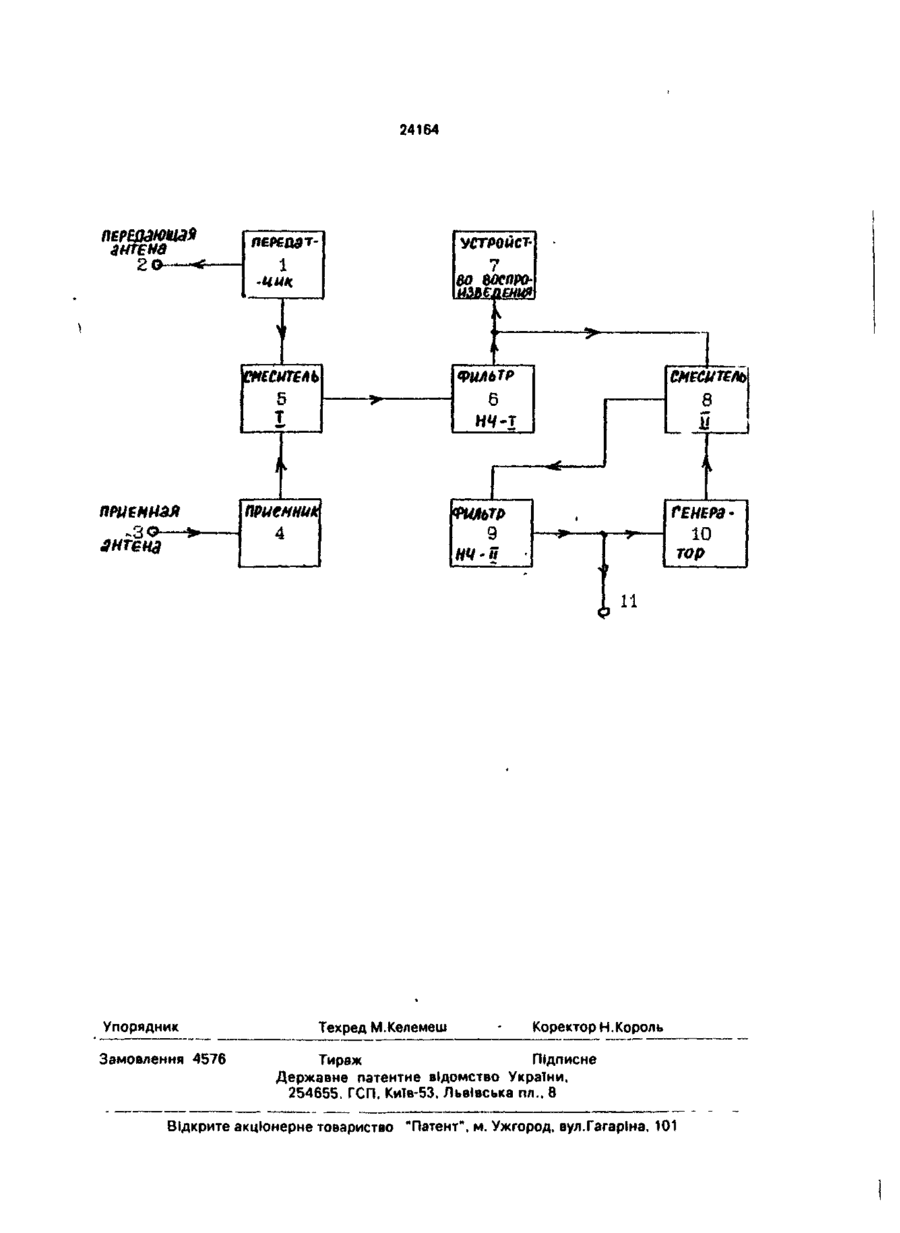
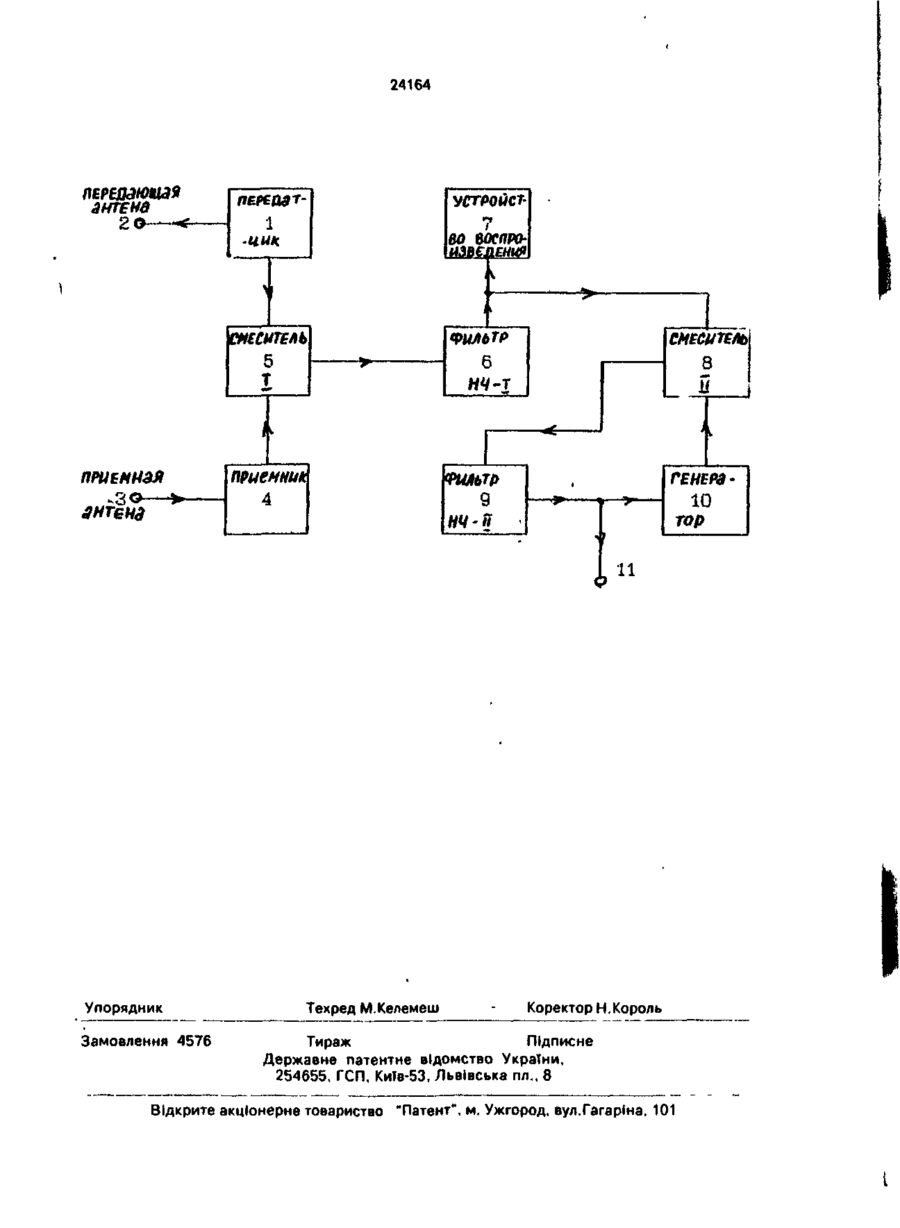
Устройство радиолокационного распознавания объектов, содержащее передатчик, приемник, передающую и приемную антенны и последовательно соединенные первый смеситель, первый фильтр нижних частот и устройство воспроизведения образа объекта, причем вход передающей антенны подключен к первому выходу передатчика, второй выход которого подсоединен к первому входу первого смесителя, выход приемной антенны через приемник подключен ко второму входу первого смесителя, о т л и чающееся гем, что оно дополнено последовательно соединенными вторым смесителем, вторым фильтром нижних частот и представляемым генератором, выход которого подключен к первому входу второго смесителя, соединенного вторым своим входом с общей точкой первого фильтра нижних частот и устройства воспроизведения образца обьекта. Изобретение относится к радиолокации и может быть использовано в когерентных радиолокационных станциях непрерывного излучения для распознавания надводных объектов при наличии помех от фона поверхности и метеообразований. Известно устройство аналогичного назначения, содержащее приемопередатчик радиолокационной станции и канал распознавания [Справочник по радиолокации. Под ред. М. Скольника. В 4 томах. Т. 1, М., Сов. радио, 1976, с. 213, рис. 36]. Основной недостаток этого устройства состоит в низкой надежности распознавания в условиях имитационных помех от угол ковых отражателей, а также не позволяет распознать основной морской объект среди второстепенных. Наиболее близким по технической сущности к изобретению является устройство радиолокационного распознавания объектов, содержащее Передатчик, приемник, передающую и приемную антенны и последовательно включенные смеситель, фильтр нижних частот и устройство воспроизведения образца объекта (в качестве которого могут быть использованы головные телефоны), причем вход передающей антенны подключен к первому выходу передатчика, второй выход которого подсоединен к пер с > 24164 вому входу смесителя, выход приемной аи-, тенны через приемник подключен ко второму входу смесителя [Небабин В. Г , Сергеев В В Методы и техника радиолокационного распознавания М , Сов радио, 1984,с 36, 5 рис 2 2]. Основной недостаток этого устройства состоит в низкой надежности распознавания в условиях имитационных помех от уголковых отражателей, а также не позволяет 10 распознавать основной морской объект среди второстепенных. В основу изобретения "Устройство радиолокационного распознавания объектов" поставлена задача - повышение надежно- 15 сти распознавания основного морского объекта среди второстепенных Эта задача решается тем, что устройство радиолокационного распознавания дополнено последовательно соединенными 20 вторым смесителем, вторым фильтром нижних частот и подстраиваемым генератором, выход которого соединен с первым входом второго смесителя, второй вход которого подключен к общей точке первого фильтра 25 нижних частот и устройства воспроизведения образа объекта, что повышает надежность выделения основного объекта среди второстепенных. Изложенная суть изобретения поясня- 30 ется структурной схемой, изображенной на чертеже. В его состав входят: передатчик 1, передающая антенна 2, приемная антенна 3, приемник 4 и последовательно соединенные первый смеситель 5, первый фильтр 35 нижних частот 6 и устройство воспроизведения образа объекта 7, а также последовательно соединенные второй смеситель 8, второй фильтр нижних частот 9 и подстраиваемый генератор 10, причем вход 40 передающей антенны 2 подключен к первому выходу передатчика 1, второй выход которого подключен к первому входу первого смесителя 5. выход приемной антенны 3 через приемник 4 подключен ко второму 45 входу первого смесителя 5. выход подстраиваемого генератора 10 соединен с первым входом второго смесителя 8, второй вход которого подключен к общей точке первого ФНЧ 6 и устройства воспроизведения обра- 50 за 7. Устройство работает следующим образом Передатчик 1 через антенну 2 излучает зондирующий сигнал 55 (1) где Ui и fo - амплитуда и несущая частота зондирующего сигнала Сложная отражаю 4 щая поверхность морского объекта состоит из N локальных областей рассеяния (ЛОР). В результате качки объекта на взволнованной морской поверхности и его поступательного движения, в эхо-сигнале, отраженном от каждой 1-й ЛОР, создается допплеровская частота fgi - £ УП ' TS, (2) единичный вектор линии визировагдет ния; v t - вектор скорости 1-й ЛОР; До - длина волны зондирующего сигнала. Вектор скорости \/?1-й ЛОР складывается из вектора скорости vt хода объекта и вектора скорости vT Вр , обусловленного вращательным движением объекта на качке: \/ї=^х + йївр. (3) Вектор vTBp МОЖНО представить в виде ^ в Р = n Q if, (4) где п - расстояние 1-й ЛОР от оси вращения объекта: Х\ - единичный орт, направленный перпендикулярно к плоскости, проходящей через ось вращения объекта и центр 1-й ЛОР, Q- угловая скорость вращения объекта, определяемая как производная угла поворота объекта по времени: Q= d /?/dt. Морской объект на качке как динамическая система обладает собственной частотой качки Ц), которая определяется водоизмещением и метацентрическими высотами объекта. При этом изменение угла поворота объекта на качке имеет вид гармонической функции где Ао и Q) - амплитуда и собственная частота качки морского объекта. При этом угловая скорость вращения объекта определяется соотношением: Q( t ) = —£ = Ао Q> C S Q> t. O (6) dt Следовательно доплеровская частота эхосигнала от 1-й ЛОР определяется выражением fgl - у- (V*x + \М В ) ' ї?" р т- (Vxp) + п Ао О> cos є\ cos Q> t). или fgl - І- (Vxp + B| C S Оэ t), O (7) 24164 где Bi ~ пАо Оь cos £i: (8) VXp - радиальная составляющая вектора скорости хода объекта; Е\ - угол между векторами т^ и f f Таким образом эхо-сигнал от сложной отражающей поверхности морского объекта можно записать в следующем виде: S(t) = X Aicos2 л [to + Bi COS Q> t)]t. (V xp (9) Кольцо фазовой автоподстройки частоты (ФАПЧ), в которое входят второй смеситель 8, второй ФНЧ 9 и подстраиваемый генератор 10, обладает определенной полосой захвата £2 г < йвг макс (13) Средняя частота полосы захвата кольца 10 ФАПЧ устанавливается равной среднему значению собственной частоты качки основного объекта Этот сигнал улавливается приемной антенQ г ср = Q о ср (14) ной 3, усиливается приемником 4, поступает 15 на второй вход первого смесителя 5, на перПри этом напряжение на выходе 11 второго вый вход которого со второго выхода переФНЧ 9 в зависимости от ситуации может датчика 2 поступает ослабленная копия принимать два уровня: высокий уровень зондирующего сигнала если основной объект попадает в зону обзо20 ра РЛС, либо низкий уровень - в случае Ui'(t)=Ui'cos2jr f o t . (Ю) отсутствия основного объекта в зоне обзора РЛС. В результате с выхода первого фильтра нижВеличины верхней и нижней границ поних частот (ФНЧ) б снимается напряжение лосы захвата кольца ФАПЧ выбираются так, 25 чтобы в эту полосу попали все собственные N частоты качки основного объекта, соответ(VXp + 2 U\ cos ствующие его различным курсовым углам. і =1 Стабильность средней частоты полосы B\ cos Q o t)t, (11) захвата кольца ФАПЧ обеспечиваетря при30 менением высокостабильного подстраиваекоторое поступает на устройство воспроизмого генератора, а ширина этой полосы ведения образца 7. В устройстве 7 распозчастот задается величиной усиления кольца навание объекта выполняется по ширине фазовой автоподстройки. спектра флуктуации допплеровской частоты Собственная частота качки объекта эхо-сигнала. Одновременное выхода первого ФНЧ 6 напряжение поступает на второй 35 является дополнительным признаком распознавания, использование которого повывход второго смесителя 8, на первый'вход шает надежность распознавания основного которого с выхода подстраиваемого генераобъекта среди второстепенных. тора 10 поступает напряжение Техническое преимущество изобретения перед известным решением выражает(12) 40 Qrt, ся в повышении надежности распознавания основного морского объекта среди второгде Uю и Q r ~ амплитуда и частота напряжестепенных. ния на выходе подстраиваемого генератора. 24164 передающая антена о л
ДивитисяДодаткова інформація
Автори англійськоюKrasnov Leonid Mykhailovych, Baranov Oleksandr Mykolaiovych
Автори російськоюКраснов Леонид Михайлович, Баранов Александр Николаевич
МПК / Мітки
МПК: G01S 13/78
Мітки: розпізнавання, пристрій, об'єктів, радіолокаційного
Код посилання
<a href="https://ua.patents.su/6-24164-pristrijj-radiolokacijjnogo-rozpiznavannya-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій радіолокаційного розпізнавання об’єктів</a>
Пристрій для обчислювання локальних середніх значень
Номер патенту: 15534
Опубліковано: 30.06.1997
Автор: Єлманов Сергій Олександрович
МПК: G06F 17/15
Мітки: обчислювання, пристрій, середніх, локальних, значень
Формула / Реферат:
(57) Устройство для вычисления локальных средних значений, содержащее блок деления, первую строку вычислительных узлов, каждый из которых состоит из двух сумматоров и двух регистров, причем в каждом вычислительном узле выходы первого и второго сумматоров соединены соответственно с информационными входами одноименных регистров, первые входы сумматоров первого вычислительного узла соединены со входом задания нулевого кода устройства, выходом...
Нейрокомп’ютерний пристрій розпізнавання повітряних об’єктів

Номер патенту: 9979
Опубліковано: 30.09.1996
Автори: Кулько Аркадій В'ячеславович, Новіков Володимир Пилипович, Гребенюк Андрій Юрійович, Берека Валерій Веніамінович
МПК: G01S 13/78, G01S 13/02
Мітки: пристрій, розпізнавання, об'єктів, повітряних, нейрокомп'ютерний
Формула / Реферат:
Нейтрокомпьютерное устройство распознавания воздушных объектов, содержащее блок управления, состоящий из последовательно соединенных RS-триггера, второго элемента И, счетчика импульсов, регистра кодов дальности и цифроаналогового преобразователя, выход которого является первым выходом блока управления, последовательно соединенных элемента НЕ, вход которого является первым входом блока управления и соединен с R-входом RS-триггера и входом...
Пристрій для перевірки вимірювачів девіації частоти
Номер патенту: 16166
Опубліковано: 29.08.1997
Автори: Огар Валерій Іванович, Павленко Юрій Федорович
МПК: G01R 23/16, G01R 23/00
Мітки: девіації, вимірювачів, перевірки, пристрій, частоти
Формула / Реферат:
Устройство для поверки измерителей девиации частоты, содержащее управляемый аттенюатор, источник частотно-модулированного сигнала, анализатор спектра, электронно-счетный частотомер, делитель частоты, поверяемый измеритель девиации частоты, делитель частоты, блок памяти, источник модулирующего напряжения, первый выход которого подключен к входу управляемого аттенюатора, управляющий вход которого подключен к первому выходу...
Пристрій розпізнавання жетонів та жетон для використання у пристрої
Номер патенту: 8307
Опубліковано: 29.03.1996
Автори: Тарасов Валерій Петрович, Цибін Сергій Олександрович, Гірняк Орест Михайлович, Вишенчук Ігор Михайлович, Зеленцова Наталья Іллінічна
МПК: G07D 5/00, A44C 21/00
Мітки: пристрій, жетон, пристрої, використання, розпізнавання, жетонів
Формула / Реферат:
1. Устройство распознавания жетонов, содержащее генератор с колебательным контуром, детектор, два элемента И, отличающееся тем, что в него дополнительно введены фильтр, два триггера и два элемента задержки, причем генератор, фильтр и детектор соединены последовательно, выход детектора соединен с S - входом первого триггера и с первым входом первого элемента И, R-входы первого и второго триггеров соединены с шиной сброса, прямой выход...
Пристрій для вимірювання фазового зсуву
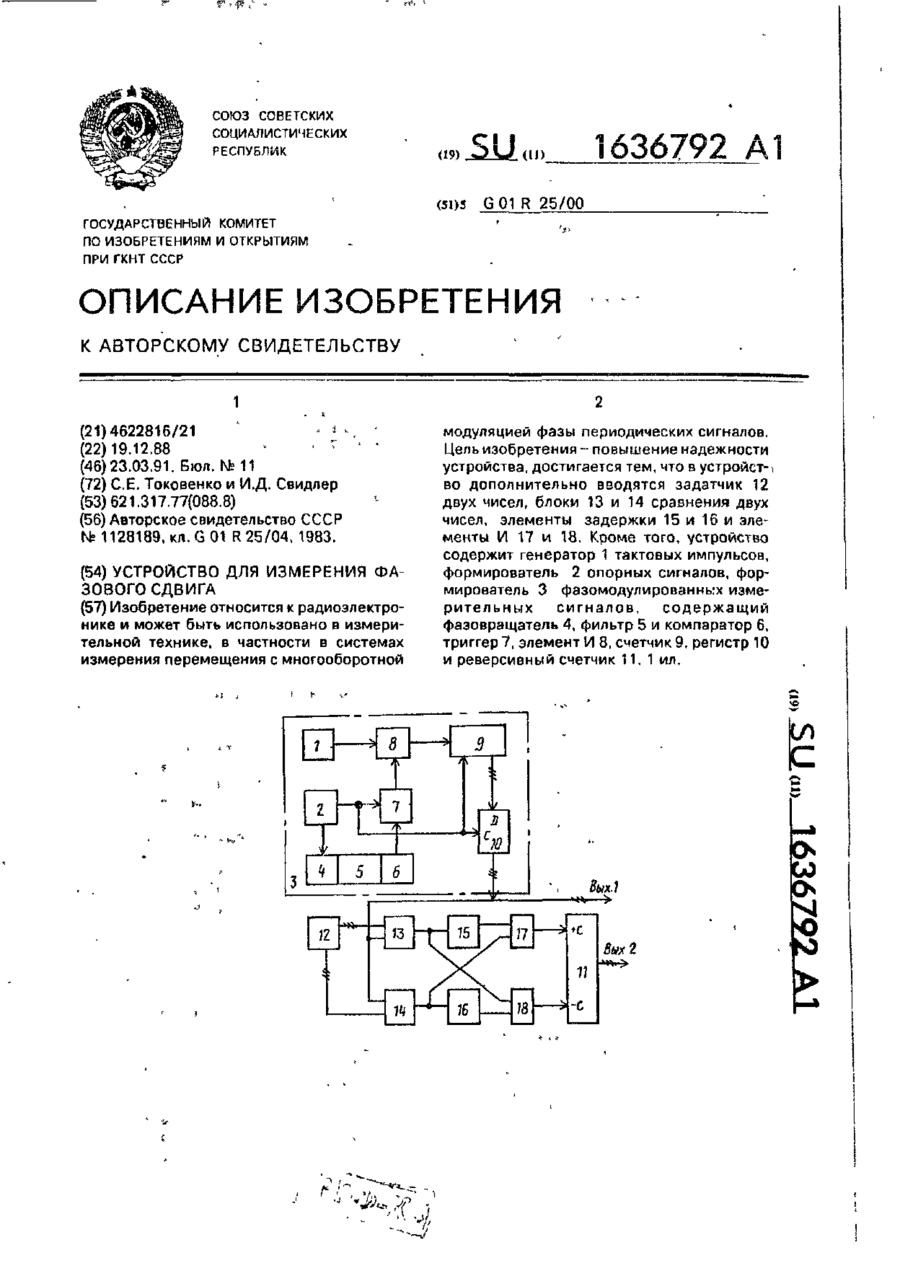
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Свідлер Ігор Давидович, Токовенко Степан Омелянович
МПК: G01R 25/00
Мітки: пристрій, вимірювання, фазового, зсуву
Формула / Реферат:
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Попередній патент: Спосіб формування об’ємних ділянок деталей швейних виробів та пристрій для його здійснення
Наступний патент: Спосіб визначення нітратного екологічного навантаження на організм людини
Випадковий патент: Спосіб ампліфікації сегмента-мішені рнк