Спосіб визначення висотно-часового розподілу електронної концентрації іоносферної плазми при нестабільності константи радіолокатора
Номер патенту: 24531
Опубліковано: 10.07.2007
Автори: Пуляєв Валерій Олександрович, Лисенко Валерій Миколайович

Формула / Реферат
Спосіб визначення висотно-часового розподілу електронної концентрації іоносферної плазми при нестабільності константи радіолокатора, коли при некогерентному розсіянні використовується вираз:
 ,
,
де h - висота, Ps(h), Te(h) і Ti(h) - висотні залежності одержаних потужностей сигналу розсіяння, електронної та іонної температур заряджених часток плазми, Ср - константа радіолокатора, що розрахована в один із сеансів в еталонну добу згідно з залежністю:

в якій ![]() , Te(hF2)ET і Ti(hF2)ET - значення на висоті hF2ET максимуму шару F2 потужності сигналу розсіяння, електронної та іонної температур, fNF2ET - одержані за допомогою іоносферної станції (іонозонду) значення критичної частоти цього шару,
, Te(hF2)ET і Ti(hF2)ET - значення на висоті hF2ET максимуму шару F2 потужності сигналу розсіяння, електронної та іонної температур, fNF2ET - одержані за допомогою іоносферної станції (іонозонду) значення критичної частоти цього шару,
який відрізняється тим, що значення Ср уточнюється з оглядом на новий технічний стан радіолокатора в поточну добу шляхом заміни його на СрПОТ, яке одержується в результаті обчислювальної процедури, коли потужність фонового шуму PN(t)ET (накопичена за період Т еталонної доби в кінці радіолокаційної розгортки дальності, де сигнал некогерентного розсіяння вже не реєструється) за допомогою ітераційної (при зміні величин kIT і dIT) процедури поелементно порівнюється з віднесеною (t=tвідн) до періоду еталонної доби потужністю PN(t)ПОТ, одержаною в поточну добу, з використанням виразу:

а в момент одержання мінімуму суми відхилень (в момент максимального співпадання змінних складових, пов'язаних з добовою періодичністю появи в зоні радіовидимості локатора зоряних скупчень) фіксуються коефіцієнти k=kIT і d=dIT, де k - величина, еквівалентна зміні підсилення апаратури прийому, а значить - і потужності сигналу розсіяння, a d - еквівалентна зміні постійної складової потужності шуму, та уточнюється константа за виразом
СрПОТ=Ср/к.
Текст
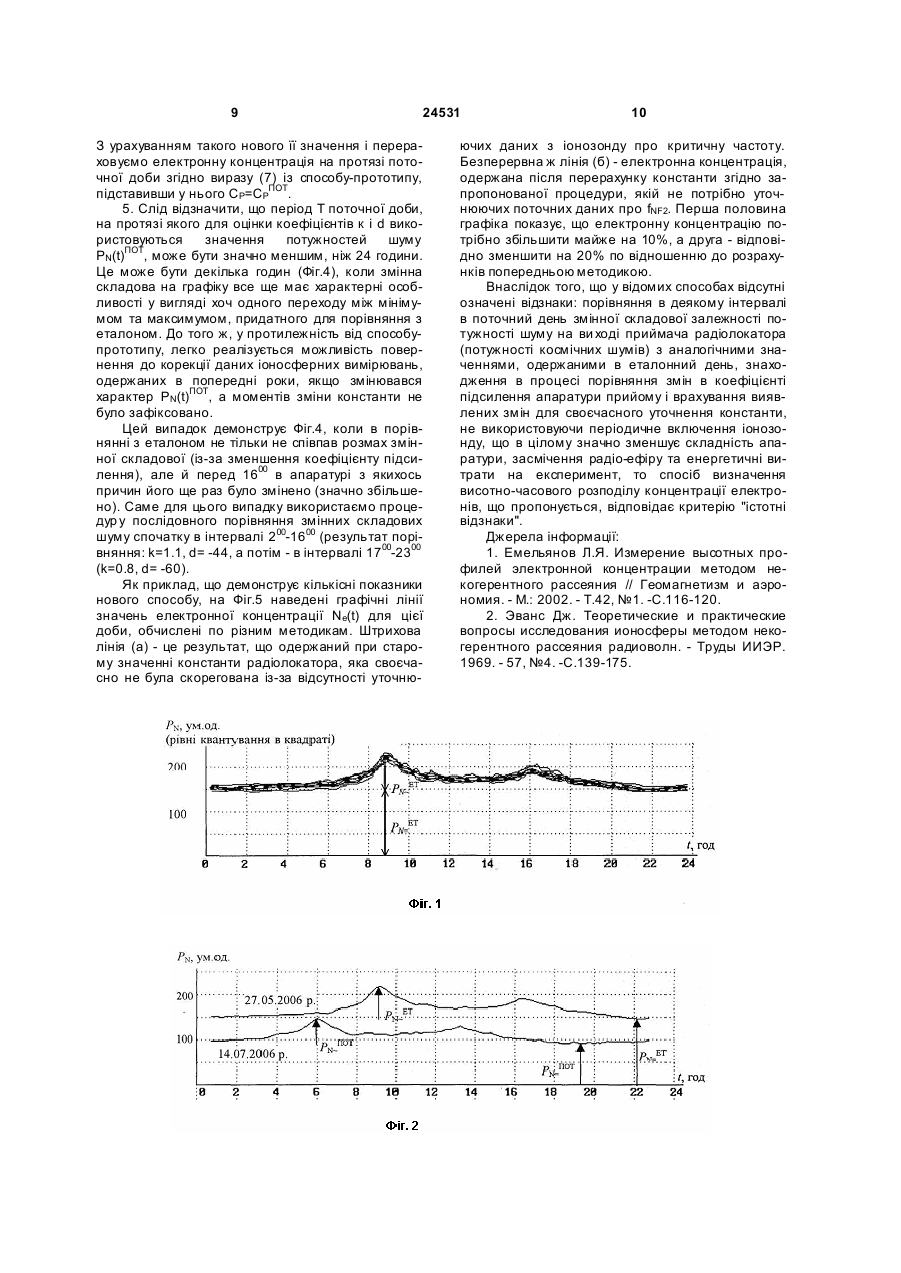
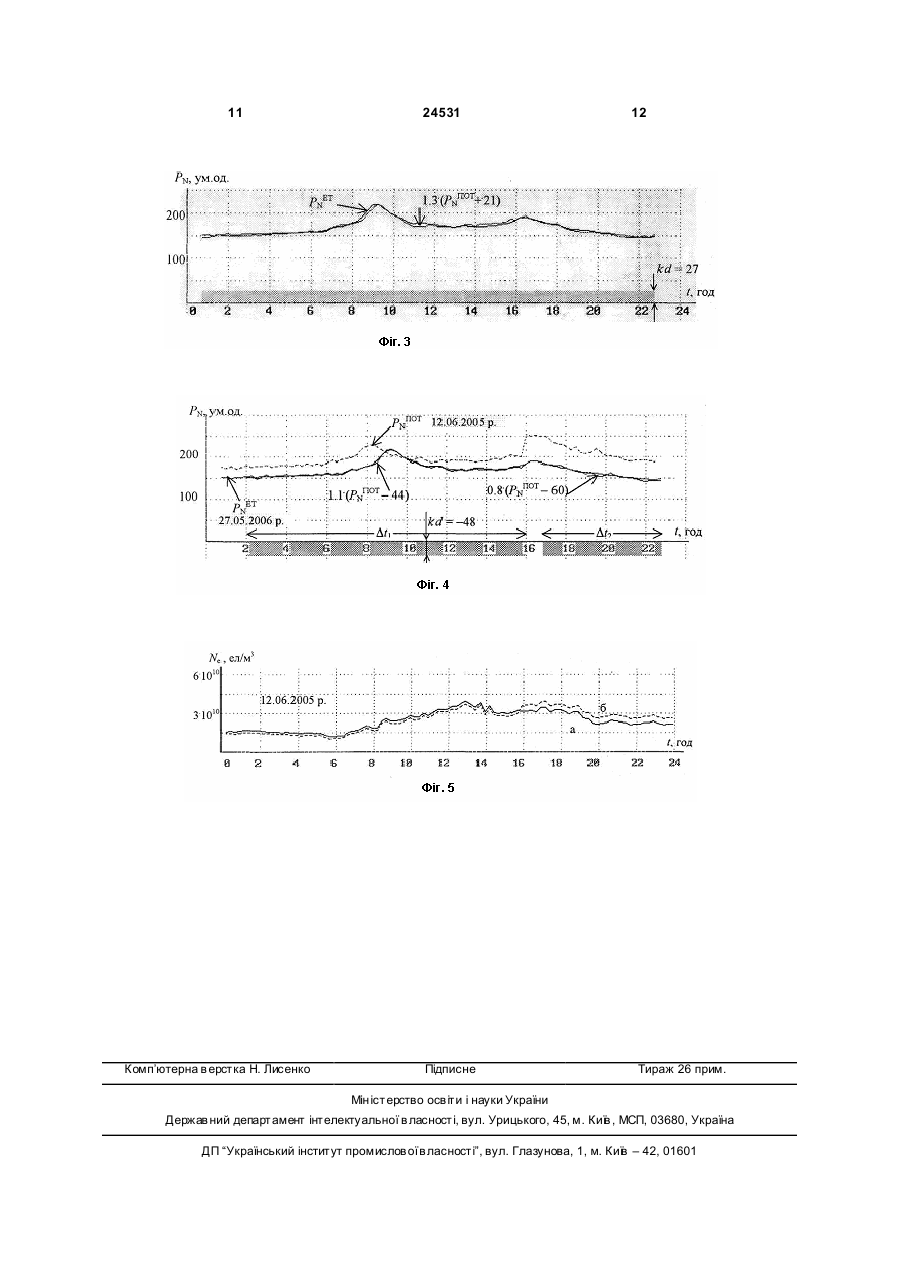
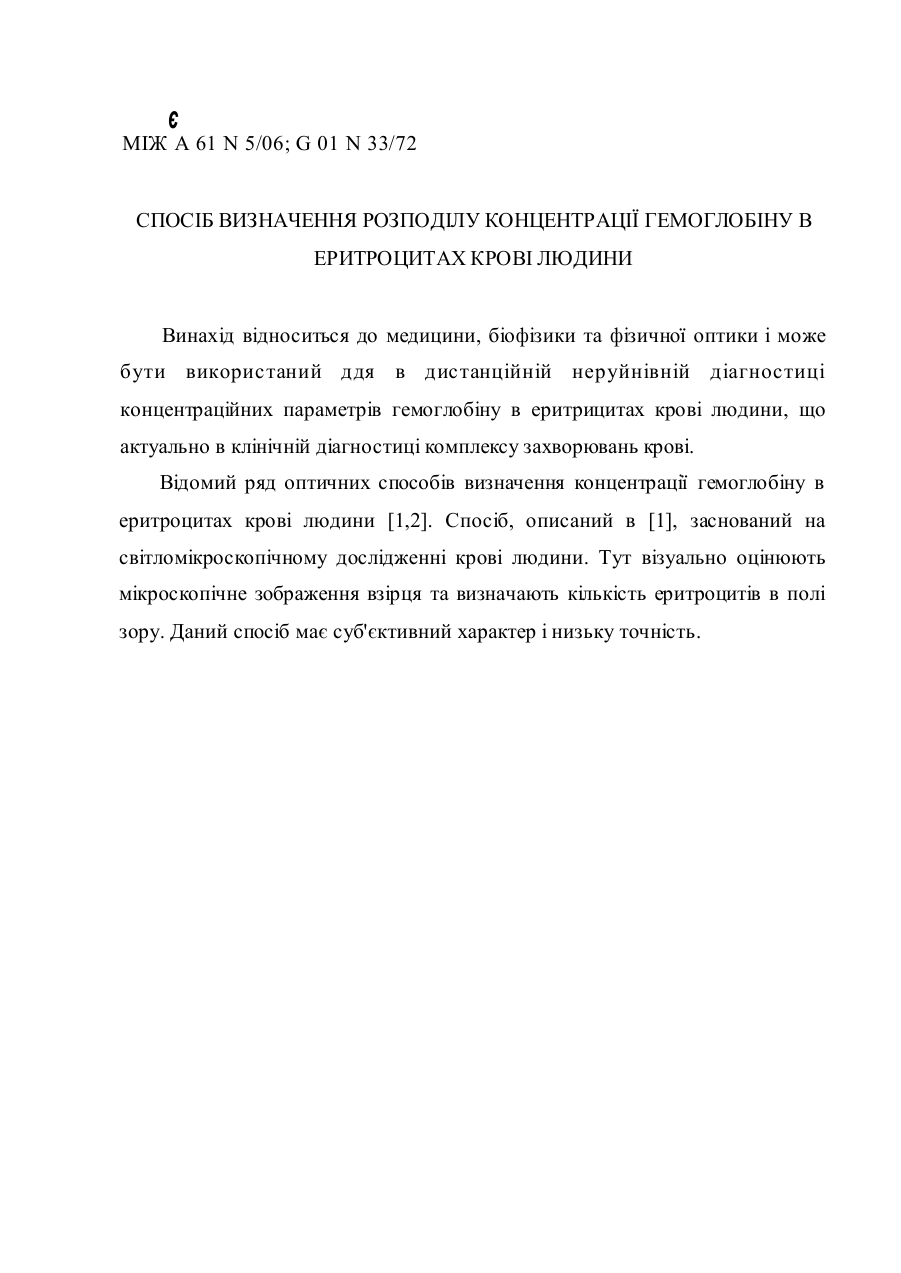
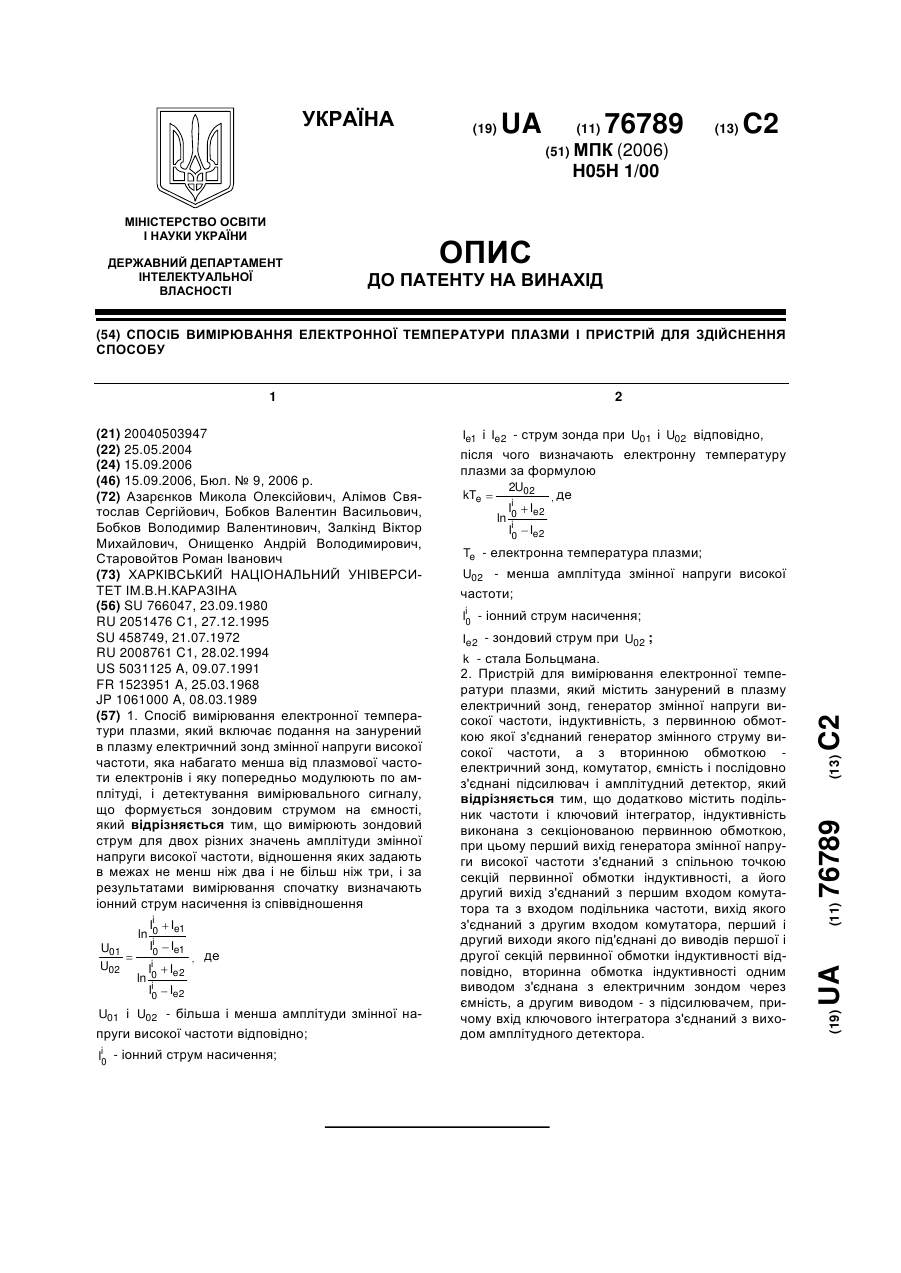
Спосіб визначення висотно-часового розподілу електронної концентрації іоносферної плазми при нестабільності константи радіолокатора, коли при некогерентному розсіянні використовується вираз: 3 24531 А.Ф.Барнеттом, Ж.Брейтом і М.Тьювом, базувалися на спостереженні радіосигналу з частотою/, відбитого від іоносфери. Відбиття відбувається на висо ті, на якій f=fN , де fN - плазмова часто та, обумовлена виразом 1 Ne × e2 (1) (Гц) 2p me × e0 В цьому випадку Ne - електрона концентрація (ел/м 3); e - заряд електрона (1.6×10-19к); m е - маса електрона (9.1×10-31кг) і e о - діелектрична проникність вільного простору (8.85×10-12ф/м). ЯКЩО fN виразити в мегагерцах, (1) прийме вигляд добре відомого співвідношення f =8.97×10-6 Ne ,з ві дки fN = N N e =1 .2 4×10 10 ×fN2 (2) Але особливістю подібних досліджень є те, що, збільшуючи частоту сигналу f за допомогою іоносферної станції (іонозонду) можна досліджувати залежність розподілу концентрації від висоти лише до положення максимуму шару F2 (до значень N eF 2 ). Іонізовані ж області, що лежать вище цього максимуму (вище 200...300км), не вдається досліджувати з Землі методом відбиття. Якщо необхідно у більшому діапазоні (у тому числі і вище 300км) розрахувати висотний профіль електронної концентрації Ne(h), то використовується спеціалізована імпульсна радіолокаційна система, що дозволяє проводити аналіз сигналу, некогерентно розсіяного іоносферою в метровому або дециметровому діапазонах. У цьому випадку залучається методика аналізу залежності потужності цього сигналу від затримки (так званий метод "профілю потужності"). Розглянемо відомий спосіб наземного радіолокаційного визначення електронної концентрації, який базується на використанні принципу "профіля потужності" [1]. Для його реалізації потрібен наступний склад апаратури: радіолокатор HP, що має можливість вимірювати як висотний профіль потужності Ps(h), так і набір кореляційних функцій відбитого (розсіяного) сигналу. Обо в'язково в якості додаткового незалежного засобу треба мати розташований поблизу безперервно працюючий іонозонд, який весь час буде оцінювати значення критичної частоти F NF2 на висоті максимуму шару F2. Наприкінці кожного сеансу вимірювань (звичайно це час інтегрування видеосигналу на протязі одиниць або десятків хвилин) за допомогою такого складу апаратури одержують статистично усереднений висотний профіль потужності Ps(h). Використовуючи ж кореляційний набір функцій, за відомими методиками (так звана зворотна задача електродинаміки) одержують значення і висотного розподілу температур заряджених часток: електронів Те(h) та іонів Тi(h). В результаті ці дані дають можливість розрахува ти нормований висотний профіль по відношенню до електронної концентрації за виразом Ne (h)НОРМ = Ne (h) Ps (h) × h2 × [1+ Te (h ) / Ti(h)] = N e (hF2 ) Ps (hF2 ) × h2 F2 × [1 + Te (hF2 ) / Ti(hF2 )] (3) де hF2 - ви сота , на якій Ne(h)/N e(hF 2)=1 . А вже з його допомогою, в процесі прив'язки цього 4 профілю в максимумі до значень електронної концентрації, обчисленої іонозондом за допомогою залежності (2), - знайти і абсолютні значення висотного розподілу Ne(h) як Ne (h) = Ne (h)НОРМ × NeF2 (4) Недолік способу полягає в тому, що наявність іонозонду в кожнім сеансі вимірювань - обов'язкова вимога, а це призводить до значного апаратного ускладнення експерименту і електромагнітного засмічення ефіру у широкому діапазоні частот (десятки МГц). Найбільш близьким до способу, що пропонується – прототипом - є спосіб, який описано в [2]. Він базується на тому ж використанні радіолокатора HP, тобто на вимірюванні висотного профілю потужності Ps(h) сигналу HP та на обчисленні температур заряджених часток. При цьому теж необхідно мати іонозонд, але який пропонується включати для оцінки значень критичної частоти fNF2 лише періодично (передбачалося не більше 1 разу за добу). Особливістю цього способу є те , що дана конфігурація пропонувала продовжити розрахунки електронної концентрації, використовуючи при зупинках іонозонда відомості про константу радіолокатора CP. Суть методики наступна. Згідно виразу, приведеному в [2], при зондуванні іоносфери розсіяння формується за законом N (h)× s(h) Ps (h) = Cp × e 2 (Вт) (5) h )де константа С р - постійна пропорційності, що залежить від параметрів радіолокатора; s (h) висотна залежність ефективного поперечного перерізу розсіяння на електрон, що має радіус rе. Величину s (h) в метровому діапазоні хвиль можна звести до відношення температур заряджених часток іоносферної плазми, тобто se s (h) = (6) ( 1+ Te (h) / Ti h ) де s е приймається за величину 4 p rе2=1·1028 (м). Звідси формула, що використовується для розрахунку електронної концентрації, має вигляд Ne (h ) = Ps (h )× h 2 × [1 + Te (h ) / Ti (h )] Cp (7) Константа ж радіолокатора визначається в одному (або декількох) сеансах в еталонний (ЕТ) час по формулі Cp = ( ) [ 2 Ps (hF2 )ET × hETF2 × 1 + Te (hF 2 )ET / Ti (hF 2 )ET 1. 24 ×10 10 ( ×f ET NF2 ) 2 ] (8) Для цього, як було вказано вище, потрібні результати оцінки параметрів іоносфери, які за допомогою радіолокатора HP отримуються на висоті максимуму шару F2, а також обчислене іонозондом значення fNF2. Для надійності ж статистичного уточнення бажано при цьому мати ще й спокійний стан іоносфери Недоліком цього методу є те, що в реальності величина Ср час від часу змінюється, що призводить до непередбачених похибок, а способів перевірки константи, окрім повторного включення 5 24531 іонозонду, до останнього часу не існувало. Однією із причин нестабільності величини С р є зміна режиму роботи приймальної системи радіолокатора із-за нестабільності параметрів радіокомпонентів. Також в залежності від варіювання відношення сигнал/шум (із-за сонячної активності, магнітних бур і т. д.) можуть змінюватися (персоналом або автоматично) коефіцієнти підсилення відеопристроїв для узгодження параметрів аналогового сигналу з динамічним діапазоном АЦП. Це, як приклад, вимагає такого відстеження розмаху сигналу, щоб з максимуму іонізації він не перебільшував ±1В, і в той же час з верхніх висота х, де треба надійно оцінювати рівень шуму PN (T) - не був меншим, ніж 10 рівнів квантування по амплітуді. Якщо в результаті цього зміна коефіцієнту підсилення все ж відбулася, а уточнення константи ні, то всю гр упу сеансів на протязі поточної доби треба відбраковувати, бо недостовірні в них дані визвуть непередбачені результати при подальшій інтерпретації. Це означає загублений, бо неможливо знову повторити той самий стан іоносфери, експеримент. Тобто, з метою підтримки найбільшої вірогідності одержання експериментальних даних, по відношенню до кожного сеансу бажано мати, по максимуму, майже безупинно працюючий іонозонд, але вже для контролю ним моменту можливої зміни константи. В основу корисної моделі, що пропонується, поставлена задача зменшення похибок обчислення електронної концентрації, що виникають із-за нестабільності значень константи радіолокатора на протязі поточної доби, і, конкретно, які мають місце при зміні режиму роботи приймальної системи радіолокатора. Вирішення цієї задачі досягається тим, що пропонується математична процедура корекції константи С p радіолокатора, використовуючи результати іоносферних спостережень як за всю за добу, так і за менший період. Ця корекція проводиться шляхом перерахунку константи згідно виразу (8), але використовуючи не іонозонд, а відомості про зміну деяких те хнічних характеристик радіолокатора. Операція корекції базується на тому припущенні, що якби теперішній стан радіолокатора, з новим коефіцієнтом підсилення приймальної частини, було використано під час еталонної доби, то в момент оцінки константи він забезпечив би іншу потужність прийнятого з максимуму шару F2 сигналу розсіяння Ps(hF2).І зміна цієї потужності еквівалентна (і це використано в моделі) зміні потужності складових фонового шуму PN(t), ТИХ складових, що мають постійний, не залежний від часу характер, а на вихід приймача проходять тим же трактом підсилення. До них видносяться еталонні сигнали, пов’язані з появою в зоні радіовидимости радіолокатора зоряних скупчень, які з добовою періодичністю формують сигнали у вигляді так званих космічних шумів. Таким чином, якщо зміну константи пов'язати зі зміною потужності цих еталонних складових і за допомогою математичних розрахунків, без включення іонозонду, проводити її корегування, то значно зменшується (не більше 1 разу за рік) частота його включення. 6 Розглянемо, яку інформацію несе в собі фоновий шум PN(t), ЯКЩО проаналізувати його значення та складові на протязі доби, представивши їх для наочності у графічному вигляді. Особливість методу HP в тому, що діючі імпульсні установки, хоч вони і мають мегаватові передавачі, одержують енергію розсіяння дуже малу, тому використовують приймачі з чутливістю до вхідного сигналу PS+N на рівні одиниць і навіть частин мкВ. В результаті в системі обробки, окрім складових Ps, що відносяться до сигналу розсіяння, реєструються безліч складових квазістаціонарних шумів PN різної природи. Алгоритми обробки, накопичуючи абсолютні значення потужності шумів на кінццевому інтервали Dh радіолокаційної розгортки дальності (де сигнал Hpвже на реєструється), використовують ці дані для наступного уточнення значень сигналу розсіяння. Для цього приймається [1], що рівень шуму протягом сеансу (декілька хвилин) постійний, має одне і те ж значення і вздовж всієї радіолокаційної розгортки дальності. А значить, враховуючи його адитивний характер, це можна відняти від суміші PS+N в операціях розрахунку висотного розподілу Ps(h). Як відомо з ряду публікацій, де описана специфіка роботи радіолокаторів HP (автори Таран В.І., Рогожкін Є.В. та інші), фоновий шум обумовлено впливом зовнішніх і внутрішні х факторів. До зовнішніх факторів відноси ться наявність світіння (шум) неба, що визвано періодичною, від доби до доби, появою в зоні діаграми спрямованості антени сигналів від радіоджерел, якими є зоряні скупчення. Коли цей шумовий потік падає з простор у на приймальну антен у, у залежності від напрямку (або часу доби при одному напрямку) характер скупчень дає внесок від одиниць до декількох сотень градусів е фективної шумової температури TN=РN/k D F, де k=1.38*10-23Дж/К - стала Больцмана, D F- смуга пропускання приймача радіолокатора на відеочастоті, РN - потужність шумів. Також сюди відносяться й інші сигнали, що попадають в антенну (грозові розряди, відбиття від землі, теплові шуми земної поверхні, прийняті паразитними пелюстками діаграми спрямованості антени та ін.). А вн утрі шні фактори обумовлені шумами, пов'язаними з технічним станом радіолокатора (шум радіокомпонентів і т д.), які при їх приведенні до входу в цілому теж дають внесок на рівні декількох сотень градусів. Приклад добових залежностей адитивної суми потужностей таких зовні шні х та вн утрішніх шумів, які зафіксовані в кінці радіолокаційної розгортки по результатам кожного 15-и хвилинного сеансу вимірювань, приведено на Фіг.1. Цей результат одержано радіолокатором HP, який розташований на території Інституту іоносфери НАН і МОН України (м. Харків). Дані належать до періоду безперервної роботи з 27 травня по 6 червня 2006p., при цьому лінії гра фіка по відношенню до одного і того ж моменту кожної доби мають систематичний відхід влі во на 1/365 частку доби (4хв.). Для їх статистичного усереднення (точки) 7 24531 положення ліній було скореговано (віднесено) до стану на 27.05.2006р. (в подальшому тексті вони прийняті за еталон шуму). Для подальших досліджень на Фіг.1 виділимо дві складові: 1. Перша із них, змінна складова PN~(t)ЕТ , утворюється за рахунок наявності ли ше космічних шумів (сигналів від зоряних скупчень). Це вона формує ефект постійного відходу максимумів на лінії графіка вліво. В цілому, положення цих максимумів залежать тільки від номерів доби та місяця і повторюються через рік. Цю складову в еталонний день ми і приймемо за зразок для подальшого порівняння її з такою ж формою, одержаною радіолокатором в поточний час. 2. До другої, постійної складової РN=(t)ЕТ, віднесемо всі ті сигнали, що утворюються із-за наявності інших зовнішніх і внутрішніх факторів. На радіолокаторах, що інші географі чні координати, або використовують нахил антени, теж реєструються подібні шуми. На формі змінної складової також є два максимуми та два мінімуми, що пов'язано з особливістю траєкторії променя антени по карті неба, яку формує еліпсоїдна галактика, і зміною при цьому складу спостерігаємих зоряних скупчень. Як показує практика іоносферних вимірювань, на поведінці розмаху цієї графічної форми РN~(t)ЕТ прямо позначається зміна технічного стану та режимів роботи приймальної системи радіолокатора (насамперед, її коефіцієнту передачі). Це значить, що, аналізуючи розмах поточної кривої по відношенню до еталонної, можна знайти, на яку величину змінився також і коефіцієнт передачі, та використати цей результат для корекції константи. Сутність способу, що пропонується, є такою. Для розрахунку значень електронної концентрації Ne(h), як і в способі-прототиш, будемо використовувати вираз (7) При цьому в якості константи радіолокатора С Р залучається й значення, одержане в еталонний час за виразом (8), але новим є те, що значення константи СР перед розрахунками уточнюється Це значення згідно процедури, що наведена нижче, замінюється на С РПОТ, яке більш коректно відповідає новому технічному стану радіолокатора в поточний день Запропонована процедура наступна Вона передбачає порівняння потужності шум у РN(t)ПОТ, одержаної на протязі виділеного періоду Т в цей поточний день, з потужністю PN(t)ET, одержаною за такий же період в еталонний день. Але перед цим місця розташування елементів поточної потужності корегуються (відносяться) до періоду еталонної доби шляхом їх циклічного переносу по осі часу вправо на t=tВІДН, еквівалентне різниці між датами, які розглядаються. Післявіднесення визначається ступінь максимального співпадання форм змінних складових двох потужностей, для чого використовується ітераційна (з вводом змінних величин kІТ та dІТ) процедура поелементного порівняння їх значень у вигляді пошуку суми середньоквадратичних відхилень елементів за допомогою наступного виразу 8 T åì í î t =0 ( ) PN(t )ET - kIT × éPN t = tВІДН ПОТ + dIT ù ü 2Þ min, ê úý ë ûþ (9) При цьому в момент одержання мінімуму суми відхилень фіксуються коефіцієнти k=kІТ і d=dІT, де к - пропорційне значенню, у скільки разів по відношенню до еталону змінився розмах змінної складової РN~(t)пот , а значить - і коефіцієнт підсилення апаратури прийому, d - значенню, на скільки змінилась постійна складова потужності шуму РN=(t)пот . По результатам проведення такої ітерації виявляється, що так як коефіцієнт підсилення в радіолокаторі змінився в к раз, то і потужність сигналу розсіяння з максимуму шар у F2, яку було б зафіксовано на виході приймача в еталонний день в момент розрахунку константи, з огляду на новий його технічний стан, відповідала б іншому, приведеному значенню, а саме Ps (hF2 )ЕТ едене = Ps (hF 2 ) прив ET (10) k З цього виходить, що це значення приведеної потужності перетворює формулу (8) по розрахунку константи у способі-прототипі у вигляд 2 CПОТ p = ЕТ ET ET ET Ps (hF2 )приведене × æ h F2 ö × é1 + Te (hF2 ) / Ti (h F2 ) ù ç ÷ ú è ø ê ë û 2 10 æ ET × ç f NF2 ö ÷ 1 .24 × 10 è C = p k (11) ø з якої випливає, що значення С ПОТ р можна P одержати з СP еталонного дня за формулою C ПОТ = P CP k (12) І все це - при значному апаратурному спрощенні експерименту та при економії енерговитрат на роботу потужних (кіловати) пристроїв радіозонду Робота за способом, що пропонується, нижче демонструється на реальному прикладі Вона полягає в наступному. 1 Накладаємо на добовий фон еталонних шумів PN(t)ET, одержаних 27 05 2006р , потужність шуму РN(t)ПOТ,одержану на протязі доби в поточний день 14 07 2006р (Фіг.2) 2 Відносимо до періоду еталонної доби положення елементів поточної потужності шуму РN(t)ПOТ шляхом їх циклічного переносу вправо на період, що еквівалентний різниці в 48 діб між датами, тобто на величину в 48/365 доби, або tВІДН.=3год.12 хв. 3 Проводимо ітеращйну процедуру поелементного порівняння цих приведених потужностей, одержаних впродовж всієї доби, використовуючи вираз (9) Фіксуємо в момент одержання мінімуму суми відхилень коефіцієнти k=13 і d=21 Момент такого найкращого співпадання змінних складових РN~(t)ПOТ поточного дня з еталоном PN~(t)ET приведено на Фіг.3 При цьому розмахи постійних складових можуть як співпадати (kd=0), так і ні (у нашому випадку kd=27) із-за зміни умов засмічення радіо ефіру. 4 По результатам ітерації виявляємо, що так як коефіцієнт підсилення приймальної системи змінився в k=1.3 раз, то і значення константи відповідає меншому значенню, а саме С РПОТ= СР/1.3. 9 24531 З урахуванням такого нового її значення і перераховуємо електронну концентрація на протязі поточної доби згідно виразу (7) із способу-прототипу, підставивши у нього С P=СРПОТ. 5. Слід відзначити, що період T поточної доби, на протязі якого для оцінки коефіцієнтів к і d використовуються значення потужностей шуму РN(t)ПOТ, може бути значно меншим, ніж 24 години. Це може бути декілька годин (Фіг.4), коли змінна складова на графіку все ще має характерні особливості у вигляді хоч одного переходу між мінімумом та максимумом, придатного для порівняння з еталоном. До того ж, у протилежність від способупрототипу, легко реалізується можливість повернення до корекції даних іоносферних вимірювань, одержаних в попередні роки, якщо змінювався характер РN(t)ПOТ, а моментів зміни константи не було зафіксовано. Цей випадок демонструє Фіг.4, коли в порівнянні з еталоном не тільки не співпав розмах змінної складової (із-за зменшення коефіцієнту підсилення), але й перед 1600 в апаратурі з якихось причин його ще раз було змінено (значно збільшено). Саме для цього випадку використаємо процедур у послідовного порівняння змінних складових шуму спочатку в інтервалі 200-1600 (результат порівняння: k=1.1, d= -44, а потім - в інтервалі 1700-2300 (k=0.8, d= -60). Як приклад, що демонструє кількісні показники нового способу, на Фіг.5 наведені графічні лінії значень електронної концентрації Ne(t) для цієї доби, обчислені по різним методикам. Штрихова лінія (а) - це результат, що одержаний при старому значенні константи радіолокатора, яка своєчасно не була скорегована із-за відсутності уточню 10 ючих даних з іонозонду про критичну частоту. Безперервна ж лінія (б) - електронна концентрація, одержана після перерахунку константи згідно запропонованої процедури, якій не потрібно уточнюючих поточних даних про fNF2. Перша половина графіка показує, що електронну концентрацію потрібно збільшити майже на 10%, а друга - відповідно зменшити на 20% по відношенню до розрахунків попередньою методикою. Внаслідок того, що у відомих способах відсутні означені відзнаки: порівняння в деякому інтервалі в поточний день змінної складової залежності потужності шуму на ви ході приймача радіолокатора (потужності космічних шумів) з аналогічними значеннями, одержаними в еталонний день, знаходження в процесі порівняння змін в коефіцієнті підсилення апаратури прийому і врахування виявлених змін для своєчасного уточнення константи, не використовуючи періодичне включення іонозонду, що в цілому значно зменшує складність апаратури, засмічення радіо-ефіру та енергетичні витрати на експеримент, то спосіб визначення висотно-часового розподілу концентрації електронів, що пропонується, відповідає критерію "істотні відзнаки". Джерела інформації: 1. Емельянов Л.Я. Измерение высотных профилей электронной концентрации методом некогерентного рассеяния // Геомагнетизм и аэрономия. - М.: 2002. - Т.42, №1. -С.116-120. 2. Эванс Дж. Теоретические и практические вопросы исследования ионосферы методом некогерентного рассеяния радиоволн. - Труды ИИЭР. 1969. - 57, №4. -С.139-175. 11 Комп’ютерна в ерстка Н. Лисенко 24531 Підписне 12 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the distribution of electron concentration in ionospheric plasma with height and time under conditions with the instable gain of the radar
Автори англійськоюPuliaiev Valerii Oleksandrovych, Lysenko Valerii Mykolaiovych
Назва патенту російськоюСпособ определения распределения концентрации электронов в ионосферной плазме по высоте и по времени при нестабильности коэффициента передачи радиолокатора
Автори російськоюПуляев Валерий Александрович, Лысенко Валерий Николаевич
МПК / Мітки
МПК: G01S 13/95
Мітки: спосіб, нестабільності, константи, плазми, визначення, радіолокатора, концентрації, іоносферної, розподілу, висотно-часового, електронної
Код посилання
<a href="https://ua.patents.su/6-24531-sposib-viznachennya-visotno-chasovogo-rozpodilu-elektronno-koncentraci-ionosferno-plazmi-pri-nestabilnosti-konstanti-radiolokatora.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення висотно-часового розподілу електронної концентрації іоносферної плазми при нестабільності константи радіолокатора</a>
Спосіб визначення розподілу концентрації гемоглобіну в еритроцитах крові людини
Номер патенту: 31938
Опубліковано: 15.12.2000
Автори: Пішак Ольга Василівна, Бурковець Дмитро Миколайович, Єрмоленко Сергій Борисович, Ушенко Олександр Григорович, Григоришин Петро Михайлович, Ушенко Юрій Олександрович, Пішак Василь Павлович, Кокощук Георгій Ілліч
МПК: A61B 5/05, G01N 33/49
Мітки: людини, спосіб, концентрації, визначення, крові, еритроцитах, гемоглобіну, розподілу
Текст:
...та її статистичного розподілу. Ні в одному із розглянутих нами аналогів запропонованного способу не зустрічається виділення когерентних зображеннь окремих еритроцитів, обертання фазокомпенсуючої пластинки та лінійного аналізатора, вимірювання азимута а* і еліптичністі р* лазерних коливань в когерентному зображені еритроциту, за якими судять про локальну концентрацію гемоглобіну С\ сканування когерентного зображення анасамбля еритроцитів взірця...
Спосіб вимірювання електронної температури плазми і пристрій для здійснення способу
Номер патенту: 76789
Опубліковано: 15.09.2006
Автори: Азарєнков Микола Олексійович, Бобков Валентин Васильович, Онищенко Андрій Володимирович, Бобков Володимир Валентинович, Алімов Святослав Сергійович, Старовойтов Роман Іванович, Залкінд Віктор Михайлович
МПК: H05H 1/00
Мітки: пристрій, електронної, здійснення, спосіб, вимірювання, плазми, температури, способу
Формула / Реферат:
1. Спосіб вимірювання електронної температури плазми, який включає подання на занурений в плазму електричний зонд змінної напруги високої частоти, яка набагато менша від плазмової частоти електронів і яку попередньо модулюють по амплітуді, і детектування вимірювального сигналу, що формується зондовим струмом на ємності, який відрізняється тим, що вимірюють зондовий струм для двох різних значень амплітуди змінної напруги високої частоти,...
Спосіб визначення концентрації речовин
Номер патенту: 78633
Опубліковано: 10.04.2007
Автори: Сітар Валерія Борисівна, Кондратов Владислав Тимофійович
МПК: G01N 21/85, G01J 3/00
Мітки: концентрації, речовин, спосіб, визначення
Формула / Реферат:
Спосіб визначення концентрації речовин, що полягає у формуванні потоку монохроматичного випромінювання заданої потужності та довжини хвилі, пропусканні його через розчини з нормованими за значенням концентраціями С1 і С2, якими почергово заповнюється камера порівняння складаної кювети, заповненні робочої камери складаної кювети концентрацією Сх досліджуваної речовини, почерговому перетворенні потужності вихідних потоків монохроматичного...
Спосіб визначення параметрів розподілу лікарських засобів у крові, органах і тканинах організму

Номер патенту: 19966
Опубліковано: 15.01.2007
Автори: Кресюн Валентин Йосипович, Жук Ольга Вікторівна, Зіньковський Володимир Георгійович, Щукін Сергій Ігоревич, Годован Владлена Володимирівна
МПК: A61B 10/00
Мітки: засобів, тканинах, визначення, розподілу, спосіб, організму, крові, параметрів, органах, лікарських
Формула / Реферат:
Спосіб визначення параметрів розподілу лікарських засобів у крові, органах і тканинах організму, що включає знаходження величин площ під концентраційними фармакокінетичними кривими в крові та органах (тканинах) і їх відношень, який відрізняється тим, що визначають інтеграл концентрації (площа під концентраційною кривою) в інтервалі від 0 до величини концентрації...
Спосіб інверсійного вольтамперометричного визначення концентрації іонів у розчині
Номер патенту: 73297
Опубліковано: 15.07.2005
Автори: Нікітін Олександр Олексійович, Нікітін Олексій Валентинович
МПК: G01N 27/48
Мітки: інверсійного, визначення, вольтамперометричного, іонів, розчині, спосіб, концентрації
Формула / Реферат:
Спосіб інверсійного вольтамперометричного визначення концентрації іонів у розчині, який полягає в тому, що проводять електроліз розчину, що супроводжується нагромадженням твердої фази на електроді, та наступне електророзчинення осаду з вимірюванням аналітичного сигналу, який відрізняється тим, що при електролізі використовують два робочих електроди, виконані з матеріалів, що мають різну перенапругу виділення газу, а електророзчинення твердої...
Попередній патент: Спосіб лікування цукрового діабету вагітних та інсулінозалежних станів у жінок
Наступний патент: Спосіб лікування дермальних опіків у дітей з використанням ксенотрансплантатів у сполученні із кондиційованим середовищем
Випадковий патент: Спосіб лікування пародонтиту