Спосіб юстирування системи візуалізації авіаційного тренажера
Номер патенту: 25508
Опубліковано: 10.08.2007
Автори: Москаленко Михайло Андрійович, Потапова Галина Костянтинівна
Формула / Реферат
1. Спосіб юстирування системи візуалізації авіаційного тренажера, який полягає у тому, що заздалегідь розрахунковим шляхом визначають правило спотворення координат точок зображень, що подаються на вхід системи візуалізації для отримання на проекційному екрані не спотворених при спостереженні із заданої точки спостереження зображень при номінальних параметрах системи візуалізації, після юстирування оптичної проекційної системи на її вхід подають спотворене за цим правилом зображення тест-об'єкта, спостерігають зображення тест-об'єкта на проекційному екрані з точки спостереження, який відрізняється тим, що додатково виміряють кутові координати спостережуваних із заданої точки спостереження зображень опорних точок тест-об'єкта на проекційному екрані, по цих координатах знаходять правило перетворення кутових координат зображення на проекційному екрані в координати опорних точок тест-об'єкта при реальній конфігурації системи візуалізації, за цим правилом спотворюють формовані моделюючою системою координати опорних точок зображення зовнішніх візуальних умов.
2. Спосіб юстирування системи візуалізації авіаційного тренажера за п. 1, який відрізняється тим, що правило перетворення координат спостережуваних з заданої точки спостереження зображень на проекційному екрані опорних точок тест-об'єкта у спотворені координати опорних точок тест-об'єкта знаходять шляхом проектування на проекційний екран зображення тест-об'єкта з точки спостереження, вимірювання кутових координат спостережуваного з точки проектування зображень цих точок та апроксимації отриманої залежності виміряних кутових координат від кутових координат точок тест-об'єкта.
Текст
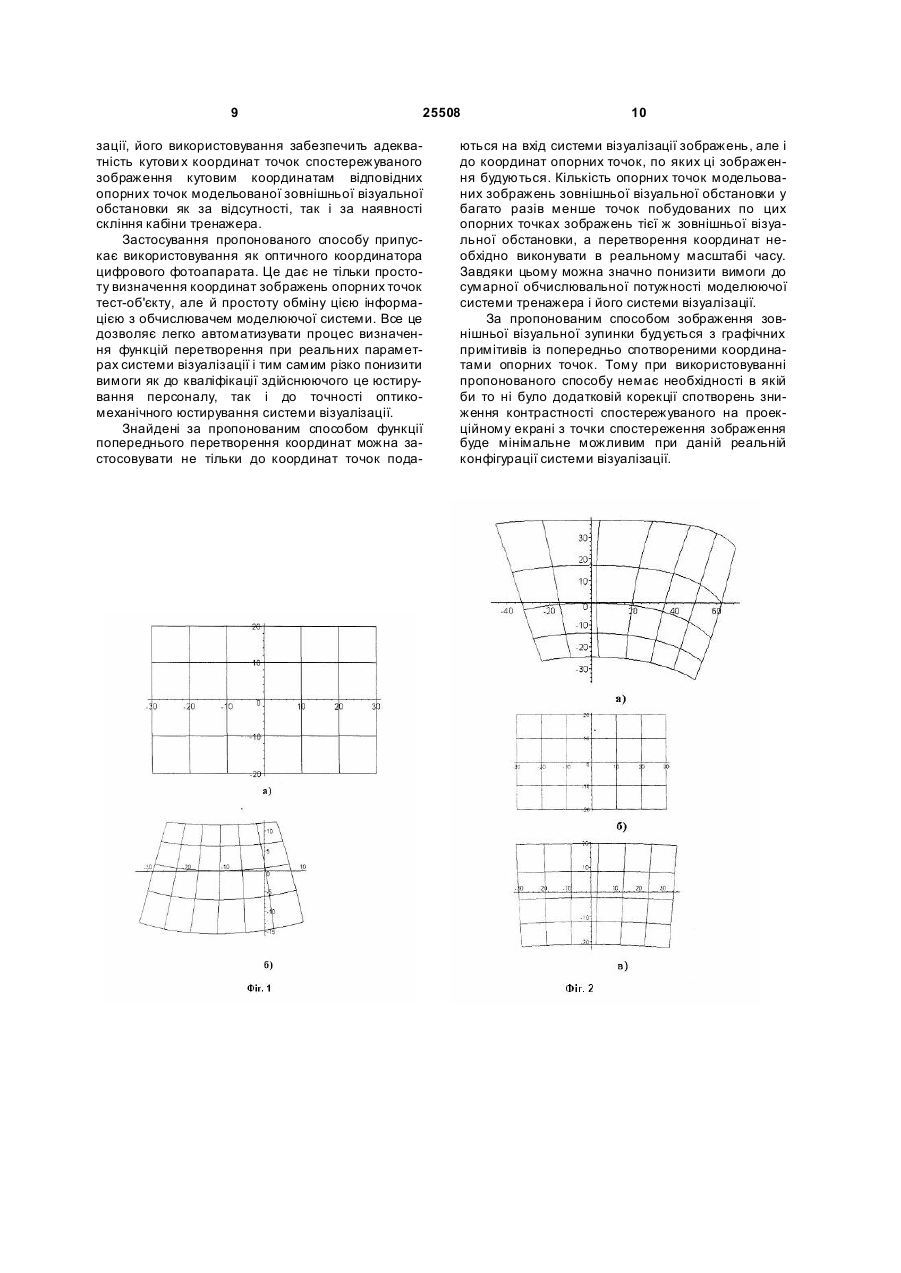
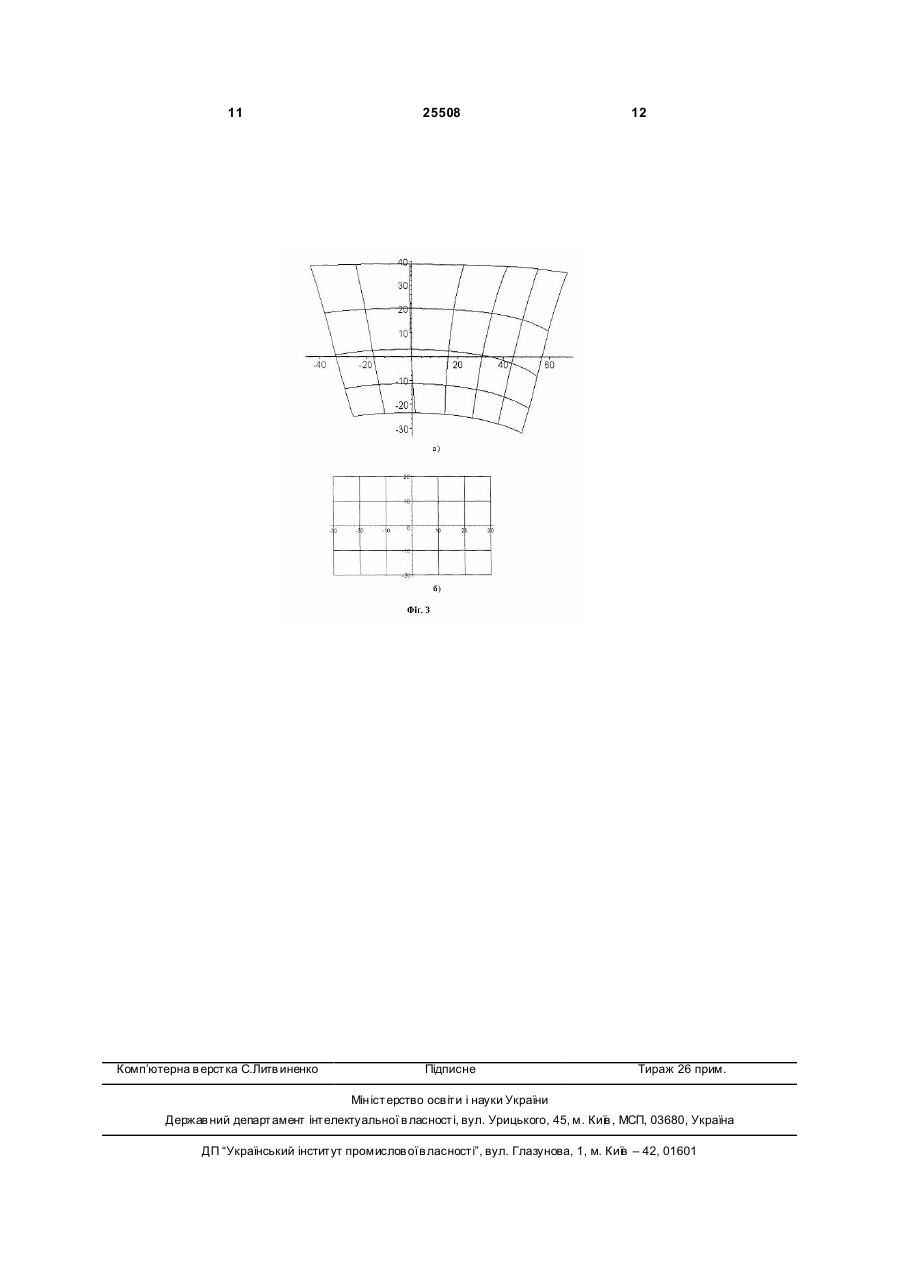
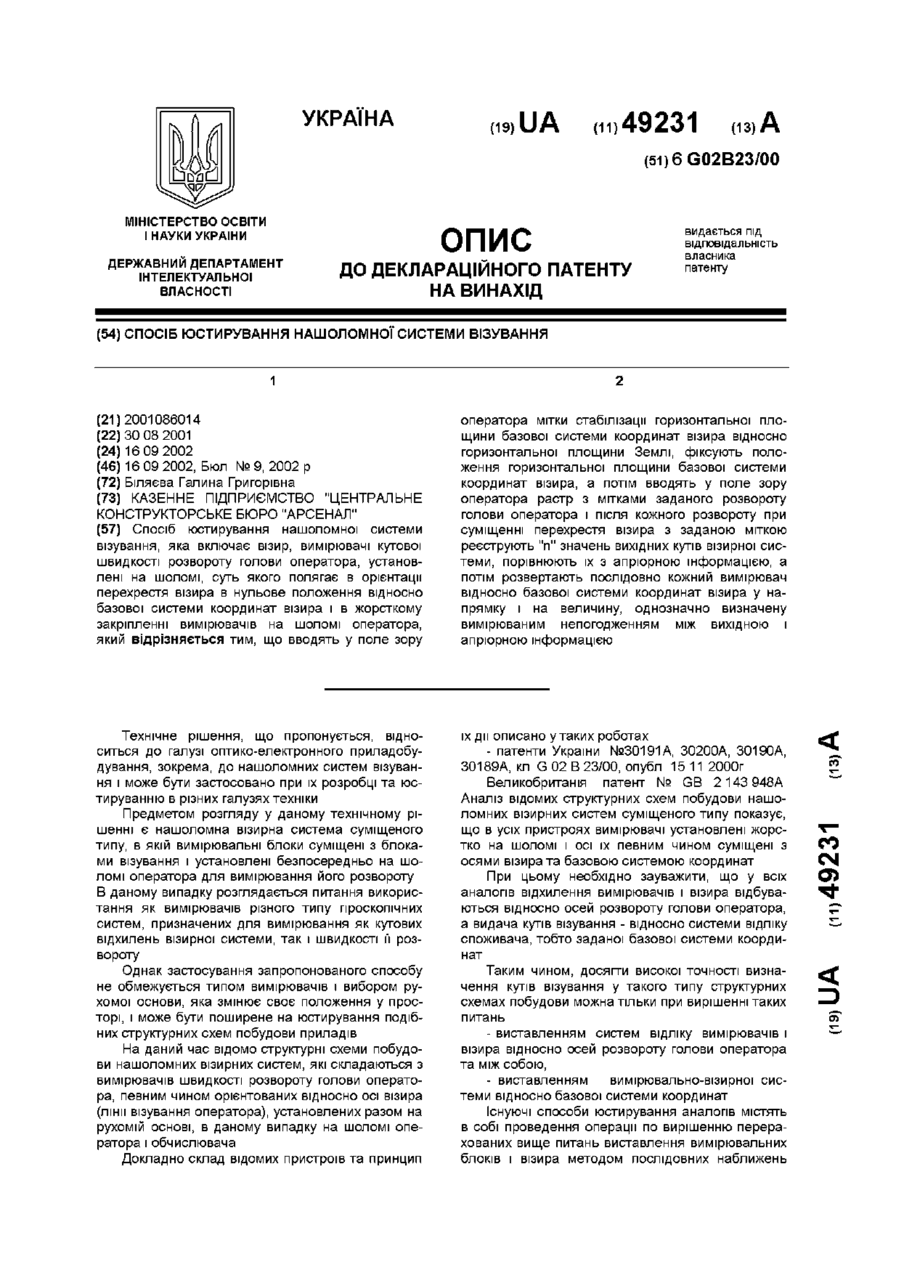
1. Спосіб юстирування системи візуалізації авіаційного тренажера, який полягає у тому, що заздалегідь розрахунковим шляхом визначають правило спотворення координат точок зображень, що подаються на вхід системи візуалізації для отримання на проекційному екрані не спотворених при спостереженні із заданої точки спостереження зображень при номінальних параметрах системи візуалізації, після юстирування оптичної проекційної системи на її вхід подають спотворене за цим правилом зображення тест-об'єкта, спостерігають зображення тест-об'єкта на проекційному екрані з точки спостереження, який відрізняється тим, що додатково виміряють кутові координати спостере U 1 3 25508 режуваних із заданої точки зображень цих точок не співпадуть з початковими кутовими координатами опорних точок тест-об'єкту, по спотворених координатах опорних точок тест-об'єкту знаходять правило перетворення початкових координат опорних точок тест-об'єкту в їх спотворені координати при реальній конфігурації системи візуалізації, а координати точок зображень, які подаються в систему візуалізації, попередньо спотворюють за цим правилом [див. В.А. Бормотін, М.А. Москаленко, Г.К. Потапова. /Анализ геометрии пространства видимых изображений в оптико-коллимационном устройстве системы визуализации авиационного тренажера /В кн. Матеріали міжнародної науковотехнічної конференції «АВІА-2004», т.ІІ, Київ, 2004p.]. Недоліками цього способу є недостатня адекватність спостережуваного оператором зображення перспективи модельованої зовнішньої візуальної обстановки, великі витрати часу на пошук таким чином правила перетворення початкових координат опорних точок тест-об'єкту в їх спотворені координати при реальній конфігурації системи візуалізації та високі вимоги до кваліфікації персоналу. Відомий також спосіб юстирування системи візуалізації авіаційного тренажера, який полягає у тому, що після юстирування оптичної проекційної системи на її вхід подають зображення тестоб'єкту, спостерігають зображення з точки спостереження, спотворюють координати опорних точок тест-об'єкту доти, доки кутові координати спостережуваних із заданої точки зображень цих точок не співпадуть з початковими кутовими координатами опорних точок тест-об'єкту, по спотворених координатах опорних точок тест-об'єкту знаходять правило перетворення початкових координат опорних точок тест-об'єкту в їх спотворені координати при реальній конфігурації системи візуалізації, а координати точок зображень, що подаються в систему візуалізації, попередньо спотворюють за цим правилом [див. В.А. Бормотин, М.А. Москаленко, Г.К. Потапова. /Анализ геометрии пространства видимых изображений в оптико-коллимационном устройстве системи визуализации авиационного тренажера /В кн. Матеріали міжнародної науковотехнічної конференції «АВІА-2004», т.II, Київ, 2004p.]. Недоліками цього способу є недостатня адекватність спостережуваного оператором зображення перспективи модельованої зовнішньої візуальної обстановки, відносно високі вимоги до кваліфікації персоналу, що здійснює юстирування через складність процесу юстирування за цим способом і високі вимоги до обчислювальної потужності моделюючої системи через необхідність спотворення координат всіх точок модельованого зображення у реальному масштабі часу. Найближчим до пропонованого способу юстирування системи візуалізації авіаційного тренажера і прийнятим за прототип є спосіб юстирування системи візуалізації, який полягає у тому, що заздалегідь розрахунковим шляхом визначають правило спотворення координат точок зображень, які подаються на вхід системи візуалізації для отри 4 мання неспотворених при спостереженні із заданої точки зображень при номінальній конфігурації системи візуалізації, після юстирування оптичної проекційної системи на її вхід подають спотворене за цим правилом зображення тест-об'єкту, спостерігають зображення тест-об'єкту з точки спостереження, додатково спотворюють координати опорних точок зображення тест-об'єкту доти, доки із заданої точки спостереження не спостерігатиметься неспотворене зображення тест-об'єкту, по додатково спотворених координатах зображень опорних точок тест-об'єкту визначають правило перетворення початкових координат опорних точок тест-об'єкту у спотворені координати при реальній конфігурації системи візуалізації, а координати точок зображень, що подаються в систему візуалізації, попередньо спотворюють за цим правилом [див. Г.К. Потапова /Основы теории геометрии пространства видимых изображений и ее приложения. /В кн.VI международная конференция «Прикладная оптика». Сборник трудов, т.3, СанктПетербург, 2004г.]. Недоліками цього способу є недостатня адекватність спостережуваного оператором зображення перспективи модельованої зовнішньої візуальної обстановки, складність процесу юстирування за цим способом та високі вимоги до обчислювальної потужності моделюючої системи через необхідність спотворення координат всіх точок модельованого зображення в реальному масштабі часу. Задачею корисної моделі є підвищення точності відтворення модельованої зовнішньої візуальної обстановки, створення способу юстирування, що максимально автоматизується, та зниження вимог до обчислювальної потужності авіаційного тренажера. Сутність корисної моделі полягає у тому, що у способі юстирування системи візуалізації авіаційного тренажера, який полягає у тому, що заздалегідь розрахунковим шляхом визначають правило спотворення координат точок зображень, що подаються на вхід системи візуалізації для отримання на проекційному екрані неспотворених при спостереженні із заданої точки спостереження зображень при номінальних параметрах системи візуалізації, після юстирування оптичної проекційної системи на її вхід подають спотворене за цим правилом зображення тест-об'єкту, спостерігають зображення тест-об'єкту на проекційному екрані з точки спостереження, згідно корисної моделі, додатково виміряють кутові координати спостережуваних із заданої точки спостереження зображень опорних точок тест-об'єкту на проекційному екрані, по цих координатах знаходять правило перетворення кутових координат зображення на проекційному екрані в координати опорних точок тестоб'єкту при реальній конфігурації системи візуалізації, за цим правилом спотворюють формовані моделюючою системою координати опорних точок зображення зовнішньої візуальної обстановки. Крім того, правило перетворення координат спостережуваних з заданої точки спостереження зображень на проекційному екрані опорних точок тест-об'єкту у спотворені координати опорних то 5 25508 чок тест-об'єкту знаходять шля хом проектування на проекційний екран зображення тест-об'єкту з точки спостереження, вимірювання кутових координат спостережуваного з точки проектування зображень цих точок та апроксимації отриманої залежності зміряних кутових координат від кутових координат точок тест-об'єкту. Сутність корисної моделі пояснюється кресленнями, де: - на Фіг.1а приведено зображення тест-об'єкту - фронтальної ортогональної сітки 5´7; - на Фіг.1б - спостережуване із заданої точки спостереження зображення на проекційному екрані цієї сітки при її проектуванні із заданої точки проектування; - на Фіг.2а показано вид проектованого на екран попередньо спотвореного зображення тестоб'єкту, спостережуваного при номінальних параметрах системи візуалізації на проекційному екрані із заданої точки спостереження як ортогональна сітка; - на Фіг.2б - відповідне йому зображення на проекційному екрані, спостережуване із заданої точки спостереження при номінальних параметрах системи візуалізації; - на Фіг.2в - відповідне йому зображення на проекційному екрані, спостережуване із заданої точки спостереження при реальних параметрах системи візуалізації; - на Фіг.3а представлено проектоване із заданої точки проекції попередньо спотворене зображення тест-об'єкту, яке при реальних параметрах системи візуалізації із заданої точки спостереження спостерігається на проекційному екрані як ортогональна сітка; - на Фіг.3б - показано зображення тест-об'єкту, яке спостерігалося б у системі візуалізації з реальною конфігурацією, якби на її вхід подавалося приведене на Фіг. За зображення тест-об'єкту із попередньо спотвореними описаним вище чином координатами опорних точок. Добре видно, що у цьому випадку перспективно-дисторсійні спотворення спостережуваного з точки спостереження зображення практично відсутні. Реалізацію пропонованого способу юстирування системи візуалізації авіаційного тренажера розглянемо на прикладі системи візуалізації дійсного зображення, яка містить проектор та проекційний екран. У цьому випадку за пропонованим способом, як і за відомим, по заданій номінальній конфігурації системи візуалізації (координатах точки спостереження, формі та положенні поверхні екрану, координатах точки проекції та положенню проектора, кута х проекції) заздалегідь розраховують координати зображень на проекційному екрані опорних точок тест-об'єкту, визначають функції перетворення координат a пр.оп , b пр.оп точок зображень, формованих проектором, у координати зображень на проекційному екрані цих точок a вид.оп, b вид.оп спостережуваних із заданої точки спостереження. Інтерполюючи a вид.оп=fa(a пр.оп , b пр.оп), b вид.оп=fb(a пр.оп b пр. оп) при заданій номінальній конфігурації системи візуалізації, отримують функції 6 (a пр, b пр), fb(a пр, b пр) - функції перетворення координат точок зображень, формованих проектором, в координати зображень цих точок, спостережуваних із заданої точки спостереження: =fa (a пр, b пр), b вид.=fb(a пр, b пр). Як тест-об'єкт прийнята приведена на Фіг.1а фронтальна ортогональна сітка, опорні точки - її вузли, тобто точки перетину горизонтальних і вертикальних ліній. На Фіг.1б показаний результат застосування отриманих таким чином функцій перетворення (fa и fb) координат формованих проектором точок зображень у координати зображень цих точок на проекційному екрані, до координат опорних точок тест-об'єкту - тобто вид спостережуваного із заданої точки спостереження проектованого на екран з точки проекції зображення такої сітки без попереднього спотворення координат її вузлів при номінальній конфігурації широкоформатної такої системи візуалізації тренажера широкофюзеляжного літака, у якій центр проекційного екрану та точка спостереження зміщені щодо центру віз ування моделюючої системи. Інтерполюючи залежність a пр.оп=fa звоp(a вид.оп , b вид.оп), b пр.оп=fb звор(a вид.оп , b вид.оп) при заданій номінальній конфігурації системи візуалізації, одержують функцій перетворення координат зображень на проекційному екрані, спостережуваних із заданої точки спостереження, в координати точок зображень, формованих проектором: a пр=fa звор(a вид, b вид), b пр=fb звор(a вид., b вид). Оптимальним з огляду максимального зниження вимог до обчислювальної потужності моделюючої системи є апроксимація цієї залежності ступеневими поліномами. На Фіг.2а показаний результат застосування функцій перетворення координат зображень на проекційному екрані, спостережуваних із заданої точки спостереження, у координати точок формованих проектором зображень до координат опорних точок тест-об'єкту - тобто вид спотвореного зображення тест-об'єкту, яке повинне подаватися на вхід системи візуалізації для того, щоб при номінальній конфігурації системи візуалізації з точки спостереження зображення на проекційному екрані спостерігалося як ортогональна сітка. На Фіг.2б показано зображення тест-об'єкту, яке спостерігалося б на проекційному екрані в системі візуалізації з номінальною конфігурацією, якби на її вхід подавалося приведене на Фіг.2а зображення тест-об'єкту із попередньо спотвореними описаним вище чином координатами опорних точок. Функції перетворення координат точок зображень, формованих проектором, в координати точок зображень на проекційному екрані, спостережуваних із заданої точки спостереження при реальній конфігурації системи візуалізації можуть бути знайдений шляхом подачі на вхід системи візуалізації тест-об'єкту і з неспотвореними координатами опорних точок. Тоді у визначенні розрахунковим шляхом функцій a вид.=fa(a пр, b пр) и b вид.=fb(a пр, b пр) необхідності немає, проте зображення деяких опорних точок при певних конфігураціях системи візуалізації можуть виявитися за межами проекційного екрану. У 7 25508 цьому випадку достатньо зменшити кутові розміри тест-об'єкту до таких, при яких його зображення повністю розміщується на проекційному екрані. Далі, як і за відомим способом, на вхід системи візуалізація подають зображення тест-об'єкту, координати опорних точок якого попередньо спотворюють по знайденим раніше залежності і спостерігають із заданої точки спостереження зображення на проекційному екрані. За пропонованим способом додатково визначають координати спостережуваних на проекційному екрані із заданої точки спостереження зображень опорних точок тест-об'єкту із попередньо спотвореними координатами, тобто визначають для реальної конфігурації системи візуалізації: a вид.оп=Fa(fa звор(a вид., b вид), fb звор(a вид., b вид.)) и b вид.оп=Fb(fa звор(a вид., b вид) fb звор(a вид., b вид)), де Fa(a пр, b пр), Fb(a пр , b пр) - функції перетворенні координат зображень, формованих проектором, в координати точок зображень, спостережуваних на проекційному екрані із заданої точки спостереження - точки установки оптичного координатора (наприклад, цифрового фотоапарата або цифрової відеокамери з виправленими або відомими дисторсіями об'єктивів) при реальній конфігурації системи візуалізації. На Фіг.2в представлений результат застосування знайдених таким чином функції перетворенні координат зображень, формованих проектором, в координати точок зображень, спостережуваних на проекційному екрані із заданої точки спостереження при реальній конфігурації системи візуалізації, до попередньо спотвореним застосуванням функцій перетворення координат зображень на проекційному екрані, спостережуваних із заданої точки спостереження, в координати точок зображень, формованих проектором при номінальній конфігурації системи візуалізації, координатам опорних точок тест-об'єкту - тобто вид спостережуваного на проекційному екрані із заданої точки спостереження спотвореного зображення тестоб'єкту, координати опорних точок якого спотворені так, як їх було слід би спотворювати для отримання зображення ортогональної сітки при номінальній конфігурації системи візуалізації. Далі за пропонованим способом знаходять функції a оп.вид.=Fa звор(a оп., b оп)) та b вид.оп.=Fb звор(a оп., b оп) перетворення координат точок спостережуваного з точки спостереження зображення у координати точок попередньо спотвореного зображення, необхідного при реальній конфігурації системи візуалізації. Такі функції можуть бути знайдені з очевидної умови, що координати зображень опорних точок тест-об'єкту, спостережуваних на проекційному екрані із заданої точки спостереження, повинні співпадати з координатами відповідних опорних точок самого тест-об'єкту, які поступають в систему візуалізації з попереднім спотворенням за шуканим правилом перетворення координат опорних крапок при реальній конфігурації системи візуалізації, тобто що a оп.=Fa(Fa звор(a оп., b оп)), Fb звор (a оп., b оп)), b оп=Fb(Fa звор(a оп., b оп)), Fb звор(a оп., b оп)). У випадку, який розглядається, ці функції можуть бути знайдені також шляхом формування із 8 заданої точки спостереження на проекційному екрані зображення тест-об'єкту з координатами опорних точок a оп., b оп, визначення координат a оп.вид, b оп.вид, зображення на проекційному екрані опорних точок тест-об'єкту, спостережуваного з точки проектування, та апроксимації отриманих таким чином залежностей a оп.вид=Fa звор(a оп., b оп)) та b вид.оп.=Fb звор(a оп., b оп). Зна ходженням функцій Fa звор(a оп. , b оп)) та b вид.оп.=Fb звор(a оп., b оп) закінчується юстирування системи візуалізації авіаційного тренажера. На Фіг.3а приведений результат застосування знайдених таким чином функцій Fзвop (a оп., b оп) та Fb звор(a оп. , b оп) до координат опорних точок тестоб'єкту - тобто вигляд, який повинне мати що подається на вхід системи візуалізації спотворене зображення тест-об'єкту для того, щоб на проекційному екрані воно спостерігалося б як ортогональна сітка при реальних параметрах системи візуалізації. На Фіг.3б показано зображення тестоб'єкту, яке спостерігалося б в системі візуалізації з реальною конфігурацією, якби на її вхід подавалося приведене на Фіг. За зображення тест-об'єкту із попередньо спотвореними описаним вище чином координатами опорних точок. Добре видно, що в цьому випадку перспективно-дисторсійні спотворення спостережуваного з точки спостереження зображення практично відсутні. Знайдені за пропонованим способом функції a оп.=Fa(Fa звор (a оп., b оп)), Fb звор(a оп. , b оп)), b оп=Fb(Fa звор (a оп., b оп)), Fb звор(a оп., b оп)) використовуються для попереднього спотворення кутових координат опорних точок, по яких будується зображення модельованої зовнішньої візуальної обстановки. Абсолютно аналогічно можуть бути знайдений функції попереднього спотворення (корекції) яскравості і кольоровості точок зображення модельованої зовнішньої візуальної обстановки, і так само ці функції можуть бути використаний для корекції яскравості і кольоровості лише опорних точок зображення модельованої зовнішньої візуальної обстановки, яскравість і кольоровість яких далі при формуванні зображення використовується як опорна для заповненні зображень графічних примітивів. Порівняння приведених на Фіг.2в і Фіг.3б зображень, показує ,що, на відміну від прототипу застосування пропонованого способу юстирування системи візуалізації авіаційного тренажера дозволяє отримати на проекційному екрані таке зображення, кутові координати якого при спостереженні з точки спостереження практично повністю співпадають з кутовими координатами опорних точок модельованої зовнішньої візуальної обстановки. Відомо, що скління кабіни пілотів вносить певні перспективно-дисторсіонні спотворення в спостережуване пілотом зображення закабінного простору. Тому і зображення, спостережувані оператором на тренажері за відсутності та за наявності скління кабіни тренажера, мають різні координати одних і тих же точок. Пропонований же спосіб юстирування передбачає визначення функцій перетворення координат опорних точок у тому числі і при реальній конфігурації системи візуалі 9 25508 зації, його використовування забезпечить адекватність кутови х координат точок спостережуваного зображення кутовим координатам відповідних опорних точок модельованої зовнішньої візуальної обстановки як за відсутності, так і за наявності скління кабіни тренажера. Застосування пропонованого способу припускає використовування як оптичного координатора цифрового фотоапарата. Це дає не тільки простоту визначення координат зображень опорних точок тест-об'єкту, але й простоту обміну цією інформацією з обчислювачем моделюючої системи. Все це дозволяє легко автоматизувати процес визначення функцій перетворення при реальних параметрах системи візуалізації і тим самим різко понизити вимоги як до кваліфікації здійснюючого це юстирування персоналу, так і до точності оптикомеханічного юстирування системи візуалізації. Знайдені за пропонованим способом функції попереднього перетворення координат можна застосовувати не тільки до координат точок пода 10 ються на вхід системи візуалізації зображень, але і до координат опорних точок, по яких ці зображення будуються. Кількість опорних точок модельованих зображень зовнішньої візуальної обстановки у багато разів менше точок побудованих по цих опорних точках зображень тієї ж зовнішньої візуальної обстановки, а перетворення координат необхідно виконувати в реальному масштабі часу. Завдяки цьому можна значно понизити вимоги до сумарної обчислювальної потужності моделюючої системи тренажера і його системи візуалізації. За пропонованим способом зображення зовнішньої візуальної зупинки будується з графічних примітивів із попередньо спотвореними координатами опорних точок. Тому при використовуванні пропонованого способу немає необхідності в якій би то ні було додатковій корекції спотворень зниження контрастності спостережуваного на проекційному екрані з точки спостереження зображення буде мінімальне можливим при даній реальній конфігурації системи візуалізації. 11 Комп’ютерна в ерстка C.Литв иненко 25508 Підписне 12 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for adjusting an information display system for an aviation training device
Автори англійськоюMoskalenko Mykhailo Andriiovych, Potapova Galyna Kostiantynivna, Potapova Halyna Kostiantynivna
Назва патенту російськоюСпособ настройки системы визуального представления информации для авиационного тренажера
Автори російськоюМоскаленко Михаил Андреевич, Потапова Галина Константиновна
МПК / Мітки
МПК: G09B 9/02
Мітки: системі, візуалізації, юстирування, спосіб, авіаційного, тренажера
Код посилання
<a href="https://ua.patents.su/6-25508-sposib-yustiruvannya-sistemi-vizualizaci-aviacijjnogo-trenazhera.html" target="_blank" rel="follow" title="База патентів України">Спосіб юстирування системи візуалізації авіаційного тренажера</a>
Спосіб юстирування нашоломної системи візування
Номер патенту: 49231
Опубліковано: 15.07.2005
Автор: Біляєва Галина Григорівна
МПК: G02B 23/00, G01C 21/10, G01B 11/26, G01C 21/00
Мітки: юстирування, системі, візування, нашоломної, спосіб
Формула / Реферат:
Спосіб юстирування нашоломної системи візування, яка включає візир, вимірювачі кутової швидкості розвороту голови оператора, установлені на шоломі, що полягає в орієнтації перехрестя візира в нульове положення відносно базової системи координат візира і в жорсткому закріпленні вимірювачів на шоломі оператора, який відрізняється тим, що вводять у поле зору оператора мітки стабілізації горизонтальної площини базової системи координат візира...
Спосіб юстирування та юстирувальна система тепловізійного пошуково-прицільного пристрою
Номер патенту: 79814
Опубліковано: 25.07.2007
Автори: Ємельянов Анатолій Миколайович, Лихоліт Микола Іванович, Ріділа Олександр Степанович
МПК: G02B 23/14, F41G 7/00, H04N 5/30
Мітки: пошуково-прицільного, юстирувальна, спосіб, пристрою, юстирування, система, тепловізійного
Формула / Реферат:
1. Спосіб юстирування тепловізійного пошуково-прицільного пристрою системи керування зброєю, у якому вісь ствола гармати обертається навколо осі в площині вертикальної наводки, за допомогою органів керування пристроєм вертикального наведення гармати, при цьому візирне дзеркало тепловізора, розміщене у візирній головці, синхронно відпрацьовує за віссю ствола гармати, потім установлюють коліматор з візирною маркою перед вхідною зіницею...
Спосіб повороту вікна зображення та пристрій для його реалізації
Номер патенту: 33248
Опубліковано: 15.02.2001
Автор: Романюк Олександр Никифорович
МПК: G09G 1/16
Мітки: повороту, пристрій, спосіб, вікна, зображення, реалізації
Текст:
...(З.Л. Рабинович, В.А. Рама,наускас. Типовые операции в вычислительных машинах. К.» Техніка, 1980, с 215-216 - аналог). Спосіб має низьку швидкодію, яка обумовлена тим, що нові координати однієї точки зображення обчислюються послідовно для обох координат за п тактів, що складе загальний час обчислень, рівний тривалості 2-п тактів, а також апаратна складність реалізації даного способу, яка заключаемся в необхідності спеціального...
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Карпов Анатолій Стєпановіч, Монахов Юрій Владіміровіч, Ковалєвскій Міхаіл Марковіч, Рачук Владімір Сєргєєвіч, Іванов Робєрт Константіновіч, Борісов Андрєй Владіміровіч
МПК: G01S 5/02, G01S 5/00, G01S 5/04
Мітки: об'єкта, системі, відносної, осей, варіанти, інерціальної, положення, базової, координат, навігаційної, спосіб, визначення
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Графічний спецпроцесор для систем візуалізації
Номер патенту: 37152
Опубліковано: 16.04.2001
Автори: Остроушко Андрій Павлович, Янковський Олександр Аркадійович, Гусятін Володимир Михайлович, Філімончук Михайло Анатолійович
МПК: G06F 7/00
Мітки: графічний, систем, візуалізації, спецпроцесор
Текст:
...входами першого, другого та третього вхідних регістрів, першого, др угого та третього синхронізуючих регістрів, з першого до десятого регістрів збереження результатів проміжних обчислень, першого, другого та третього ви хідних регістрів, перший і др угий ви ходи другого логарифмічного перетворювача з'єднані відповідно з четвертими і п'ятими входами першо го та другого функціональних перетворювачів і через другий та третій входи блока...
Попередній патент: Стоматологічний остеотом
Наступний патент: Кріогенна повітророздільна установка низького тиску для одночасного виробництва кисню та азоту
Випадковий патент: Спосіб захисту та відновлення деталей чавунних виробів