Пристрій для зрівноважування вантажів
Формула / Реферат
1. Пристрій для зрівноважування вантажів, який містить основу, пружинний зрівноважуючий механізм з гнучким тягнучим елементом і вантажем, який відрізняється тим, що пружинний зрівноважуючий механізм виконаний у вигляді шарнірного трикутника, установленого на основі в вертикальній площині, при цьому сторона шарнірного трикутника, працююча на розтяг, виконана у вигляді пружини.
2. Пристрій по п. 1, який відрізняється тим, що пружина виконана таким чином, що її сила рівна або близька по величині силі дії на неї вантажу в усіх його положеннях.
Текст
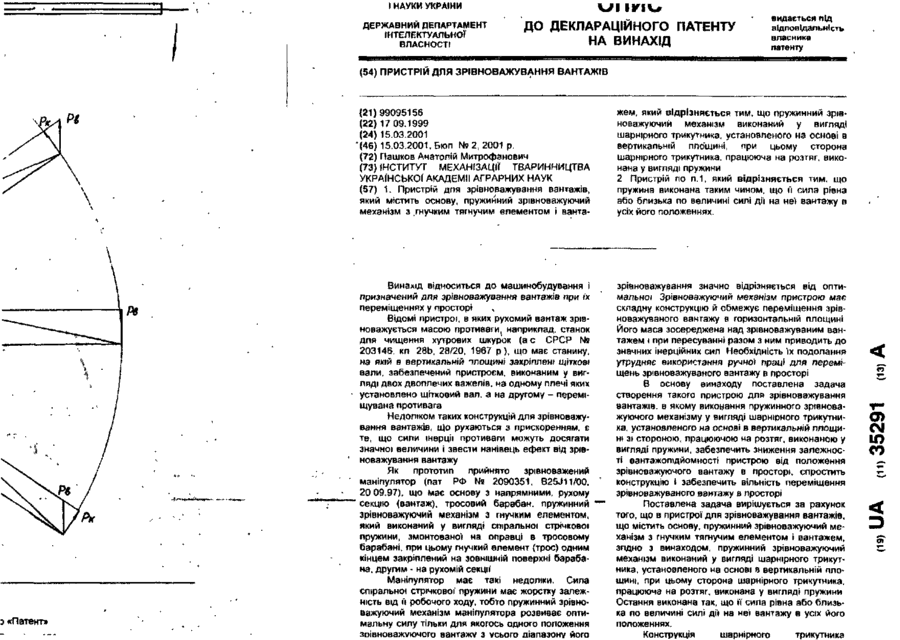
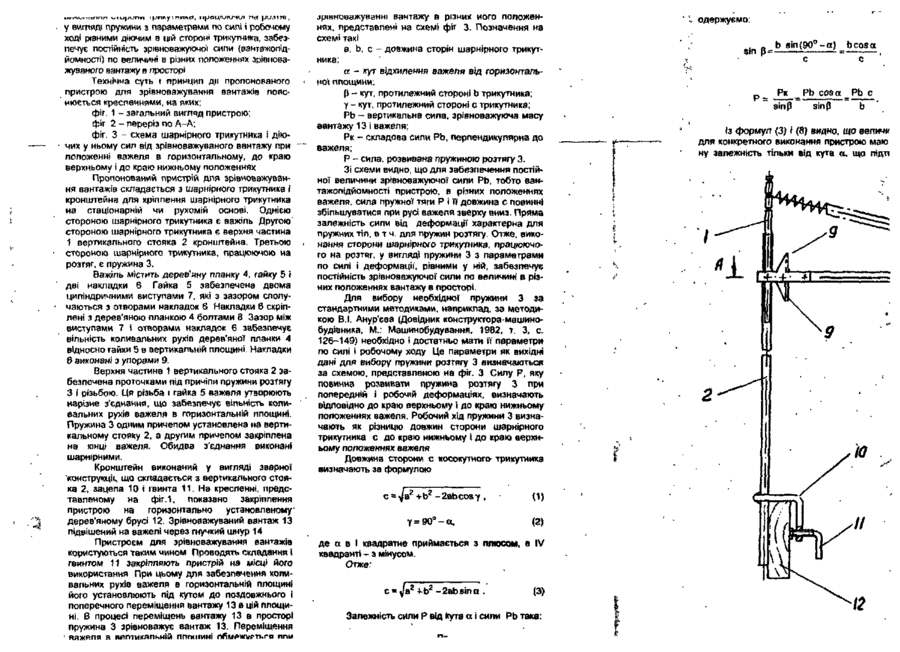
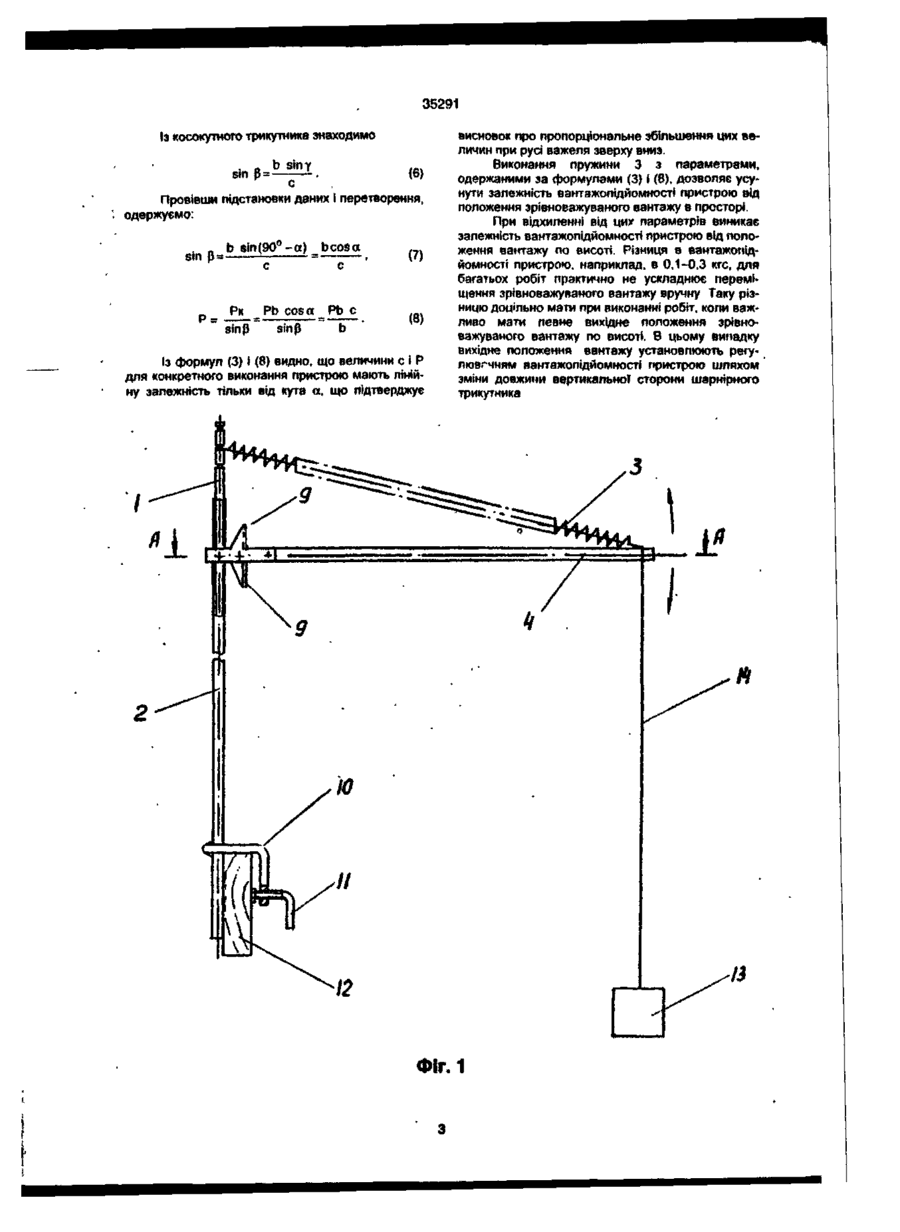
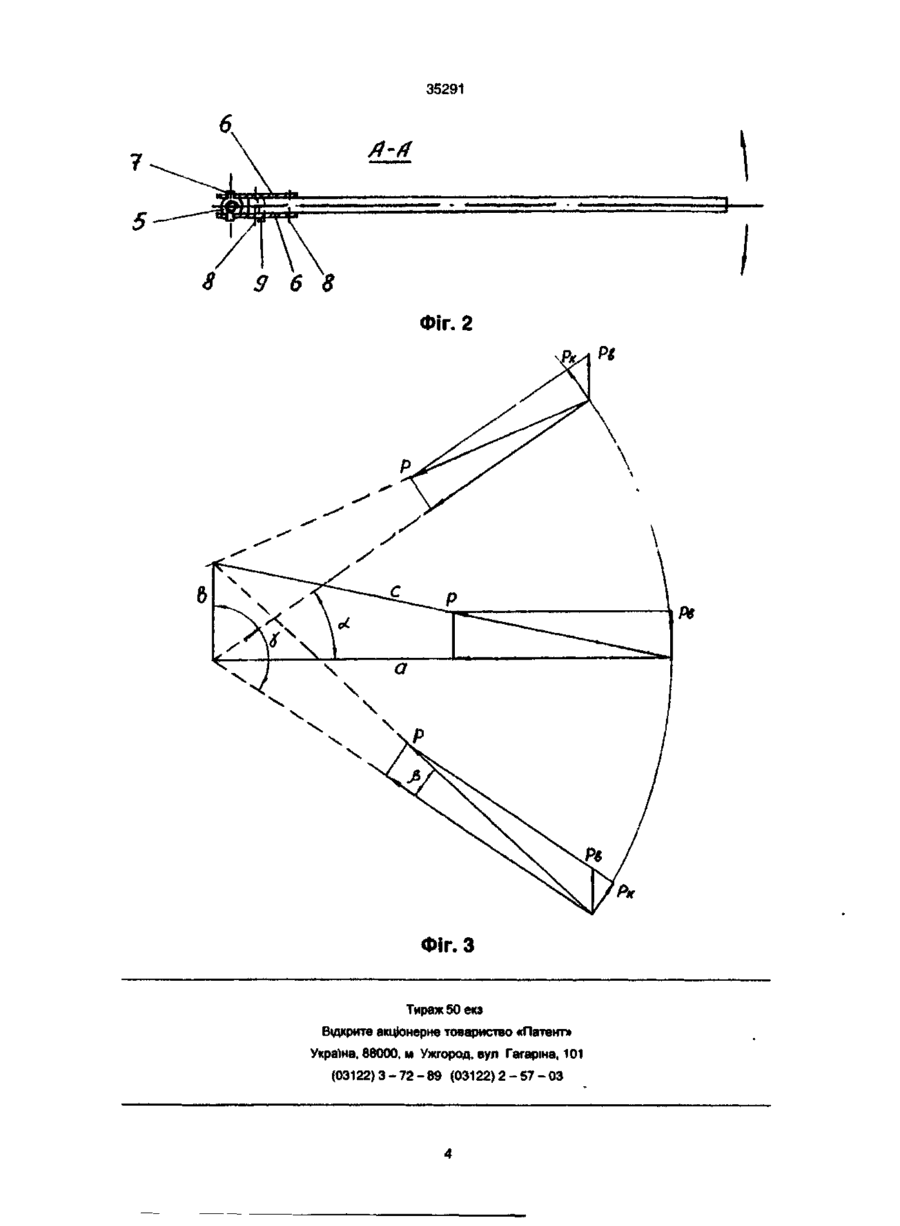
1. Пристрій дпя зрівноважування вантажів, який містить основу, пружинний зрівноважуючий механізм з .гнучким тягнучим елементом і ванта э «Патент» жем, який відрізняється тим, що пружинний зрівноважуючий механізм виконаний у вигляді шарнірного трикутника, установленого на основі в вертикальній площині, при цьому сторона шарнірного трикутника, працююча на розтяг, виконана у вигляді пружини 2 Пристрій по п.1, який відрізняється тим. що пружина виконана таким чином, що й сила рівна або близька по вепичині силі діі на неї вантажу в усіх його положеннях. Винахід відноситься до машинобудування і призначений дпя зрівноважування вантажів при їх переміщеннях у просторі Відомі пристрої, в яких рухомий вантаж зрівноважується масою противаги^ наприклад, станок дпя чищення хутрових шкурок (а с СРСР № 203146. кл 28Ь, 28/20, 1967 р ) , що має станину, на якій в вертикальній площині закріплені щіткові вали, забезпечений пристроєм, виконаним у вигляді двох двоплечих важепів. на одному плечі яких установлено щітковий вал. а на другому - переміщувана противага Недопіком таких конструкцій для зрівноважування вантажів, Що рухаються з прискоренням, є те, що сили інерції противаги можуть досягати значної величини і звести нанівець ефект від зрівноважування вантажу Як прототип прийнято зрівноважений маніпулятор (пат РФ № 2090351, B25J11/00, 20 09.97), що має основу з напрямними, рухому секцію (вантаж), тросовий барабан, пружинний зрівноважуючий механізм з гнучким елементом, який виконаний у вигляді спіральної стрічкової пружини, змонтованої на оправці в тросовому барабані, при цьому гнучкий елемент (трос) одним кінцем закріплений на зовнішній поверхні барабана, другим - на рухомій секції Маніпулятор має такі недоліки. Сипа спіральної стрічкової' пружини має жорстку залежність від й робочого ходу, тобто пружинний зрівноважуючий механізм маніпулятора розвиває оптимальну силу тільки для якогось одного положення зоівноважуючого вантажу з УСЬОГО діапазону його зрівноважування значно відрізняється від оптимальної Зрівноважуючий механізм пристрою має складну конструкцію й обмежує переміщення зрівноважуваного вантажу в горизонтальній площині Його маса зосереджена над зрівноважуваним вантажем і при пересуванні разом з ним приводить до значних інерційних сил Необхідність їх подолання утрудняє використання ручної праці для переміщень зрівноважуваного вантажу в просторі В основу винаходу поставлена задача створення такого пристрою для зрівноважування вантажів, в якому виконання пружинного зрівноважуючого механізму у вигляді шарнірного трикутника, установленого на основі в вертикальній площині зі стороною, працюючою на розтяг, виконаною у вигляді пружини, забезпечить зниження залежності вантажопідйомності пристрою від положення зрівноважуючого вантажу в просторі, спростить конструкцію і забезпечить вільність переміщення зрівноважуваного вантажу в просторі Поставлена задача вирішується за рахунок того, що в пристрої для зрівноважування вантажів, що містить основу, пружинний зрівноважуючий механізм з гнучким тягнучим елементом і вантажем, згідно з винаходом, пружинний зрівноважуючий механізм виконаний у вигляді шарнірного трикутника, установленого на основі в вертикальній площині, при цьому сторона шарнірного трикутника, працююча на розтяг, виконана у вигляді пружини Остання виконана так, що її сипа рівна або близька по вепичині силі дії на неї вантажу в усіх його положеннях. Конструкція шарнірного трикутника CM ю со 35291 стороні, працюючій на розтяг, і довжина цієї сторони лропориіонально збільшується під дією постійної маси зрівноважуваного вантажу при його русі зверху вниз Пряма залежність сили рід деформації хзраістерна для пружин розтягу. Як наслідок цього, виконання сторони трикутника, працюючої на розтяг, у вигляді пружини з параметрами по силі і робочому ході рівними діючим в щй стороні трикутника, забезпечує постійність зрівноважуючої сипи (вантажопідйомності) по величині в різних положеннях зрівноважуваного вантажу в просторі Технічна суть і принцип дії пропонованого пристрою для зрівноважування вантажів пояснюється кресленнями, на яких: фіг. 1 - загальний вигляд пристрою, фіг. 2 - переріз по А-А; фіг 3 - схема шарнірного трикутника і діючих у ньому сил від зрівноважуваного вантажу при положенні важеля в горизонтальному, до краю верхньому і до краю нижньому положеннях Пропонований пристрій для зрівноважування вантажів складається з шарнірного трикутника і кронштейна для кріплення шарнірного трикутника на стаціонарній чи рухомій основі. Однією стороною шарнірного трикутника є важіль Другою стороною шарнірного трикутника є верхня частина 1 вертикального стояка 2 кронштейна. Третьою стороною шарнірного трикутника, працюючою на розтяг, є пружина 3. Важіль містить дерев'яну планку 4, гайку 5 і дві накладки 6 Гайка 5 забезпечена двома циліндричними виступами 7, які з зазором сполучаються з отворами накладок 6. Накладки 6 скріплені з дерев'яною планкою 4 болтами 8 Зазор між виступами 7 і отворами накладок 6 забезпечує вільність коливальних рухів дерев'яної планки 4 відносно гайки 5 в вертикальній площині. Накладки 6 виконані з упорами 9. Верхня частина 1 вертикального стояка 2 забезпечена проточками під причіпм пружини розтягу З і різьбою. Ця різьба і гайка 5 важеля утворюють нарізне з'єднання, що забезпечує вільність коливальних рухів важеля в горизонтальній площині. Пружина 3 одним причепом установлена на вертикальному стояку 2, а другим причепом закріплена на кінці важеля. Обидва з'єднання виконані шарнірними. Кронштейн виконаний у вигляді зварної конструкції що складається з вертикального стояка 2, зацепа 10 і гвинта 11. На кресленні, представленому на фіг. 1. показано закріплення пристрою на горизонтально установленому дерев'яному брусі 12. Зрівноважуваний вантаж 13 підвішений на важелі через гнучкий шкур 14 Пристроєм для зрівноважування вантажів користуються таким чином Проводять складання і гвинтом 11 закріпляють пристрій на місці його використання. При цьому для забезпечення коливальних рухів важеля в горизонтальній площині його установлюють під кутом до поздовжнього і поперечного переміщення вантажу 13 в цій площині. В процесі переміщень вантажу 13 в просторі пружина 3 зрівноважує вантаж 13. Переміщення важеля в вертикальній площині обмежується при зіткненні упорів 9 з вертикальним стояком 2. вантажопідйомність пристрою може регулюватися шляхом переміщень гайки 5 по різьбі вертикально го стояка 2 і перестановкою причепа пружини 3 по довжині цього стояка. При збільшенні довжини вертикальної сторони шарнірного трикутника вантажопідйомність пристрою збільшується і навпаки. Сили, діючі в шарнірному трикутнику при зрівноважуванні вантажу в різних його положеннях, представлені на схемі фіг. 3. Позначення на схемі такі а, Ь, с - довжина сторін шарнірного трикутника; а - кут відхилення важеля від горизонтальної площини; |і - кут, протилежний стороні b трикутника; у - кут, протилежний стороні с трикутника; РЬ - вертикальна сила, зрівноважуюча масу вантажу 13 і важеля; Рк - складова сили РЬ, перпендикулярна до важеля; Р - сила, розвивана пружиною розтягу 3. Зі схеми видно, що для забезпечення постійної величини зрівноважуючої сили РЬ, тобто вантажопідйомності пристрою, в різних положеннях важеля, сила пружної тяги Р і її довжина с повинні збільшуватися при русі важеля зверху вниз. Пряма залежність сили від деформації характерна для пружних тіл, в т.ч. для пружин розтягу. Отже, виконання сторони шарнірного трикутника, працюючого на розтяг, у вигляді пружини 3 з параметрами по силі і деформації, рівними у ній, забезпечує постійність зрівноважуючої сили по величині в різних положеннях вантажу в просторі. Для вибору необхідної пружини 3 за стандартними методиками, наприклад, за методикою В І. Анур'єва (Довідник конструктора-машинобудівника, М : Машинобудування, 1982, т 3, с. 126-149) необхідно і достатньо мати її параметри по силі і робочому ходу Це параметри як вихідні дані для вибору пружини розтягу 3 визначаються за схемою, представленою на фіг. З Силу Р, яку повинна розвивати пружина розтягу 3 при попередній і робочій деформаціях, визначають відповідно до краю верхньому і до краю нижньому положеннях важеля. Робочий хід пружини 3 визначають як різницю довжин сторони шарнірного трикутника с до краю нижньому і до краю верхньому положеннях важеля. Довжина сторони с косокутного трикутника визначають за формулою с « уа 2 +b 2 - 2abcosу , у = 90°-а, (1) (2) де a в І квадратне приймається з плюсом, в IV квадранті - з мінусом. Отже: (3) Залежність сили Р від кута а і сили РЬ така: р Рк s _ sinp' Рк=РЬ- cos a (4) 35291 Із косокутного трикутника знаходимо (6) Провівши підстановки даних і перетворення, одержуємо: sin Р= b sin(900-a)_bcosot Рк sinp* Pb cos a Pb с (7) (8) Із формул (3) і (8) видно, що величини с і Р для конкретного виконання пристрою мають лінійну залежність тільки від кута а. що підтверджує висновок про пропорціональне збільшення цих величин при русі важеля зверху вниз. Виконання пружини 3 з параметрами, одержаними за формулами (3) і (8), дозволяє усунути залежність вантажопідйомності пристрою від положення зрівноважуваного вантажу в просторі. При відхиленні від цих параметрів виникає залежність вантажопідйомності пристрою від положення вантажу ло висоті. Різниця в вантажопідйомності пристрою, наприклад, в 0,1-0,3 кгс, для багатьох робіт практично не ускладнює переміщення зрівноважуваного вантажу вручну Таку різницю доцільно мати при виконанні робіт, коли важливо мати певне вихідне положення зрівноважуваного вантажу по висоті. В цьому випадку вихідне положення вантажу установлюють регулювгчням вантажопідйомності пристрою шляхом зміни довжини вертикальної сторони шарнірного трикутника іі Фіг. 1 35291 8 $ 6 8 Фіг. 2 Фіг. З Тираж 50 екз Відкрите акціонерне товариство «Патент» Україна, 88000, м Ужгород, вул Гагаріна, 101 (03122) 3 - 7 2 - 8 9 (03122) 2 - 5 7 - 0 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for balancing of loads
Автори англійськоюPashkov Anatolii Mytrofanovych
Назва патенту російськоюУстройство для уравновешивания грузов
Автори російськоюПашков Анатолий Митрофанович
МПК / Мітки
МПК: B25J 11/00
Мітки: пристрій, зрівноважування, вантажів
Код посилання
<a href="https://ua.patents.su/6-35291-pristrijj-dlya-zrivnovazhuvannya-vantazhiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для зрівноважування вантажів</a>
Пристрій для розміщення і кріплення вантажів на платформі
Номер патенту: 29934
Опубліковано: 15.11.2000
Автор: Петрухін Володимир Миколайович
МПК: B61D 3/08
Мітки: платформи, розміщення, кріплення, пристрій, вантажів
Формула / Реферат:
1. Пристрій для розміщення і кріплення вантажів на платформі, що містить розташовані по обидві сторони від поздовжньої осі платформи бокові стояки з гнучкими кріпильними елементами та їх замками, який відрізняється тим, що стояки додатково оснащені закріпленими на них гайками з гвинтами, а також напрямними, в яких установлені замки з можливістю переміщення останніх гвинтами вздовж стояків.2. Пристрій по п.1, який відрізняється тим, що...
Спосіб центрування довгомірних вантажів і пристрій для його здійснення
Номер патенту: 17486
Опубліковано: 06.05.1997
Автори: Коровець Ігор Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/06
Мітки: вантажів, центрування, спосіб, здійснення, пристрій, довгомірних
Формула / Реферат:
1. Спосіб центрування довгомірних вантажів, який включає в себе взяття вантажу на вила, нахил його на каретку, пересування вантажу до суміщення центру ваги вантажу з поздовжньою віссю захвату, який відрізняється тим, що навантаження, яке діє на каретку, передають на вертикально розміщені вали.2. Пристрій для центрування довгомірних вантажів, який має пару вил круглого січення, змонтованих на каретці навантажувача з можливістю...
Спосіб позиціювання довгомірних вантажів і пристрій для його здійснення
Номер патенту: 17826
Опубліковано: 03.06.1997
Автори: Козлинський Мирослав Петрович, Зінько Роман Володимирович
МПК: B66F 9/06
Мітки: довгомірних, позиціювання, пристрій, здійснення, вантажів, спосіб
Формула / Реферат:
1. Спосіб позиціювання довгомірних вантажів, при якому піднімають вантаж, захоплюють його гаками двотаврової балки, позиціонують, вирівнюючи в ряд, який відрізняється тим, що позиціювання здійснюють шляхом врівноважування.2. Спосіб позиціювання за п. 1, який відрізняється тим, що вантаж врівноважують, визначивши наявність кута перекосу двотаврової балки вантажопідйомного механізму.3. Пристрій для позиціювання довго-мірних...
Пристрій для підйому вантажів
Номер патенту: 29922
Опубліковано: 15.11.2000
Автори: Сенчихін Юрій Миколайович, Кутовий Едуард Миколайович, Голендер Володимир Артемович, Черногуб Іван Павлович, Петренко Андрій Віталійович
МПК: B66F 11/04, A62B 1/00
Мітки: вантажів, підйому, пристрій
Формула / Реферат:
1. Пристрій для підйому вантажів, який складається з просторової конструкції, на якій змонтовано силовий привід автоматичної та (або) ручної дії, який включає в себе: приводний двигун та (або) ручний рушій, механізм гальма, редуктор, механічно зв'язані між собою та з блоком, який відрізняється тим, що робоча поверхня блока виконана у формі гіперболоїда обертання, на яку попередньо навито декілька витків каната.2. Пристрій за п.1, який...
Пристрій для змішування і подачі сипучих вантажів
Номер патенту: 31565
Опубліковано: 15.12.2000
Автори: Рогатинська Олена Романівна, Назар Іван Йосипович, Дмитрів Дмитро Володимирович, Остапченко Олексій Вікторович
МПК: B65G 33/24, B65G 33/14, B01F 15/02
Мітки: подачі, пристрій, вантажів, змішування, сипучих
Формула / Реферат:
1. Пристрій для змішування і подачі сипучих вантажів, що містить кожух із завантажувальним вікном і, встановленим над ним, бункером, розділеним рухомими вертикальними перегородками на декілька камер для розміщення компонентів, та встановлений співвісно в кожух вал з гвинтовим робочим органом, виконаним із змінними діаметром та кроком витків, який відрізняється тим, що робоча поверхня гвинтового робочого органу виконана профільовано із...
Попередній патент: Метод точного дозування туберкуліну
Наступний патент: Спосіб виявлення метастазів та рецедиву диференційованого раку щитовидної залози у дітей
Випадковий патент: Спосіб захисту від корозії нанорозмірних металевих об'єктів