Перекітний механізм

Формула / Реферат
1. Перекатной механизм, содержащий два колеса, они расположены в одной плоскости, оси колес между собой соединены траверсой, цилиндрические поверхности колес расположены с возможностью контакта с опорной плоскостью, отличающийся тем, что на цилиндрических поверхностях колес расположено два ролика, оси роликов между собой соединены второй траверсой, с возможностью нагружения колес через два ролика от второй траверсы прижимающей к опорной плоскости силой, перпендикулярной опорной плоскости, причем ролики расположены таким образом, что проекции на опорную плоскость, при проецировании перпендикулярно опорной плоскости, осей роликов не совмещены с осями колес.
2. Перекатной механизм по п. 1, отличающийся тем, что первый ролик расположен на внешней цилиндрической поверхности первого колеса, второй ролик расположен на внешней цилиндрической поверхности второго колеса, и проехции на опорную плоскость, при проецировании перпендикулярно опорной плоскости, или проекции осей роликов расположены между проекций осей колес, или проекции осей колес расположены между проекций осей роликов.
3. Перекатной механизм по п. 1, отличающийся тем, что первый ролик расположен на внутренней цилиндрической поверхности первого колеса, второй ролик расположен на внутренней цилиндрической поверхности второго колеса, и проекции на опорную плоскость, при проецировании перпендикулярно опорной плоскости, или проекции осей роликов расположены между проекций осей колес, или проекции осей колес расположены между проекций осей роликов.
4. Перекатной механизм по п. 1, отличающийся тем, что первый ролик расположен на внешней цилиндрической поверхности первого колеса, второй ролик расположен на внутренней цилиндрической поверхности второго колеса, и проекции на опорную плоскость, при проецировании перпендикулярно опорной плоскости, или проекция оси первого ролика расположена между проекций осей колес, в то время как проекция оси второго ролика расположена вне участка между проекций осей колес, или проекция оси второго ролика расположена
между проекций осей колес, в то время, как проекция оси первого ролика расположена вне участка между проекций осей колес.
5. Перекатной механизм по п. 1, отличающийся тем, что первый ролик расположен на внешней цилиндрической поверхности первого колеса, второй ролик расположен на внешней цилиндрической поверхности первого колеса, и проекции на опорную плоскость, при проецировании перпендикулярно опорной плоскости, проекция оси первого колеса расположена между проекциями осей роликов.
6. Перекатной механизм по п. 1, отличающийся тем, что первый ролик расположен на внутренней цилиндрической поверхности первого колеса, второй ролик расположен на внутренней цилиндрической поверхности первого колеса, и проекции на опорную плоскость, при проецировании перпендикулярно опорной плоскости, проекция оси первого колеса расположена между проекциями осей роликов.
7. Перекатной механизм по п. 1, отличающийся тем, что первый ролик расположен на внешней цилиндрической поверхности первого колеса, второй ролик расположен на внутренней цилиндрической поверхности первого колеса, и проекции на опорную плоскость, при проецировании перпендикулярно опорной плоскости, проекции осей роликов расположены или между проекций осей колес, или вне участка между проекций осей колес.
Текст
Изобретение относится к механизмам для получения энергии. Общеизвестна тележка, применяемая для горизонтального перемещения грузов по опорной плоскости, содержащая: четыре колеса, оси которых соединены платформой, колеса тележки расположены по парам, одна пара колес расположена вдоль своей оси, параллельной другой оси, вдоль которой расположена другая пара колес, обе оси колес параллельны поперечной оси тележки, два колеса тележки от двух колесных пар расположены в одной плоскости, параллельной другой плоскости, в которой расположены два другие колеса тележки от этих двух колесных пар, указанные две плоскости параллельны продольной оси тележки. С учетом поперечной устойчивости пространственную тележку заменяют плоской тележкой, содержащей два колеса, расположенных в одной плоскости, оси колес соединены траверсой, с возможностью контакта цилиндрическими поверхностями колес с опорной плоскостью, и с возможностью нагружения колес от траверсы прижимающей опорной плоскости силой, перпендикулярной опорной плоскости. При нагружении каждого колеса от траверсы силой, перпендикулярной опорной плоскости, в точке касания колеса с опорной плоскостью возникает реакция опоры, действующая на колесо, направленная перпендикулярно опорной плоскости. Так как величина прижимающей силы и величина реакции опоры равны, и прижимающая сила и реакция опоры действуют по одной прямой но направлены в разные стороны, прижимающая сила и реакция опоры взаимно уничтожаются, в результате чего прижимающая сила и реакция опоры не оказывают влияния на перекатывание колес по опорной плоскости при перемещении траверсы. Общеизвестен автомобиль, предназначенный для самостоятельного перемещения по опорной плоскости, близкой к горизонтальной плоскости, в котором в отличии от рассмотренной тележки колеса выполнены с возможностью возникновения в них крутящих моментов, переданных через трансмиссию от двигателя. Недостатком тележки является отсутствие в колесах тележки возможности возникновения крутящих моментов, перекатывающих колеса по опорной плоскости и перемещающих траверсу вдоль опорной плоскости. В основу изобретения поставлена задача создания перекатного механизма, в котором нагружением каждого колеса прижимающей к опорной плоскости силой, перпендикулярной опорной плоскости, линия действия которой смещена с линии действия реакции опоры на колесо, обеспечивается возникновение крутящего момента в каждом колесе, перекатывающем колесо по опорной плоскости с перемещением траверсы вдоль опорной плоскости, и за счет этого возможно получение механической энергии от прижимающей силы, в том числе и от внутренней сжимающей силы, например, от струбцины. Поставленная задача решается в перекатном механизме, содержащем два колеса, они расположены в одной плоскости, оси колес соединены между собой траверсой, цилиндрические поверхности колес расположены с возможностью контакта с опорной плоскостью, согласно изобретению, на цилиндрических поверхностях колес расположено два ролика, оси роликов между собой соединены второй траверсой, с возможностью нагружения колес через два ролика от второй траверсы прижимающей к опорной плоскости силой, перпендикулярной к опорной плоскости, причем ролики расположены таким образом, что проекции на опорную плоскость осей роликов не совмещены с проекциями осей колес. Поставленная задача решается в перекатном механизме, содержащем; два колеса, они расположены в одной плоскости, оси колес соединены между собой траверсой, цилиндрические поверхности колес расположены с возможностью контакта с опорной плоскостью, согласно изобретению на цилиндрических поверхностях колес расположено два ролика, оси роликов между собой соединены второй траверсой, с возможностью нагружения колес через два ролика от второй траверсы прижимающей к опорной плоскости силой, перпендикулярной опорной плоскости, причем первый ролик расположен на внешней цилиндрической поверхности, первого колеса, второй ролик расположен на внешней цилиндрической поверхности второго колеса, проекции осей роликов расположены между проекций осей колес, или проекции осей колес расположены между проекций осей роликов. Поставленная задача решается в перекатном механизме, содержащем: два колеса, они расположены в одной плоскости, оси колес соединены между собой траверсой, цилиндрические поверхности колес расположены с возможностью контакта с опорной плоскостью, согласно изобретению на цилиндрических поверхностях колес расположено два ролика, оси роликов между собой соединены второй траверсой, с возможностью нагружения колес через два ролика от второй траверсы прижимающей к опорной плоскости силой, перпендикулярной опорной плоскости, причем первый ролик расположен на внутренней цилиндрической поверхности первого колеса, второй ролик расположен на внутренней цилиндрической поверхности второго колеса, проекции осей роликов расположены между проекциями осей колес, или проекции осей колес расположены между проекций роликов. Поставленная задача решается в перекатном механизме, содержащем: два колеса, они расположены в одной плоскости, оси колес между собой соединены траверсой, цилиндрические поверхности колес расположены с возможностью контакта с опорной плоскостью, согласно изобретению на цилиндрических поверхностях колес расположено два ролика, оси роликов между собой соединены второй траверсой, с возможностью нагружения колес через два ролика от второй траверсы прижимающей к опорной плоскости силой, перпендикулярной к опорной плоскости, причем первый ролик расположен на внешней цилиндрической поверхности первого колес, второй ролик расположен на внутренней цилиндрической поверхности второго колеса, при проецировании перпендикулярно опорной плоскости, проекция оси первого ролика расположена между проекциями осей колес, в то время, как проекция оси второго ролика расположена вне участка между проекциями осей колес, или проекция оси второго ролика расположена между проекциями осей колес, в то время как проекция оси первого ролика расположена вне участка между проекциями осей колес. Поставленная задача решается в перекатном механизме, содержащем: два колеса, они расположены в одной плоскости, оси колес между собой соединены траверсой, цилиндрические поверхности колес расположены с возможностью контакта с опорной плоскостью, согласно изобретения на цилиндрических поверхностях колес расположено два ролика, оси роликов между собой соединены второй траверсой, с возможностью нагружения колес через два ролика от второй траверсы прижимающей к опорной плоскости силой, перпендикулярной опорной плоскости, причем первый ролик расположен на внешней цилиндрической поверхности первого колеса, второй ролик расположен на внешней цилиндрической поверхности первого колеса, проекция оси первого колеса расположена между проекциями осей роликов. Поставленная задача решается в перекатном механизме, содержащем: два колеса, они расположены в одной плоскости, оси колес соединены между собой траверсой, цилиндрические поверхности колес расположены с возможностью контакта с опорной плоскостью, согласно изобретению на цилиндрических поверхностях колес расположено два ролика, оси роликов между собой соединены второй траверсой, с возможностью нагружения колес через два ролика от второй траверсы прижимающей к опорной плоскости силой, перпендикулярной к опорной плоскости, причем первый ролик расположен на внутренней цилиндрической поверхности первого колеса, второй ролик расположен на внутренней цилиндрической поверхности первого колеса, проекция оси первого колеса расположена между проекций осей роликов. Поставленная задача решается в перекатном механизме, содержащем: два колеса, они расположены в одной плоскости, оси колес соединены между собой траверсой, цилиндрические поверхности колес расположены с возможностью контакта с опорной плоскостью, согласно изобретению на цилиндрических поверхностях колес расположено два ролика, оси роликов между собой соединены второй траверсой, с возможностью нагружения колес через два ролика от второй траверсы прижимающей к опорной плоскости силой, перпендикулярной к опорной плоскости, причем первый ролик расположен на внешней цилиндрической поверхности первого колеса, второй ролик расположен на внутренней цилиндрической поверхности первого колеса, и проекции на опорную плоскость, при проецировании перпендикулярно опорной плоскости, проекции осей роликов расположены или между проекциями осей колес, или вне участка между проекций осей колес. На фиг.1 - 10 показаны варианты перекатного механизма; на фиг.11 - 14 - варианты составного механизма; на фиг.15 - двигатель постоянного рабочего потенциала. Перекатный механизм (фиг.1) содержит: два колеса, колесо 1, и колесо 2, они расположены в одной плоскости, оси колес 1, 2 соединены между собой траверсой 3, цилиндрические поверхности колес 1, 2 расположены с возможностью контакта с опорной плоскостью 4, на цилиндрических поверхностях колес 1, 2 расположено два ролика 5, 6, оси роликов 5, 6 между собой соединены траверсой 7, с возможностью нагружения колес 1, 2 через два ролика 5, 6 от траверсы 7 прижимающей к опорной плоскости 4 силой, перпендикулярной опорной плоскости 4, причем ролик 5 расположен на внешней цилиндрической поверхности колеса 1, ролик 6 расположен на внешней цилиндрической поверхности колеса 2, и проекции на опорную плоскость 4, при проецировании перпендикулярно опорной плоскости 4, проекции осей роликов 5, 6 расположены между проекций осей колес 1, 2. Перекатный механизм по фиг.1 работает следующим образом. При нагружении траверсы 7 силой P по линии, расстояние от которой до оси ролика 5 равно l1, и расстояние от которой до оси ролика 6 равно l2 , при угле а между нормалью опорной плоскости 4 и линией соединяющей центр ролика 5 с центром колеса 1, равным 45°, и угле b между нормалью опорной плоскости 4 и линией соединяющей центр ролика 6 с центром колеса 2, равным 45°, сила P распределена между роликами 5, 6 следующим образом: на ролик 5 действует сила P1 на ролик 6 действует сила P2 Причем как сила P1, так и сила P2 перпендикулярны опорной плоскости 4. Силу P1 действующую с ролика 5 на колесо 1 уравновешивает реакция колеса 1 в точке касания ролика 5 с колесом 1, которая направлена по линии соединяющей центры колеса 1 и ролика 5, в результате чего воздействие ролика 5 на колесо 1 можно заменить силой F1, направленной по линии, соединяющей центры ролика 5 и колеса 1, приложенной к центру колеса 1, Силу F1 в свою очередь можно представить суммой сил, одна из которых сила N1 нормальная, она прижимает колесо 1 и опорной плоскости 4, другая - сила T1 тангенциальная, она перекатывает колесо 1 вдоль опорной плоскости 4 В свою очередь на колесо 2 действует другая сила T2 Так как сила T1 перекатывающая колесо 1 в одну сторону, и сила T2 перекатывающая колесо 2 в противоположную сторону, а колеса 1, 2 между собой соединены траверсой 3, сила T перекатывающая перекатной механизм равна Таким образом регулировка величины и направления перекатывающей силы T может быть осуществлена смещением линии приложения прижимающей силы P. На фиг.2 показан вариант перекатного механизма, отличающийся от перекатного механизма по фиг.1 тем, что ролики расположены таким образом, что проекции на опорную плоскость осей колес расположены между проекций осей роликов. На фиг.3 показан вариант перекатного механизма, отличающийся от перекатного механизма по фиг.1 тем, что ролики расположены на внутренних цилиндрических поверхностей колес. На фиг.4 показан вариант перекатного механизма, отличающийся от перекатного механизма по фиг.2 тем, что ролики расположены на внутренних цилиндрических поверхностях колес. На фиг.5 показан перекатный механизм, отличающийся от перекатного механизма по фиг.1 тем, что первый ролик расположен на внешней цилиндрической поверхности первого колеса, второй ролик расположен на внутренней цилиндрической поверхности второго колеса, и проекция на опорную плоскость оси первого ролика расположена между проекций осей колес, в то время, как проекция оси второго ролика расположена вне участка между проекциями осей колес. На фиг.6 показан перекатный механизм, отличающийся от перекатного механизма по фиг.5 тем, что проекция оси второго ролика расположена между проекциями осей колес, в то время как проекция оси первого ролика расположена вне этого участка. На фиг.7 показан перекатный механизм, отличающийся от перекатного механизма по фиг.1 тем, что первый ролик расположен на внешней цилиндрической поверхности первого колеса, второй ролик расположен на внешней цилиндрической поверхности первого колеса, и проекции на опорную плоскость оси первого колеса расположена между осями роликов. На фиг.8 показан перекатный механизм, отличающийся от перекатного механизма по фиг.7 тем, что ролики расположены на внутренней цилиндрической поверхности первого колеса. На фиг.10 показан перекатный механизм, отличающийся от перекатного механизма по фиг.1 тем, что первый ролик расположен на внешней цилиндрической поверхности первого колеса, второй ролик расположен на внутренней цилиндрической поверхности первого колеса, и проекции на опорную плоскость осей роликов расположены между проекциями осей колес. На фиг.9 показан перекатный механизм, отличающийся от перекатного механизма по фиг.9 тем, что проекции осей роликов расположены вне этого участка. Работа всех вариантов перекатных механизмов аналогична работе перекатного механизма по фиг.1. Любой из вариантов перекатного механизма самостоятельно работать не может, так как в нем возникает крутящий момент, поворачивающий траверсу роликов, что нарушает кинематические связи между колесами и роликами. Перекатный механизм может работать только в составе составного механизма, в котором крутящие моменты, возникающие в траверсах роликов взаимно уничтожаются. На фиг.11 показан составной механизм, содержащий: два перекатных механизма 1, траверсы роликов которых связаны между собой траверсой 2, колеса перекатных механизмов расположены с возможностью контакта с опорной плоскостью 3, с возможностью нагружения перекатных механизмов 1 от траверсы 2 прижимающей силой P, перпендикулярной опорной плоскости 3, в качестве перекатного механизма 1 взят перекатный механизм по фиг.1, причем траверса 2 с траверсами роликов перекатных механизмов 1 соединена таким образом, что перекатывающие силы в перекатных механизмах 1 направлены в одну сторону. На фиг.12 показан составной механизм, содержащий: колесо 1, связанное с колесом 2 траверсой 3, колеса 1, 2 расположены в одной плоскости, колесо 1, 2 расположены с возможностью контакта с опорной плоскостью 4, на внешней цилиндрической поверхности колеса 1 расположено два ролика 5, оси роликов 5 соединены траверсой 6, на внешней цилиндрической поверхности колеса 2 расположено два ролика 7, оси роликов 7 соединены траверсой 8, траверсы 6, 8 соединены траверсой 9, с возможностью нагружения колес 1, 2 через ролики 5, 7 траверсы 6, 8 от траверсы 9 прижимающей силой P, перпендикулярной опорной плоскости 4. Составной механизм по фиг.12 работает следующим образом. Колеса 1, 2, траверса 3, ролики 5, траверса 6 можно рассматривать как перекатный механизм по фиг.7, колеса 1, 2, траверса 3, ролики 7, траверса 8 можно рассматривать как второй перекатный механизм по фиг.7. Перекатные механизмы между собой соединены траверсой 9, и от нее нагружены прижимающей силой P. Составной механизм по фиг.12 работает аналогично составному механизму по фиг.11. На фиг.13 показан вариант составного механизма, содержащий: два перекатных механизма 1, которые установлены по обе стороны путевого полотна 2, один с одной стороны (сверху другой с другой стороны (снизу), траверсы двух перекатных механизмов связаны струбциной 3, в качестве перекатного механизма 1 использован перекатной механизм по фиг.1. Составной механизм по фиг.13 работает за счет затягивания винтовой пары струбцины 3, в результате чего два перекатных механизма 1 прижаты с двух сторон к путевому полотну 2, крутящие моменты, возникающие в траверсах роликов перекатных механизмов 1 взаимно уничтожаются. На фир.14 показан составной механизм, содержащей: перекатный механизм 1, колеса которого поставлены на путевое полотно 2, с другой стороны путевого полотна 2 расположено два ролика 3, ролики 3 между собой соединены траверсой 4, траверса 4 соединена с траверсой роликов перекатного механизма 1 винтовой парой 5, с возможностью затягивания винтовой пары 5, прижимающей перекатный механизм 1 с одной стороны путевого полотна 2 и роликов 3 с другой стороны путевого полотна 2. Составной механизм по фиг.14 работает аналогично составному механизму по фиг.13. Крутящий момент в траверсе роликов перекатного механизма 1 уравновешен моментом, возникающим в траверсе 4 за счет разного усилия прижатия роликов 3 к путевому полотну 2. Представленными вариантами перечень составных механизмов, включающих или один или два перекатных механизма, не ограничен. Возможно получение 120 вариантов составных механизмов, включающих или один или два перекатных механизма (наиболее простые составные механизмы). Кроме того возможно получение составных механизмов, включающих более двух перекатных механизмов. В представленных составных механизмах при нагружении от внутренних статических сил возникает динамическая сила, перемещающая составные механизмы или вдоль бесконечного прямолинейного путевого полотна или вдоль бесконечной опорной плоскости, однако механическую энергию указанных составных механизмов использовать не представляется возможным. Получение механической энергии возможно только при движении механизмов или возвратно-поступательно, или по замкнутой линии, последнее реализуется в двигателе постоянного рабочего потенциала. Двигатель постоянного рабочего потенциала (смотреть фиг.15) содержит: четыре конических колеса 1, оси колес 1 попарно связаны между собой двумя траверсами 2, конические поверхности колес 1 поставлены на конические торцевые поверхности опорной шайбы 3, причем с каждой стороны шайбы 3 расположено по два колеса 1, в каждой паре колеса 1 расположены симметрично относительно оси шайбы 3, на конических поверхностях каждого колеса 1 расположено по два ролика 4, причем колеса 1 и ролики 4 установлены таким образом, что вершины конических поверхностей колес 1 с одной стороны шайбы 3, и вершины конических поверхностей роликов 4 смежных колес 1 и вершина конической поверхности, шайбы 3, примыкающая к указанным колесам 1 совмещены, оси каждой пары роликов 4 примыкающих к одному колесу 1 соединены между собой траверсой 5, четыре траверсы 5 соединены с основанием 6, с возможностью сжатия колесами 1 торцевых поверхностей шайбы 3 через ролики 4, траверсы 5 от основания 6, с возможностью одновременного изменения точек приложения сил от основания 6 на каждую траверсу 5, при регулировке величины и направления крутящего момента. Двигатель постоянного рабочего потенциала работает аналогично составному механизму по фиг.13, но в отличии от него колеса с роликами, траверсами, основанием вращаются вокруг оси опорной шайбы причем опорная шайба не закреплена а неподвижном корпусе. Основание двигателя постоянного рабочего потенциала соответственно выходному валу. Из термодинамики известны гипотезы о возможном существовании тепловых вечных двигателей: двигателя первого рода, и двигателя второго рода. В настоящее время, известны тепловые двигатели: двигатель внутреннего сгорания, и двигатель внешнего сгорания, классифицируемые в термодинамике как двигатель третьего рода, имеющий устройство, которое может быть использовано для характеристики двигателя первого и второго рода. Двигатель первого рода должен являться механизмом циклического действия, в котором потенциал тепловой энергии рабочего тела в цилиндре в процессе цикла преобразуется в механическую энергию, причем потенциал тепловой энергии рабочего тела, расходуемый на механическую энергию, к концу цикла должен быть восстановлен за счет внутренних возможностей двигателя. Двигатель второго рода должен являться механизмом циклического действия, в котором потенциал тепловой энергии рабочего тела в цилиндре в процессе цикла преобразуется в механическую энергию, причем потенциал тепловой энергии, расходуемый на механическую энергию, к концу цикла должен быть восстановлен за счет теплообмена с окружающей средой. Двигатель третьего рода является механизмом циклического действия, в котором потенциал тепловой энергии рабочего тела в цилиндре преобразуется в механическую энергию, причем потенциал тепловой энергии расходуемый на механическую энергию к концу цикла восстанавливается за счет теплообмена с окружающей средой, имеющей меньший потенциал тепловой энергии чем потенциал тепловой энергии рабочего тела в цилиндре, и за счет теплообмена рабочего тела в цилиндре с посторонним источником тепловой энергии, имеющим более высокий потенциал тепловой энергии, двигатель третьего рода работает за счет переноса тепловой энергии от источника тепловой энергии в окружающую среду. В двигателях первого, второго, третьего родов рабочий потенциал в течении цикла изменяется (расходуется на механическую энергию а затем восстанавливается). В двигателе постоянного рабочего потенциала потенциал энергии в процессе цикла не изменяется, следовательно он не является двигателем первого, второго, третьего родов - он является двигателем другого, четвертого рода. Технико-экономический эффект от использования перекатного механизма состоит в расширении функциональных возможностей этого класса механизмов, в том числе и для получения механической энергии.
ДивитисяДодаткова інформація
Автори англійськоюChuhui Volodymyr Leonidovych
Автори російськоюЧугуй Владимир Леонидович
МПК / Мітки
МПК: F01C 9/00
Мітки: механізм, перекітний
Код посилання
<a href="https://ua.patents.su/6-24479-perekitnijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Перекітний механізм</a>
Устрій для піддержування і охолоджування злитка в установці безперервного розливу металів
Номер патенту: 8678
Опубліковано: 30.09.1996
Автори: Плискановський Олександр Станіславович, Ніколаев Геннадій Андрійович, Склярський Григорій Михайлович, Шевченко Анатолій Іванович, Кузнецов Борис Григорович, Лепіхов Леонід Сергійович, Кравченко Геннадій Федорович, Іванченко Іван Федорович, Матюхін Олександр Васильович
МПК: B22D 11/12
Мітки: розливу, піддержування, металів, злитка, установці, безперервного, устрій, охолоджування
Формула / Реферат:
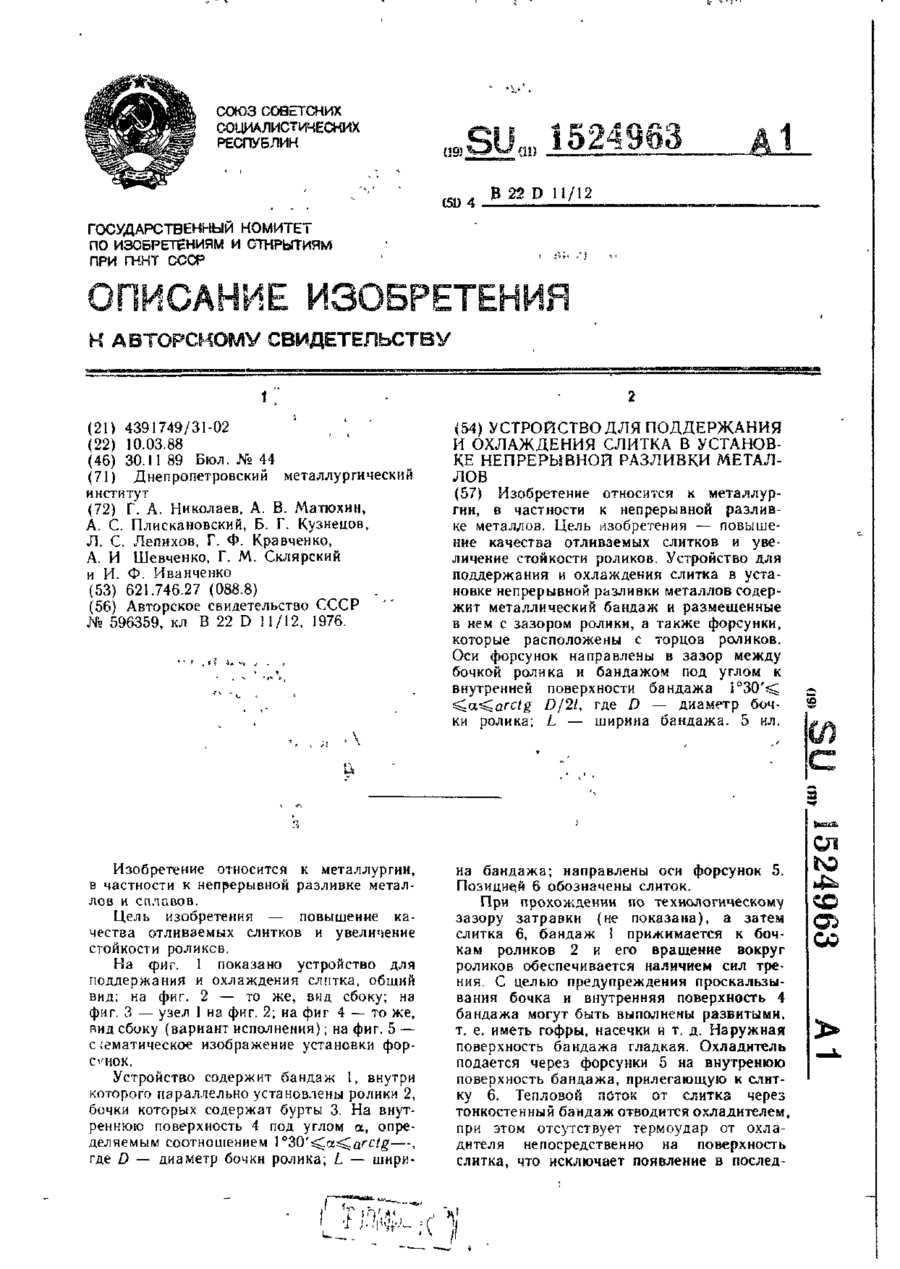
Устройство для поддержания и охлаждения слитка в установке непрерывной разливки металлов, содержащее металлический бандаж, размещенный в нем с зазором ролик и форсунки, расположенные со стороны торцов ролика с направлением их осей в зазор между бочкой ролика и бандажом, при этом продольные оси бандажа и ролик параллельны, отличающееся тем, что, с целью повышения качества отливаемых слитков и увеличения стойкости роликов, оно снабжено по...
Кулачковий механізм привода робочих органів токарного верстата
Номер патенту: 3761
Опубліковано: 27.12.1994
Автори: Торопов Олександр Іванович, Захарченко Валерій Федорович
МПК: F16H 53/00, B23B 21/00
Мітки: привода, робочих, токарного, кулачковий, верстата, механізм, органів
Формула / Реферат:
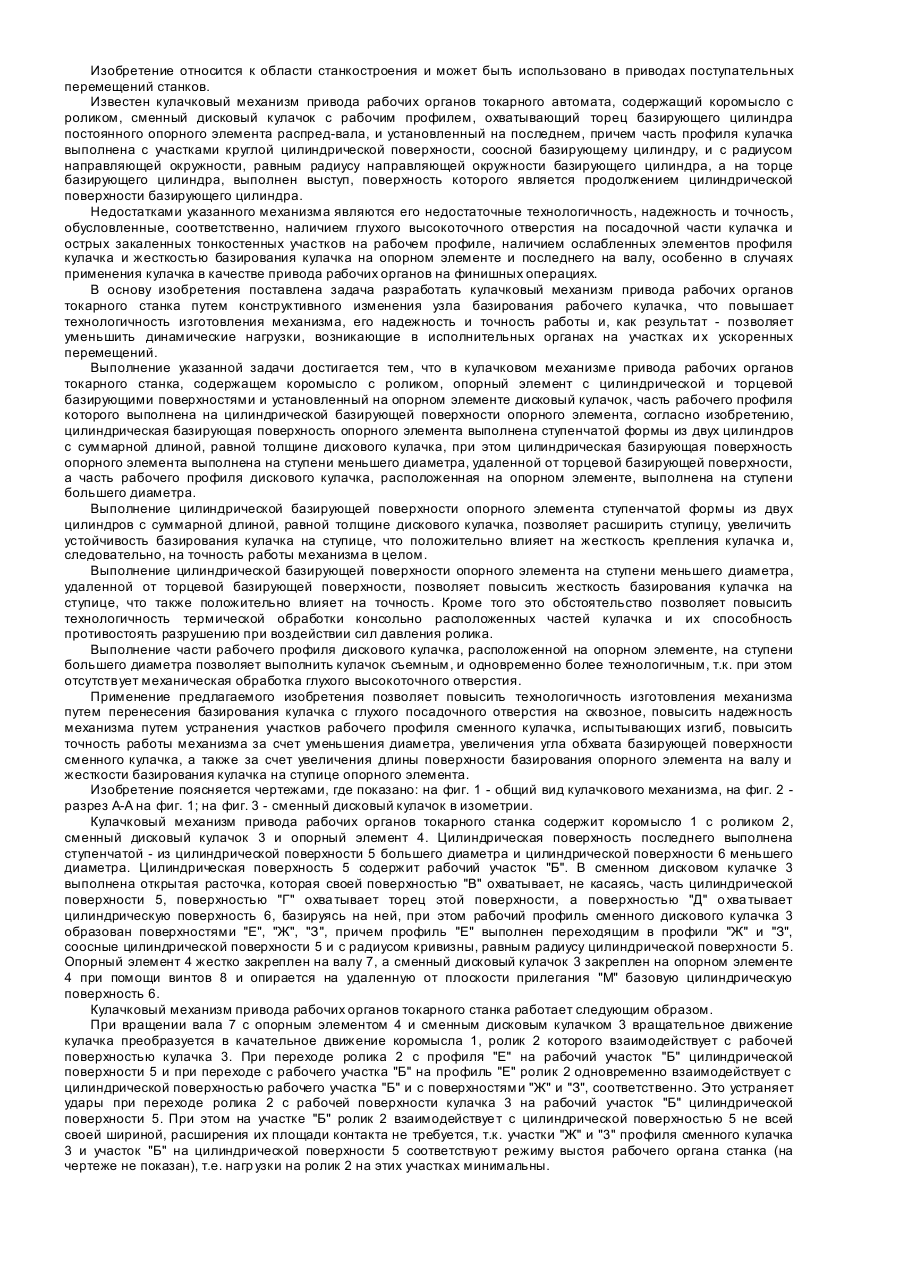
Кулачковый механизм привода рабочих органов токарного станка, содержащий коромысло с роликом, опорный элемент с цилиндрической и торцевой базирующими поверхностями и установленный на опорном элементе дисковый кулачок, часть рабочего профиля которого выполнена на цилиндрической базирующей поверхности опорного элемента, отличающийся тем, что цилиндрическая базирующая поверхность опорного элемента выполнена ступенчатой формы из двух цилиндров с...
Амортизаційно-натяжний механізм гусениці транспортного засобу
Номер патенту: 12190
Опубліковано: 25.12.1996
Автори: Лаврентьєв Сергій Володимирович, Чернявський Ілля Шмулевич, Шашков Микола Фролович, Козоріз Олександр Якович
МПК: B62D 55/08
Мітки: транспортного, гусениці, засобу, механізм, амортизаційно-натяжний
Формула / Реферат:
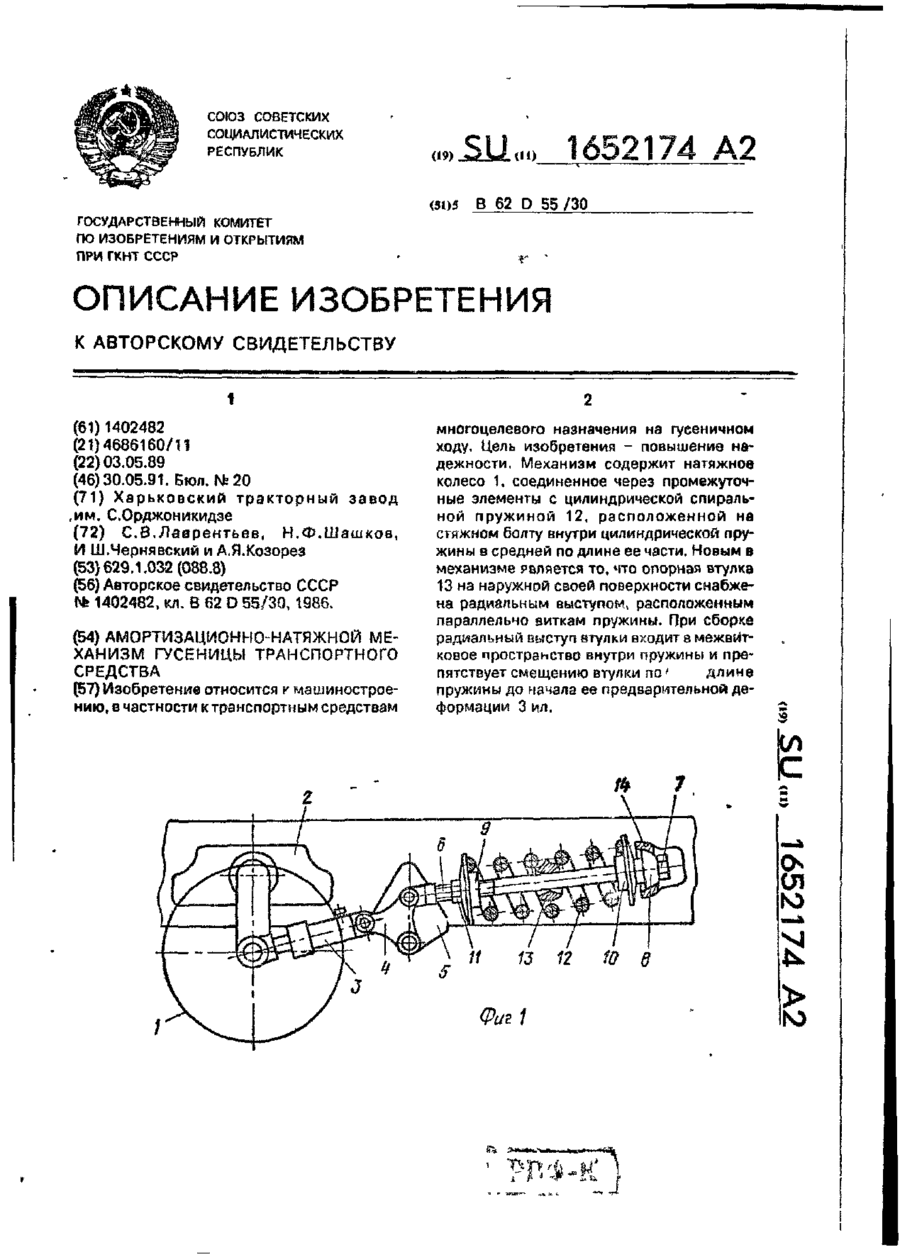
Амортизационно-натяжной механизм гусеницы транспортного средства по авт. св. №1402482, отличающийся тем, что, с целью повышения надежности, опорная втулка на наружной сферической поверхности снабжена радиальным выступом, расположенным параллельно виткам спиральной цилиндрической пружины сжатия.
Механізм регулювання та фіксації сільськогосподарських машин по висоті
Номер патенту: 5852
Опубліковано: 29.12.1994
Автори: Смоткін Едуард Наумович, Манукян Олександр Рубенович, Грибовський Михайло Леонтійович
МПК: A01B 63/00
Мітки: сільськогосподарських, механізм, висоті, регулювання, машин, фіксації
Формула / Реферат:
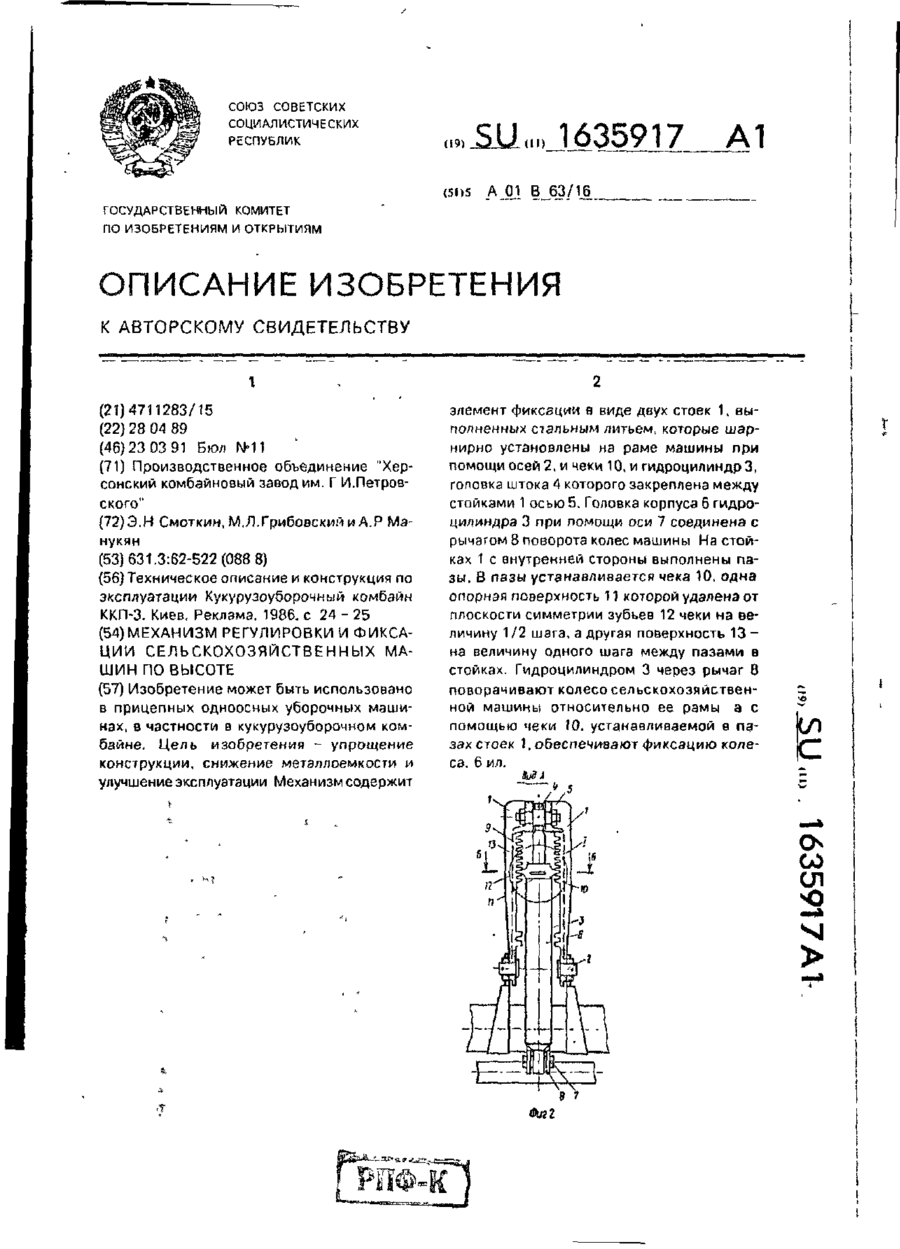
Механизм регулировки и фиксации сельскохозяйственных машин по высоте, содержащий элемент фиксации и гидроцилиндр, смонтированные на раме машины и шарнирно соединенные с рычагом, смонтированным на оси колес, отличающийся тем, что, с целью упрощения конструкций, снижения металлоемкости и улучшения эксплуатации, элемент фиксации выполнен в виде двух шарнирно закрепленных на раме машины стоек, расположенных параллельно, на внутренних...
Храповий механізм
Номер патенту: 12945
Опубліковано: 28.02.1997
Автори: Малюта Олександр Дмитрович, Литвиненко Юрій Вікторович, Литвиненко Віктор Панасович, Блінков Генадій Васильович, Малюта Дмитро Іванович, Пахомов Володимир Іванович
МПК: F16H 29/00
Формула / Реферат:
(57) Храповой механизм, содержащий вал, установленные на нем два храповых колеса с одинаковым эвольвентным зубчатым профилем, жестко соединенные между собой и развернутые одно относительно другого на 180°, толкатель в виде собачки и фиксатор, установленные на ползуне и взаимодействующие с соответствующими храповыми колесами, профиль впадин между зубьями которых соответствует профилю фиксатора, отличающийся тем, что профиль зубьев храпового...
Попередній патент: Електропривод постійного струму
Наступний патент: Дитячий спортивний комплекс
Випадковий патент: Спосіб розподіленої аеродинамічної компенсації дії вітрових збурень на траєкторію польоту повітряного судна